Изобретение относится к лифту с датчиком для регистрации вибраций и к способу эксплуатации такого лифта в соответствии с объектом патентных притязаний.
Лифт имеет подвижные механические компоненты, такие как приводной механизм, двери кабины и шахты, привод дверей кабины, механизм закрывания дверей кабины, направляющие ролики или направляющий башмак, и их безупречное функционирование должно быть обеспечено. Для этого отдельные компоненты лифта через равномерные временные интервалы подвергаются техническому обслуживанию и содержатся в исправном состоянии. Затраты на такие работы по техническому обслуживанию относительно невелики, так как задаются фиксированные интервалы между проведением работ по техническому обслуживанию и не принимается в расчет фактический износ конкретного лифта и его компонентов.
Надежным признаком степени износа подвижных механических компонентов лифта является уровень вибраций. В процессе нормальной надежной работы определенный уровень вибраций не превышается. При прогрессирующем износе компонентов лифта вибрации заметно усиливаются. Если превышается задаваемый уровень вибраций, то пришло время снова привести компоненты лифта в исправное состояние или заменить их.
Вибрации распространяются в виде звуковых волн или волн корпусных шумов и могут быть зарегистрированы посредством датчика. Под звуковыми волнами в данном случае следует понимать волны, которые распространяются в газообразной среде, такой как воздух, а под волнами корпусных шумов в данном случае следует понимать волны, которые распространяются в твердой среде, такой как сталь или железо. Для регистрации звуковых волн или волн корпусных шумов пригодны датчики, выполненные в виде микрофонов, датчиков ускорения или датчиков измерения напряжения. Схема обработки сигналов и, по меньшей мере, один предназначенный ей датчик образуют контрольный блок. Схема обработки сигналов имеет процессор, посредством которого схема обработки сигналов осуществляет анализ зарегистрированных звуковых волн или волн корпусных шумов. Зарегистрированные звуковые волны или волны корпусных шумов могут быть проанализированы в схеме обработки сигналов в отношении их амплитуд и частот, а также может быть произведено их сравнение с заданным значением. На основании этого можно сделать выводы касательно работоспособности лифта и его компонентов. При превышении определенного порогового значения может быть запущен сигнал изменения состояния. Соответственно, мероприятия по техническому обслуживанию лифта могут быть осуществлены эффективным образом, то есть именно тогда, когда компоненты лифта фактически должны быть подвергнуты техническому обслуживанию. Описание изобретения к патенту WO 2009/126140 А1 демонстрирует, к примеру, такой способ анализа и сравнения.
В WO 2009/126140 А1 не определяется, однако, достоверность оценки. Так как вибрации лифта в процессе нормального режима работы создаются не только подвижными компонентами лифта. Перемещения пассажиров в кабине или аварийный останов кабины также могут вызывать вибрации, которые возможно превысят пороговое значение и тем самым запустят сигнал изменения состояния. Поэтому такой контроль чреват ошибочными запусками сигнала изменения состояния.
Другой нерешенной проблемой является оснащение имеющегося лифта контрольными блоками. Так как имеющаяся система управления лифтом не предусмотрена для того, чтобы анализировать информацию контрольного блока или вообще передавать на контрольный блок информацию о состоянии, как, например, рабочее состояние лифта, скорость или положение кабины. Эта проблема в WO 2009/126140 А1 не рассматривается.
Поэтому в основе изобретения лежит задача создания улучшенного и более надежного контрольного блока для осуществления контроля за компонентами лифта, в частности, посредством регистрации и анализа вибраций.
В следующем аспекте изобретения должна предусматриваться возможность несложным образом оснащать имеющийся лифт контрольным блоком для осуществления контроля за компонентами системы.
Задача решается посредством лифта, который имеет датчик и схему обработки сигналов. При этом посредством датчика могут регистрироваться вибрации, возникающие в процессе работы лифта. Схема обработки сигналов соединена с датчиком. Зарегистрированные посредством датчика вибрации могут быть проанализированы посредством схемы обработки сигналов. Для лифта посредством схемы обработки сигналов зарегистрированные вибрации могут сравниваться с задаваемым рабочим значением и с задаваемым пороговым значением.
Рабочее значение представляет собой значение вибраций, которые возникают в процессе допустимого нормального режима работы лифта. Пороговое значение, напротив, представляет собой недопустимое значение вибраций.
В ходе бесперебойной работы с исправным функционированием компонентов лифта образующиеся вибрации укладываются в характеристический частотный и/или амплитудный спектр. При прогрессирующем износе и старении компонентов лифта, соответственно, изменяется и этот частотный или амплитудный спектр. Эти изменения в характере вибраций могут быть зарегистрированы посредством датчика как звуковые волны и волны корпусных шумов.
Вибрации в виде звуковых волн и волн корпусных шумов записываются датчиком, передаются далее на схему обработки сигналов и там подвергаются спектральному анализу. То есть вибрации анализируются в отношении амплитуды и частоты. Проанализированные таким образом вибрации сравниваются с рабочим значением и с пороговым значением. Рабочее значение представляет собой значение вибраций, которое обычно возникает в режиме нормальной работы лифта. Пороговое значение, напротив, представляет собой недопустимое значение вибраций, которое указывает на сбой в работе или на чрезмерный износ компонентов лифта. Для осуществления такого анализа схема обработки сигналов имеет, по меньшей мере, один процессор, который производит спектральный анализ и сравнение значений, а также запоминающее устройство, в котором сохранены рабочее значение и пороговое значение.
Преимуществом такого двухступенчатого сравнения значений является установление рабочего значения. Так как тем самым без обратного запроса схемы обработки сигналов можно установить, находится ли лифт в рабочем положении или он остановлен. Это является преимуществом именно при дополнительном оснащении лифта. Так, к примеру, схема обработки сигналов во время останова лифта может самостоятельно принимать решение в отношении того, можно ли перевести необходимые элементы контрольного устройства в режим ожидания и затем снова вывести их из режима ожидания, когда схема обработки сигнала установит рабочее значение.
В следующем аспекте изобретения посредством схемы обработки сигналов на основании сравнения вибраций с рабочим значением и с пороговым значением может быть рассчитан качественный показатель. Качественный показатель рассчитывается из соотношения между временным интервалом, в течение которого достигается или превышается пороговое значение, и временным интервалом, в течение которого достигается или превышается рабочее значение. Схема обработки сигналов сравнивает это значение качественного показателя с задаваемым критическим значением качественного показателя. Критическое значение качественного показателя в предпочтительном варианте сохранено в запоминающем устройстве. Если достигается или превышается критическое значение качественного показателя, то может быть запущен сигнал изменения состояния. Сигнал изменения состояния извещает о том, что, по меньшей мере, один компонент контролируемого лифта следует заменить или отремонтировать.
Благодаря расчету качественного показателя и сравнению его с критическим значением качественного показателя в дальнейшем могут быть предотвращены ложные запуски сигнала изменения состояния. Так единичные случаи, например аварийный останов или перемещения пассажиров в кабине, приводящие к появлению вибраций, значения которых превышают пороговое значение, можно отфильтровать посредством анализа порогового значения во времени. Такие единичные случаи не приводят в данном случае автоматически к нежелательному запуску сигнала изменения состояния. Таким образом, гарантируется, что во время работы лифта сигнал изменения состояния запускается лишь под действием тех вибраций, которые превышают пороговое значение в течение более длительного временного интервала.
В следующем аспекте изобретения при значениях ниже рабочего значения во время задаваемого временного интервала может быть запущен сигнал изменения состояния. Таким образом, схема обработки сигналов может тестировать функциональность датчика и соединения с датчиком. Причем каждый лифт имеет определенную характеристику использования. Так лифт в офисном здании в течение рабочего времени постоянно используется, а ночью и в выходные дни, за исключением отдельных случаев, не эксплуатируется. Поэтому на основании этого можно сделать заключение о том, что лифт, начиная с конца недели, не эксплуатируется максимально примерно 62 часа, а именно с вечера пятницы примерно с 18 часов до утра понедельника примерно до 8 часов. В рабочие дни время простоя может уменьшаться, соответственно, примерно до 14 часов. В жилом доме с большим количеством квартир, напротив, лифт обычно в дневное время, то есть и в субботу, и в воскресенье, используется в течение дня постоянно до позднего вечера. Более длительные простои следует ожидать, прежде всего, ночью между примерно 22 и 6 часами. Поэтому в большом жилом доме время простоя составляет максимально около 8 часов. Поэтому схема обработки сигнала может быть конфигурирована таким образом, что когда она в течение определенного временного интервала, примерно в течение 8, 14 или более часов, не получает никаких сигналов вибраций от соответствующего датчика, то она запускает сигнал изменения состояния.
В частности, при таком типе сигнала изменения состояния может быть передана также причина запуска сигнала, а именно выход из строя датчика или нарушение соединения с датчиком, что облегчает специалисту по техническому обслуживанию задачу локализации неисправности.
В особо предпочтительном варианте осуществления схема обработки сигналов имеет блок временных данных. Таким образом, схема обработки сигналов может задавать временной интервал до запуска сигнала изменения состояния по причине отсутствия рабочего значения, в зависимости от времени дня и/или дня. Так, в течение дня в часто используемом лифте при значениях вибраций ниже рабочего значения в течение, по меньшей мере, одного часа уже может быть запущен сигнал изменения состояния. В небольшом жилом доме, напротив, запуск сигнала изменения состояния может быть осуществлен лишь по истечении нескольких недель, так как лифт, к примеру, во время летних каникул может длительное время не использоваться.
Следующий аспект изобретения относится к установлению рабочего значения посредством пробного хода лифта. Этот пробный ход осуществляется после установки схемы обработки сигналов и соответствующего датчика. При этом датчик записывает вибрации, создаваемые во время этого пробного хода, а схема обработки сигналов сохраняет эти вибрации в виде рабочего значения в запоминающем устройстве.
Преимущество регистрации рабочего значения посредством пробного хода состоит в том, что постоянно, вне зависимости от типа лифта, может быть установлено одно и то же контрольное устройство, состоящее из датчика и схемы обработки сигналов. Это снижает затраты на координацию при конфигурировании и заказе контрольного устройства. К тому же, исключен монтаж контрольного блока с неправильно сохраненным рабочим значением.
В альтернативном варианте рабочее значение может быть заранее сохранено в запоминающем устройстве схемы обработки сигналов, в зависимости от типа лифта. При этом этап пробного хода может быть исключен.
В предпочтительном варианте посредством схемы обработки сигналов после регистрации рабочего значения посредством пробного хода рассчитывается пороговое значение. При этом рабочее значение служит в качестве исходного значения. Записанные для рабочего значения амплитуды частот в спектральном анализе умножаются при этом на возможно заданный сомножитель. В результате рассчитанное пороговое значение сохраняется в запоминающем устройстве.
В альтернативном варианте пороговое значение может быть заранее сохранено в запоминающем устройстве схемы обработки сигналов, в зависимости от типа лифта.
В соответствии со следующим аспектом способа при запуске сигнала изменения состояния предусматривается проведение работ по техническому обслуживанию лифта. При этом специалист по техническому обслуживанию уведомляется о том, что необходимо произвести работы по техническому обслуживанию лифта. Это повышает эффективность работ по техническому обслуживанию, так как работы по техническому обслуживанию производятся лишь тогда, когда компоненты лифта действительно нуждаются в ремонте или замене.
Изобретение поясняется и описывается далее на основании примеров осуществления и чертежей, на которых представлены:
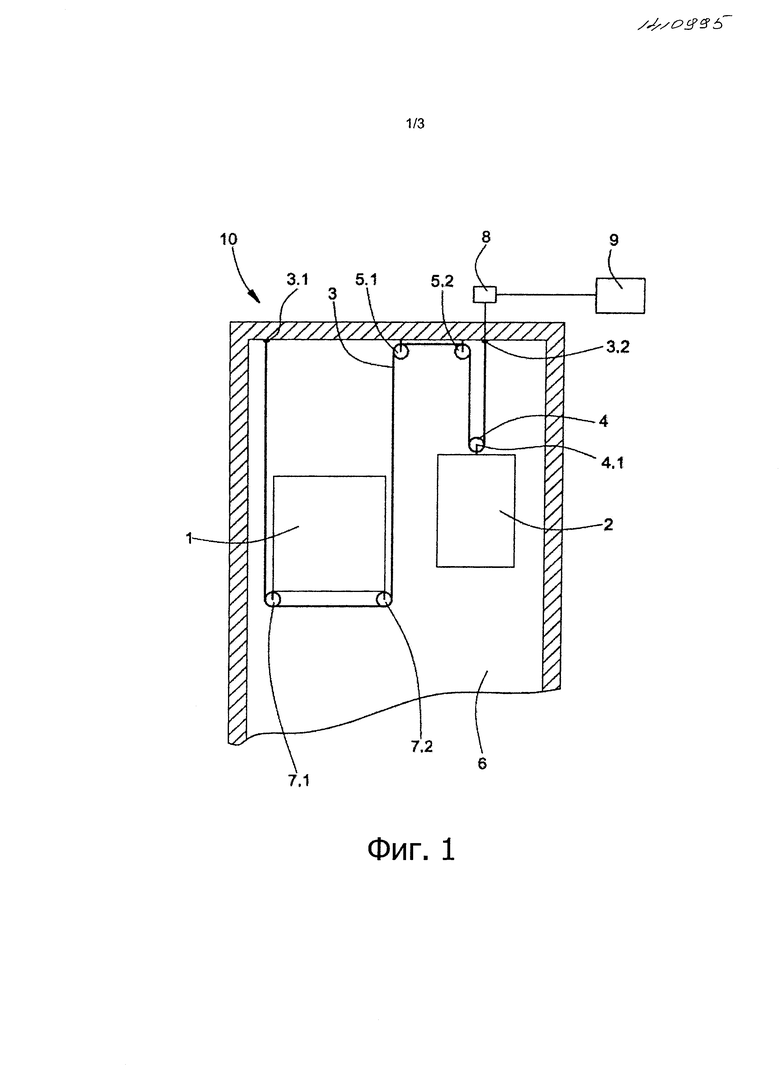
фиг.1 - вариант осуществления лифта с датчиком регистрации вибраций, которые образуются на противовесе вследствие неисправностей компонентов лифта;
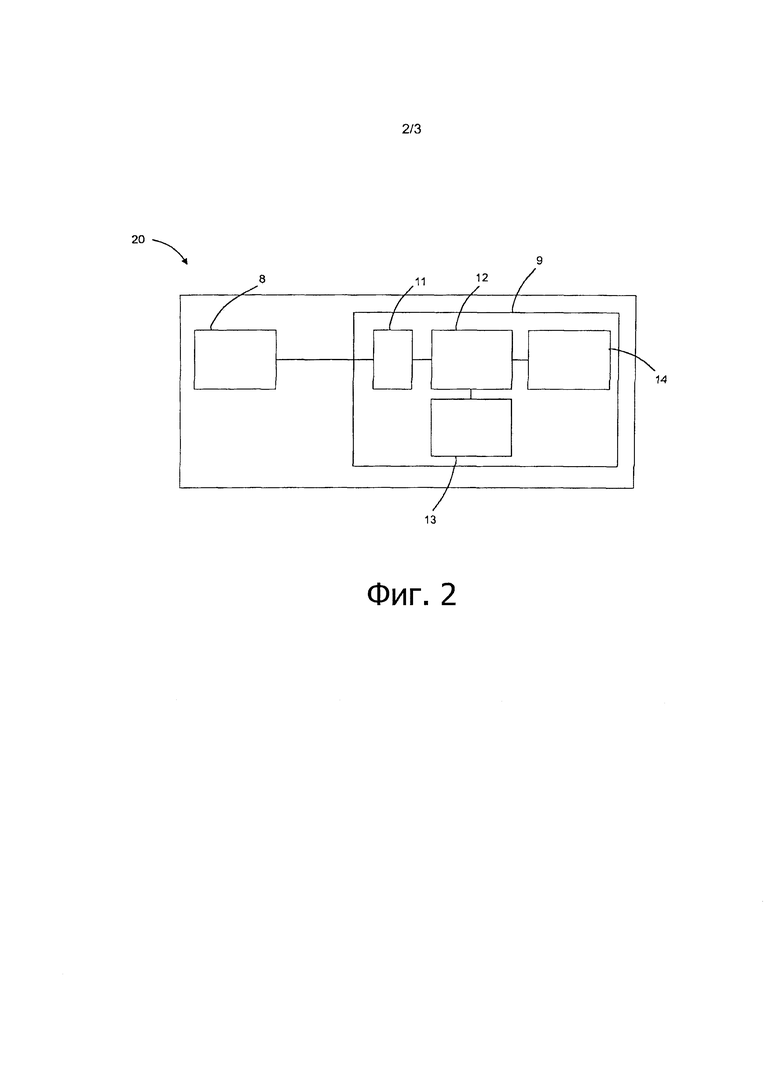
фиг.2 - схематичное изображение контрольного блока;
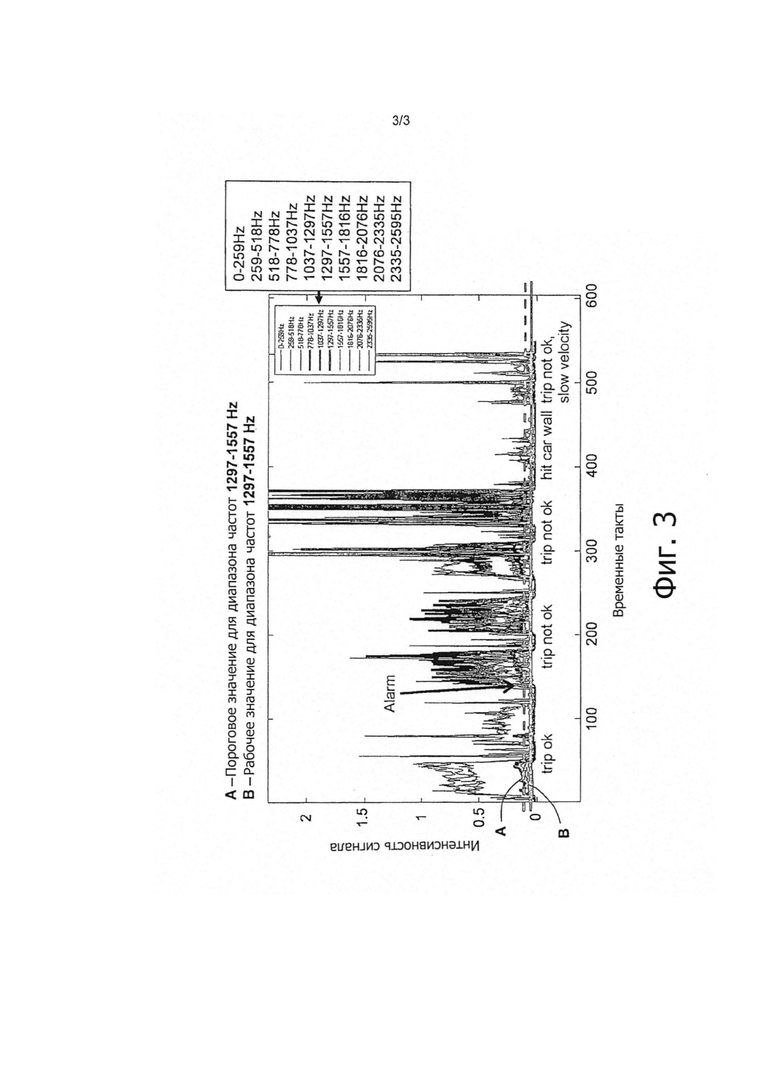
фиг.3 - спектральный анализ зарегистрированных датчиком вибраций.
Фиг.1 демонстрирует лифт 10. Лифт имеет кабину 1, противовес 2, несущее и приводное средство 3, на котором кабина 1 и противовес 2 подвешены в соотношении 2:1, а также ведущий шкив 5.1. Ведущий шкив 5.1 соединен с не показанным на фиг.1 приводным блоком и находится в рабочем контакте с несущим и приводным средством 3.
Кабина 1 и противовес 2 выполнены с возможностью перемещения посредством вращательного движения ведущего шкива 5.1, который передает приводной момент приводного блока на несущее и приводное средство 3, в основном, вдоль перпендикулярно ориентированных направляющих рельсов. Из соображений наглядности направляющие рельсы на фиг.1 не изображены. Кабина 1 и противовес 2 проводятся по направляющим рельсам посредством направляющих элементов, к примеру направляющего башмака или направляющих роликов.
Противовес 2 подвешен при этом на первой петле несущего и приводного средства 3. Первая петля образована частью несущего и приводного средства 3, располагающейся между первым концом 3.2 несущего и приводного средства и направляющим роликом 5.2. Противовес 2 посредством опоры 4.1. подвешен на первой петле. Для этого противовес 2 соединен с опорой 4.1. В представленном примере опора 4.1 представляет собой центр вращения несущего ролика 4 противовеса. При этом несущее и/или приводное средство 3 проходит от первой неподвижной точки, в которой закреплен первый конец 3.2 несущего и/или приводного средства, вниз к несущему ролику 4 противовеса. Несущее и/или приводное средство 3 обхватывает несущий ролик 4 противовеса примерно на 180° и проходит затем вверх до первого направляющего ролика 5.2.
Кабина 1 подвешена на второй петле несущего и/или приводного средства 3. Вторая петля образована частью несущего и/или приводного средства, располагающейся между вторым концом 3.1 несущего и/или приводного средства 3 и вторым ведущим шкивом 5.1. Кабина 1 посредством двух несущих роликов 7.1, 7.2 кабины подвешена на второй петле. При этом несущее и/или приводное средство 3 проходит от второй неподвижной точки, в которой закреплен второй конец 3.1 несущего и/или приводного средства, вниз к первому несущему ролику 7.1 кабины. Несущее и/или приводное средство 3 обхватывает первый несущий ролик 7.1 кабины примерно на 90°, проходит затем, в основном, горизонтально ко второму несущему ролику 7.1 кабины и обхватывает второй несущий ролик 7.2 кабины примерно на 90°. Далее несущее и/или приводное средство 3 проходит вверх к ведущему шкиву 5.1. От ведущего шкива 5.1 несущее и/или приводное средство 3 проходит, наконец, к первому направляющему ролику 5.2.
Обе неподвижные точки, в которых закреплены первый 3.2 и второй 3.1 концы, несущего и/или приводного средства 3, направляющий ролик 5.2, ведущий шкив 5.1, а также направляющие рельсы кабины 1 и противовеса 2 опосредованным образом или непосредственно подсоединены к несущей структуре, обычно к стенкам шахты.
Первый конец 3.2 несущего и/или приводного средства 3 соединен с датчиком 8. Датчик 8 регистрирует волны корпусных шумов, которые передает на него несущее и/или приводное средство 3.
В альтернативном варианте осуществления датчик 8 подсоединен к направляющему рельсу противовеса 2. При этом датчик 8 регистрирует волны корпусных шумов, которые направляющий рельс передает на датчик 8.
Волны корпусных шумов возникают при работе лифта 10, вследствие вибраций подвижных компонентов лифта. Вибрации возникают, к примеру, вследствие наличия зазора между направляющими элементами кабины 1 или направляющими элементами противовеса 2 и соответствующими направляющими рельсами, вследствие наличия приводного блока, вследствие наличия зазора в опорах направляющего ролика 5.2, ведущего шкива 5.1, несущих роликов 7.1, 7.2 кабины и несущих роликов 4 противовеса, а также вследствие наличия вибраций самого несущего и приводного средства 3.
К тому же, вибрации могут создаваться также за счет движения дверей кабины и дверей шахты, приводного механизма дверей и проч. Вибрации возникают также в опоре 4.1, на которой подвешен противовес 2, а также на направляющих элементах, по которым противовес 2 проводится по направляющим рельсам.
Все вышеуказанные компоненты лифта и другие, не названные подвижные компоненты лифта в процессе бесперебойной работы создают вибрации, которые укладываются в характеристический спектр частот и амплитуд. Со временем эти компоненты лифта подвергаются износу, который проявляется в изменении спектра частот и амплитуд.
Позиционирование датчика 8 в зоне лифта 10 не ограничено представленным в примере расположением его на первом конце 3.2 несущего и/или приводного средства 3 и регистрацией волн корпусных шумов. При позиционировании датчика 8, а также выборе типа регистрации вибраций, а именно посредством звуковых волн или волн корпусных шумов, специалистом принимается в расчет контролируемый компонент лифта и конструкция лифта 10, в частности контрольного блока.
Датчик 8, который рассчитан на то, чтобы регистрировать волны корпусных шумов, может быть позиционирован, к примеру, на втором конце 3.1 несущего и/или приводного средства 3. Таким образом, волны корпусных шумов, которые со стороны кабины передаются посредством несущего и/или приводного средства 3, могут быть зарегистрированы. Так, несущие ролики 7.1, 7.2 кабины 1 или другие компоненты лифта, расположенные на кабине 1, выполнены с возможностью контроля.
Датчик для контроля мотора или других приводных элементов, таких как приводной механизм или ведущий шкив 5.1, может быть позиционирован далее на корпусе мотора для регистрации вибраций, создаваемых контролируемыми компонентами лифта.
Волны корпусных шумов и в зоне кабины 1 могут быть зарегистрированы, к примеру, посредством датчиков, закрепленных на панели двери кабины, на корпусе привода двери, на панели стенки кабины или на днище кабины. Таким образом, вибрации подвижных компонентов лифта, таких как двери кабины, несущие ролики 7.1, 7.2 кабины, направляющие элементы кабины 1 или привод дверей, могут быть измерены.
Наконец, подвижные элементы дверей шахты создают вибрации, которые, к примеру, могут быть измерены в виде волн корпусных шумов на панелях дверей шахты. Для регистрации таких волн корпусных шумов датчик может располагаться в предпочтительном варианте на панели двери.
Следующая группа датчиков относится к датчикам, которые регистрируют звуковые волны. Такие датчики измеряют вибрации компонентов лифта, которые могут быть зарегистрированы в виде волн сжатого воздуха. Расположение этих датчиков возможно во всей зоне пространства шахты, везде, где вибрации компонентов лифта могут быть зарегистрированы в виде звуковых волн.
Датчик 8 регистрирует в предпочтительном варианте звуковые волны или волны корпусных шумов в частотном спектре от 0 до 60000 Гц, в частности от 0 до 2500 Гц.
Фиг.2 демонстрирует контрольный блок 20, который включает в себя, по меньшей мере, один датчик 8 и схему 9 обработки сигналов. Датчик 8 трансформирует зарегистрированные звуковые волны или волны корпусных шумов в сигнал и передает этот сигнал по участку передачи сигналов, как правило, по сигнальному проводу или по беспроводному соединению, на схему 9 обработки сигналов. Данная схема 9 обработки сигналов предусмотрена для анализа зарегистрированных звуковых волн или волн корпусных шумов.
Схема 9 обработки сигналов имеет, по меньшей мере, один аналоговый/цифровой преобразователь 14, процессор 11, запоминающее устройство 12 и блок 13 временных данных. Идущие от датчика 8 аналоговые сигналы при этом сначала посредством аналогового/цифрового преобразователя 14 преобразуются в цифровой сигнал. Этот цифровой сигнал передается на процессор 11 и посредством данного процессора подвергается спектральному анализу, в частности анализируются частоты и амплитуды переданных звуковых волн или волн корпусных шумов. Процессор 11 определяет диапазоны частот и устанавливает для каждого такого диапазона частот измеренную интенсивность сигнала. Под диапазоном частот в данном случае понимается частотный спектр, в частности частотный спектр от 1297 до 1557 Гц (см. фиг.3). Интенсивность сигнала представляет собой значение, которое зависит от амплитуды измеренных частот в этом диапазоне частот.
Процессор 11 устанавливает для каждого определенного диапазона частот измеренную интенсивность сигнала и производит сравнение этой интенсивности сигнала в диапазонах частот с сохраненной для соответствующего диапазона частот в запоминающем устройстве 12 первой интенсивностью сигнала или с сохраненной для соответствующего диапазона частот в запоминающем устройстве 12 второй интенсивностью сигнала, которая выше первой интенсивности сигнала. Значение первой интенсивности сигнала соответствует рабочему значению, а значение второй интенсивности сигнала соответствует пороговому значению.
Процессор 11 считает количество временных тактов, в течение которых интенсивность сигнала в процессе работы лифта достигает рабочего значения или превышает его, а также количество временных тактов, в течение которых интенсивность сигнала в процессе работы лифта достигает порогового значения или превышает его. Необходимые для этого данные по временным тактам передаются с блока 13 временных данных на процессор 11.
В результате в процессоре 11 в ходе дальнейшего анализа определяется соотношение временных тактов с пороговым значением и временных тактов с рабочим значением. Это соотношение представляет собой качественный показатель вибраций. Если этот качественный показатель превышает определенное критическое значение качественного показателя, то запускается сигнал изменения состояния. Случайные помехи, которые имеют место лишь на небольшом временном интервале или на небольшом временном такте, таким образом, отфильтровываются.
Фиг.3 демонстрирует примерный вариант анализа вибраций. Измеренные частоты разделены здесь на десять диапазонов частот от 0 до 2595 Гц. Для каждого из этих диапазонов частот интенсивность сигнала графически представлена во времени или во временном такте. На фиг.2 видно, что для диапазона частот от 1297 до 1557 Гц задано рабочее значение. На основании этого рабочего значения рассчитано пороговое значение, которое в данном случае, к примеру, на 100% выше рабочего значения. В предпочтительном варианте пороговое значение может быть установлено, по меньшей мере, на 10% выше рабочего значения.
Между временными тактами 130 и 200, 200 и 250, 270 и 310, 315 и 380, 400 и 440, а также 480 и 540 интенсивность сигнала превышает допустимое пороговое значение для упомянутого диапазона частот. В дополнительном анализе качественного показателя критический качественный показатель трижды («trip not ok») превышается. В этих трех случаях запускается сигнал изменения состояния. Однократно интенсивность сигнала превышает пороговое значение. Так как при этом рассчитанное значение качественного показателя оказывается ниже заданного критического значения качественного показателя, сигнал изменения состояния не запускается. Превышение порогового значения следует объяснить единичным кратковременным событием, а именно биением о боковую стенку кабины («hit car wall»). Это кратковременное событие отфильтровывается посредством дополнительного анализа качественного показателя.
Критическое значение качественного показателя установлено в данном случае, к примеру, в 10%. Это означает, что на 100 временных тактов с измеренной интенсивностью сигнала, превышающей рабочее значение, приходится 10 временных тактов с измеренной интенсивностью сигнала, превышающей пороговое значение. В соответствии с этим, в описанном ранее анализе качественный показатель троекратно превышает критическое значение качественного показателя, которое составляет 10% и однократно значение качественного показателя, несмотря на превышение порогового значения, оказывается ниже критического значения качественного показателя, которое составляет 10%.
Критическое значение качественного показателя в предпочтительном варианте может быть установлено, по меньшей мере, в 10%. В других предпочтительных вариантах осуществления критическое значение качественного показателя может быть установлено также, по меньшей мере, в 20, 30, 40 или 50%. Критическое значение качественного показателя в предпочтительном варианте закладывается в память запоминающего устройства 12 схемы 9 обработки сигналов.
В предпочтительном варианте рабочее значение определяется посредством пробного хода. Во время этого пробного хода датчик 8 измеряет возникающие вибрации. В схеме 9 обработки сигналов и, соответственно, в процессоре 11, на основании этого определяется характеристическая интенсивность сигнала для каждого диапазона частоты, к примеру максимальная интенсивность сигнала или средняя интенсивность сигнала. Эта интенсивность сигнала сохраняется затем в запоминающем устройстве 12 схемы 9 обработки сигналов в качестве рабочего значения. Пороговое значение может быть рассчитано в предпочтительном варианте на основании рабочего значения и представляет собой повышенную на определенный процент характеристическую интенсивность сигнала. Это пороговое значение может быть рассчитано в процессоре 11.
Дальнейший анализ вибраций относится к автотесту датчика 8 и, соответственно, участка передачи сигналов. Схема 9 обработки сигналов и, соответственно, процессор 11 считает для этого временные такты, в течение которых интенсивность сигнала не достигает рабочего значения. Эти временные такты представляют собой временной промежуток, в который лифт 10 не работает. Процессор 11 проверяет, превышает ли этот временной интервал известное временное значение. Для этого процессор 11 сравнивает временной интервал с сохраненным в устройстве управления временным значением. Если процессор 11 устанавливает превышение этого временного значения, то предполагается сбой в работе датчика. Это временное значение рассчитывается на основании характеристического профиля использования лифта 10 и представляет собой временной интервал, в течение которого лифт 10 мог бы использоваться с очень высокой степенью вероятности. При превышении этого временного значения также запускается сигнал изменения состояния.
Запуск сигнала изменения состояния означает, по меньшей мере, то, что в лифте 10 должны быть произведены работы по техническому обслуживанию, в рамках которых устраняются неполадки в работе лифта 10. К примеру, сигнал подается в центральную сервисную службу, которая имеет специалиста по техническому обслуживанию соответствующего лифта 10. В альтернативном варианте при запуске сигнала изменения состояния специалист по техническому обслуживанию непосредственно через находящуюся в соединении с лифтом систему приема мобильной радиосвязи ставится в известность о необходимости произведения работ по техническому обслуживанию соответствующего лифта 10.
Из соображений безопасности при запуске сигнала изменения состояния лифт также может быть остановлен. В этом случае также необходим специалист по техническому обслуживанию для произведения работ и повторного запуска лифта 10.
Регистрация вибраций посредством датчика 8 и анализ этих данных на схеме 9 обработки сигналов в соответствии с вышеуказанными мероприятиями не ограничивается представленными конфигурациями лифта 10. Так, контроль вибраций подвижных компонентов лифта относится также к лифтам с соотношениями системы подвески 1:1, 3:1 и т.д., к лифтам без противовеса, к лифтам с машинным отделением или, в целом, к лифтам, подвижные компоненты которых вызывают вибрацию.
В отличие от представленного примера с фиг.1, можно также одновременно в различных местах лифта позиционировать несколько датчиков, которые имеют общую схему обработки сигналов, группами соединены с одной схемой обработки сигналов или же имеют собственные схемы обработки сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЗАЩИТЫ ЛИФТА ОТ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2491224C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ И ОБРАБОТКИ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2487074C2 |
| СПОСОБ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ АВАРИЙНЫМ ТОРМОЖЕНИЕМ ДЛЯ ПРИВОДНОЙ СИСТЕМЫ | 2018 |
|
RU2771711C2 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2618862C2 |
| КАНАТНЫЙ ЛИФТ С РАБОЧИМ ШКИВОМ | 1998 |
|
RU2246440C2 |
| Способ диагностики технического состояния агрегата авиационного привода | 2017 |
|
RU2667830C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЛИФТОМ | 2010 |
|
RU2499759C2 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЛИФТОВОЙ УСТАНОВКИ И ЛИФТОВАЯ УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2534830C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ КАБИНЫ ЛИФТА | 2013 |
|
RU2588327C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ЛИФТА В АВАРИЙНОМ РЕЖИМЕ | 2008 |
|
RU2484003C2 |
Изобретение относится к лифту (10) с датчиком (8), посредством которого могут быть зарегистрированы вибрации, образующиеся в процессе работы лифта (10), и со схемой (9) обработки сигналов, которая соединена с датчиком (8) и посредством которой зарегистрированные посредством датчика вибрации могут быть подвергнуты анализу. При этом посредством схемы (9) обработки сигналов зарегистрированные вибрации могут сравниваться с задаваемым рабочим значением и с задаваемым пороговым значением. При превышении критического значения качественного показателя может быть запущен сигнал изменения состояния. Изобретение относится также к способу эксплуатации этого лифта (10). Достигается создание более надежного контрольного блока для осуществления контроля за компонентами лифта. 2 н. и 10 з.п. ф-лы, 3 ил.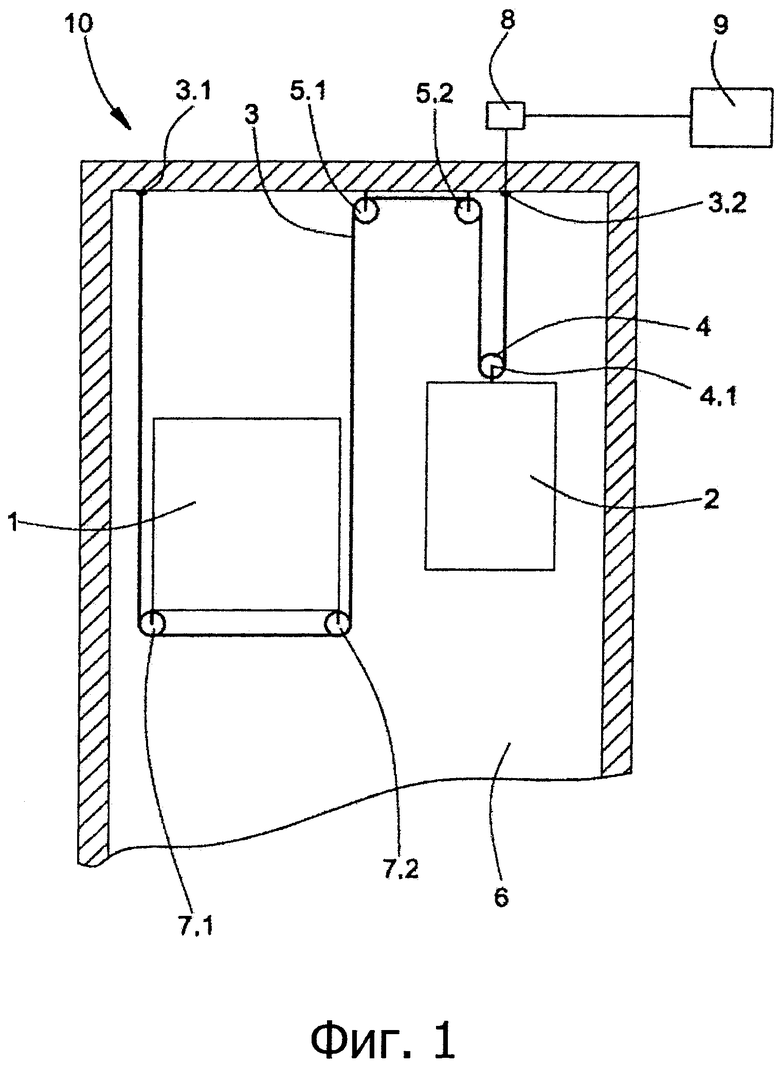
1. Лифт (10) с
- датчиком (8), выполненным с возможностью регистрации вибраций, образующихся в процессе работы лифта (10), и
- схемой (9) обработки сигналов, соединенной с датчиком (8) и выполненной с возможностью зарегистрированные датчиком вибрации подвергать анализу,
отличающийся тем, что схема (9) обработки сигналов выполнена с возможностью сравнения зарегистрированных вибраций с задаваемым рабочим значением и с задаваемым пороговым значением, причем схема (9) обработки сигналов выполнена с возможностью расчета качественного показателя на основании сравнения вибраций с рабочим значением и сравнения вибраций с пороговым значением, при этом качественный показатель рассчитывается из соотношения между временным интервалом, в течение которого достигается или превышается пороговое значение, и временным интервалом, в течение которого достигается или превышается рабочее значение.
2. Лифт (10) по п. 1, отличающийся тем, что при превышении критического значения качественного показателя может быть запущен сигнал изменения состояния.
3. Лифт (10) по п.п. 1 или 2, отличающийся тем, что при значениях ниже рабочего значения во время задаваемого временного интервала может быть запущен сигнал изменения состояния.
4. Лифт (10) по п. 3, отличающийся тем, что временной интервал составляет, по меньшей мере, один час.
5. Лифт (10) по любому из п.п. 1, 2, 4, отличающийся тем, что рабочее значение может быть установлено посредством пробного хода лифта (10).
6. Лифт (10) по п. 3, отличающийся тем, что рабочее значение может быть установлено посредством пробного хода лифта (10).
7. Способ эксплуатации лифта (10) с
- датчиком (8) и
- схемой (9) обработки сигналов, соединенной с датчиком (8),
причем посредством датчика (8) регистрируют вибрации, производимые в процессе работы лифта (10), а посредством схемы (9) обработки сигналов производят анализ зарегистрированных посредством датчика вибраций,
отличающийся тем, что посредством схемы (9) обработки сигналов сравнивают зарегистрированные вибрации с задаваемым рабочим значением и с задаваемым пороговым значением, причем посредством схемы (9) обработки сигналов на основании сравнения вибраций с рабочим значением и сравнения вибраций с пороговым значением рассчитывают качественный показатель, при этом качественный показатель образуется из соотношения между временным интервалом, в течение которого достигается или превышается пороговое значение, и временным интервалом, в течение которого достигается или превышается рабочее значение.
8. Способ по п. 7, отличающийся тем, что при превышении критического значения качественного показателя запускают сигнал изменения состояния.
9. Способ по п. 7 или 8, отличающийся тем, что при значениях ниже рабочего значения во время задаваемого временного интервала запускают сигнал изменения состояния.
10. Способ по п. 9, отличающийся тем, что задают временной интервал по меньшей мере в один час.
11. Способ по любому из п.п. 7, 8, 10, отличающийся тем, что рабочее значение устанавливают посредством пробного хода лифта (10).
12. Способ по п. 9, отличающийся тем, что рабочее значение устанавливают посредством пробного хода лифта (10).
| JP 2005247468 A, 15.09.2005 | |||
| US 2011168496 A1, 14.07.2011 | |||
| Преобразователь постоянного напряжения | 1980 |
|
SU1059645A1 |

