УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение в общем относится к электронной системе защиты лифта от превышения ускорения и превышения скорости.
Лифты содержат систему ловителя для обеспечения остановки лифта и предотвращения его перемещения с превышением скорости в ответ на поломку компонента лифта или иную неисправность, приводящую к неработоспособности лифта. Традиционно система лифтового ловителя содержит механическое устройство с датчиком скорости, обычно называемое ограничителем скорости, и ловители или зажимные приспособления, прикрепленные к раме кабины лифта и выполнены для выборочного захвата направляющих рельсов лифта. Если происходит разрыв подъемных тросов или сбой других рабочих компонентов лифта, что вызывает перемещение кабины лифта с превышением скорости, то ограничитель скорости приводит в действие ловители для замедления или остановки кабины.
Ловители содержат тормозные накладки, установленные для перемещения с тросом ограничителя скорости, и тормозные корпуса, установленные с для перемещения с кабиной лифта. Тормозные корпуса выполнены в форме клиньев, так что когда тормозные накладки перемещаются в направлении, противоположном направлению перемещения тормозных корпусов, тормозные накладки приводятся в фрикционный контакт с направляющими рельсами. В результате тормозные накладки оказываются вклиненными между направляющими рельсами и тормозным корпусом, так что нет кабина лифта и направляющие рельсами не перемещаются относительно друг друга. Для приведения системы ловителя в исходное состояние тормозной корпус (т.е. кабина лифта) должен быть перемещен вверх при одновременном разблокировании троса ограничителя скорости.
Один недостаток обычной системы ловителя состоит в том, что установка ограничителя скорости, в том числе шкива ограничителя скорости, натяжного шкива и троса ограничителя скорости, занимает очень много времени. Еще один недостаток состоит в том, что для эффективной работы указанной системы необходимо значительное количество компонентов. Кроме того, блок шкива ограничителя скорости, трос ограничителя скорости и блок натяжного шкива являются дорогостоящими, а для их расположения в подъемном отделении лифта, приямке и машинном отделении необходимо значительное пространство. Кроме того, во время работы трос ограничителя скорости и блоки шкивов производят много шума, что нежелательно. Кроме того, из-за большого количества компонентов и движущихся частей увеличены затраты на техническое обслуживание. Кроме того, установка в исходное состояние вручную ограничителя скорости и ловителей является неудобной, дорогостоящей и требующей длительного времени. При использовании современных высокоскоростных лифтов эти недостатки оказывают еще большее влияние.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Система лифтового ловителя содержит датчик скорости, датчик ускорения, механический ловитель, электромагнитный пусковой механизм и контроллер. Датчик скорости выполнен с возможностью мониторинга скорости массы лифтовой системы, в том числе, например, кабины или противовеса. Датчик ускорения выполнен с возможностью мониторинга ускорения указанной массы. Ловитель соединен с указанной массой, и указанный электромагнитный пусковой механизм соединен с ловителем. Контроллер выполнен с возможностью разблокирования пускового механизма для взаимодействия с ловителем, когда датчик скорости подает сигнал о состоянии превышения скорости или когда датчик ускорения подает сигнал о состоянии превышения ускорения. Кроме того, контроллер выполнен с возможностью автоматического приведения пускового механизма в исходное состояние.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
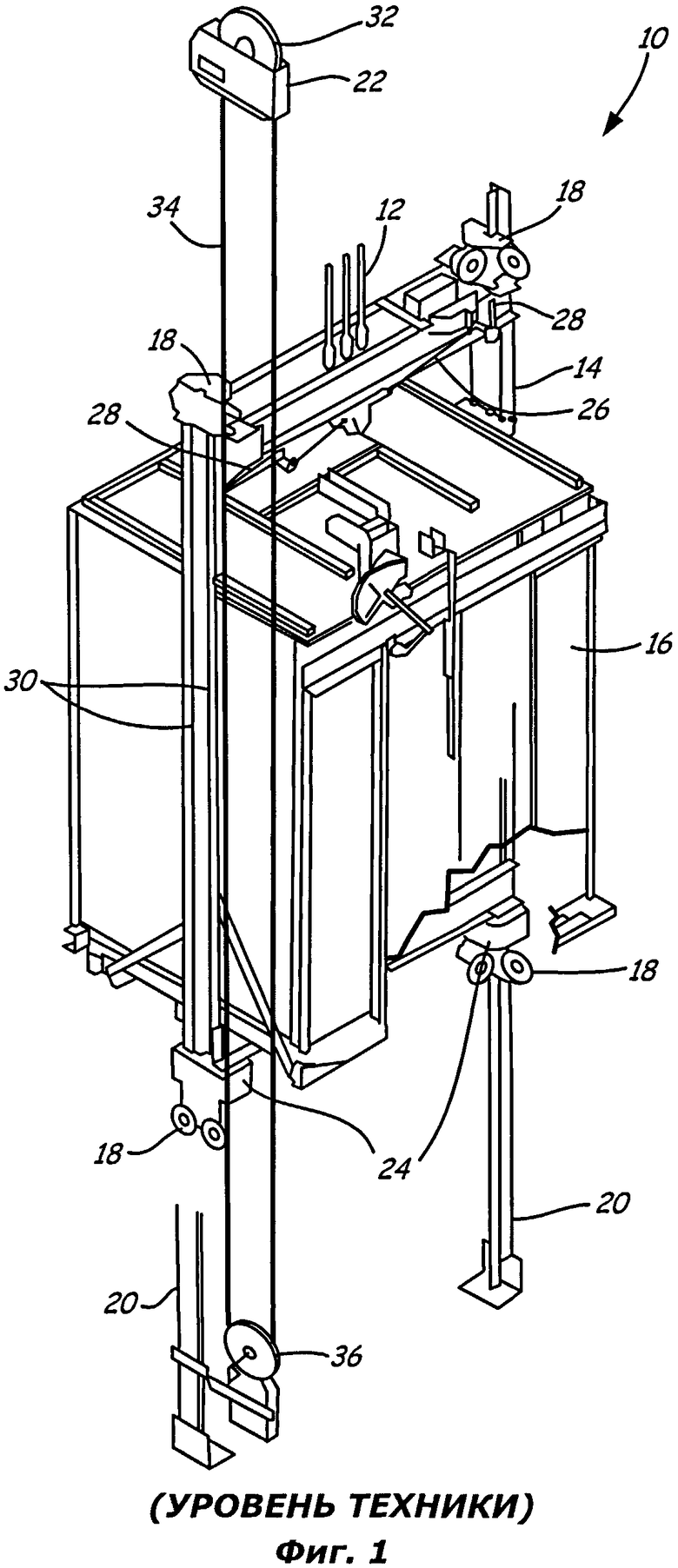
На фиг.1 показана известная лифтовая система, в которой использован механический ограничитель скорости.
На фиг.1, в соответствии с одним вариантом реализации настоящего изобретения, схематически показана лифтовая система, включающая электронную систему защиты лифта от превышения скорости и превышения ускорения.
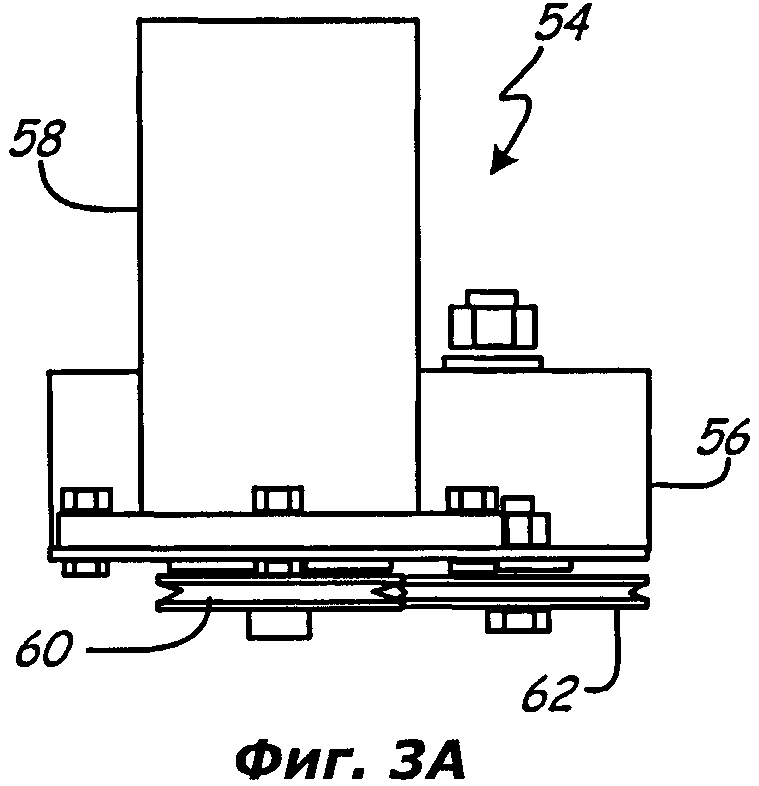
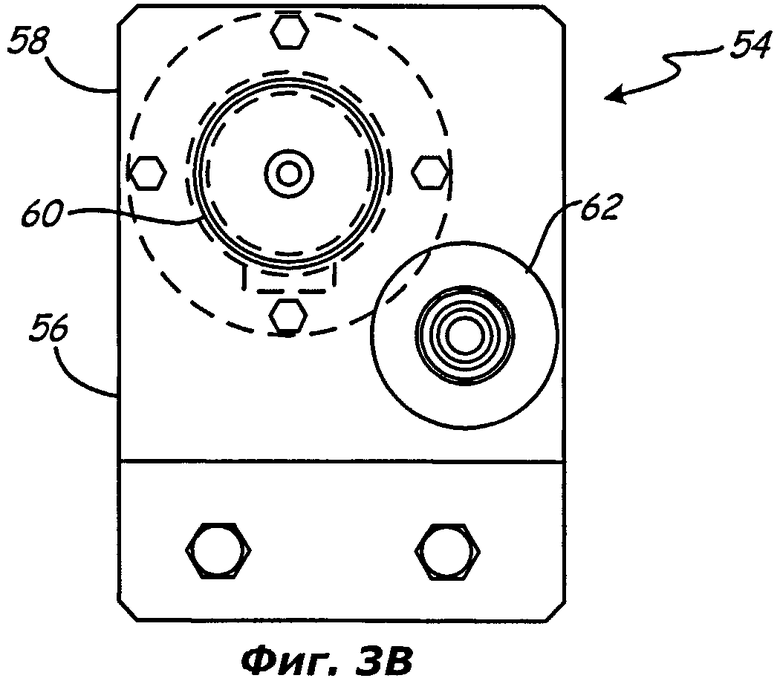
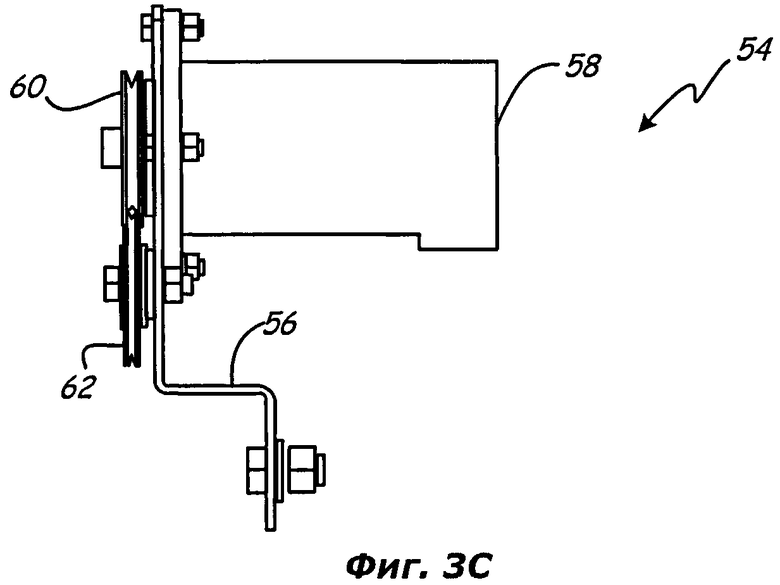
На фиг.3А - 3С показан тахометр для указанной электронной системы защиты лифта от превышения скорости и превышения ускорения, показанной на фиг.2.
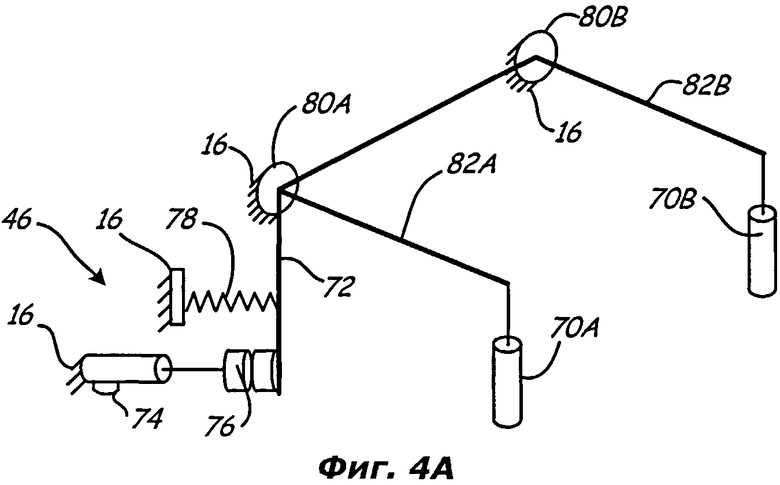
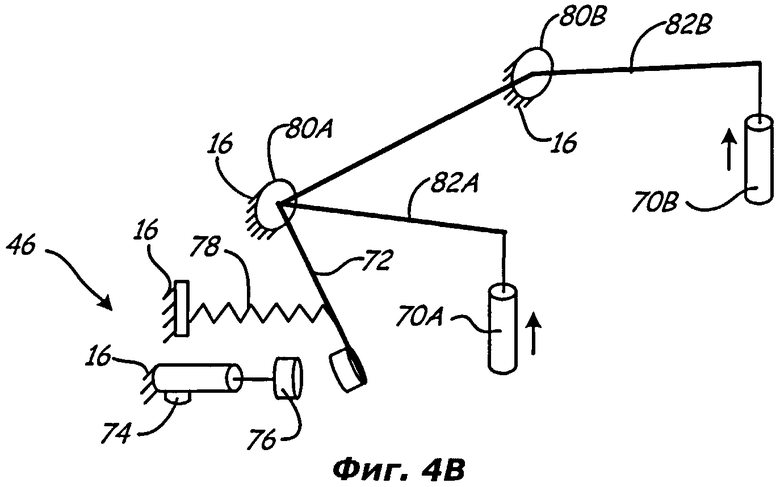
На фиг.4А и 4В схематически показан электромагнитный спусковой механизм ловителя, который использован в лифтовой системе.
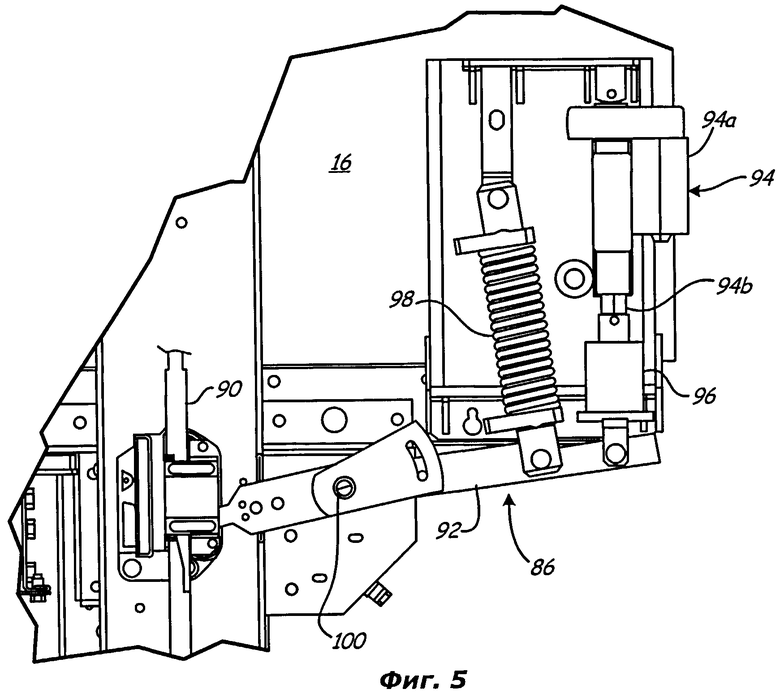
На фиг.5, в соответствии с одним вариантом реализации, показан горизонтальный разрез электромагнитного пускового механизма ловителя, который установлен на кабине лифта.
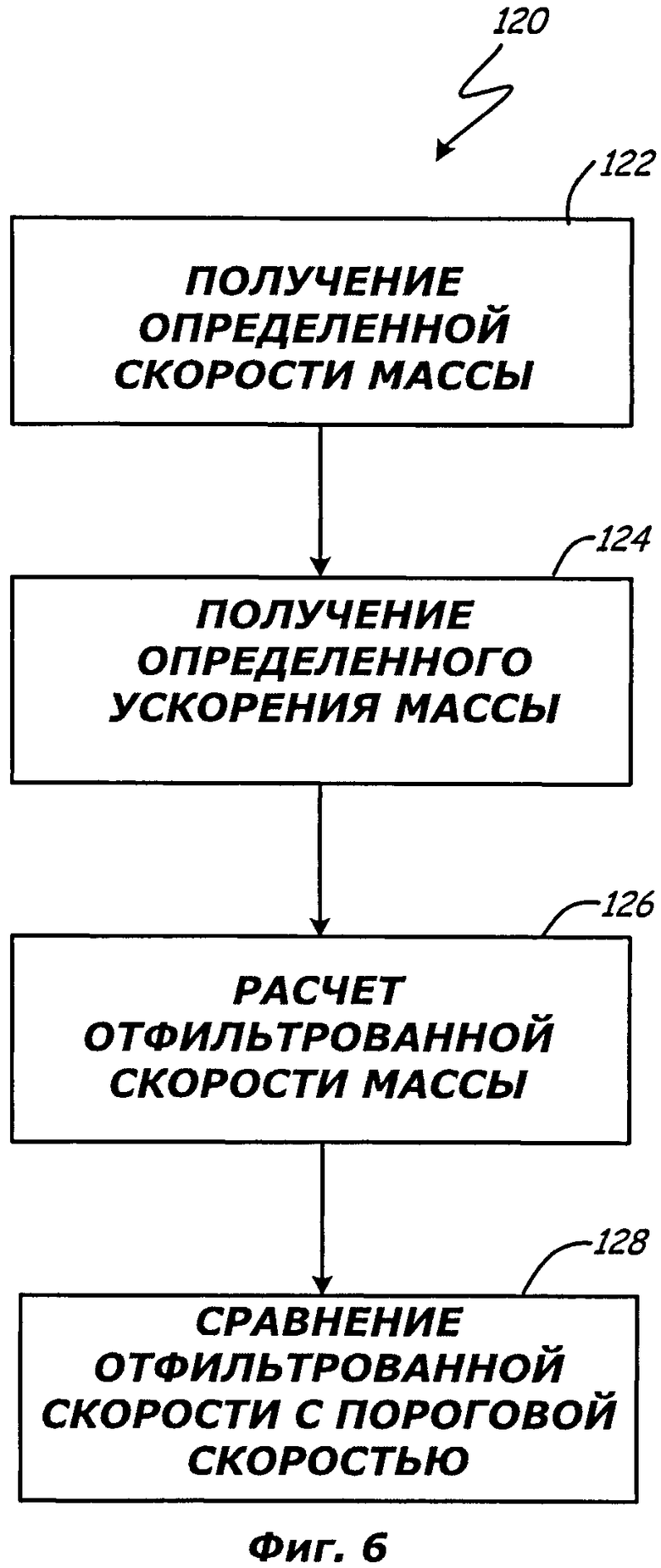
На фиг.6 в соответствии с одним вариантом реализации показана блок-схема способа обнаружения и обработки состояний превышения ускорения и превышения скорости массы лифтовой системы.
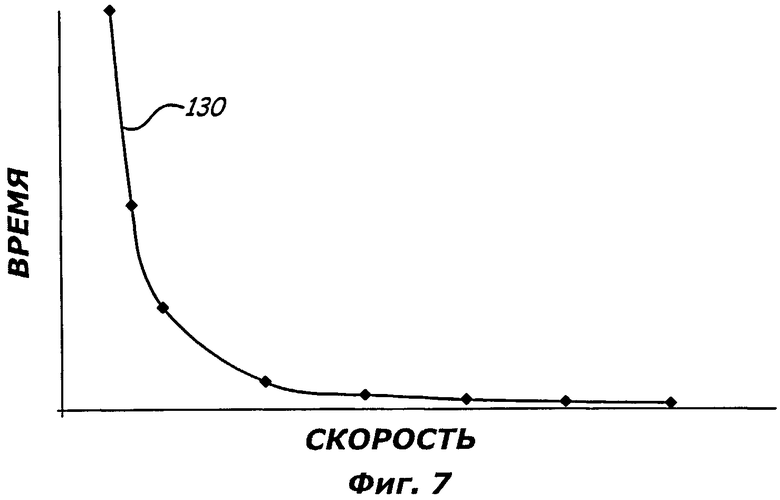
На фиг.7 показан график периода времени превышения скорости, построенный как функция разности отфильтрованной скорости лифтовой массы и пороговой скорости, которая первоначально подает сигнал о состоянии превышения скорости.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ РЕАЛИЗАЦИИ ИЗОБРЕТЕНИЯ
На фиг.1 показана известная лифтовая система 10, которая содержит кабели 12, раму 14 кабины, кабину 16, роликовые направляющие 18, направляющие рельсы 20, ограничитель 22 скорости, ловители 24, соединительные устройства 26, рычаги 28 и подъемные стержни 30. Ограничитель 22 скорости содержит шкив 32, замкнутый контур 34 троса и натяжной шкив 36. Кабели 12 соединены с рамой 14 кабины и противовесом (не показан на фиг.1) в подъемном отделении лифта. Кабина 16, которая прикреплена к раме 14 кабины, выполнена с возможностью перемещения вверх и вниз в подъемном отделении посредством силы, переданной через кабели 12 к раме 14 кабины посредством привода лифта (не показан), который обычно расположен в машинном отделении в верхней части подъемного отделения. Роликовые направляющие 18 прикреплены к раме 14 кабины и выполнены с возможностью направления рамы 14 кабины и кабины 16 вверх и вниз в подъемном отделении вдоль направляющих рельсов 20. Шкив 32 ограничителя скорости установлен в верхней части подъемного отделения лифта. Замкнутый контур 34 троса частично намотан вокруг шкива 32 ограничителя скорости и частично вокруг натяжного шкива 36 (который в соответствии с этим вариантом реализации размещен в нижней части подъемного отделения лифта). Кроме того, замкнутый контур 34 троса соединен с кабиной 16 лифта вблизи рычага 28, и благодаря чему обеспечено то, что угловая скорость шкива 32 ограничителя скорости напрямую связана со скоростью кабины 16 лифта.
Как показано на фиг.1, в лифтовой системе 10 ограничитель 22 скорости, электромеханический тормоз (не показан), расположенный в машинном отделении, и ловители 24 выполнены с возможностью остановки кабины 16 лифта, если кабина 16 превышает заданную скорость в процессе ее перемещения в подъемном отделении. Если кабина 16 достигает состояния превышения скорости, то сначала приводится в работу ограничитель 22 для взаимодействия с выключателем, который в свою очередь отключает питание приводного механизма лифта и включает тормоз для прекращения перемещения приводного шкива и тем самым для остановки перемещения кабины 16. Однако в случае разрыва кабелей 12 или в случае нахождения кабины 16 в состоянии свободного падения, на которое не оказывает влияния указанный тормоз, ограничитель 22 выполнен с возможностью приведения в действие ловителей 24 для задерживания перемещения кабины 16. Ограничитель 22, кроме того, что он выполнен с возможностью взаимодействия с выключателем для приведения в действие тормоза, он выполнен с возможностью разблокирования сцепляющего устройства, зажимающего трос 34 ограничителя скорости. Трос 34 ограничителя скорости соединен с ловителями 24 через соединительные устройства 26, рычаги 28 и подъемные стержни 30. По мере того, как кабина 16 продолжает спуск и при этом тормоз на нее не действует, трос 34 ограничителя скорости, перемещение которого теперь предотвращено посредством приведенного в действие ограничителя 22, тянет рычаг 28 управления. Рычаг 28 управления выполнен с возможностью настройки ловителей 24 посредством перемещения соединительных устройств 26, соединенных с подъемными стержнями 30, приводящими к взаимодействию ловителей 24 с направляющими рельсами 20 для остановки кабины 16.
Как описано выше, известные системы лифтового ловителя, содержащие механические ограничители скорости, имеют недостатки. В соответствии с вариантами реализации настоящего изобретения, предложена электронная система, выполненная с возможностью приведения в действие тормоза машинного отделения и с возможностью разблокирования электромагнитного пускового механизма ловителя с низким гистерезисом и с минимальными требованиями по электропитанию, для взаимодействия с указанными ловителями, когда обнаружены определенные состояния превышения скорости и/или превышения ускорения кабины лифта. Электромагнитный пусковой механизм выполнен с возможностью автоматического приведения в исходное состояние и с возможностью разблокирования для взаимодействия с указанными ловителями в процессе процедуры приведения в исходное состояние. Система обнаружения и обработки состояний превышения скорости и/или превышения ускорения выполнена с возможностью уменьшения времени отклика и уменьшения случаев ложных сигналов пуска, вызванных состояниями, не связанными с безопасностью пассажиров, такими например, когда пассажиры подпрыгивают в кабине лифта.
Система защиты лифта от превышения ускорения и превышения чрезмерной скорости
На фиг.2, в соответствии с одним вариантом реализации, схематически показана лифтовая система 40, содержащая кабину 16, датчик 42 скорости, датчик 44 ускорения, электромагнитный пусковой механизм 46 ловителя и контроллер 48. Датчик 42 скорости представляет собой электромеханическое устройство, выполненное с возможностью измерения скорости кабины 16 в процессе ее перемещения в подъемном отделении лифта во время работы лифтовой системы 40 и с возможностью его электронного взаимодействия с контроллером 48. Например, датчик 42 скорости может быть тахометром, иначе называемым генератором. По существу, тахометр представляет собой устройство, измеряющее скорость вращающегося компонента, например, в оборотах в минуту (об/мин). В соответствии с вариантами реализации настоящего изобретения, указанный тахометр выполнен с возможностью электронного измерения механического вращения или с возможностью преобразования механических измерений в электронные сигналы для их расшифровки посредством контроллера 48.
Датчик 44 ускорения может быть электронным устройством, выполненным с возможностью измерения ускорения кабины 16. Датчик 44 ускорения может быть, например, акселерометром. Акселерометр, который может быть использован, может представлять собой микроэлектромеханическую систему (MEMS), которая обычно содержит консольную планку с пробной массой (иначе называемой сейсмической массой). Под влиянием ускорения указанная пробная масса отклоняется от ее нейтрального положения. Отклонение указанной пробной массы может быть измерено аналоговым или цифровым способом. Например, может быть измерено изменение емкостного сопротивления между неподвижными планками и планками, прикрепленными к указанной пробной массе.
Контроллер 48 может быть, например, монтажной схемой, содержащей микропроцессор 48А, интерфейс 48В ввода-вывода данных, индикаторы 48С (которые могут быть, например, светодиодами) и выключатель 48D цепи ловителя. Контроллер 48 запитан от источника 50 питания с аварийным батарейным питанием 52.
Как показано на фиг.2, датчик 42 скорости, датчик 44 ускорения, электромагнитный пусковой механизм 46 ловителя и контроллер 48 соединены с кабиной 16. Как показано на фиг.2, датчик 42 скорости установлен в верхней части кабины 16, и датчик 44 ускорения выполнен с возможностью его установки на монтажной схеме контроллера 48. В соответствии с другими вариантами реализации, датчик 42 скорости и датчик 44 ускорения выполнены с возможностью их установки в различных местах кабины 16, которые пригодны для выполнения измерений скорости и/или ускорения. Контроллер 48 выполнен с возможностью приема и расшифровки сигналов от датчика 42 скорости и датчика 44 ускорения, и с возможностью управления электромагнитным пусковым механизмом 46 ловителя.
В соответствии с вариантами реализации, в которых датчик 42 скорости является тахометром, указанный тахометр выполнен с возможностью его прикрепления к свободновращающемуся шкиву, установленному наверху кабины 16. Свободновращающийся шкив выполнен с возможностью вращения со скоростью, соответствующей скорости кабины 16. Таким образом, указанный тахометр может быть сконфигурирован для измерения скорости кабины косвенно посредством измерения скорости вращения свободновращающегося шкива. В соответствии с еще одним вариантом реализации, в котором использован тахометр, например, в лифтовой системе с расположением тросов 1:1, которая не содержит на кабине Свободновращающийся шкив, в подъемном отделении лифта вблизи кабины 16 может быть подвешен неподвижный трос, а тахометр может быть соединен с указанным тросом. Например, на фиг.3А - 3С показан тахометр 54, который содержит монтажный держатель 56, электрический генератор 58, приводной шкив 60 и натяжной шкив 62. На фиг.3А показан вид сверху тахометра 54. На фиг.3В и 3С показаны соответственно вид спереди и вид сбоку тахометра 54. Тахометр 54 выполнен с возможностью соединения с кабиной 16 посредством монтажного держателя 56. Генератор 58, приводной шкив 60 и натяжной шкив 62 все соединены с монтажным держателем 56. Приводной шкив 60 соединен с генератором 58 с возможностью вращения. Неподвижный трос, подвешенный в подъемном отделении лифта, может проходить вверх от нижней части подъемного отделения, частично оборачиваться вокруг верхней части натяжного шкива 62, под приводным шкивом 60 и вверх к верхней части подъемного отделения. При перемещении кабины 16 вверх и вниз в подъемном отделении, воздействие неподвижного троса на тахометр 54 вызывает вращение приводного шкива 60, в свою очередь приводящего в действие генератор 58. Выходной сигнал генератора является функцией скорости, с которой генератор приведен в действие, и может быть измерен для обеспечения указания скорости кабины 16. В соответствии с еще одним вариантом реализации, тахометр выполнен с возможностью приведения в действие посредством взаимодействия со стационарными направляющими рельсами, вдоль которых кабина 16 направлена вверх и вниз в подъемном отделении.
Контроллер 48 принимает входные сигналы от датчика 42 скорости и датчика 44 ускорения и подает выходные сигналы электромагнитному пусковому механизму 46 ловителя. Кроме того, контроллер 48 содержит выключатель 48D цепи ловителя, выполненный с возможностью формирования части цепи 64 ловителя лифтовой системы 40. Цепь 64 ловителя представляет собой серию электромеханических устройств, распределенных в подъемном отделении лифта и соединенных с приводом лифта и его тормозом в машинном отделении.
Электромагнитный пусковой механизм 46 ловителя расположен на кабине 16 с возможностью его соединения с ловителями кабины, которые для ясности не показаны на фиг.2, но которые могут быть расположены и функционировать аналогично ловителям 24, описанным со ссылкой на фиг.1. На фиг.1 показаны ловители 24, расположенные по направлению к днищу кабины 16; кроме того, электромагнитный пусковой механизм 46 ловителя также может быть установлен на днище кабины 16. В соответствии с другими вариантами реализации, лифтовые системы содержат ловители и электромагнитный пусковой механизм 46 ловителя, расположенные по направлению к верхней части кабины.
Во время работы лифтовой системы 40 датчик 42 скорости и датчик 44 ускорения измеряют скорость и ускорение кабины 16, перемещаемой в подъемном отделении. Контроллер 48 принимает сигналы от датчика 42 скорости и датчика 44 ускорения и расшифровывает эту информацию для определения факта возникновения опасного состояния превышения скорости и/или превышения ускорения. Если возникло опасное состояние превышения скорости и/или превышения ускорения кабины 16, контроллер 48 сначала вызыват размыкание выключателя 48D цепи 64 ловителя лифтовой системы 40. Размыкание выключателя 48D размыкает цепь 64 ловителя и прерывает подачу питания приводу 66 лифта, который обычно расположен в машинном отделении в верхней части подъемного отделения, и приводит в действие или включает тормоз 68 на приводном шкиве привода 66 лифта. Если на движение кабины 16 не влияет включения тормоза 68 машинного отделения (например, если повреждены кабели 12, соединенные с кабиной 16), продолжают определять состояния превышения скорости и превышения ускорения и электромагнитный пусковой механизм 46 ловителя оказывается разблокированным посредством контроллера 48. Разблокирование пускового механизма 46 вызывает его взаимодействие с ловителями лифта, например, с ловителями 24, показанными на фиг.1, для замедления или остановки кабины 16. Ниже представлено более подробное описание вариантов реализации электромагнитных пусковых механизмов ловителя и систем обнаружения и обработки состояний превышения скорости и/или превышения ускорения.
Электромагнитный пусковой механизм ловителя лифта.
На фиг.4А и 4В схематически показан электромагнитный пусковой механизм 46 ловителя, который использован в лифтовой системе, содержащей ловители 70А и 70В. Пусковой механизм 46 содержит связующее звено 72, линейный исполнительный механизм 74, электромагнит 76 и пружину 78. На фиг.4А показан пусковой механизм 46 в готовом состоянии, ожидающий его разблокирования для взаимодействия с ловителями 70А, 70В. На фиг.4В показан пусковой механизм 46, разблокированный для взаимодействия с ловителями 70А, 70В. Для упрощения не все компоненты указанной лифтовой системы показаны на фиг.4А и 4В. Однако, как описано выше, указанные компоненты пускового механизма 46 и ловители 70А, 70В прикреплены в общем случае к массам лифтовой системы,, которые они предохраняют от опасных условий, например кабину или противовес. Ловители 70А, 70В могут быть аналогичными по расположению и конфигурации ловителям 24, показанным на фиг.1, или могут быть любым другим ловителем, выполненным с возможностью его приведения в механическое взаимодействия посредством пускового механизма 46 и с возможностью замедления или остановки массы лифтовой системы в опасном состоянии превышения скорости и/или превышения ускорения.
На фиг.4А и 4В связующее звено 72 кинематически соединено с ловителями 70А, 70В посредством точек 80А, 80В поворота и подъемных стержней 82А, 82В ловителя соответственно. В соответствии с другими вариантами реализации, связующее звено 72 выполнено с возможностью его соединения с ловителями 70А, 70В посредством более простых или более сложных кинематических механизмов в любом расположении, которые приводят ловители 70А, 70В к взаимодействию, когда связующее звено 72 находится в движении. Кроме того, в указанной лифтовой системе возможно использование более чем одного электромагнитного пускового механизма 46 ловителя. Например, вместо одного пускового механизма 46, взаимодействующего с ловителями 70А, 70В, как показано на фиг.4А и 4В, возможны другие варианты реализации, согласно которым лифтовая система содержит пусковой механизм 46 для каждого ловителя 70. Линейный исполнительный механизм 74 соединен с одной стороной кабины 16 лифта. Электромагнит 76 соединен с линейным исполнительным механизмом 74 и магнитно связан с связующим звеном 72. Пружина 78 выполнена с возможностью соединения связующего звена 72 и кабины 16 и расположена между указанным звеном и указанной кабиной.
Во время работы лифта электромагнитный пусковой механизм 46 ловителя выполнен с возможностью взаимодействия с ловителями 70А, 70В в случае обнаружения опасного состояния превышения скорости или превышения ускорения кабины 16. Как показано на фиг.4В, электромагнитный пусковой механизм 46 ловителя выполнен с возможностью разъединения магнитного соединения между электромагнитом 76 и связующим звеном 72 посредством приведения в действие электромагнита 76, когда возникает состояние превышения скорости или превышения ускорения. Когда электромагнит 76 приведен в действие, связующее звено 72 получает возможность движения от электромагнита 76, который высвобождает энергию, сохраненную в сжатой пружине 78, которая приводит к разжатию указанной пружины. Посредством разжатия пружины 78 связующее звено 72 перемещается для поднятия подъемных стержней 82А, 82В и, тем самым, для взаимодействия с ловителями 70А, 70В для замедления или остановки кабины 16.
После того как условие безопасности для кабины 16 выполнено, возможна автоматическая установка пускового механизма 46 в исходное состояние. Линейный исполнительный механизм 74 выполнен с возможностью удлинения для расположения электромагнита 76 для захвата связующего звена 72, т.е. с целью восстановления указанного магнитного соединения после того, как звено 72 было перемещено для взаимодействия с ловителями 70А, 70В. Линейный исполнительный механизм 74 выполнен с возможностью последующего перемещения назад электромагнита 76, который магнитно соединен со связующим звеном 72 для сжатия пружины 78 и для разъединения ловителей 70А, 70В. Пусковой механизм 46 выполнен с возможностью взаимодействия с ловителями 70А, 70В во время операции приведения в исходное состояние посредством приведения электромагнита 76 к разблокированию связующего звена 72 при одновременном перемещении назад линейного исполнительного механизма 74.
На фиг.5, в соответствии с одним вариантом реализации показан горизонтальный разрез электромагнитного пускового механизма 86 ловителя, который установлен по направлению к нижней части кабины 16 лифта вблизи подъемного стержня 90 ловителя. Пусковой механизм 86 содержит связующее звено 92, линейный исполнительный механизм 94, электромагнит 96 и цилиндрическую винтовую пружину 98. Как показано на фиг.5, один конец связующего звена 92 соединен с подъемным стержнем 90. Противоположный конец звена 92 соединен с цилиндрической винтовой пружиной 98 и магнитно соединен с электромагнитом 96. Между указанными двумя концами в точке 100 поворота звено 92 соединено с кабиной 88 с возможностью его шарнирного поворачивания. Линейный исполнительный механизм 94 соединен с электромагнитом 96. Пружина 98 соединена с кабиной 88. Пусковой механизм 86 показан в состоянии готовности, когда пружина 98 полностью сжата и электромагнит 96 магнитно соединен с связующим звеном 92.
Электромагнит 96 выполнен с возможностью его намагничивания, когда он в обесточенном состоянии, и размагничивания, когда он подключен к источнику электропитания. Таким образом, во время нормальной безопасной работы кабины 88 электромагнит 96 выполнен с возможностью удерживания связующего звена 92 и сжатой цилиндрической винтовой пружины 98 без необходимости непрерывной подачи электропитания. Когда обнаружено опасное состояние превышения скорости или превышения ускорения, пусковой механизм 86 может быть разблокирован для взаимодействия с ловителем, соединенным с подъемным стержнем 90 посредством передачи электрического импульса электромагниту 96 для разъединения магнитного соединения с связующим звеном 92 и тем самым высвобождения энергии, сохраненной в сжатой пружине 98, для приведения пружины 98 к разжатию. Посредством разжатия пружины 98 связующее звено 92 перемещается для перемещения подъемных стержней 90 и тем самым для взаимодействия с указанным ловителем для замедления или остановки кабины 88.
Линейный исполнительный механизм 94 представляет собой электрический исполнительный механизм, который содержит электродвигатель 94а, оперативно соединенный с валом 94b привода. Электродвигатель 94а выполнен с возможностью использования в нем, например, шариковой винтовой пары или системы привода с червячным винтом для преобразования вращательного движения электродвигателя 94а в линейное движение вала 94b. Электродвигатель 94а может быть выполнен неимеющим обратного хода, чтобы пусковой механизм 86 был энергоэффективным и менее сложным. Исполнительные механизмы, не имеющие обратного хода, выполнены с возможностью их установки в определенном положении, например, в положении с выдвинутым или отведенным назад валом 94b, и с возможностью их удерживания в указанном положении без непрерывной подачи электропитания на указанный исполнительный механизм. Вал 94b привода выполнен с возможностью его движения только во время операции приведения в исходное состояние, сначала для соединения с электромагнитом 96, а затем для перемещения механизма ловителя обратно на его место в исходном состоянии.
Показанный на фиг.5 пусковой механизм 86 выполнен с возможностью использования в нем цилиндрической винтовой пружины 98, однако в соответствии с другими вариантами реализации могут быть использованы различные механические пружины или другие упругие элементы. Например, пусковой механизм 86 выполнен с возможностью использования в нем торсионной пружины, соединенной с связующим звеном 92 в точке 100 поворота. Указанная торсионная пружина установлена с возможностью удерживания ее в сжатом состоянии, когда исполнительный механизм 94 отведен назад и электромагнит 96 магнитно соединен с связующим звеном 92.
СИСТЕМА ОБНАРУЖЕНИЯ И ОБРАБОТКИ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ
Обычно лифтовые системы выполняют с возможностью выявления наличия состояний бесконтрольного перемещения и свободного падения и обеспечения взаимодействия лифтовых ловителей. Состояние бесконтрольного перемещения представляет собой состояние, когда тормоза машинного отделения лифта отказываются удерживать кабину, когда она перемещается в любом направлении, развивая максимальное пороговое ускорение. Состояние свободного падения представляет собой состояние, когда лифт перемещается вниз с ускорением 1g. Приведение в действие ловителей обычно означает, что вывод системы привода из взаимодействия и включение тормоза машинного отделения отказали, или ожидается их отказ для остановки кабины лифта при опасных скоростях и/или ускорениях.
Правилами, относящимися к лифтам, определена максимальная скорость, при которой ловители должны тормозить лиф. Некоторыми специальными правилами определены две настройки скорости - одна для включения тормоза и вывода системы привода из взаимодействия, и одна для применения ловителей.
Иногда пассажиры являются причиной нарушения работы лифта на короткий период времени, из-за чего кажется, что система превышает скорость и/или ускорение. Ловители лифта не должны реагировать на эти нарушения. К примерам нарушений пассажирами работы лифта, несоздающим опасные состояния, относятся подпрыгивание в кабине и раскачивание кабины, вызывающие колебания кабины. Например, пассажиры могут вызвать колебания лифта от 2 до 4 герц с амплитудой 0,4 м/с (1,3 футов/с). Кроме того, не должно происходить ложного взаимодействия указанных ловителей под действием экстренного торможения или буферных ударов. Сигналы о скорости обычно получены посредством тягового датчика перемещений или преобразователя какого-либо типа, в том числе например, тахометра, описанного выше. Эти устройства могут выдавать кратковременные ложные показания из-за потери тяги. В соответствии с некоторыми вариантами реализации, системы обнаружения и обработки превышения ускорения и превышения скорости выполнены с возможностью обнаружения таких состояний лифтовой системы, как состояние бесконтрольного перемещения и состояние свободного падения, посредством различения превышения ускорения и превышения скорости, вызванных состояниями, не относящимися к безопасности пассажиров, и вызванных опасными состояниями. После обнаружения фактического состояния бесконтрольного перемещения и/или состояния свободного падения указанные системы электронно приводят в действие тормоз машинного отделения и в случае необходимости приводят в действие указанные ловители.
Система обнаружения и обработки превышения ускорения и превышения скорости содержит электромеханический датчик скорости и датчик ускорения, соединенные с контроллером и выполненные с возможностью подачи сигналов, как показано на фиг.2 и как описано со ссылкой на этот чертеж. Указанный контроллер содержит микропроцессор и связанные с ним схемы. По меньшей мере один алгоритм обнаружения и обработки превышения ускорения и превышения скорости, включенный в указанную систему, выполнен с возможностью его ввода во встроенное программное обеспечение или с возможностью сохранения в памяти для использования посредством микропроцессора. Внутриплатная память может содержать, например, флэш-память.
На фиг.6 в соответствии с одним вариантом реализации показана блок-схема способа 120 обнаружения и обработки состояний превышения ускорения и превышения скорости для массы лифтовой системы (например, кабины или противовеса). Как описано выше, способ 120 выполнен по меньшей мере как одно программное или аппаратное обеспечение, основанное на алгоритмах, выполняемых посредством контроллера. Способ 120 включает получение от датчика скорости измеренной скорости указанной массы (этап 122) и получение от датчика ускорения измеренного ускорения указанной массы (этап 124). Отфильтрованная скорость указанной массы рассчитана как функция указанной измеренной скорости и указанного измеренного ускорения (этап 126), Указанную отфильтрованную скорость сравнивают с пороговой скоростью для определения того, достигла ли указанная масса состояния превышения скорости (этап 128).
Необработанный сигнал скорости, зарегистрированный посредством указанного датчика скорости, может иметь погрешности, наиболее типичная из которых, например, проскальзывание тахометра, использованного в качестве указанного датчика скорости. С целью уменьшения воздействия таких погрешностей на указанную систему возможно комбинирование указанной измеренной скорости с указанным измеренным ускорением, так чтобы создать комбинированную (отфильтрованную) скорость, которая имеет меньшую суммарную погрешность. Указанную отфильтрованную скорость рассчитывают (этап 126) с использованием, например, пропорционального плюс интегрального фильтра (PI) с измеренным ускорением, введенным в замкнутый контур для внесения поправок по ошибочным состояниям, включая, например, проскальзывание указанного датчика скорости.
Отфильтрованная скорость может быть рассчитана как функция измеренной скорости и измеренного ускорения (этап 126) посредством первоначально умножения погрешности скорости на приращение для определения пропорциональной погрешности скорости. Указанная погрешность скорости также интегрирована, и интегрированная погрешность скорости умножена на указанное приращение для определения интегрированной пропорциональной погрешности скорости. Пропорциональная погрешность скорости, интегрированная пропорциональная погрешность скорости и измеренное ускорение суммируют для определения отфильтрованного ускорения. Указанное отфильтрованное ускорение интегрировано для определения указанной отфильтрованной скорости. Расчет отфильтрованной скорости может быть введен в непрерывный контур, в котором погрешность скорости равна разности измеренной скорости и отфильтрованной скорости, рассчитанной посредством контроллера в предыдущем цикле через указанный контур. Эффект фильтрации пропорционального плюс интегрального фильтра (PI) в том, чтобы обеспечить преобладание информации об ускорении при более высоких частотах, на которых датчик ускорения показывает более высокую точность, чем датчик скорости, и обеспечить преобладание информации о скорости при более низких частотах, на которых датчик скорости показывает более высокую точность, чем датчик ускорения.
В соответствии с некоторыми вариантами реализации, возможен мониторинг погрешности скорости и погрешности ускорения во время нормальной работы лифта для обнаружения сбоя в работе датчика скорости или датчика ускорения. Возможно пропускание погрешности ускорения и погрешности скорости через низкочастотный фильтр, и возможно признание ошибки датчика, если погрешность ускорения или погрешность скорости превышает пороговый уровень погрешности.
Кроме расчета отфильтрованной скорости (этап 126), способ 120 включает сравнивание отфильтрованной скорости с пороговой скоростью для определения того, достигла ли указанная масса состояния превышения скорости (этап 128). Первоначально точка обнаружения превышения скорости обычно имеет место, когда скорость лифтовой массы превышает порог превышения скорости, обычно установленный уполномоченными промышленными органами. Приводная и тормозная системы оказываются обесточенными, когда превышен указанный порог превышения скорости. Однако, если состояние превышения скорости обнаружено без дополнительных состояний, то указанная система должна быть чувствительна к различным помехам, включая, например, помехи, обусловленные подпрыгиванием пассажиров в кабине лифта. Для смягчения этих помех возможно использование различных способов обработки, в том числе, например, сигнализирование о состоянии превышения скорости, только когда скорость массы превышает пороговую скорость в течение продолжительного периода времени (т.н. периода времени превышения скорости).
Указанный период времени превышения скорости может быть постоянной величиной, например, 1 секунда. В соответствии с другим вариантом реализации, период времени превышения скорости может быть рассчитан как функция величины, на которую отфильтрованная скорость превышает пороговую скорость. Например, на фиг.7 показан график периода времени превышения скорости, построенный как функция разности отфильтрованной скорости лифтовой массыи пороговой скорости, которая первоначально подает сигнал о возможном состоянии превышения скорости. Как показано на фиг.7, кривая 130 представляет собой один вариант введения дополнительного состояния времени превышения скорости перед сигнализированием о том, что указанная лифтовая масса находится в состоянии превышения скорости. Как показано на фиг.7, время превышения скорости экспоненциально обратно пропорционально относится к величине, на которую отфильтрованная скорость превышает указанную пороговую скорость. Таким образом, поскольку отфильтрованная скорость лифтовой массы превышает пороговую скорость в возрастающих величинах, время превышения скорости (т.е. время, в течение которого указанная масса должна иметь скорость, превышающую указанный порог, перед сигнализированием о состоянии превышения скорости) уменьшается экспоненциально. После сравнивания отфильтрованной скорости с пороговой скоростью для определения того, достигла ли указанная масса состояния превышения скорости (этап 128), что может включать определение того, является ли указанная отфильтрованная скорость массы большей, чем указанный порог в течение указанного времени превышения скорости, способ 120 может также содержать включение механического тормоза приводного шкива.
Как описано выше, при определенных обстоятельствах включение тормоза приводного шкива не срабатывает при остановке указанной лифтовой массы и сигнализирует о состоянии бесконтрольного перемещения. Таким образом, способ 120 может содержать стадию разблокирования электромеханического пускового механизма ловителя для взаимодействия с ловителем лифта, когда указанная масса находится в состоянии превышения скорости после включения механического тормоза приводного шкива. Точка срабатывания, в которой сигнализируется состояние бесконтрольного перемещения, может зависеть от скорости Vт, при которой указанная масса, ускоряющаяся при установленном коэффициенте А, тратит время Ts на достижение предписанной правилами скорости Vc для применения силы торможения ловителей. Например, лифт/ имеющий скорость 1 м/с, ускоряющийся с ускорением 0,26 g, проходит от первоначального порога превышения скорости 1,057 м/с до требуемой кодексом скорости Vc, равной 1,43 м/с, за 145 миллисекунд. Для приведения в действие ловителей и взаимодействия с ними необходимо 25 миллисекунд. Таким образом, скорость vт срабатывания равна 1,35 м/с и представляет собой скорость, которая за 120 миллисекунд (145-25) возрастает от 1,057 м/с. Эта скорость срабатывания дает необходимое время (25 миллисекунд) для приведения в действие ловителей, перед тем как достигнута предписанной правилами скорость.
В системах лифтового ловителя следует учитывать, кроме состояний бесконтрольного перемещения, отдельное опасное состояние, известное как состояние свободного падения. При свободном падении масса лифтовой системы беспрепятственно падает без блокирования посредством тормоза или без приведения в действие ловителя. В математическом смысле состояние свободного падения происходит, когда масса перемещается вниз с ускорением 1 g. Вследствие того, что масса при свободном падении беспрепятственно падает без блокирования посредством тормоза или приведения в действие ловителей, она перемещается от первоначального порога превышения скорости к точке, в которой указанные ловители должны начать приложение силы торможения быстрее, чем начнется бесконтрольное перемещение. Например, лифт, имеющий скорость 1 м/с, при свободном падении может переместиться от порога превышения скорости 1,057 м/с к предписанной правилами точке срабатывания за 45 миллисекунд. Если в системе лифтового ловителя используется только показатель скорости массы, то приведение в действие ловителей должно начаться при достижении гораздо более низкой скорости, в результате чего происходит большее количество ложных срабатываний от влияния помех, не связанных с вопросами обеспечения безопасности. Таким образом, отфильтрованное ускорение, определяемое скоростью, может быть использовано для устранения помех и сокращения времени реагирования.
Таким образом, способ 120 может также включать этапы сравнения отфильтрованного ускорения с пороговым ускорением и измерения того, как долго указанная масса пребывает в состоянии превышения скорости. Отфильтрованное ускорение рассчитывается как часть расчета отфильтрованной скорости указанной массы (этап 126) и равно сумме пропорциональной погрешности скорости, интегрированной пропорциональной погрешности скорости и измеренного ускорения. В случае, если отфильтрованное ускорение и время превышения скорости превышают установленные пороги, способ 120 может также содержать включение тормоза приводного шкива и ловителей лифта одновременно. Например, тормоз машинного отделения и ловители выполнены с возможностью приведения их в действие, если отфильтрованное ускорение превышает 0,5 g и указанная лифтовая масса перемещается вниз со скоростью большей, чем порог превышения скорости, непрерывно в течение 10 миллисекунд. Благодаря относительно короткому непрерывному периоду времени превышения порога скорости/ можно избежать срабатываний при состояниях ударных нагрузок, например, когда пассажир воздействует на платформу при подпрыгивании. Уточнение ускорения информацией о скорости предотвращает срабатывания в других случаях, в том числе, например, в случаях аварийных остановок и буферных ударов.
Кроме того, способ 120 может содержать фильтрацию необработанных измерений ускорения по меньшей мере на одной частоте для уменьшения влияния внешних помех. Фильтрация измеренного ускорения может включать фильтрацию измеренного ускорения через по меньшей мере один низкочастотный фильтр и полосовой заграждающий фильтр в диапазоне резонансных колебаний подъемного отделения лифта. Например, измеренное ускорение может быть сначала пропущено через низкочастотный фильтр для удаления высокочастотных помех. Затем указанное ускорение может быть пропущено через полосовой заграждающий фильтр для удаления эффектов от колебаний, не связанных с вопросами обеспечения безопасности, в том числе, например, с подпрыгиванием пассажиров в кабине и возбуждением системы во время аварийных остановок. Полосовой заграждающий фильтр предназначен для уменьшения эффектов резонансных колебаний подъемного отделения лифта, в том числе, например, с границей отсекания 10 дБ при частотах от 2,5 до 6 Гц.
Настоящее изобретение описано со ссылкой на примерные варианты реализации, однако для специалиста в данной области техники очевидно, что возможны изменения по форме и деталям/ не выходящие за пределы объема настоящего изобретения, определенного нижеследующей формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОБНАРУЖЕНИЯ И ОБРАБОТКИ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2487074C2 |
| УСТРОЙСТВО КОНТРОЛЯ ДЛЯ ЛИФТОВОЙ УСТАНОВКИ | 2016 |
|
RU2717604C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ТЯЖЕЛОГО ГРУЗА | 2010 |
|
RU2550790C2 |
| СПОСОБ АКТИВАЦИИ ЛОВИТЕЛЯ | 2011 |
|
RU2576366C2 |
| Лифт грузопассажирский рудничный | 2020 |
|
RU2784651C1 |
| СПАСАТЕЛЬНАЯ ЛИФТОВАЯ СИСТЕМА | 2009 |
|
RU2500604C2 |
| БЛОК КОНТРОЛЯ СКОРОСТИ И УСКОРЕНИЯ С УПРАВЛЯЕМЫМ ЭЛЕКТРОННЫМ СПОСОБОМ ПУСКОВЫМ СЕРВОМЕХАНИЗМОМ ДЛЯ ПРИМЕНЕНИЯ В ПОДЪЕМНО-ТРАНСПОРТНЫХ СРЕДСТВАХ | 2008 |
|
RU2472693C2 |
| ЛИФТОВАЯ УСТАНОВКА, СОДЕРЖАЩАЯ КАБИНУ И ПРОТИВОВЕС | 2011 |
|
RU2583829C2 |
| Система управления грузопассажирским лифтом | 2022 |
|
RU2791781C1 |
| Способ механической блокировки движения кабины лифта с открытыми кабинными дверями и устройство для его осуществления. | 2020 |
|
RU2735336C1 |
Изобретение относится к электронной системе безопасности лифта. Лифтовая система содержит кабину (16), противовес, приводное устройство, кабели (12), тахометр (42), акселерометр (44), механический ловитель, электромагнитный пусковой механизм (46), контроллер (48). С помощью контроллера (48) разблокируют электромагнитный пусковой механизм (46) для взаимодействия с механическим ловителем, когда посредством тахометра (42) или акселерометра (44) подан сигнал о превышении скорости или ускорения соответственно кабины (16) или противовеса. Автоматически приводят электромагнитный пусковой механизм (46) в исходное состояние. Достигается повышение безопасности. 2 н. и 18 з.п. ф-лы, 7 ил.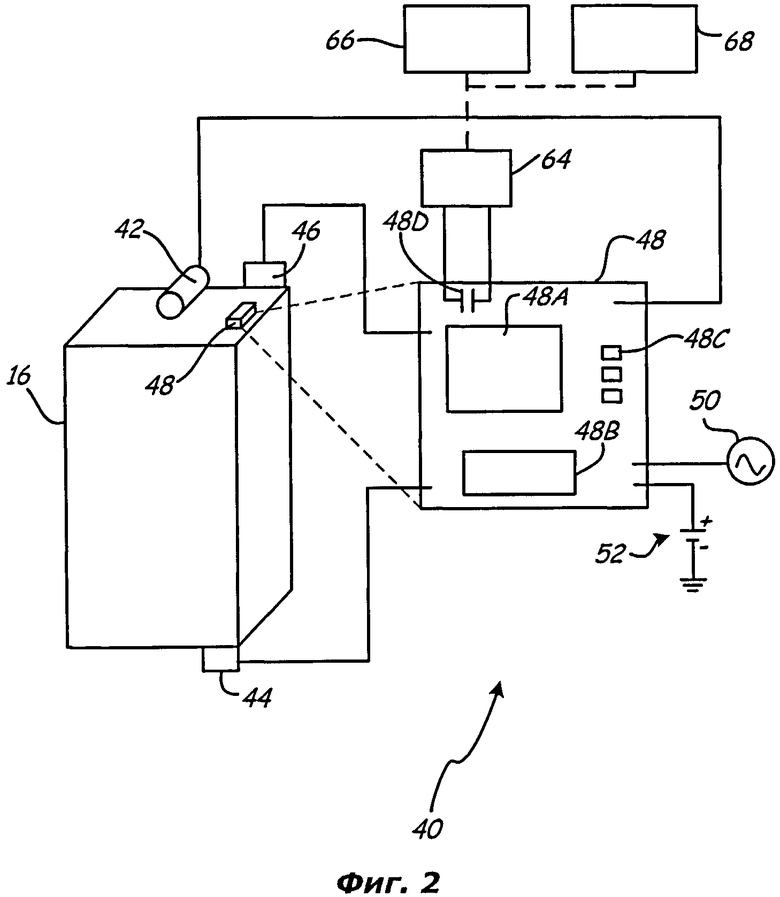
1. Система лифтового ловителя, содержащая: датчик скорости, выполненный с возможностью измерения скорости массы лифтовой системы; датчик ускорения, выполненный с возможностью измерения ускорения указанной массы; механический ловитель, выполненный с возможностью соединения с указанной массой; электромагнитный пусковой механизм, соединенный с ловителем; и контроллер, выполненный с возможностью разблокирования пускового механизма для обеспечения взаимодействия с ловителем, когда (а) посредством датчика скорости определено состояние превышения скорости или (b) посредством датчика ускорения определено состояние превышения ускорения для указанной массы, и с возможностью автоматического приведения пускового механизма в исходное состояние.
2. Система по п.1, в которой пусковой механизм выполнен с возможностью разблокирования во время приведения исполнительного механизма в исходное состояние посредством контроллера.
3. Система по п.1, в которой датчик скорости содержит счетчик тахометр.
4. Система по п.3, в которой тахометр выполнен с возможностью приведения в действие посредством шкива, вращаемого со скоростью, соответствующей скорости указанной массы.
5. Система по п.4, в которой шкив содержит свободновращающийся шкив, соединенный с указанной массой.
6. Система по п.3, в которой тахометр выполнен с возможностью соединения с указанной массой и приведения в действие неподвижным тросом, расположенным вблизи указанной массы.
7. Система по п.3, в которой тахометр выполнен с возможностью соединения с указанной массой и приведения в действие направляющим рельсом, расположенным вблизи указанной массы.
8. Система по п.1, в которой датчик ускорения содержит акселерометр.
9. Система по п.8, в которой акселерометр содержит микроэлектромеханическую систему.
10. Система по п.8, в которой акселерометр выполнен с возможностью соединения с указанной массой.
11. Система по п.1, в которой указанная масса лифтовой системы представляет собой кабину или противовес.
12. Лифт, содержащий: кабину; противовес; приводное устройство; тяговый элемент, соединенный между кабиной и противовесом и приводимый в действие приводным устройством; и систему ловителя, содержащую: датчик скорости, выполненный с возможностью мониторинга скорости кабины или противовеса; датчик ускорения, выполненный с возможностью мониторинга ускорения кабины или противовеса; механический ловитель, соединенный с кабиной или противовесом; электромагнитный пусковой механизм, соединенный с механическим ловителем; и контроллер, выполненный с возможностью разблокирования пускового механизма для обеспечения взаимодействия с механическим ловителем, когда посредством датчика скорости подан сигнал о состоянии превышения скорости или посредством датчика ускорения подан сигнал о состоянии превышения ускорения для кабины или противовеса, и с возможностью автоматического приведения пускового механизма в исходное состояние.
13. Лифт по п.12, в котором пусковой механизм выполнен с возможностью разблокирования во время приведения исполнительного механизма в исходное состояние посредством контроллера.
14. Лифт по п.12, в котором датчик скорости содержит тахометр.
15. Лифт по п.14, в котором тахометр выполнен с возможностью приведения в действие посредством шкива, вращаемого со скоростью, соответствующей скорости кабины или противовеса.
16. Лифт по п.15, в котором шкив содержит свободновращающийся шкив, соединенный с кабиной или противовесом.
17. Лифт по п.14, в котором тахометр выполнен с возможностью соединения с неподвижным тросом, расположенным вблизи кабины или противовеса, и с возможностью приведения в действие указанным неподвижным тросом.
18. Лифт по п.14, в котором тахометр выполнен с возможностью соединения с направляющим рельсом, расположенным вблизи кабины или противовеса, и с возможностью приведения в движение указанным направляющим рельсом.
19. Лифт по п.12, в котором датчик ускорения содержит акселерометр.
20. Лифт по п.19, в котором акселерометр содержит микроэлектромеханическую систему.
| Вертикальный ветряной двигатель | 1927 |
|
SU7402A1 |
| Устройство аварийного торможения кабины лифта | 1989 |
|
SU1687551A1 |

