Уровень техники
При удовлетворении многих своих энергетических нужд человечество находится в зависимости от углеводородов. Поэтому нефтепромысловые операторы стремятся добывать и продавать углеводороды с максимальной возможной эффективностью. Значительная часть легкодоступной нефти уже добыта, и для извлечения менее доступных углеводородов разрабатываются новые технологии. В этих технологиях часто вблизи одной или нескольких существующих скважин бурят ствол. Одним из способов таких технологий является Парогравитационный Дренаж ПГД (SAGD - от англ. Steam-Assisted Gravity Drainage Oil Recovery Process), раскрываемый в патенте США. 6257334 «Steam-Assisted Gravity Drainage Heavy Oil Recovery Process» (Процесс извлечения тяжелой нефти с помощью закачки пара). В способе ПГД (SAGD) используют пару горизонтальных скважин, удаленных друг от друга по вертикали на расстояние менее 10 метров, причем тщательный контроль расстояния между скважинами важен для эффективности технологии. Другие примеры направленного бурения вблизи существующей скважины включают в себя пересечение стволов для предотвращения выброса из скважины, бурение множества скважин с морской платформы и бурение близкорасположенных скважин для извлечения геотермической энергии.
Одним из путей направления ствола скважины вблизи обсаженной скважины является использование инструментов Электромагнитного ЭМ (ЕМ - от англ. ElectroMagnetic) Каротажа. Инструменты ЭМ (ЕМ) каротажа способны измерять разнообразные параметры пласта, включая сопротивление пласта, границы пласта, анизотропию пласта и угол падения. Так как эти инструменты обычно разрабатываются для измерения именно этих параметров, их применение для обнаружения обсадных труб может ухудшаться их чувствительностью к таким параметрам окружающей среды. В частности, отклик инструмента на близкорасположенную обсадную трубу может быть скрыт откликом инструмента на различные параметры окружающей среды, что сделает невозможным обнаружение и отслеживание хода обсаженной скважины, или же, наоборот, заставит инструмент подавать ложные сигналы обнаружения, вводящие в заблуждение буровиков, которые будут считать, что отслеживают находящуюся рядом обсадную скважину, которой на самом деле там нет. По-видимому, эти сложности ранее не признавались и не получали должного внимания.
Раскрытие изобретения
Для обеспечения возможности надежного обнаружения близкорасположенной обсадной трубы при бурении новой скважины предложен способ промысловых геофизических исследований для бурения второго ствола в определенной позиции относительно первого ствола в пласте с высоким электрическим сопротивлением, включающий в себя: получение результатов измерения сопротивления пласта из первого ствола; определение ожидаемого уровня сигнала окружающей среды для второго ствола, находящегося в определенной позиции относительно первого ствола, по меньшей мере, частично по результатам измерений сопротивления пласта; сравнение уровня сигнала обнаружения для первого ствола с ожидаемым уровнем сигнала окружающей среды, чтобы определить диапазон приемлемых величин расстояния передатчик-приемник и рабочей частоты, обеспечивающий превышение ожидаемого уровня сигнала окружающей среды уровнем сигнала обнаружения для первого ствола; выбор, по меньшей мере, одной из величин расстояния передатчик-приемник и рабочей частоты из определенного диапазона, и обеспечение в компоновке низа бурильной трубы второго ствола каротажного инструмента с наклонными антеннами, имеющего выбранное расстояние между антеннами и/или рабочую частоту.
Предложенный способ позволяет оптимизировать расстояние передатчик-приемник и рабочую частоту для использования с электромагнитным каротажным устройством, в частности, при параллельном бурении, таким образом, чтобы обеспечить надежное обнаружение близкорасположенной обсадной трубы в пласте с высоким электрическим сопротивлением.
Согласно одному из возможных вариантов осуществления способа, желательный уровень сигнала обнаружения менее чем в десять раз выше ожидаемого уровня сигнала окружающей среды.
Согласно одному из возможных вариантов осуществления способа, первый ствол обсаживают перед бурением второго ствола.
Согласно одному из возможных вариантов осуществления способа, каротажный инструмент с наклонными антеннами содержит антенные модули, которые могут быть разделены изменяемым количеством промежуточных переводников.
Согласно одному из возможных вариантов осуществления способа, каротажный инструмент с наклонными антеннами имеет программируемую рабочую частоту.
Согласно одному из возможных вариантов осуществления способа, ожидаемый уровень сигнала окружающей среды включает в себя зависимость азимутального сигнала, относимую к анизотропии пласта.
Согласно одному из возможных вариантов осуществления способа, ожидаемый уровень сигнала окружающей среды включает в себя зависимость азимутального сигнала, относимую к интерфейсу флюида пласта или к границе между пластами.
Согласно одному из возможных вариантов осуществления способа, ожидаемый уровень сигнала окружающей среды включает в себя зависимость азимутального сигнала, относимую к эффекту ствола.
Согласно одному из возможных вариантов осуществления способа, определение ожидаемого уровня сигнала окружающей среды включает в себя генерирование отклика модели на основе подбираемых расстояния передатчик-приемник и рабочей частоты.
Согласно одному из возможных вариантов осуществления способа, указанное сравнение включает в себя: определение отклика модели на сигнал обнаружения обсадной трубы по подбираемым расстоянию передатчик-приемник и рабочей частоте; и систематическое варьирование подбираемых расстояния передатчик-приемник и рабочей частоты до тех пор, пока моделируемый сигнал обнаружения обсадной трубы не превысит уровня моделируемого сигнала окружающей среды.
Также предложен инструмент для обнаружения обсадных труб, предназначенный для использования при бурении второго ствола в определенной позиции относительно первого ствола в пласте с высоким электрическим сопротивлением, имеющий: по меньшей мере одну наклонную антенну передатчика, излучающую передаваемый сигнал; и по меньшей мере две или более наклонных антенны приемника, обнаруживающих составляющие индуцированного магнитного поля, отличающийся тем, что антенны приемника удалены от антенны передатчика по меньшей мере на выбранное расстояние между антеннами, причем передаваемый сигнал имеет по меньшей мере одну частотную составляющую на выбранной рабочей частоте или ниже нее, и при этом обеспечен выбор расстояния между антеннами и рабочей частоты на основании сравнения уровня сигнала обнаружения для первого ствола с ожидаемым уровнем сигнала окружающей среды для пласта, чтобы определить диапазон приемлемых величин расстояния передатчик-приемник и рабочей частоты, обеспечивающий превышение ожидаемого уровня сигнала окружающей среды уровнем сигнала обнаружения для первого ствола.
Согласно одному из возможных вариантов осуществления инструмента, ожидаемый уровень сигнала окружающей среды включает в себя по меньшей мере одну из зависимостей: от анизотропии пласта, от интерфейса флюида пласта, от границы пластов и от эффекта ствола скважины.
Согласно одному из возможных вариантов осуществления инструмента, ожидаемый уровень сигнала обнаружения обсадной трубы основывается на заданном диапазоне обнаружения и на электрическом сопротивлении пласта.
Согласно одному из возможных вариантов осуществления инструмента, выбранное расстояние между антеннами превышает примерно 35 футов, а выбранная рабочая частота составляет менее примерно 100 кГц.
Согласно одному из возможных вариантов осуществления инструмента, выбранное расстояние между антеннами превышает примерно 40 футов, а выбранная рабочая частота составляет менее примерно 10 кГц.
Согласно одному из возможных вариантов осуществления инструмента, выбранное расстояние между антеннами превышает примерно 50 футов, а выбранная рабочая частота составляет менее примерно 1 кГц.
Согласно одному из возможных вариантов осуществления инструмента, передаваемый сигнал имеет программируемую рабочую частоту.
Согласно одному из возможных вариантов осуществления инструмента, инструмент для обнаружения обсадных труб между антенной передатчика и по меньшей мере одной антенной приемника имеет некоторое количество промежуточных переводников, причем это количество может варьироваться для обеспечения по меньшей мере одного выбранного расстояния между антеннами.
Согласно одному из возможных вариантов осуществления инструмента, инструмент содержит процессор, собирающий результаты измерений на множестве расстояний передатчик-приемник.
Краткое описание чертежей
Лучше понять разнообразные варианты осуществления раскрываемых системы и способа можно при рассмотрении нижеследующего описания совместно с чертежами, на которых:
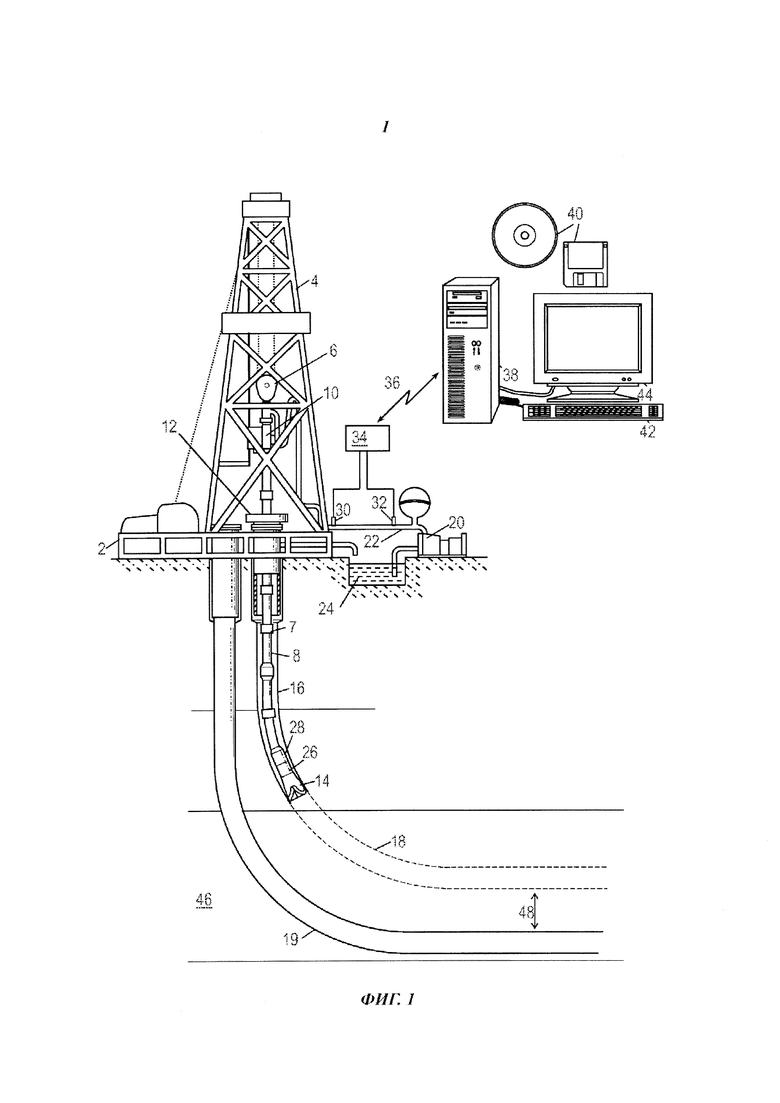
На фиг. 1 иллюстративно показана окружающая обстановка бурения, в которой можно применить бурение с электромагнитным управлением по направлению;
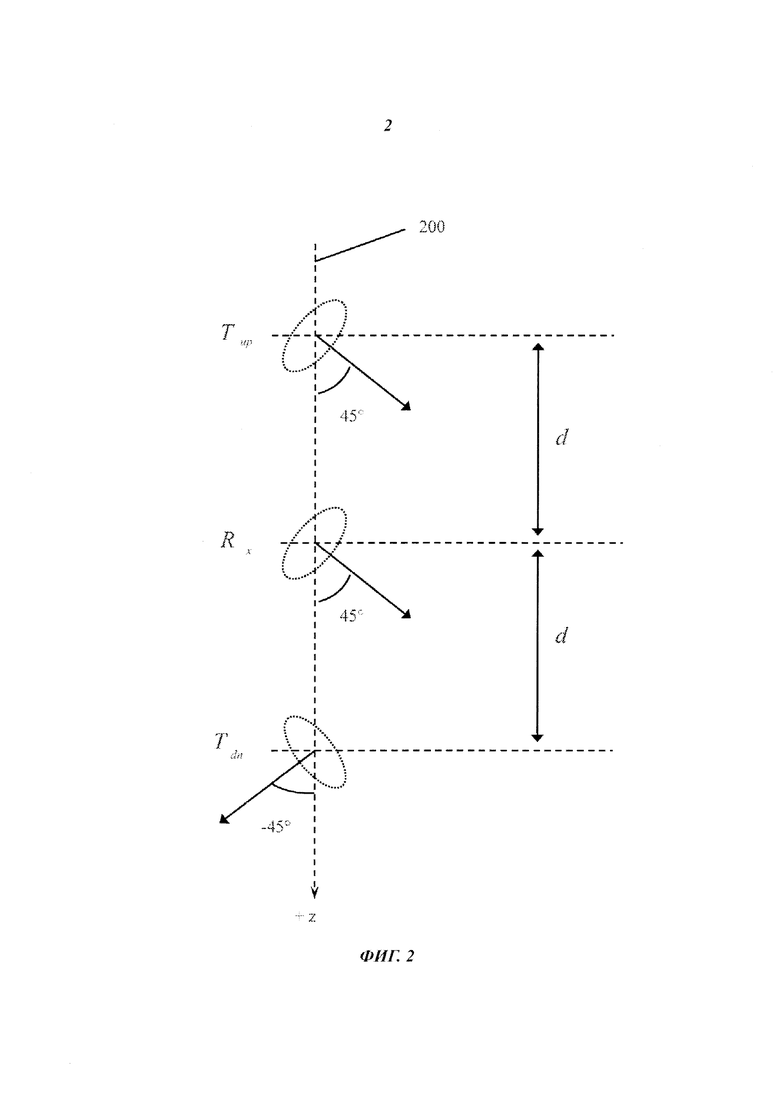
На фиг. 2 иллюстративно показана система с наклонными антеннами, имеющая параллельную и перпендикулярную пары передатчик-приемник;
На фиг. 3 иллюстративно показана модель двухслойного пласта;
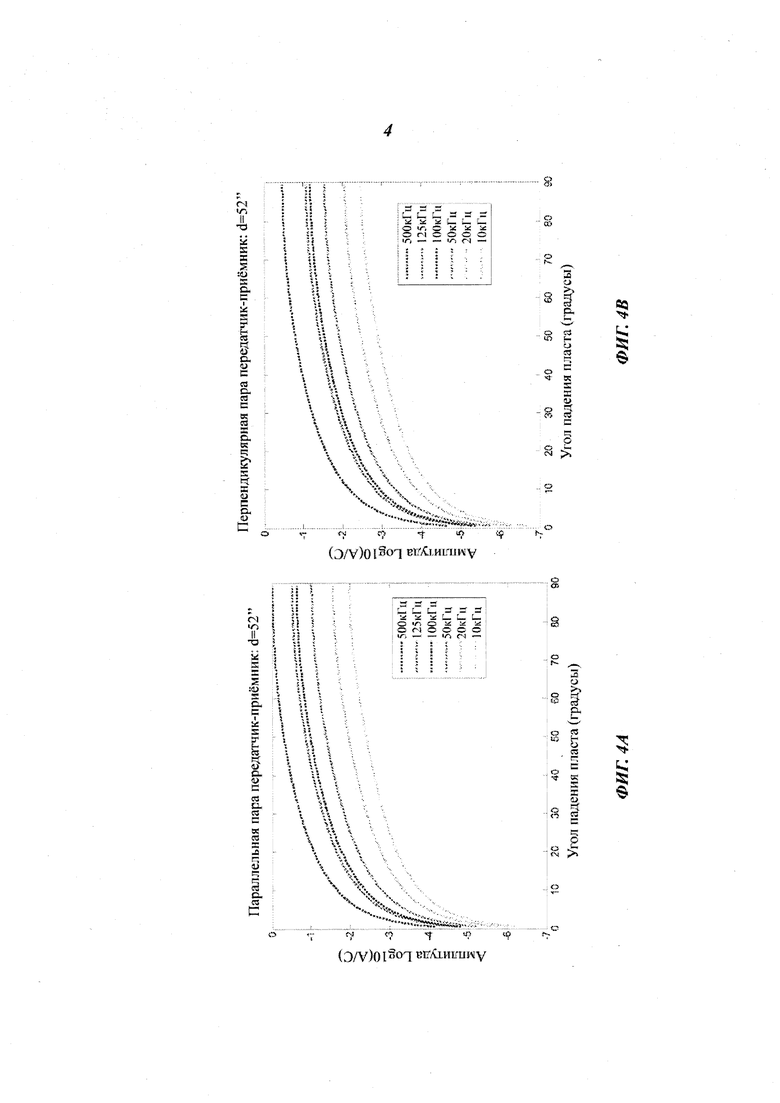
На фиг. 4А и 4В в виде функции частоты и угла падения пласта показаны отклики модели инструмента на анизотропию пласта;
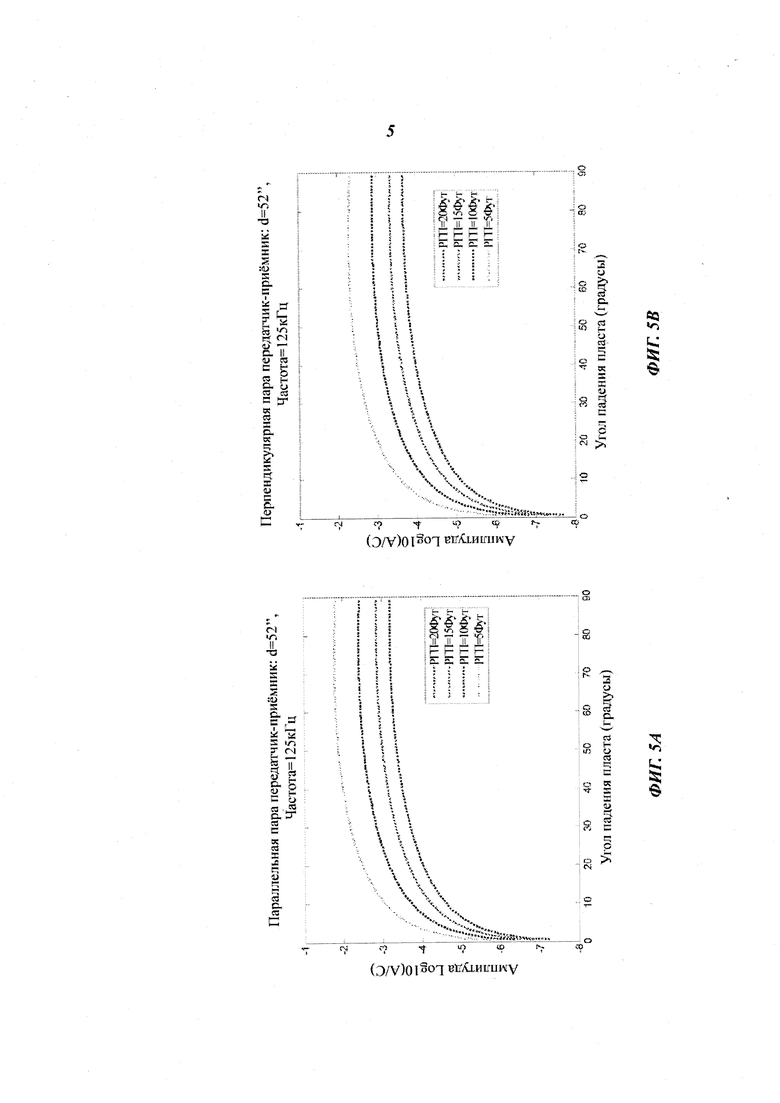
На фиг. 5А и 5В в виде функции удаления границы и угла падения пласта показаны отклики модели инструмента на близкорасположенную границу пласта;
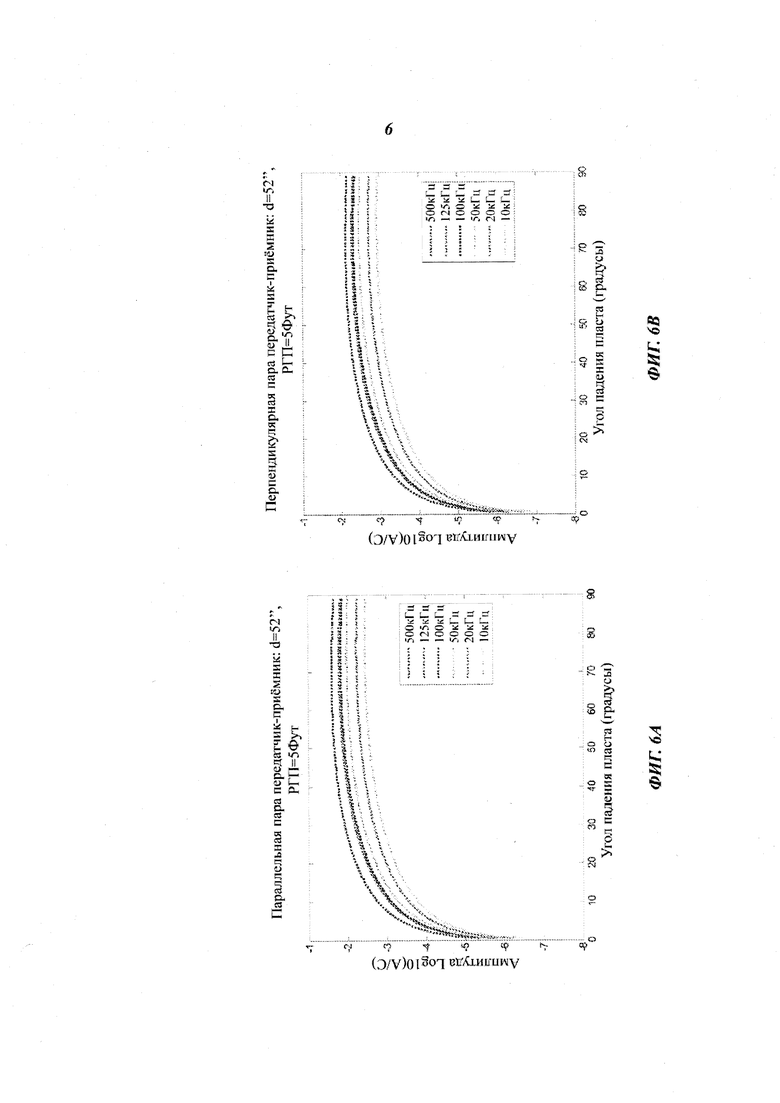
На фиг. 6А и 6В в виде функции частоты сигнала и угла падения пласта показаны отклики модели инструмента на близкорасположенную границу пласта;
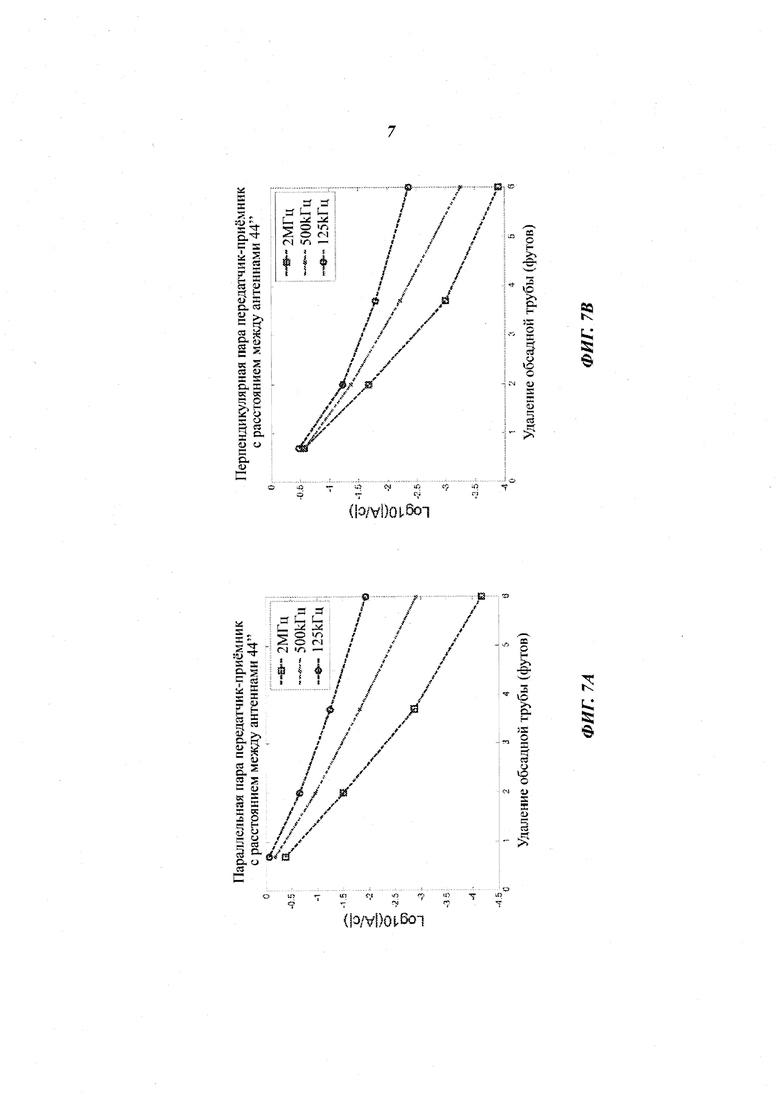
На фиг. 7А и 7В в виде функции удаления обсадной трубы и частоты показаны экспериментальные отклики инструмента с расстоянием между антеннами 44 дюйма на близкорасположенную обсадную трубу;
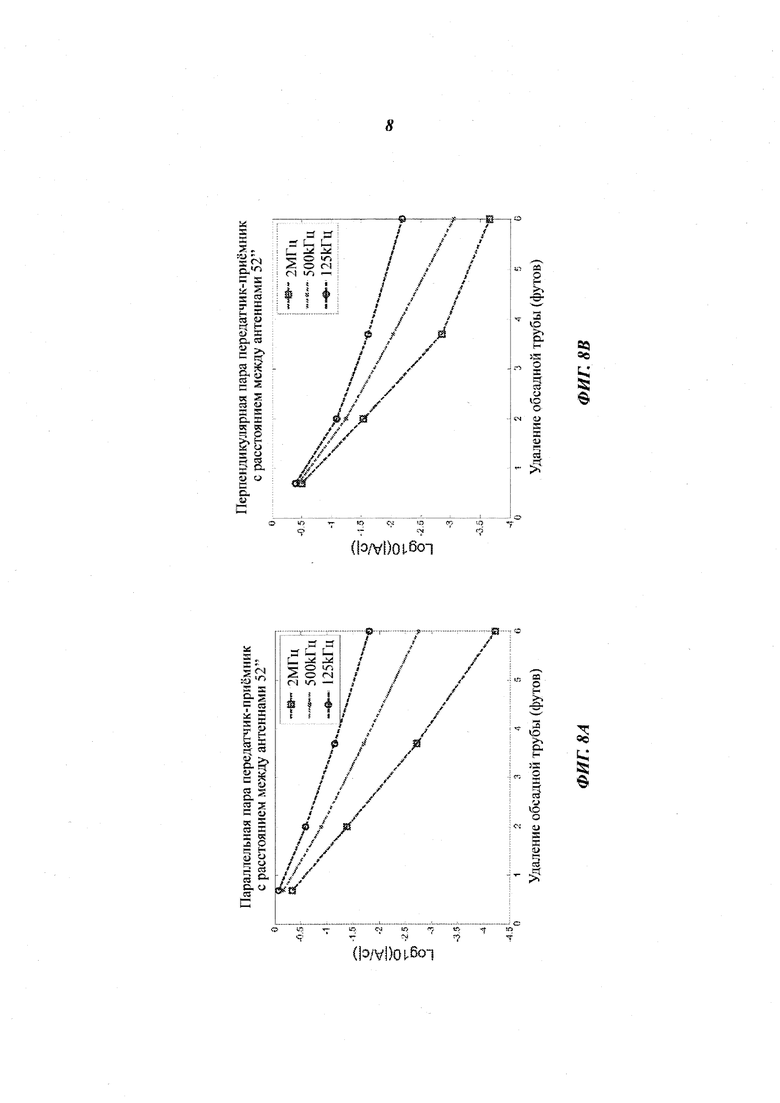
На фиг. 8А и 8В в виде функции удаления обсадной трубы и частоты показаны экспериментальные отклики инструмента с расстоянием между антеннами 52 дюйма на близкорасположенную обсадную трубу;
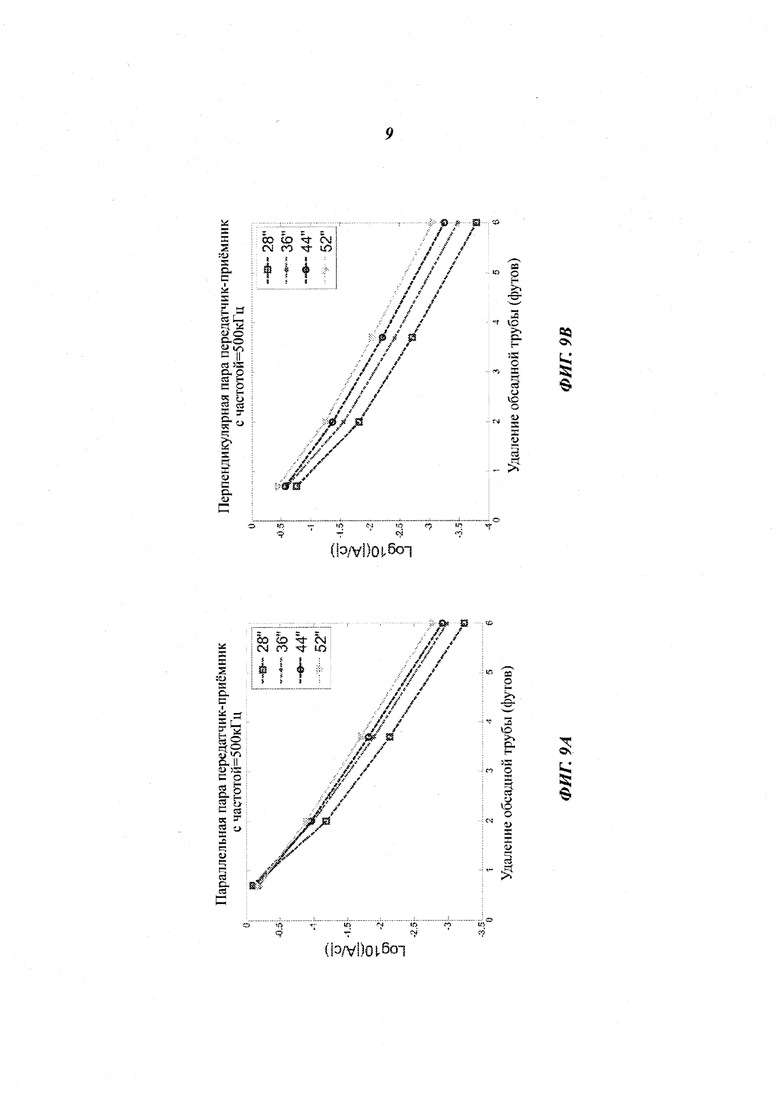
На фиг. 9А и 9В в виде функции удаления обсадной трубы и расстояния между антеннами показаны экспериментальные отклики инструмента на близкорасположенную обсадную трубу;
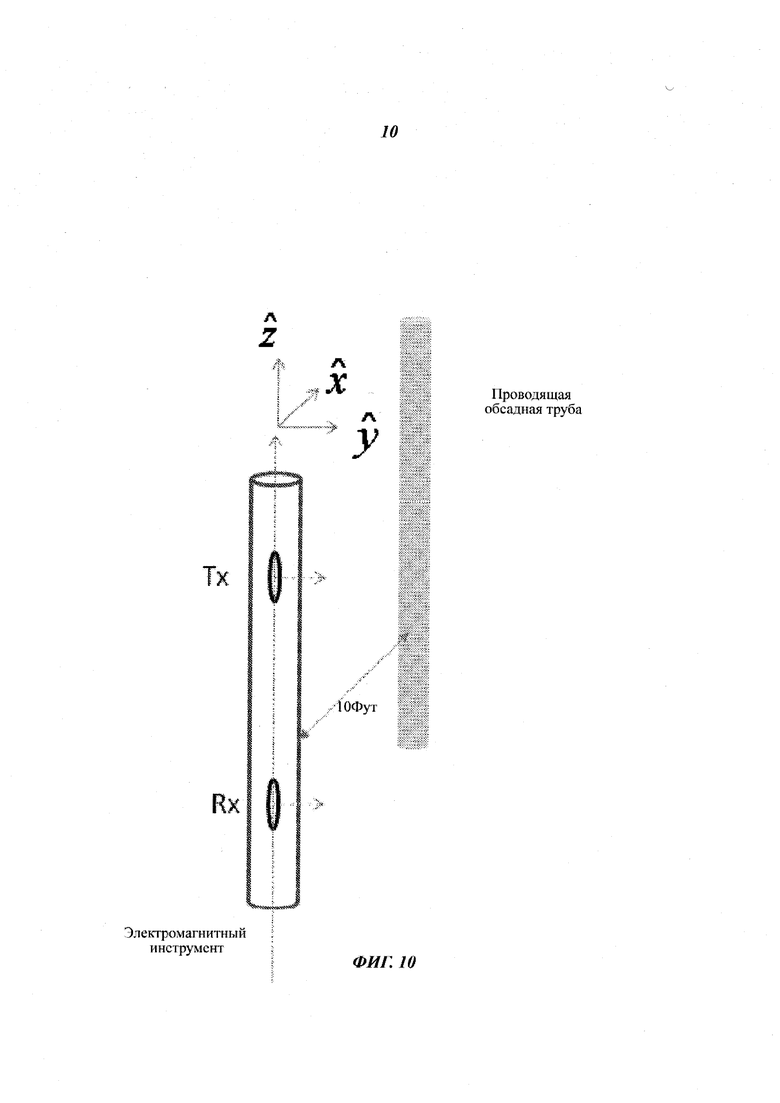
На фиг. 10 показана модель инструмента, служащая основой для расчета чувствительности к обсадной трубе;
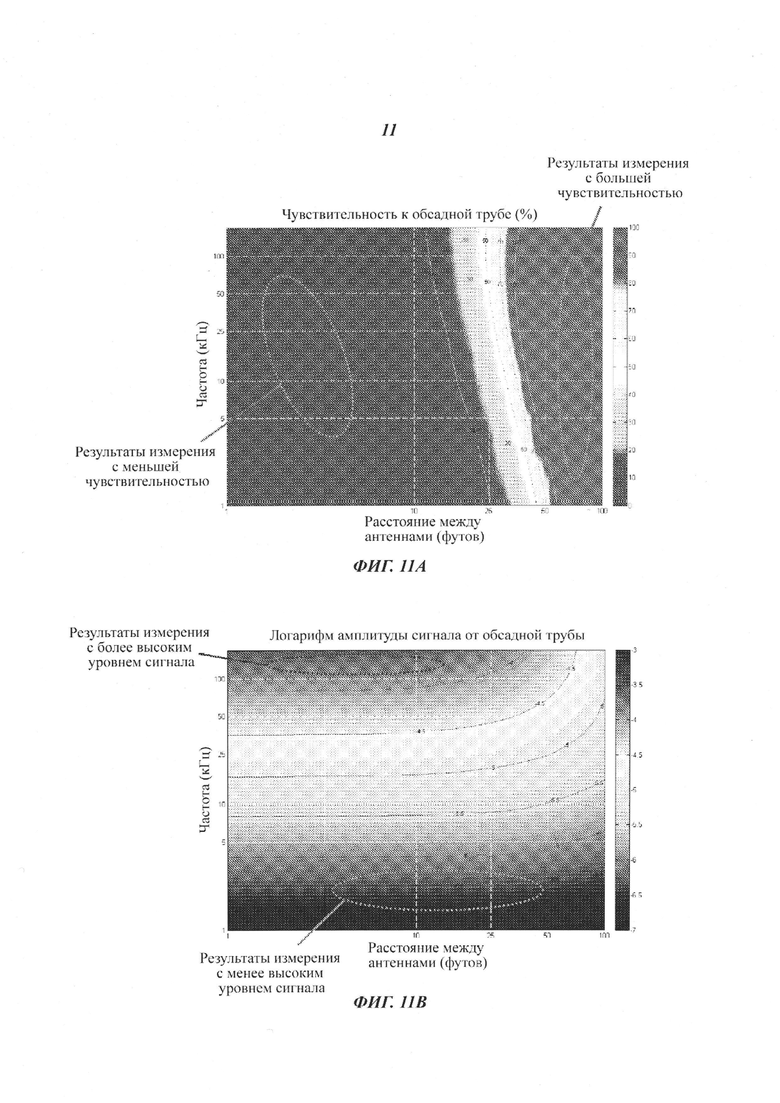
На фиг. 11А показана чувствительность инструмента в виде функции расстояния между антеннами и частоты.
На фиг. 11В показаны уровни сигнала инструмента в виде функции расстояния между антеннами и частоты;
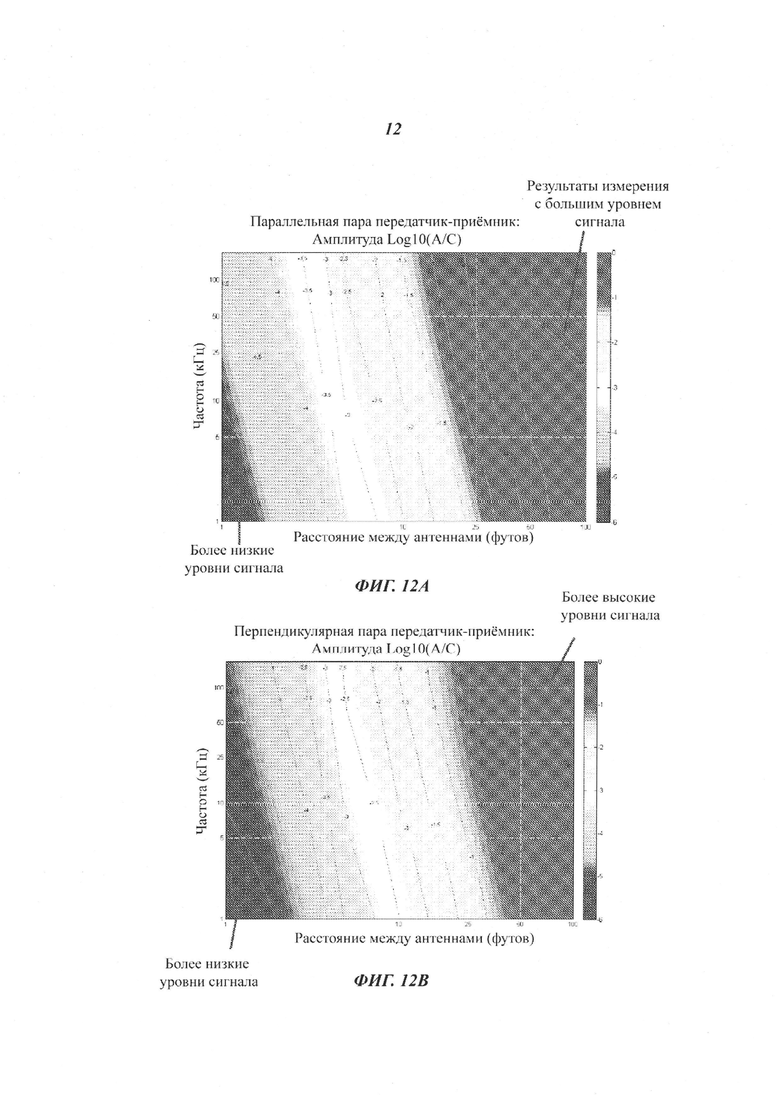
На фиг. 12А и 12В показаны отклики параллельной и перпендикулярной пар передатчик-приемник соответственно, представленные в виде функции расстояния между антеннами и частоты; и
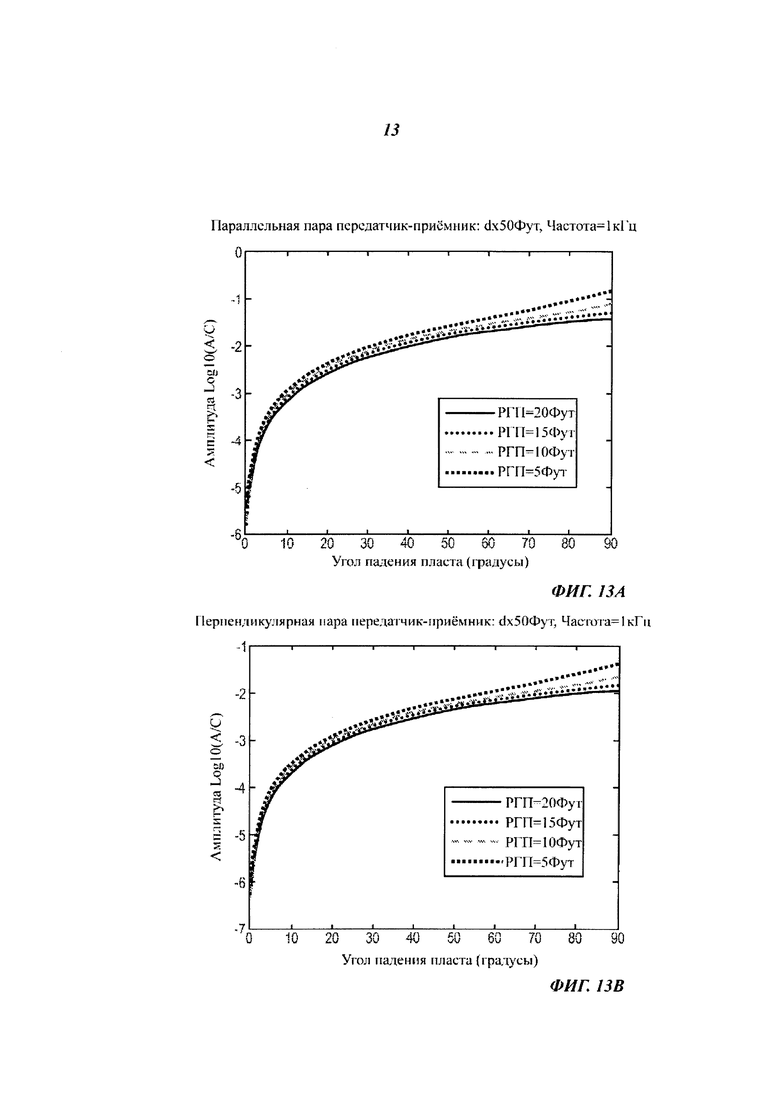
На фиг. 13А и 13В показаны отклики модели инструмента с расстоянием между антеннами 50 дюймов в виде функции удаления обсадной трубы и угла падения пласта;
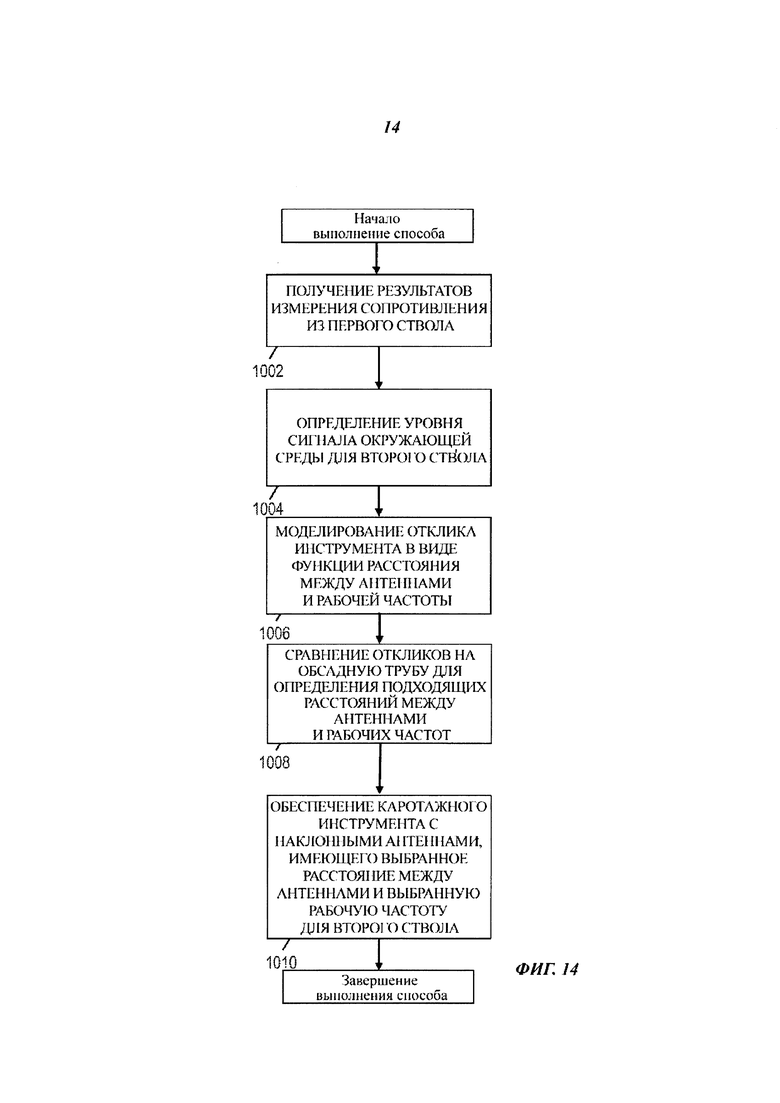
На фиг. 14 показана блок-схема иллюстративного способа обнаружения обсадной трубы.
Несмотря на то, что изобретением допускаются разнообразные альтернативные формы, эквиваленты и модификации, здесь для примера показаны на чертежах и подробно описаны частные варианты его осуществления. Тем не менее, следует понимать, что чертежи с прилагаемым подробным описанием не ограничивают раскрытие, но, наоборот, служат основой для поддержания всех альтернативных форм, эквивалентов и модификаций в границах объема прилагаемой формулы изобретения.
Осуществление изобретения
Описанные в разделе «Уровень техники» проблемы, по меньшей мере, частично решаются раскрываемыми способами и инструментами для обнаружения обсадных труб. По меньшей мере одно осуществление раскрываемого способа включает в себя получение результатов измерения сопротивления пласта из первого ствола. Исходя, по меньшей мере, частично, из этих результатов измерений определяют ожидаемый уровень сигнала окружающей среды для второго ствола, находящегося в определенной позиции относительно первого ствола. Затем выбирают по меньшей мере один из параметров - расстояние передатчик-приемник (базы) и рабочая частота - для обеспечения желательного уровня сигнала обнаружения первого ствола из второго ствола таким образом, чтобы желательный уровень обнаружения был выше ожидаемого уровня сигнала окружающей среды, а Компоновку Низа Бурильной Колонны (КНБК от англ. Bottom Hole Assembly "ВНА") разрабатывают с каротажным инструментом с наклонными антеннами который будет иметь расстояние между антеннами и/или рабочую частоту для использования во втором стволе.
По меньшей мере одно осуществление раскрываемого инструмента включает в себя наклонную передающую антенну и две или более принимающие антенны, находящиеся по меньшей мере на выбранном расстоянии от передающей антенны для обнаружения составляющих отклика на передаваемый сигнал. Передаваемый сигнал имеет частоту, равную или меньшую выбранной рабочей частоты, причем частоту выбирают совместно с расстоянием между антеннами для обеспечения того, чтобы ожидаемый уровень сигнала обнаружения обсадной трубы превышал ожидаемый уровень сигнала окружающей среды.
Для того чтобы читатель еще лучше понял раскрываемые системы и способы, мы опишем окружающую обстановку, подходящую для их использования и функционирования. На фиг. 1 показан пример окружающей обстановки геонавигации. На буровой платформе 2 установлена буровая вышка 4, имеющая подвижный талевый блок 6 для поднятия и опускания бурильной колонны 8. Верхний привод 10 несет на себе и вращает бурильную колонну 8 при опускании последней через устьевую арматуру 12. Буровое долото 14 приводится в движение забойным двигателем и/или вращением бурильной колонны 8. Вращающееся долото 14 создает ствол 16, проходящий через разнообразные пласты. Насос 20 создает циркуляцию бурового раствора через питающую трубу 22 к верхнему приводу 10, вниз по скважине через внутренность бурильной колонны 8, через отверстия в буровом долоте 14 и обратно к поверхности через кольцевое пространство вокруг бурильной колонны 8 и в резервуар 24. Буровой раствор выносит выбуренную породу из ствола скважины в резервуар 12 и способствует сохранению целостности ствола скважины.
Буровое долото 14 является всего лишь частью компоновки низа бурильной колонны, причем эта компоновка включает в себя одну или несколько утяжеленных бурильных труб (толстостенных стальных труб) для придания веса и жесткости, способствующих процессу бурения. Некоторые из этих утяжеленных бурильных труб содержат каротажные инструменты для сбора результатов измерений различных буровых параметров, таких как позиция, осевая нагрузка на долото, диаметр ствола и т.д. Ориентация инструмента может быть выражена углом торца инструмента (такая ориентация известна также под названием угловой или азимутальной ориентации), зенитным углом (наклоном) и углом по компасу, причем каждый из этих углов может быть получен по измерениям магнитометров, инклинометров и/или акселерометров, хотя не исключается использование и других измерительных преобразователей, например, гироскопов. В одном частном осуществлении инструмент включает в себя 3-коорднатный затворный магнетометр и 3-координатный акселерометр. Как известно из уровня техники, сочетание этих двух систем измерительных преобразователей позволяет измерять угол торца инструмента, зенитный угол и угол по компасу. В некоторых вариантах осуществления, угол торца инструмента и зенитный угол ствола скважины рассчитывают по выходному сигналу измерительного преобразователя акселерометра. Для расчета угла по компасу используют выходные сигналы измерительного преобразователя магнетометра.
Компоновка низа бурильной трубы также включает в себя дальномерный инструмент 26, служащий для того, чтобы индуцировать ток в соседних проводниках, которыми могут быть трубы, обсадные колонны и проводящие пласты, с целью сбора результатов измерений возникающего электромагнитного поля, чтобы определять расстояние и направление. Используя эти измерения в сочетании с измерениями ориентации инструмента, бурильщик может, например, направлять буровое долото 14 в пласте 46 вдоль по требуемой траектории 18 относительно существующей скважины 19, используя любую из разнообразных пригодных систем наклонного направленного бурения, в том числе, направляющие лопасти, «кривой переводник», и вращательную управляемую по направлению систему. Для прецизионного управления по направлению наиболее подходящим механизмом могут быть направляющие лопасти. Механизм направления может управляться, наоборот, из забоя, когда забойный контроллер программируют для следования вдоль существующего ствола 19 на заданном удалении 48 и в заданной позиции (например, непосредственно над существующим стволом скважины или под ним).
Телеметрический переводник 28, присоединенный к внутрискважинным инструментам (включая дальномерный инструмент 26) может передавать телеметрические данные на поверхность по каналу гидроимпульсной скважинной телеметрии. Передатчик в телеметрическом переводнике 28 модулирует сопротивление потоку бурового раствора, генерируя при этом импульсы давления, которые со скоростью звука проходят до поверхности вдоль по потоку бурового раствора. Один или более датчиков 30, 32 давления преобразуют сигнал давления в электрический сигнал (сигналы), направляемый в аналого-цифровой преобразователь 34. Отметим, что существуют и другие формы телеметрии, которые могут быть использованы для передачи сигнала из забоя к АЦП. В таких телеметрических системах могут быть использованы акустическая телеметрия, электромагнитная телеметрия или телеметрия по сигналопроводящей бурильной трубе.
Аналого-цифровой преобразователь 34 передает сигналы телеметрии в цифровой форме через устройство 36 связи в компьютер 38 или другое устройство обработки данных. Компьютер 38 работает по программе (которая может храниться в запоминающем устройстве 40) и по командам пользователя, вводимым через устройство ввода 42, обрабатывая и декодируя полученные сигналы. Получающиеся в результате телеметрические данные могут проходить дальнейший анализ и обработку компьютером 38 для вывода полезной информации на дисплей 44 компьютера или другое устройство вывода информации. К примеру, бурильщик может использовать данную систему для получения и контролирования параметров бурения, свойств пласта и траектории ствола новой скважины относительно ствола 19 существующей скважины, а также обнаруженных границ пласта. Затем по нисходящей линии связи на компоновку низа бурильной трубы могут передаваться команды управления по направлению.
На фиг. 2 показан пример конфигурации антенны для дальномерного инструмента 26. Именно такая конфигурации антенны рассматривается ниже в качестве частного примера для объяснения относительных эффектов параметров окружающей среды в сравнении с эффектами близкорасположенной обсадной колонны, однако выводы являются применимыми практически ко всем электромагнитным каротажным инструментам, имеющим по меньшей мере одну наклонную антенну. Соответственно, нижеследующее рассмотрение не является ограничивающим для объема раскрытия. Иллюстрируемая конфигурация включает в себя две передающие антенны (обозначенные Tup и Tdn) и принимающую антенну (обозначенную Rx) посередине между ними. Каждая из антенн наклонена на 45° от продольной оси инструмента таким образом, что приемная антенна параллельна одной передающей антенне и перпендикулярна другой. Центры антенн расположены с равными промежутками, а расстояние между принимающей и каждой из передающих антенн составляет d. При вращении инструмента передатчики излучают попеременно и сигналы, полученные приемником в ответ на излучение передатчиков Tup и Tdn соответственно составляют  и
и  , соответственно, где β является азимутальным углом инструмента. Ожидается, что отклик инструмента на близкорасположенную обсадную колонну, близкорасположенный интерфейс флюида или границу пласта, или на анизотропный падающий пласт примет следующий вид:
, соответственно, где β является азимутальным углом инструмента. Ожидается, что отклик инструмента на близкорасположенную обсадную колонну, близкорасположенный интерфейс флюида или границу пласта, или на анизотропный падающий пласт примет следующий вид:

где Ai, Bi, и Ci являются комплексными коэффициентами, представляющими амплитуду напряжения зависящей от азимута двухпериодной синусоиды, однопериодной синусоиды и постоянного значения отклика приемника на излучение верхнего передатчика (i=1) или нижнего передатчика (i=2). Используя функцию подбора кривой, понятным образом для каждого отклика из необработанных измеренных напряжений сигнала можно получить три комплексных амплитуды напряжения. Эксперименты показывают, что если сравнивать коэффициенты отклика инструмента на близкорасположенную обсадную колонну с коэффициентами отклика инструмента на параметры окружающей среды, то коэффициент Ai отклика на обсадную колонну оказывается большим по магнитуде коэффициента Bi, в то время как для откликов на параметры окружающей среды обычно истинно обратное. И действительно, было обнаружено, что коэффициент Bi для отклика на обсадную колонну относительно мал по сравнению с коэффициентом Ai. Соответственно, предлагаемый инструмент обнаружения обсадной трубы для измерений с целью обнаружения и дальномерных измерений предпочтительно использует коэффициент Ai. Температурная компенсация и нормализация напряжения могут быть выполнены с использованием отношения  , и было обнаружено, что при моделировании работы инструмента полезно использовать логарифм этого отношения, например,
, и было обнаружено, что при моделировании работы инструмента полезно использовать логарифм этого отношения, например,  .
.
Для анализа отклика инструмента на (1) анизотропию пласта; (2) на близкорасположенную границу, и (3) на обсадную колонну будут рассмотрены три репрезентативные модели. На фиг. 3А показана первая модель, в которой инструмент расположен в относительно толстом падающем пласте, имеющем анизотропию электрического сопротивления. Горизонтальные составляющие электрического сопротивления (Rx и Ry) приняты за 1 Ом, а вертикальная составляющая электрического сопротивления (Rz) принята за 2 Ом. На фиг. 3В показана вторая модель, в которой инструмент находится в пласте с высоким электрическим сопротивлением (Rt=200 Ом) и приближается к границе с более проводящим пластом (Rt=1 Ом). Расстояние от инструмента до границы пластов (РГП) измеряется от принимающей антенны до ближайшей точки на границе. На фиг. 3С показана третья модель, в которой инструмент расположен на расстоянии d от обсадной колонны в гомогенном пласте.
Начиная с анизотропной модели, производится сравнение откликов инструмента для каждой из трех моделей. На фиг. 4А показаны результаты измерений, выполненных параллельной парой передающей и принимающей антенн (далее эти результаты называются «параллельным откликом»), расположенных на расстоянии 52 дюйма друг от друга, а на фиг. 4В показаны результаты измерений перпендикулярной парой передающей и принимающей антенн, расположенных на том же расстоянии друг от друга. В обоих случаях результаты измерений показаны в виде функции угла падения пласта и частоты передаваемого сигнала. Результаты измерений показаны в виде логарифма отношения коэффициентов, то есть как . Вообще говоря, более сильный отклик на анизотропную модель наблюдается на более высоких частотах сигнала. Кроме того, результаты измерений инструмента достаточно стабильны на углах падения пласта более 10 градусов, но резко снижаются на меньших углах падения пласта по мере того, как модель становится более симметричной относительно оси инструмента.
На фиг. 5А и 5В показаны отклики параллельной и перпендикулярной пар передающей-принимающей антенн инструмента на близкорасположенную границу пластов в виде функции угла падения пласта и удаления границы. Для этих графиков принимается, что расстояние между антеннами составляет 52 дюйма, а частота сигнала - 125 кГц. Отклик инструмента становится сильнее при приближении к границе пластов, а сигнал остается достаточно стабильным, пока углы падения пласта превышают примерно 10 градусов. Ниже этого значения модель становится более симметричной и величина результатов измерений резко уменьшается. Результаты измерения близкорасположенной границы пластов также показаны на фиг. 6А и фиг. 6В в виде функции частоты сигнала, и снова подтверждают, что величина отклика инструмента увеличивается с увеличением частоты, хотя и не так значительно, как в первой модели.
На фиг. 7А и 7В показаны отклики параллельной и перпендикулярной пар передающей-принимающей антенн инструмента на близкорасположенную обсадную трубу в виде функции удаления обсадной трубы и частоты сигнала при расстоянии между антеннами 44 дюйма. На фиг. 8А и 8В показаны ожидаемые отклики инструмента с расстоянием между антеннами 52 дюйма. Эти отклики представляют результаты реальных опытов в водяном баке, заполненном водой с сопротивлением 1 Ом, представляющей гомогенный изотропный пласт. Инструмент был расположен в центре бака, а обсадная труба - параллельно инструменту на удалении, которое изменяли произвольно в диапазоне от 0,85 фута до 6 футов. Полученные результаты показывают увеличение силы сигнала при уменьшении его частоты. Хотя данный тренд и не является монотонным и немного меняется на обратный при более низких частотах сигнала (смотри фиг. 12А - фиг. 12В), ожидается, что разница между откликом инструмента на обсадную трубу и на другие факторы окружающей среды будет более явной при снижении частоты сигнала. В значительной мере, использование более низких частот сигнала также делает практически осуществимой работу инструмента при увеличенном расстоянии между антеннами.
На фиг. 9А и 9В показаны отклики параллельной и перпендикулярной пар передающей-принимающей антенн инструмента в виде функции удалении обсадной трубы для различных расстояний между антеннами при частоте сигнала 500 кГц. По графику наблюдается, что сила отклика инструмента на сигнал увеличивается при увеличении расстояния между антеннами. Сравнивая отклики инструмента на каждую из моделей, можно сделать вывод о том, что для инструмента для обнаружения обсадной трубы будет лучше, если он будет работать на меньшей частоте и/или при большем расстоянии между передатчиком и приемником, так как при этом повышается чувствительность инструмента к близкорасположенной обсадной трубе при одновременном ослаблении отклика инструмента на анизотропию пласта и близкорасположенные прилегающие пласты.
С другой стороны, при уменьшении частоты возникает пара проблем. Прежде всего, при неизменных других параметрах (том же расстоянии между антеннами, той же конструкции антенн) при уменьшении частоты уменьшается амплитуда сигнала, получаемого на приемнике инструмента. Для очень слабой амплитуды сигнала возникнут проблемы уровня шума или отношения сигнал-шум. Во-вторых, при работе на низкой частоте сигнал, полученный на приемнике, большей частью будет являться прямым сигналом, передаваемым непосредственно с передатчика на приемник. Если прямой сигнал будет значительно сильнее сигнала от обсадной трубы, то могут перестать работать схемы обработки информации с целью обнаружения обсадной трубы, расположенной близко к инструменту. Из вышесказанного следует вывод, что для обнаружения близкорасположенной обсадной трубы лучше уменьшать рабочую частоту, но оптимальная рабочая частота, а также оптимальное расстояние между передатчиком и приемником будут определяться электрическим сопротивлением пласта и удалением обсадной трубы от инструмента.
Для лучшего количественного определения принципов, которые можно применить в оптимизационном анализе, в качестве примера рассмотрим электромагнитный каротажный инструмент, помещенный в гомогенный изотропный пласт с удельным электрическим сопротивлением 500 Ом·м, в котором обсадная труба расположена параллельно на удалении 10 футов, как показано на фиг. 10. Чувствительность инструмента к обсадной трубе может определяться путем измерения относительной силы сигнала, который считается приходящим от обсадной трубы. Сигнал от обсадной трубы становится максимальным, когда антенны ориентированы вдоль оси у, как показано на фиг. 10, так как при такой ориентации в обсадной трубе индуцируется максимальный ток и обеспечивается максимальная чувствительность к полям, индуцируемым этим током. Комплексная амплитуда составляющей сигнала, измеренной при такой ориентации передатчика и приемника, обозначена здесь как  . Тогда чувствительность инструмента может быть выражена через сравнение относительно силы моделируемого сигнала
. Тогда чувствительность инструмента может быть выражена через сравнение относительно силы моделируемого сигнала  в присутствии и отсутствии обсадной трубы:
в присутствии и отсутствии обсадной трубы:

Где:
Sensitivity - чувствительность
Signal - сигнал
With casing - в присутствии обсадной трубы
No casing - в отсутствии обсадной трубы.
На фиг. 11А чувствительность показана в виде функции расстояния между антеннами и частоты сигнала. На фиг. 11В снова в виде функции расстояния между антеннами и частоты сигнала показана немасштабированная амплитуда  сигнала в присутствии обсадной трубы. Разработчик инструмента может использовать эти иллюстрации вместе с иллюстрациями фиг. 12А и 12В, на которых показаны смоделированные отклики log10(A/C) для параллельной и перпендикулярной пар передающей-принимающей антенн Tx-Rx, показанных на фиг. 2, для того же диапазона частот сигнала и расстояний между антеннами, что и на фиг. 11А и 11В. Совокупно эти иллюстрации могут быть использованы разработчиками антенн для выбора оптимизированных частоты и расстояния между антеннами для реализации электромагнитного инструмента, адаптированного специально для обнаружения обсадной трубы, находящей в пласте с удельным сопротивлением 50 Ом·м на удалении до 10 футов.
сигнала в присутствии обсадной трубы. Разработчик инструмента может использовать эти иллюстрации вместе с иллюстрациями фиг. 12А и 12В, на которых показаны смоделированные отклики log10(A/C) для параллельной и перпендикулярной пар передающей-принимающей антенн Tx-Rx, показанных на фиг. 2, для того же диапазона частот сигнала и расстояний между антеннами, что и на фиг. 11А и 11В. Совокупно эти иллюстрации могут быть использованы разработчиками антенн для выбора оптимизированных частоты и расстояния между антеннами для реализации электромагнитного инструмента, адаптированного специально для обнаружения обсадной трубы, находящей в пласте с удельным сопротивлением 50 Ом·м на удалении до 10 футов.
Например, фиг. 11А показывает, что 100% чувствительность может быть получена, например, с частотой передаваемого сигнала 100 кГц и расстоянием между антеннами порядка 35 футов; с частотой передаваемого сигнала 10 кГц и расстоянием между антеннами порядка 40 футов; с частотой передаваемого сигнала 1 кГц и расстоянием между антеннами порядка 50 футов. Фиг. 11В показывает, что амплитуда составляющей сигнала, которую можно отнести к обсадной трубе, для этих значений составляет достаточно большую величину порядка - 4,2, - 5,5, и - 6,8 соответственно. Если разработчик перенесет эти значения (100 кГц на 35 футах, 10 кГц на 40 футах и 1 кГц на 50 футах) на фиг. 12А и 12В, он увидит, что ожидаемые масштабированные отклики инструмента превысят - 0,5.
Так как удельное сопротивление пласта принято довольно большим (50 Ом·м), эффекты анизотропии пласта будут пренебрежимо малыми по сравнению с эффектами прилегающих пластов. Разработчик оценивает отклик на прилегающие пласты с выбранными параметрами инструмента. На фиг. 13А и 12В показаны моделированные отклики на прилегающие пласты, когда передающий сигнал частотой 1 кГц инструмент с расстоянием между антеннами 50 футов помещен в пласт с удельным сопротивлением 50 Ом·м на некотором удалении от границы с пластом, имеющим удельное сопротивление 1 Ом·м. Отклик показан в виде функции удаления от границы пласта и угла падения пласта. Фиг. 13А и 13В демонстрируют, что самый высокий сигнал log10(А/С) от границы пласта составляет менее - 1, что является подтверждением того, что инструмент способен точно обнаруживать параллельную обсадную трубу на удалении 10 футов от инструмента в пласте с удельным сопротивлением 50 Ом·м, не обращая внимания на влияние прочих эффектов пласта, таких как анизотропия и/или граница с прилегающими пластами.
На фиг. 14 в показана блок-схема иллюстративного способа обнаружения обсадной трубы. Иллюстративный способ начинается с получения результатов измерений сопротивления из первого ствола, что показано блоком этапа 1002. Затем первый ствол обсаживают либо как-то иначе придают ему проводимость (например, заполняя его проводящей жидкостью). В ситуациях, когда обсаженная скважина уже существует, но для нее отсутствуют данные каротажа сопротивления, можно оценить сопротивление пласта вокруг обсаженной скважины, используя другую информацию, например, данные по другим скважинам, данные сейсморазведки и модели коллектора. Данные сопротивления пласта, содержащего первый ствол, затем могут быть использованы на этапе 1004 для прогнозирования уровней сигналов окружающей среды, которые могут встретиться второму стволу, который бурят вблизи первого ствола. По результатам измерения сопротивления, вдоль по траектории второго ствола в виде функции расстояния между антеннами и частоты передаваемого сигнала можно определить отклик моделируемого инструмента на эффекты окружающей среды, такие как анизотропия сопротивления и присутствие границ с близкорасположенным пластом или интерфейса флюида.
Затем данные сопротивления могут быть применены на этапе 1006 для моделирования уровня сигнала отклика инструмента на присутствие обсадной трубы в виде функции расстояния между антеннами и рабочей частоты. В качестве части процесса моделирования может быть использован верхний предел желательного диапазона обнаружения обсадной трубы. На этапе 1008 отклик на обсадную трубу можно сравнить с уровнями сигналов от окружающей среды для того, чтобы определить диапазон приемлемых расстояний между антеннами и диапазон пригодных рабочих частот. Диапазон может быть задан в виде комбинации расстояния и частоты, обеспечивающей, чтобы сигнал от обсадной трубы был сильнее ожидаемого сигнала отклика инструмента на окружающую среду, а в некоторых случаях - сильнее по меньшей мере на порядок величины. Такая значительная разница позволит выполнять измерения расположения обсадной трубы, игнорируя отклики инструмента на эффекты окружающей среды. На этапе 1010 обеспечивается инструмент с наклонными антеннами, имеющий расстояние между антеннами и рабочую частоту из диапазона приемлемых величин. Выбор величин может выполняться по существующим инструментам или по допустимым конфигурациям инструмента. Например, для гарантирования адекватного отклика приемника, аппаратной части существующего инструмента может потребоваться некоторая минимальная сила сигнала, и этот фактор может исключить из выбора некоторые комбинации расстояния между антеннами и частоты сигнала. В другом примере некоторые инструменты с наклонными антеннами могут иметь модульную конструкцию, в которой передающий модуль может находиться на регулируемом удалении от принимающего модуля, что дает возможность перенастройки расстояния между антеннами в определенных пределах. Или же имеющиеся инструменты с наклонными антеннами могут иметь программируемый диапазон рабочей частоты или могут использовать несколько частот, в том числе по меньшей мере одну частоту в желательном рабочем диапазоне.
Специалистам в данной области техники указанные и иные варианты и модификации осуществления станут понятны после того, как раскрытие будет полностью понято ими. Предполагается, что приведенная ниже формула изобретения будет интерпретирована как охватывающая все таковые варианты и модификации.

Изобретение относится к средствам для направленного бурения скважин, в частности к электромагнитным каротажным средствам при параллельном бурении скважин. Техническим результатом является повышение качества получаемых сигналов при определении местонахождения второго ствола скважины относительно первого, за счет оптимизации расстояния передатчик-приемник и рабочей частоты каротажного инструмента. Предложен способ промысловых геофизических исследований для бурения второго ствола в определенной позиции относительно первого ствола в пласте с высоким электрическим сопротивлением, включающий в себя: получение результатов измерения сопротивления пласта из первого ствола; определение ожидаемого уровня сигнала окружающей среды для второго ствола, находящегося в определенной позиции относительно первого ствола, по меньшей мере, частично по результатам измерений сопротивления пласта; сравнение уровня сигнала обнаружения для первого ствола с ожидаемым уровнем сигнала окружающей среды, чтобы определить диапазон приемлемых величин расстояния передатчик-приемник и рабочей частоты, обеспечивающий превышение ожидаемого уровня сигнала окружающей среды уровнем сигнала обнаружения для первого ствола; выбор, по меньшей мере, одной из величин расстояния передатчик-приемник и рабочей частоты из определенного диапазона и обеспечение в компоновке низа бурильной трубы второго ствола каротажного инструмента с наклонными антеннами, имеющего выбранное расстояние между антеннами и/или рабочую частоту. Раскрыт также инструмент для осуществления указанного способа. 2 н. и 17 з.п. ф-лы, 25 ил.
1. Способ промысловых геофизических исследований для бурения второго ствола в определенной позиции относительно первого ствола в пласте с высоким электрическим сопротивлением, включающий в себя:
получение результатов измерения сопротивления пласта из первого ствола;
определение ожидаемого уровня сигнала окружающей среды для второго ствола, находящегося в определенной позиции относительно первого ствола, по меньшей мере, частично по результатам измерений сопротивления пласта;
сравнение уровня сигнала обнаружения для первого ствола с ожидаемым уровнем сигнала окружающей среды, чтобы определить диапазон приемлемых величин расстояния передатчик-приемник и рабочей частоты, обеспечивающий превышение ожидаемого уровня сигнала окружающей среды уровнем сигнала обнаружения для первого ствола;
выбор, по меньшей мере, одной из величин расстояния передатчик-приемник и рабочей частоты из определенного диапазона, и
обеспечение в компоновке низа бурильной трубы второго ствола каротажного инструмента с наклонными антеннами, имеющего выбранное расстояние между антеннами и/или рабочую частоту.
2. Способ по п. 1, в котором желательный уровень сигнала обнаружения менее чем в десять раз выше ожидаемого уровня сигнала окружающей среды.
3. Способ по п. 1, в котором первый ствол обсаживают перед бурением второго ствола.
4. Способ по п. 1, в котором каротажный инструмент с наклонными антеннами содержит антенные модули, которые могут быть разделены изменяемым количеством промежуточных переводников.
5. Способ по п. 1, в котором каротажный инструмент с наклонными антеннами имеет программируемую рабочую частоту.
6. Способ по п. 1, в котором ожидаемый уровень сигнала окружающей среды включает в себя зависимость азимутального сигнала, относимую к анизотропии пласта.
7. Способ по п. 1, в котором ожидаемый уровень сигнала окружающей среды включает в себя зависимость азимутального сигнала, относимую к интерфейсу флюида пласта или к границе между пластами.
8. Способ по п. 1, в котором ожидаемый уровень сигнала окружающей среды включает в себя зависимость азимутального сигнала, относимую к эффекту ствола.
9. Способ по п. 1, в котором определение ожидаемого уровня сигнала окружающей среды включает в себя генерирование отклика модели на основе подбираемых расстояния передатчик-приемник и рабочей частоты.
10. Способ по п. 9, в котором указанное сравнение включает в себя:
определение отклика модели на сигнал обнаружения обсадной трубы по подбираемым расстоянию передатчик-приемник и рабочей частоте; и
систематическое варьирование подбираемых расстояния передатчик-приемник и рабочей частоты до тех пор, пока моделируемый сигнал обнаружения обсадной трубы не превысит уровня моделируемого сигнала окружающей среды.
11. Инструмент для обнаружения обсадных труб, предназначенный для использования при бурении второго ствола в определенной позиции относительно первого ствола в пласте с высоким электрическим сопротивлением, имеющий:
по меньшей мере одну наклонную антенну передатчика, излучающую передаваемый сигнал; и
по меньшей мере две или более наклонных антенны приемника, обнаруживающих составляющие индуцированного магнитного поля,
отличающийся тем, что антенны приемника удалены от антенны передатчика по меньшей мере на выбранное расстояние между антеннами,
причем передаваемый сигнал имеет по меньшей мере одну частотную составляющую на выбранной рабочей частоте или ниже нее, и при этом обеспечен выбор расстояния между антеннами и рабочей частоты на основании сравнения уровня сигнала обнаружения для первого ствола с ожидаемым уровнем сигнала окружающей среды для пласта, чтобы определить диапазон приемлемых величин расстояния передатчик-приемник и рабочей частоты, обеспечивающий превышение ожидаемого уровня сигнала окружающей среды уровнем сигнала обнаружения для первого ствола.
12. Инструмент по п. 11, в котором ожидаемый уровень сигнала окружающей среды включает в себя по меньшей мере одну из зависимостей: от анизотропии пласта, от интерфейса флюида пласта, от границы пластов и от эффекта ствола скважины.
13. Инструмент по п. 11, в котором ожидаемый уровень сигнала обнаружения обсадной трубы основывается на заданном диапазоне обнаружения и на электрическом сопротивлении пласта.
14. Инструмент по п. 11, в котором выбранное расстояние между антеннами превышает примерно 35 футов, а выбранная рабочая частота составляет менее примерно 100 кГц.
15. Инструмент по п. 14, в котором выбранное расстояние между антеннами превышает примерно 40 футов, а выбранная рабочая частота составляет менее примерно 10 кГц.
16. Инструмент по п. 15, в котором выбранное расстояние между антеннами превышает примерно 50 футов, а выбранная рабочая частота составляет менее примерно 1 кГц.
17. Инструмент по п. 11, в котором передаваемый сигнал имеет программируемую рабочую частоту.
18. Инструмент по п. 11, в котором инструмент для обнаружения обсадных труб между антенной передатчика и по меньшей мере одной антенной приемника имеет некоторое количество промежуточных переводников, причем это количество может варьироваться для обеспечения по меньшей мере одного выбранного расстояния между антеннами.
19. Инструмент по п. 11, также содержащий процессор, собирающий результаты измерений на множестве расстояний передатчик-приемник.
| US 20110006773 A1, 13.01.2011 | |||
| US 20090309600 A1, 17.12.2009 | |||
| US 20070137854 A1, 21.06.2007 | |||
| УСТРОЙСТВО ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ (ВАРИАНТЫ), СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ, УЗЕЛ СОЛЕНОИДА УСТРОЙСТВА ИЗМЕРЕНИЯ РАССТОЯНИЯ И ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕЖДУ ДВУМЯ БУРОВЫМИ СКВАЖИНАМИ | 2007 |
|
RU2468200C2 |
| ОПРЕДЕЛЕНИЕ РАССТОЯНИЯ МАГНИТНЫМИ СРЕДСТВАМИ ПРИ БУРЕНИИ ПАРАЛЛЕЛЬНЫХ СКВАЖИН | 2007 |
|
RU2436924C2 |
| СИСТЕМА КОНТРОЛЯ ПРОЦЕССА ВЗАИМНОГО ОРИЕНТИРОВАНИЯ СТВОЛОВ ПРИ КУСТОВОМ БУРЕНИИ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 2009 |
|
RU2405106C1 |
| Отбойка для погонялки ткацкого станка | 1927 |
|
SU7587A1 |

