Данный способ относится к области получения, обработки и отображения геопространственной информации, компьютерным средствам преобразования, визуализации и интерпретации трехмерных моделей геоинформационных систем в трехмерном пространстве с применением технологии лазерного сканирования и может быть использован для создания трехмерных цифровых моделей объектов и территорий с целью геодезического мониторинга деформационного состояния инженерных объектов.
Известен способ получения, обработки и отображения геопространственной информации, который заключается в получении, обработке и отображении геопространственных данных с последующей визуализацией и интерпретацией геопространственной информации для геодезического мониторинга деформационного состояния инженерных объектов. [Руководство по натурным наблюдениям за деформациями гидротехнических сооружений и их оснований геодезическими методами. А.А. Карлсон, Москва. Издательство Энергия, 1980 г.], взятый в качестве прототипа.
Сущность данного способа состоит в том, что на контролируемом участке, где возведен инженерный объект, для геодезического мониторинга его деформационного состояния, создают планово-высотное обоснование (ПВО) в местной системе координат, в проектных контрольных точках на элементах конструкций инженерного объекта устанавливают геодезическую контрольно - измерительную аппаратуру (КИА), при помощи которой выполняют натурные наблюдения геодезическими методами за планово - высотными смещениями элементов конструкций инженерного объекта. По данным натурных наблюдений геодезическими методами составляют ведомости о планово - высотных смещениях элементов конструкций инженерного объекта. После интерпретации и анализа полученных данных делают заключение о деформационном состоянии инженерного объекта на контролируемом участке в определенный период времени, тем самым осуществляют мониторинг деформационного состояния инженерного объекта на контролируемом участке в определенный период времени.
Недостатком этого способа является трудоемкость процесса геодезической съемки на контролируемом участке. Также данный способ предполагает наличие человеческого фактора на всех этапах проведения измерений. Кроме того, для такого способа необходимо длительное время для получения необходимых данных и невозможность получения информации о характере деформационных процессов на месте контроля в режиме реального времени, так как показания в точке контроля записываются в ручном режиме или на флэш - носитель и только в камеральных условиях, после обработки информации, появляется возможность интерпретации полученных данных. Как следствие сказанного, снижается точность и достоверность определения планово - высотных смещений элементов конструкций контролируемого инженерного объекта, что, в конечном счете, ведет к снижению оперативности и эффективности работ при геодезическом мониторинге деформационного состояния инженерного объекта.
Решаемая техническая задача заключается в повышении эффективности способа получения, обработки, отображения и интерпретации геопространственных данных для геодезического мониторинга деформационного состояния инженерного объекта с применением технологии лазерного сканирования за счет обеспечения в режиме реального времени оперативного доступа к актуальной информации, используя технологии лазерного сканирования в трехмерном пространстве, цифровые технологии передачи информации в режиме реального времени, интернет технологии и другие источники информации. Технический результат - повышение достоверности и точности получаемых геопространственных данных за счет расширения функциональных возможностей для пользователей с использованием геоинформационных технологий лазерного сканирования в трехмерном пространстве, а также через автоматизированные цифровые источники информации получать в режиме реального времени оперативный доступ к актуальной информации на конкретный объект.
Задача достигается тем, что в представленном способе получения, обработки, отображения и интерпретации геопространственных данных для геодезического мониторинга деформационного состояния инженерного объекта, при котором создают ПВО в местной системе координат по опорным пунктам ПВО на контролируемом участке, где возведен инженерный объект, в проектных контрольных точках на элементах конструкций инженерного объекта устанавливают геодезическую контрольно - измерительную аппаратуру (КИА), при помощи которой выполняют натурные наблюдения геодезическими методами за планово - высотными смещениями элементов конструкций инженерного объекта, осуществляют геодезический мониторинг деформационного состояния инженерного объекта на контролируемом участке в определенный период времени и согласно техническому решению упомянутое ПВО выполняют с применением технологии лазерного сканирования, где в качестве опорных пунктов ПВО служат базовые станции GPS, размещенные по определенной схеме вокруг контролируемого инженерного объекта. Для выполнения натурных наблюдений в геодезическую КИА дополнительно интегрируют цифровые датчики, с помощью которых получают геопространственные данные за планово - высотными смещениями в проектных контрольных точках по координатам X,Y,Z элементов конструкций инженерного объекта, с возможностью их передачи в цифровой форме в режиме реального времени в созданную интерфейсную подсистему подготовки и постоянного обновления геопространственных данных. Кроме того, упомянутые натурные наблюдения выполняют совместно с использованием технологии лазерного сканирования контролируемого инженерного объекта, где возведен инженерный объект по упомянутым опорным пунктам ПВО. В результате лазерного сканирования определяют пространственные координаты по осям X,Y,Z облака точек отражения лазерного луча от поверхности элементов конструкций инженерного объекта и опорные пункты ПВО, которые идентифицируются на сканах, где пространственные координаты по осям X,Y соответствуют относительным плановым отметкам плановой сети ПВО, а пространственные координаты по оси Z соответствуют относительным высотным отметкам высотной сети ПВО, получают скан, передают результаты сканирования (сканы) в указанную интерфейсную подсистему. С помощью компьютерной программы регистрируют в ней сканы, получают метрическую цифровую точечную трехмерную модель контролируемого инженерного объекта, где каждая точка этой модели имеет пространственные координаты по осям X,Y,Z отраженного лазерного луча от поверхности контролируемых элементов конструкций инженерного объекта, с интегрированными в нее пространственными координатами по осям X,Y,Z проектных контрольных точек и опорных пунктов ПВО. Затем формируют виртуальные объекты «горизонтальная плоскость» и «вертикальная плоскость» путем сечения метрической цифровой точечной трехмерной модели горизонтальными и вертикальными плоскостями по проектным контрольным точкам, автоматически апроксимируя векторные геометрические примитивы «горизонтальная плоскость» и «вертикальная плоскость» в данные лазерного сканирования и получают метрическую цифровую векторную трехмерную модель контролируемого инженерного объекта в местах сечения по проектным контрольным точкам с интегрированными в нее пространственными координатами по осям X,Y,Z опорных пунктов ПВО. В этой же интерфейсной подсистеме с помощью компьютерной программы трансформируют пространственные данные в проектных контрольных точках по координатам X,Y,Z контролируемых элементов конструкций инженерного объекта в цифровой форме в режиме реального времени, полученных с помощью цифровых датчиков, интегрированных в геодезическую КИА, в данные метрической цифровой векторной трехмерной модели и получают интегральную фактическую цифровую векторную трехмерную модель контролируемого инженерного объекта на контролируемом участке в режиме реального времени. Далее в этой же интерфейсной подсистеме с помощью компьютерной программы моделируют опорную расчетную цифровую трехмерную модель контролируемого инженерного объекта, используя проектные значения пространственных координат контролируемых элементов конструкций инженерного объекта в проектных контрольных точках. Совмещают ее по проектным контрольным точкам в заданной системе координат ПВО с полученной интегральной фактической цифровой векторной трехмерной моделью. В этой же интерфейсной подсистеме с помощью компьютерной программы в автоматическом режиме распознают расхождения между фактическими значениями пространственных координат контролируемых элементов конструкций инженерного объекта интегральной фактической цифровой векторной трехмерной модели и значениями опорной расчетной цифровой трехмерной модели контролируемого инженерного объекта. Создают административную подсистему в виде сервера геопространственных данных с возможностью обработки, анализа, интерпретации и хранения полученных геопространственных данных и передают в нее из интерфейсной подсистемы подготовки и постоянного обновления геопространственных данных вышеуказанную интегральную фактическую цифровую векторную трехмерную модель контролируемого инженерного объекта. Также создают и используют интерфейсную подсистему визуализации геопространственных данных путем предоставления сервиса пользователям на основе интернет технологий, при этом геопространственные данные используют совместно с данными в проектных контрольных точках по координатам X,Y,Z контролируемых элементов конструкций инженерного объекта в цифровой форме в режиме реального времени, полученных с помощью цифровых датчиков, интегрированных в геодезическую КИА. Далее создают и используют интерфейсную подсистему геодезического мониторинга деформационного состояния инженерного объекта, в которой сравнивая полученные данные с предельно-допустимыми значениями планово-высотных смещений контролируемых элементов конструкций инженерного объекта, получают пространственные данные по координатам X,Y,Z о планово - высотных смещениях контролируемых элементов конструкций инженерного объекта в режиме реального времени путем вычисления в автоматическом режиме расхождения между фактическими значениями интегральной фактической цифровой векторной трехмерной модели и соответствующими значениями опорной расчетной цифровой трехмерной модели контролируемого инженерного объекта в системе координат ПВО, с возможностью визуализации текущей ситуации на контролируемом участке. Тем самым осуществляют упомянутый геодезический мониторинг деформационного состояния инженерного объекта в режиме реального времени.
Указанная совокупность признаков позволяет повысить эффективность способа получения, обработки, отображения и интерпретации геопространственных данных для геодезического мониторинга деформационного состояния инженерного объекта с применением технологии лазерного сканирования за счет обеспечения в режиме реального времени оперативного доступа к актуальной информации и повышения ее точности, а значит достоверности, используя технологии лазерного сканирования в трехмерном пространстве, цифровые технологии передачи информации в режиме реального времени, интернет технологии и другие источники информации.
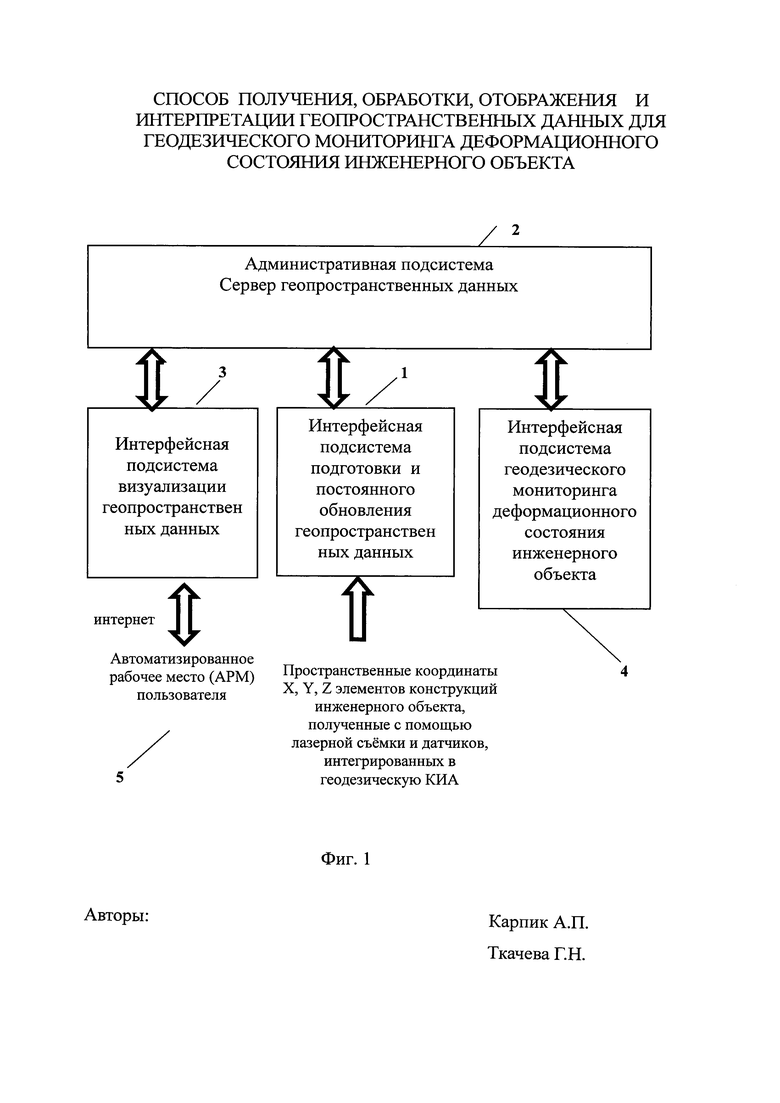
Способ поясняется чертежом, на котором показан пример конкретного исполнения, где на фиг. 1 представлена структурная схема взаимодействия блоков сервиса предоставления геопространственной информации с применением технологии лазерного сканирования в трехмерном пространстве и цифровой технологии передачи информации в режиме реального времени.
Предлагаемый способ осуществляется следующим образом. Для геодезического мониторинга деформационного состояния инженерного объекта на контролируемом участке создают ПВО по координатам X,Y,Z с помощью наземной или мобильной сканерной геодезической съемки, где в качестве опорных пунктов ПВО служат базовые станции GPS, размещенные по определенной схеме вокруг контролируемого инженерного объекта. В контрольных точках на элементах конструкций инженерного объекта в установленную по проекту геодезическую КИА, дополнительно интегрируют цифровые датчики, с помощью которых получают пространственные данные за планово - высотными смещениями в контрольных точках по координатам X,Y,Z элементов конструкций инженерного объекта, с возможностью их передачи в цифровой форме в режиме реального времени в созданную интерфейсную подсистему (1) подготовки и постоянного обновления геопространственных данных, которая реализована в виде автоматизированного рабочего места пользователя с персональным компьютером (ПК) с общим и прикладным программным обеспечением обработки, отображения и преобразования информации. Далее выполняют натурные наблюдения с помощью технологии лазерного сканирования контролируемого инженерного объекта и контролируемого участка, где возведен инженерный объект по опорным пунктам ПВО. Создают и постоянно поддерживают в актуальном состоянии базу данных цифровых трехмерных моделей контролируемого инженерного объекта в указанной интерфейсной подсистеме (1). Передают в нее результаты лазерного сканирования в виде пространственных координат по осям X,Y,Z точек поверхности контролируемого инженерного объекта. В результате лазерного сканирования определяют пространственные координаты по осям X,Y,Z точек отражения лазерного луча от поверхности элементов инженерного объекта и опорные пункты ПВО, которые идентифицируются на сканах, где пространственные координаты по осям X,Y соответствуют относительным плановым отметкам плановой сети ПВО, а пространственные координаты по оси Z соответствуют относительным высотным отметкам высотной сети ПВО. Получают скан, передают результаты сканирования (сканы) в указанную интерфейсную подсистему(1). С помощью компьютерной программы регистрируют в ней сканы, получают метрическую цифровую точечную трехмерную модель контролируемого инженерного объекта, где каждая точка этой модели имеет пространственные координаты по осям X,Y,Z отраженного лазерного луча от поверхности элементов конструкций контролируемого инженерного объекта, с интегрированными в нее пространственными координатами по осям X,Y,Z опорных пунктов ПВО. Затем в этой же интерфейсной подсистеме (1) формируют виртуальные объекты «горизонтальная плоскость» и «вертикальная плоскость» путем сечения метрической цифровой точечной трехмерной модели горизонтальными и вертикальными плоскостями по контрольным точкам, автоматически апроксимируя векторные геометрические примитивы «горизонтальная плоскость» и «вертикальная плоскость» в данные лазерного сканирования и получают метрическую цифровую векторную трехмерную модель контролируемого инженерного объекта в местах сечения с интегрированными в нее пространственными координатами по осям X,Y,Z опорных пунктов ПВО. В этой же интерфейсной подсистеме (1)с помощью компьютерной программы трансформируют пространственные данные в проектных контрольных точках по координатам X,Y,Z контролируемых элементов конструкций инженерного объекта в цифровой форме в режиме реального времени, полученных с помощью цифровых датчиков, интегрированных в геодезическую КИА, в данные метрической цифровой векторной трехмерной модели и получают интегральную фактическую цифровую векторную трехмерную модель контролируемого инженерного объекта на контролируемом участке в режиме реального времени. Далее в этой же интерфейсной подсистеме (1) с помощью компьютерной программы моделируют эталонную расчетную цифровую трехмерную модель контролируемого инженерного объекта, используя проектные значения пространственных координат контролируемых элементов конструкций инженерного объекта в проектных контрольных точках. Построение указанной модели осуществляется посредством любого известного продукта, например AutoCAD. Совмещают ее по проектным контрольным точкам геодезической КИА и по осям X,Y,Z опорных пунктов ПВО в заданной системе координат ПВО с полученной интегральной фактической цифровой векторной трехмерной моделью. С помощью компьютерной программы в автоматическом режиме распознают расхождения между фактическими значениями пространственных координат контролируемых элементов конструкций инженерного объекта интегральной фактической цифровой векторной трехмерной модели и значениями эталонной расчетной цифровой трехмерной модели контролируемого инженерного объекта. Получают интегральную фактическую цифровую векторную трехмерную модель деформационного состояния контролируемого инженерного объекта на контролируемом участке в виде планово - высотных смещений элементов конструкций инженерного объекта по координатам X,Y,Z в заданной системе координат ПВО в цифровой форме в режиме реального времени. Далее создают административную подсистему (2) в виде сервера геопространственных данных с возможностью обработки, анализа, интерпретации и хранения полученных геопространственных данных и передают в нее из интерфейсной подсистемы (1) вышеуказанную интегральную фактическую цифровую векторную трехмерную модель контролируемого инженерного объекта. Создают и используют интерфейсную подсистему (3) визуализации геопространственных данных путем предоставления сервиса пользователям на основе интернет технологий, при этом геопространственные данные используют совместно с данными в проектных контрольных точках по координатам X,Y,Z контролируемых элементов конструкций инженерного объекта в цифровой форме в режиме реального времени, полученных с помощью цифровых датчиков, интегрированных в геодезическую КИА. Также создают и используют интерфейсную подсистему (4) геодезического мониторинга деформационного состояния инженерного объекта, в которой сравнивая полученные данные с предельно-допустимыми значениями планово-высотных смещений контролируемых элементов конструкций инженерного объекта, получают пространственные данные по координатам X,Y,Z о планово - высотных смещениях контролируемых элементов конструкций инженерного объекта в режиме реального времени путем вычисления в автоматическом режиме расхождения между фактическими значениями интегральной фактической цифровой векторной трехмерной модели и соответствующими значениями эталонной расчетной цифровой трехмерной модели контролируемого инженерного объекта в системе координат ПВО, с возможностью визуализации текущей ситуации на контролируемом участке, тем самым осуществляют упомянутый геодезический мониторинг деформационного состояния инженерного объекта в режиме реального времени.
Далее создают система поиска нужного фрагмента инженерного объекта и доступа к нему, выделяя вышеуказанный фрагмент на модели по координатам путем предоставления сервиса пользователям на основе интернет технологий через интерфейсную подсистему (3) предоставления геопространственных данных с возможностью запроса, визуализации и экспорта запрашиваемых геопространственных данных. Затем используют интерфейсную подсистему (4) мониторинга оперативной обстановки в которой создают систему расчета последствий при деформации инженерного объекта с возможностью запроса, визуализации и формирования отчетов в виде сводных таблиц, ведомостей, графиков и ситуационных карт для планирования мероприятий либо ликвидации последствий чрезвычайных ситуаций на контролируемом участке путем вычисления в автоматическом режиме расхождения между фактическими значениями интегральной фактической цифровой векторной трехмерной модели и соответствующими значениями эталонной расчетной цифровой трехмерной модели контролируемого инженерного объекта в системе координат ПВО, с возможностью визуализации текущей ситуации на контролируемом участке.
Пользователь, имеющий аккредитацию на сервисе, получает через интернет нужный фрагмент в виде цифровой метрической точечной модели заданной территории на свой рабочий компьютер (5), обрабатывает этот фрагмент средствами, размещенными в административной подсистеме (2) или в собственных программах и получает результат для дальнейшего использования в виде цифровой метрической и визуальной информации. Таким образом пользователям предоставляется возможность через интернет получать оперативный доступ к актуальной информации на конкретный инженерный объект в виде цифровых трехмерных моделей.
Предлагаемый инновационный способ получения, обработки, отображения и интерпретации геопространственной информации позволяет значительно повысить экономическую эффективность работ, информативность и точность данных об инженерных объектах и как следствие обеспечить их безопасную эксплуатацию.
Изобретение относится к области создания трехмерных цифровых моделей. Технический результат – повышение достоверности и точности получаемых геопространственных данных за счет использования технологий лазерного сканирования в трехмерном пространстве. Способ получения, обработки, отображения и интерпретации геопространственных данных для геодезического мониторинга деформационного состояния инженерного содержит этапы, на которых создают планово-высотное обоснование (ПВО) в местной системе координат по опорным пунктам ПВО на контролируемом участке, где ПВО выполняют с применением технологии лазерного сканирования, где в качестве опорных пунктов ПВО служат базовые станции GPS, размещенные по определенной схеме вокруг контролируемого инженерного объекта; в контрольных точках на элементах конструкций инженерного объекта устанавливают геодезическую контрольно-измерительную аппаратуру (КИА), при помощи которой выполняют натурные наблюдения геодезическими методами за планово-высотными смещениями элементов конструкций инженерного объекта, при этом в упомянутую КИА дополнительно интегрируют цифровые датчики, с помощью которых получают геопространственные данные по координатам X,Y,Z элементов конструкций инженерного объекта. 1 ил.
Способ получения, обработки, отображения и интерпретации геопространственных данных для геодезического мониторинга деформационного состояния инженерного объекта, при котором создают планово-высотное обоснование по опорным пунктам (ПВО) в местной системе координат на контролируемом участке, где возведен инженерный объект, в проектных контрольных точках на элементах конструкций инженерного объекта устанавливают геодезическую контрольно-измерительную аппаратуру (КИА), при помощи которой выполняют натурные наблюдения геодезическими методами за планово-высотными смещениями элементов конструкций инженерного объекта, осуществляют геодезический мониторинг деформационного состояния инженерного объекта на контролируемом участке в определенный период времени, отличающийся тем, что упомянутое ПВО выполняют с применением технологии лазерного сканирования, где в качестве опорных пунктов ПВО служат базовые станции GPS, размещенные по определенной схеме вокруг контролируемого инженерного объекта,
а для выполнения натурных наблюдений в геодезическую КИА дополнительно интегрируют цифровые датчики, с помощью которых получают геопространственные данные за планово-высотными смещениями в проектных контрольных точках по координатам X,Y,Z элементов конструкций инженерного объекта, с возможностью их передачи в цифровой форме в режиме реального времени в созданную интерфейсную подсистему подготовки и постоянного обновления геопространственных данных,
кроме того, упомянутые натурные наблюдения выполняют совместно с использованием технологии лазерного сканирования контролируемого инженерного объекта, где возведен инженерный объект по упомянутым опорным пунктам ПВО, в результате лазерного сканирования определяют пространственные координаты по осям X,Y,Z облака точек отражения лазерного луча от поверхности элементов конструкций инженерного объекта и опорные пункты ПВО, которые идентифицируются на сканах, где пространственные координаты по осям X,Y соответствуют относительным плановым отметкам плановой сети ПВО, а пространственные координаты по оси Z соответствуют относительным высотным отметкам высотной сети ПВО, получают скан, передают результаты сканирования (сканы) в указанную интерфейсную подсистему, с помощью компьютерной программы регистрируют в ней сканы, получают метрическую цифровую точечную трехмерную модель контролируемого инженерного объекта, где каждая точка этой модели имеет пространственные координаты по осям X,Y,Z отраженного лазерного луча от поверхности контролируемых элементов конструкций инженерного объекта, с интегрированными в нее пространственными координатами по осям X,Y,Z проектных контрольных точек и опорных пунктов ПВО,
формируют виртуальные объекты «горизонтальная плоскость» и «вертикальная плоскость» путем сечения метрической цифровой точечной трехмерной модели горизонтальными и вертикальными плоскостями по проектным контрольным точкам, автоматически апроксимируя векторные геометрические примитивы «горизонтальная плоскость» и «вертикальная плоскость» в данные лазерного сканирования, и получают метрическую цифровую векторную трехмерную модель контролируемого инженерного объекта в местах сечения по проектным контрольным точкам с интегрированными в нее пространственными координатами по осям X,Y,Z опорных пунктов ПВО,
в этой же интерфейсной подсистеме с помощью компьютерной программы трансформируют пространственные данные в проектных контрольных точках по координатам X,Y,Z контролируемых элементов конструкций инженерного объекта в цифровой форме в режиме реального времени, полученных с помощью цифровых датчиков, интегрированных в геодезическую КИА, в данные метрической цифровой векторной трехмерной модели и получают интегральную фактическую цифровую векторную трехмерную модель контролируемого инженерного объекта на контролируемом участке в режиме реального времени,
далее в этой же интерфейсной подсистеме с помощью компьютерной программы моделируют эталонную расчетную цифровую трехмерную модель контролируемого инженерного объекта, используя проектные значения пространственных координат контролируемых элементов конструкций инженерного объекта в проектных контрольных точках,
совмещают ее по проектным контрольным точкам в заданной системе координат ПВО с полученной интегральной фактической цифровой векторной трехмерной моделью,
в этой же интерфейсной подсистеме с помощью компьютерной программы в автоматическом режиме распознают расхождения между фактическими значениями пространственных координат контролируемых элементов конструкций инженерного объекта интегральной фактической цифровой векторной трехмерной модели и значениями эталонной расчетной цифровой трехмерной модели контролируемого инженерного объекта,
создают административную подсистему в виде сервера геопространственных данных с возможностью обработки, анализа, интерпретации и хранения полученных геопространственных данных и передают в нее из интерфейсной подсистемы подготовки и постоянного обновления геопространственных данных вышеуказанную интегральную фактическую цифровую векторную трехмерную модель контролируемого инженерного объекта, создают и используют интерфейсную подсистему визуализации геопространственных данных путем предоставления сервиса пользователям на основе интернет-технологий, при этом геопространственные данные используют совместно с данными в проектных контрольных точках по координатам X,Y,Z контролируемых элементов конструкций инженерного объекта в цифровой форме в режиме реального времени, полученных с помощью цифровых датчиков, интегрированных в геодезическую КИА, создают и используют интерфейсную подсистему геодезического мониторинга деформационного состояния инженерного объекта, в которой, сравнивая полученные данные с предельно-допустимыми значениями планово-высотных смещений контролируемых элементов конструкций инженерного объекта, получают пространственные данные по координатам X,Y,Z о планово-высотных смещениях контролируемых элементов конструкций инженерного объекта в режиме реального времени путем вычисления в автоматическом режиме расхождения между фактическими значениями интегральной фактической цифровой векторной трехмерной модели и соответствующими значениями эталонной расчетной цифровой трехмерной модели контролируемого инженерного объекта в системе координат ПВО, с возможностью визуализации текущей ситуации на контролируемом участке, тем самым осуществляют упомянутый геодезический мониторинг деформационного состояния инженерного объекта в режиме реального времени.
| КАРЛСОН А | |||
| А., Руководство по натурным наблюдениям за деформациями гидротехнических сооружений и их оснований геодезическими методами, Москва, Энергия, 1980, с | |||
| Питательное приспособление к трепальным машинам для лубовых растений | 1922 |
|
SU201A1 |
| ОЦЕНИВАНИЕ ПОВЕРХНОСТНЫХ ДАННЫХ | 2011 |
|
RU2549127C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ХРАНЕНИЯ И БЫСТРОГО ИЗВЛЕЧЕНИЯ ВЫСОТНЫХ ОТМЕТОК ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В СИСТЕМАХ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 2003 |
|
RU2326434C2 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 7768441 B2, 03.08.2010 | |||
| КОРГИНА М | |||
| А | |||
| и др., Интегрированная информационная технология мониторинга технического состояния зданий и сооружений, Научно-технический журнал Вестник МГСУ, Специальный выпуск 1, 2009, с.42-45 [найдено 10.08.2018] | |||
| Найдено в Интернет по адресу: [http://www.vestnikmgsu.ru/index.php/ru/archive]. | |||

