Изобретение относится к электротехнике, в частности к электроприводам переменного тока периодического движения, и может быть использовано при создании вибрационных электроприводов для перемешивания сыпучих, пастообразных и жидких веществ.
Известен электропривод колебательного движения [RU 107650 U1, МПК H02P 25/02 (2006.01), Н02Р 27/04 (2006.01), H02K 33/04 (2006.01), опубл. 20.08.2011], содержащий двухфазный асинхронный двигатель, обмотка возбуждения которого подключена к источнику переменного тока, преобразователь напряжение-частота, инвертор, выход которого соединен с обмоткой управления двухфазного асинхронного двигателя, частотный демодулятор, прецизионный регулируемый блок питания постоянного напряжения, функциональный преобразователь, фазовращатель, фазовый детектор, ключ и сумматор. Выход сумматора соединен с входом преобразователя напряжение-частота. Выход прецизионного регулируемого блока питания постоянного напряжения подключен к первому входу сумматора, второй вход которого соединен с выходом частотного демодулятора. Вход частотного демодулятора снабжен зажимами для подключения к источнику переменного тока. Ключ соединен первым входом с выходом преобразователя напряжение-частота, вторым входом - с выходом функционального преобразователя, а третьим входом - с выходом фазового детектора. Выход ключа подключен к входу инвертора. Первый вход фазового детектора соединен с выходом фазовращателя, вход которого соединен с выходом преобразователя напряжение-частота. Второй вход фазового детектора подключен к источнику переменного тока. Вход функционального преобразователя подключен к выходу прецизионного регулируемого блока питания постоянного напряжения.
Данное техническое решение выбрано в качестве прототипа.
Однако несмотря на то что в данном электроприводе формируется режим мягкого периодического реверса и обеспечивается как высокая стабильность по частоте колебаний, так и безударный пуск по электромагнитному моменту в заданном диапазоне изменения частоты колебаний, он не позволяет формировать колебательно-вращательный режим работы подвижного элемента привода.
Задачей изобретения является расширение эксплуатационных возможностей электропривода за счет формирования колебательно-вращательного режима работы с регулируемыми параметрами движения.
Поставленная задача решена за счет того, что электропривод колебательно-вращательного движения так же, как в прототипе, содержит двухфазный асинхронный двигатель, обмотка возбуждения которого подключена к источнику переменного тока, преобразователь напряжение-частота, инвертор, выход которого соединен с обмоткой управления двухфазного асинхронного двигателя, частотный демодулятор, прецизионный регулируемый блок питания постоянного напряжения и сумматор, выход которого соединен с входом преобразователя напряжение-частота. Выход прецизионного регулируемого блока питания постоянного напряжения подключен к первому входу сумматора, второй вход которого соединен с выходом частотного демодулятора. Вход частотного демодулятора снабжен зажимами для подключения к источнику переменного тока.
Согласно изобретению в электропривод введены фазовое звено и второй сумматор. Первый вход второго сумматора соединен с выходом преобразователя напряжение-частота, а второй вход второго сумматора соединен с выходом фазового звена. Выход второго сумматора соединен с входом инвертора напряжения. Вход фазового звена подключен к источнику переменного тока.
Использование фазового звена и второго сумматора позволяет создать колебательно-вращательный режим работы электропривода с регулируемыми выходными параметрами и тем самым расширить эксплуатационные возможности известного устройства.
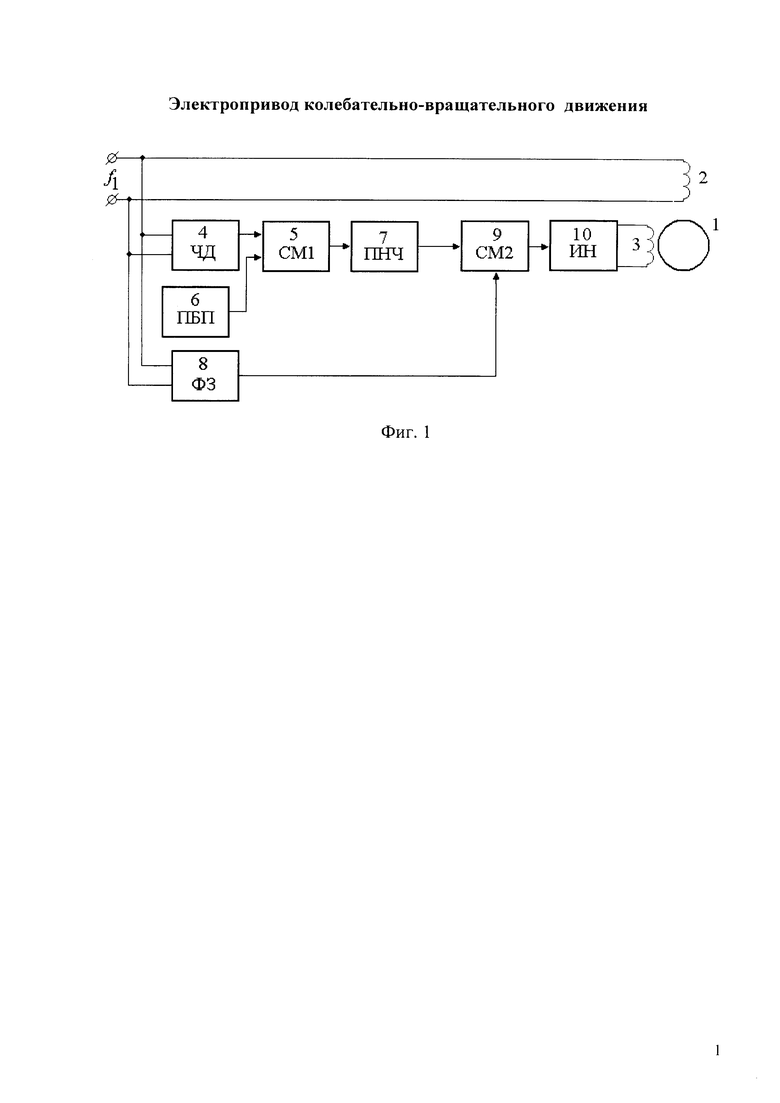
На фиг. 1 представлена блок-схема заявляемого устройства.
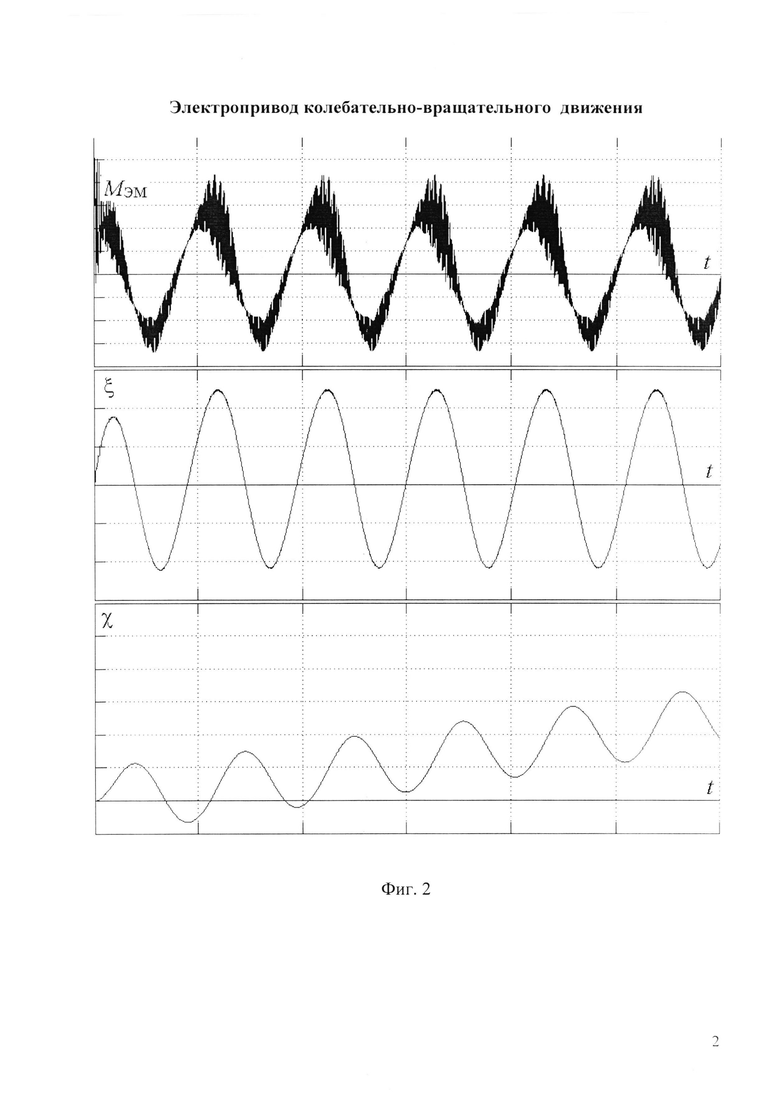
На фиг. 2 представлены временные диаграммы изменения координаты подвижного элемента асинхронного двигателя χ(t), электромагнитного момента Мэм(t) и скорости ξ(t) при запуске на частоту Ω заявляемого устройства.
Электропривод колебательно-вращательного движения (фиг. 1) состоит из асинхронного двигателя 1 с обмотками возбуждения 2 и управления 3, частотного демодулятора 4 (ЧД), первого сумматора 5 (СМ1), прецизионного регулируемого блока питания постоянного напряжения 6 (ПБП), преобразователя напряжение-частота 7 (ПНЧ), фазового звена 8 (ФЗ), второго сумматора 9 (СМ2), инвертора напряжения 10 (ИН).
Обмотка возбуждения 2 асинхронного двигателя 1 снабжена клеммами и подключена к источнику переменного тока частоты f1, а обмотка управления 3 - к выходу инвертора напряжения 10 (ИН). Выход первого сумматора 5 (СМ1) соединен с входом преобразователя напряжение-частота 7 (ПНЧ). Первый вход первого сумматора 5 (СМ1) подключен к выходу прецизионного регулируемого блока питания постоянного напряжения 6 (ПБП), а второй вход - к выходу частотного демодулятора 4 (ЧД). Вход частотного демодулятора 4 (ЧД) подключен к источнику переменного тока частоты f1. Второй сумматор 9 (СМ2) соединен первым входом с выходом преобразователя напряжение-частота 7 (ПНЧ), а вторым входом - с выходом фазового звена 8 (ФЗ). Вход фазового звена 8 (ФЗ) подключен к источнику переменного тока частоты f1. Выход второго сумматора 9 (СМ2) соединен с входом инвертора напряжения 10 (ИН).
При технической реализации макетного образца заявляемого устройства частотный демодулятор 4 (ЧД) и преобразователь напряжение-частота 7 (ПНЧ) были выполнены на микросхеме КР 11081ПП1. В качестве сумматоров 5 (СМ1) и 9 (СМ2) использовались операционные усилители серии К140УД17. Прецизионный регулируемый блок питания постоянного напряжения 6 (ПБП) был выполнен на основе стабилизатора компенсационного типа, обладающего малым коэффициентом пульсаций и высокой температурной стабильностью. Фазовое звено 8 (ФЗ) было выполнено как фазовое звено первого порядка на операционном усилителе К140УД6 и понижающем трансформаторе. В качестве инвертора напряжения 10 (ИН) использовался мостовой инвертор с транзисторными ключами.
Электропривод колебательно-вращательного движения работает следующим образом. Обмотка возбуждения 2 двухфазного асинхронного двигателя 1 подключена к источнику переменного тока частоты f1
U2=Um1cos(2·π·f1·t+α),
где Um1 - амплитуда напряжения источника переменного тока частоты f1;
α - начальная фаза напряжения источника переменного тока;
t - текущее значение времени,
а обмотка управления 3 подключена к выходу инвертора напряжения 10 (ИН).
Напряжение с выхода источника переменного тока частоты f1 поступает на вход фазосдвигающего звена 8 (ФЗ), где оно сдвигается по фазе относительно входного напряжения на ±90 градусов
U8=k8·Um1·cos(2·π·f1·t+α±π/2)=±k8·Um1·sin(2·π·f1·t+α),
где k8 - коэффициент передачи фазосдвигающего звена 8 (ФЗ),
и подается на второй вход второго сумматора 9 (СМ2).
Одновременно напряжение с выхода источника переменного тока частоты f1 поступает на вход частотного демодулятора 4 (ЧД), с выхода которого снимается постоянное напряжение, пропорциональное по величине частоте источника переменного тока f1
U4=k4·f1,
где k4 - коэффициент передачи частотного демодулятора 4 (ЧД).
Напряжение с выхода прецизионного регулируемого блока питания постоянного напряжения 6 (ПБП), пропорциональное частоте колебаний fк подвижного элемента электропривода
U6=k6·fк,
где k6 - коэффициент пропорциональности регулируемого блока питания постоянного напряжения 6 (ПБП),
поступает на первый вход первого сумматора 5 (СМ1).
На второй вход первого сумматора 5 (СМ1) поступает напряжение с выхода частотного демодулятора 4 (ЧД) U4.
Полученное напряжение в результате сложения на первом сумматоре 5 (СМ1) напряжений U4 и U6 преобразуется преобразователем напряжение-частота 7 (ПНЧ) в переменное напряжение с частотой f2
U7=Um2sin(2πf2t+β),
где Um2 - амплитуда выходного напряжения преобразователя напряжение-частота 7 (ПНЧ);
f2=k7(k4·f1+k6·fк);
k7 - коэффициент пропорциональности преобразователя напряжение частота 7 (ПНЧ).
Сформированное напряжение U7 поступает на первый вход второго сумматора 9 (СМ2) и складывается в нем с напряжением U8
U9=[Um2·sin(2·π·f2·t+β)±k8·Um1·sin(2·π·f·t+α)].
Суммарное напряжение с выхода второго сумматора поступает на управляющий вход инвертора напряжения 10 (ИН).
Инвертор напряжения 10 (ИН) усиливает входной сигнал по мощности и запитывает обмотку управления 3 асинхронного двигателя напряжением
U10=k10[Um2·sin(2·π·f2·t+β)±k8·Um1·sin(2·π·f·t+α)],
где k10 - коэффициента передачи инвертора напряжения 10 (ИН).
В результате в воздушном зазоре асинхронного двигателя формируется электромагнитное поле, имеющее две составляющие:
- колебательную, от взаимодействия напряжений
Um1cos(2·π·f1·t+α) и Um2·sin(2·π·f2·t+β);
- вращательную, от взаимодействия напряжений
Um1cos(2·π·f1·t+α) и ±Um3·sin(2·π·f1·t+α),
где Um3=k8Um1,
благодаря чему подвижный элемент асинхронного двигателя начинает совершать колебательно-вращательное движение. На фиг. 2 представлены временные диаграммы, иллюстрирующие согласно заявляемому устройству законы изменения момента M(t), скорости ξ(t) и координаты χ(t) подвижного элемента асинхронного двигателя 1.
Точность задания и поддержания частоты колебаний fк определяется стабильностью прецизионного регулируемого блока питания постоянного напряжения 6 (ПБП). Скорость вращательной составляющей закона движения подвижного элемента двигателя регулируется величиной коэффициента передачи фазового звена 8 (ФЗ), а направление движения - полярностью фазового сдвига фазового звена 8 (ФЗ). Регулирование амплитуды колебаний осуществляется за счет изменения амплитуды выходного напряжения Um2 преобразователя напряжение-частота 7 (ПНЧ).
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2017 |
|
RU2677682C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 2016 |
|
RU2636806C2 |
| ЭЛЕКТРОПРИВОД КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 1991 |
|
RU2028026C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХФАЗНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ В РЕЖИМЕ ПУЛЬСИРУЮЩЕГО ДВИЖЕНИЯ | 2015 |
|
RU2587545C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХФАЗНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ В РЕЖИМЕ ПУЛЬСИРУЮЩЕГО ДВИЖЕНИЯ | 2016 |
|
RU2640352C1 |
| Устройство для управления непосредственным преобразователем частоты | 1971 |
|
SU576654A1 |
| ЧАСТОТНЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2581629C1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ВЫСШИХ ГАРМОНИК, АДАПТИРОВАННОЕ К ЭЛЕКТРОПРИВОДУ ПЕРЕМЕННОГО ТОКА | 2016 |
|
RU2619919C1 |
Изобретение относится к электротехнике, в частности к электроприводам переменного тока периодического движения. Электропривод колебательно-вращательного движения содержит двухфазный асинхронный двигатель, обмотка возбуждения которого подключена к источнику переменного тока, а обмотка управления к выходу инвертора напряжения, преобразователь напряжение-частота, частотный демодулятор, прецизионный регулируемый блок питания постоянного напряжения, фазовое звено и два сумматора. Выход прецизионного регулируемого блока питания постоянного напряжения подключен к первому входу первого сумматора, второй вход которого соединен с выходом частотного демодулятора, вход которого подключен к источнику переменного тока, а выход соединен с входом преобразователя напряжение-частота. Выход преобразователя напряжение-частота подключен с первым входом второго сумматора, второй вход которого соединен с выходом фазового звена, а выход соединен с входом инвертора напряжения. Вход фазового звена подключен к источнику переменного тока. Технический результат состоит в обеспечении регулирования параметров движения колебательно-вращательного режима работы электропривода. 2 ил.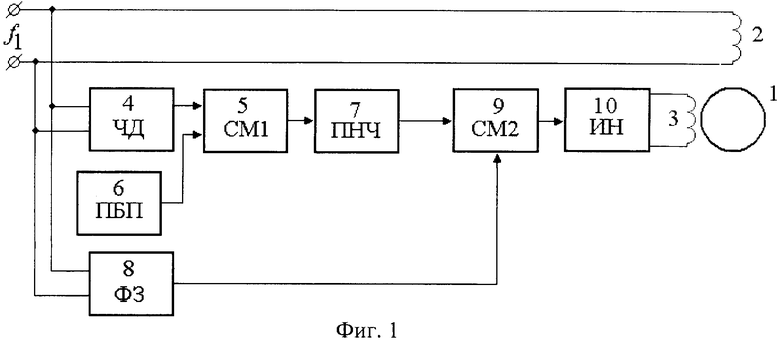
Электропривод колебательно-вращательного движения, содержащий двухфазный асинхронный двигатель, обмотка возбуждения которого подключена к источнику переменного тока, преобразователь напряжение-частота, инвертор, выход которого соединен с обмоткой управления двухфазного асинхронного двигателя, частотный демодулятор, прецизионный регулируемый блок питания постоянного напряжения и сумматор, выход которого соединен с входом преобразователя напряжение-частота, выход прецизионного регулируемого блока питания постоянного напряжения подключен к первому входу сумматора, второй вход которого соединен с выходом частотного демодулятора, вход которого снабжен зажимами для подключения к источнику переменного тока, отличающийся тем, что первый вход второго сумматора соединен с выходом преобразователя напряжение-частота, а второй вход второго сумматора соединен с выходом фазового звена, выход второго сумматора соединен с входом инвертора напряжения, вход фазового звена подключен к источнику переменного тока.
| Способ управления двухфазным асинхронным двигателем в режиме колебательного движения | 1987 |
|
SU1415400A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВУХФАЗНЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ В РЕЖИМЕ КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ | 1994 |
|
RU2082277C1 |
| ЭЛЕКТРОПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 1998 |
|
RU2148293C1 |
| Способ совместного получения алкилкарбонатов и формиатов щелочных металлов | 1961 |
|
SU144840A1 |
| JPS 60187290 A, 24.09.1985. | |||

