Областью изобретения является область пантографов для железнодорожных транспортных средств. Задачей изобретения является создание пантографа, имеющего улучшенные динамические характеристики.
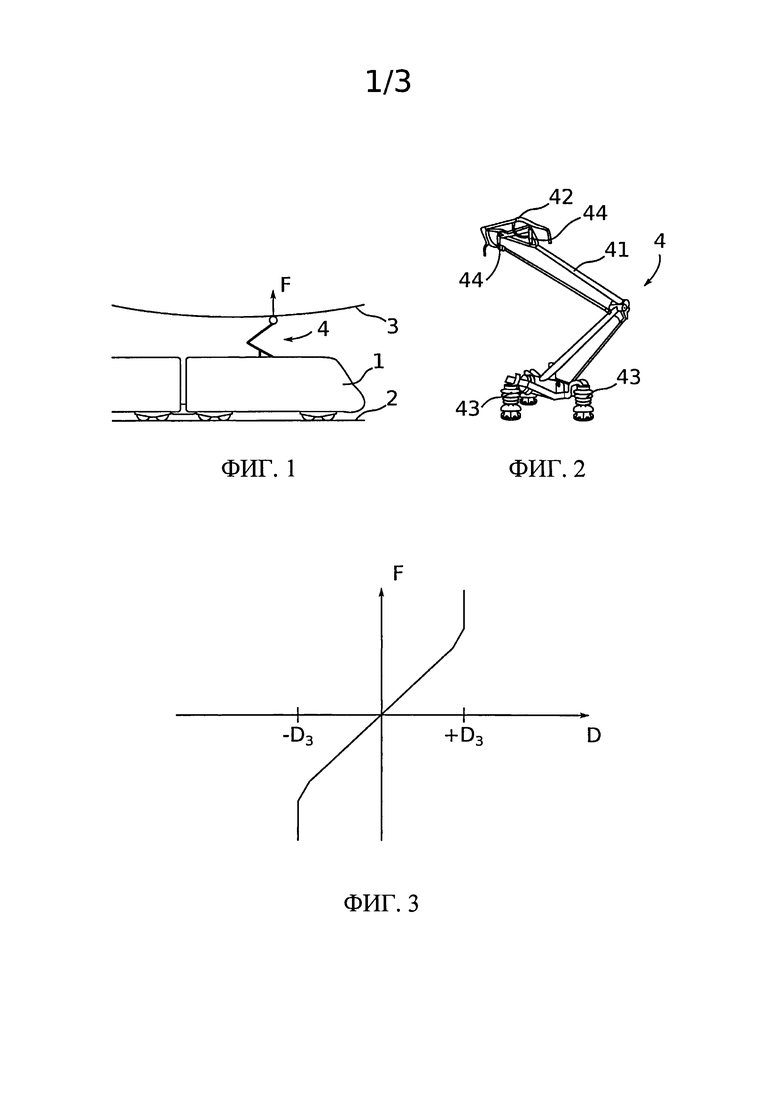
Как показано на фиг.1, железнодорожное транспортное средство 1 движется обычным образом по железнодорожным рельсам 2 и рассчитано на питание от контактной сети, включающей обычно вертикальные опоры, поддерживающие контактный провод 3, который простирается над рельсами 2 железной дороги. Опоры контактной сети разнесены с интервалом в дюжину, или около того, метров и опора поддерживает несущий трос, на котором при помощи маятников подвешен контактный провод 3. Пантограф 4 представляет собой устройство, которое установлено на крыше электровоза железнодорожного транспортного средства 1 для снятия электрического тока, протекающего через контактный провод 3 для питания электровоза электрической энергией, когда он движется по рельсам 2.
Под действием силы тяжести и из-за размещения точек подвески контактный провод 3 имеет форму цепной линии между маятниками, это означает, что высота между крышей электровоза железнодорожного транспортного средства 1 и контактным проводом 3 изменяется во время движения транспортного средства 1. Первой функцией пантографа 4 является компенсация изменения высоты, таким образом, чтобы пантограф 4 всегда находится в контакте с контактным проводом 3. Второй функцией пантографа 4 является приложение тарированной силы контакта F к контактному проводу 3 в зависимости от скорости железнодорожного транспортного средства 1, предусматривающей оптимальное снятие тока. С этой целью пантограф 4 имеет различные состояния подвески, такие, что сила контакта F пантографа 4 с контактным проводом 3 управляется таким образом, чтобы предотвратить любой перерыв токосъема (недостаточная сила контакта) или преждевременный износ контактного провода 3 контактной сети (чрезмерная сила контакта).
Как показано в качестве примера на фиг.2, пантограф 4 обычно содержит нижнюю часть, известную специалисту в данной области как основная рамка 41, основание которой соединено с крышей электровоза, и верхнюю часть, известную специалисту в данной области, как токоприемная дуга 42, которая соединена с основной рамкой 41 и предназначена для вступления в контакт с контактным проводом 3 контактной сети.
Пантограф 4 обычно содержит пневматическую подвеску 43 рамки, содержащую пневматический демпфер, который позволяет рамке 41 раскладываться и складываться на крыше электровоза. Пневматическая подвеска 43 рамки позволяет компенсировать изменения высоты контактного провода 3, который имеет большую амплитуду и низкую частоту, в диапазоне от 1 до 2 Гц. Таким образом, когда пневматическая подвеска 43 рамки приведена в действие, рамка 41 приподнимается и раскладывается для подведения токоприемной дуги 42 к контактному проводу 3 контактной сети. Обычно давление воздуха в пневматической подвеске 43 рамки зависит от скорости железнодорожного транспортного средства 1.
Токоприемная дуга 42 смонтирована на верхней части рамки 41 пантографа 4 с помощью двух подвесок токоприемной дуги, известных специалистам в данной области техники как пружинный блок 44. Например, в патентной заявке FR 2883809 А1 компании SNCF раскрыто устройство подвески токоприемной дуги, имеющее пружины. Пружинные блоки 44 формируют второе состояние подвески, которое позволяет компенсировать изменения высоты контактного провода 3, имеющие малую амплитуду и высокую частоту, более чем 10 Гц.
Пружинный блок 44 обычно проходит в вертикальном направлении и обычно имеет цилиндр блока, который жестко соединен с рамкой 41 пантографа 4, и поршень, который жестко соединен с токоприемной дугой 42 и установлен с возможностью поступательного движения внутри цилиндра. Поршень имеет стержень, который присоединен, с одной стороны, к токоприемной дуге 42, а с другой стороны, к круглой пластине, которая установлена внутри цилиндра и выполнена с возможностью вертикального поступательного перемещения между концами цилиндра. Концы цилиндра образуют упоры и им присвоены ссылочные позиции -D3, +D3 на фиг.3, показывающие силу контакта F токоприемной дуги 42 с контактным проводом 3 в соответствии с движением D поршня.
Для демпфирования движения токоприемной дуги 42 пластина поршня соединена с двумя механическими пружинами, имеющими высокий коэффициент упругости, около 3000 Н/м, которые находятся внутри цилиндра в предварительно напряженном состоянии. Как показано на фиг.3, пружинный блок 44 в соответствии с предшествующим уровнем техники, имеет нелинейный общий коэффициент жесткости, коэффициент жесткости соответствует наклону кривой силы контакта F на фиг.3. Как показано на фиг.3, коэффициент жесткости пружинного блока 44 изменяется в соответствии с движением поршня внутри цилиндра, между граничными позициями -D3, +D3, коэффициент жесткости пружинного блока 44 является ″кусочно-линейным″ в математическом смысле.
Чтобы гарантировать, что токоприемная дуга 42 снимает ток эффективно, необходимо рассчитать коэффициент жесткости пружинного блока 44 в соответствии со средней силой контакта, массой токоприемной дуги 42 и допустимым максимальным смещением (длина цилиндра) пружинного блока 44. В настоящее время общий коэффициент жесткости пружинных блоков 44 в соответствии с предшествующим уровнем техники является достаточно высоким для того, чтобы сила контакта F пантографа 4 соответствовала установленным стандартам и не допускала упора в торцы цилиндра. Такой высокий коэффициент жесткости имеет тот недостаток, что он вызывает сильное взаимодействие между рамкой 41 и токоприемной дугой 42 пантографа 4. Другими словами, при малом изменении высоты контактного провода 3 токоприемная дуга 42 и рамка 41 могут перемещаться одновременно, что приводит к недостаткам в отношении динамики.
Чтобы преодолеть этот недостаток, в FR 2 740 741 В1 предлагают ввести коррекцию пружины в виде постоянных магнитов, чтобы ограничить коэффициент жесткости пружинного блока и таким образом ослабить взаимодействие между рамкой и токоприемной дугой пантографа. На практике это решение трудно осуществить, так как постоянные магниты являются дорогими в производстве. Кроме того, погодные условия могут повлиять на их надежность.
Чтобы преодолеть по меньшей мере некоторые из этих недостатков, предлагается настоящее изобретение, касающееся пантографа для передачи электрической энергии между контактным проводом и железнодорожным транспортным средством, пантограф, содержащий по меньшей мере одну рамку, предназначен для установки на железнодорожном транспортном средстве, токоприемная дуга предназначена для вступления в контакт с контактным проводом и подвеска токоприемной дуги установлена между рамкой и указанной токоприемной дугой, пантограф отличается тем, что подвеска токоприемной дуги содержит по меньшей мере один пневматический привод.
Пневматический привод имеет упругость, равную нулю, предоставляя возможность эффективной компенсации низкоамплитудных колебаний токоприемной дуги без передачи их на рамку пантографа, рамка и токоприемная дуга, таким образом, не взаимосвязаны, при этом улучшаются динамические характеристики пантографа. Кроме того, пневматический привод хорошо препятствует вибрации и внешним условиям (дождь, мороз и т.д.), что позволяет использовать его в промышленном контексте.
Предпочтительно пневматический привод содержит цилиндр, который прикреплен к рамке, и поршень, который жестко соединен с токоприемной дугой и установлен с возможностью поступательного перемещения внутри цилиндра таким образом, чтобы разделить объем цилиндра между верхней пневматической камерой и нижней пневматической камерой, каждая пневматическая камера содержит сжатый газ, который демпфирует движение поршня.
Благодаря пневматическим камерам пневматический привод позволяет демпфировать колебания токоприемной дуги одинаково хорошо как при подъеме токоприемной дуги, так и при ее опускании.
Более предпочтительно, чтобы по меньшей мере одна из пневматических камер содержала механическую пружину для того, чтобы компенсировать среднеамплитудные колебания без передачи их на рамку пантографа, рамка и токоприемная дуга таким образом не взаимосвязаны, при этом улучшаются динамические характеристики пантографа. Предпочтительно, чтобы каждая пневматического камера содержала механическую пружину.
Предпочтительно указанная механическая пружина установлена в пневматической камере свободно, то есть без предварительного напряжения. Таким образом, поршень может свободно перемещаться внутри цилиндра, не влияя на жесткость механической пружины. Пневматический привод имеет, таким образом, несколько уровней жесткости. Предпочтительно, чтобы механические пружины были установлены свободно в каждой пневматической камере.
Предпочтительно указанные механические пружины имеют коэффициент жесткости от 500 до 1500 Н/м, предпочтительно равный 600 Н/м. Благодаря пневматическому демпфированию пружина предпочтительно имеет более низкий коэффициент жесткости, чем у обычного пружинного блока, коэффициент жесткости которого составляет около 3000 Н/м. Пружина с таким коэффициентом жесткости позволяет улучшить динамические характеристики пантографа посредством ослабления связи между токоприемной дугой и рамкой. Предпочтительно коэффициенты жесткости каждой механической пружины одинаковы. Предпочтительно малый коэффициент жесткости достигается без увеличения хода токоприемной дуги.
Предпочтительно по меньшей мере одна из указанных пневматических камер содержит по меньшей мере одно отверстие пневмопитания, предусмотренное в упомянутом цилиндре. Предпочтительно, чтобы каждый пневматический цилиндр содержал по меньшей мере одно отверстие пневмопитания, предусмотренное в цилиндре.
Согласно одному аспекту изобретения пневматическое давление в пневматическом приводе устанавливают таким образом, чтобы оказывать воздействие на контактный провод с заданной силой контакта. Предпочтительно, чтобы сила контакта устанавливалась посредством регулировки пневматического давления. Предпочтительно пневматическое давление зависит от скорости железнодорожного транспортного средства, и это позволяет улучшить токосъем.
Предпочтительно поршень находится в исходном положении в цилиндре при заданной силе контакта, пневматический привод предназначен для пневматического демпфирования перемещения поршня в области его исходного положения в заданном основном диапазоне перемещения. Таким образом, пневматический привод обеспечивает возможность пневматического демпфирования низкоамплитудных колебаний токоприемной дуги в области исходного положения. В этом диапазоне перемещения упругость равна нулю, что улучшает динамические характеристики пантографа.
Предпочтительно пневматический привод предназначен для пневматического и механического демпфирования перемещения поршня, которое не подпадает в определенный основной диапазон перемещения. Таким образом, поршень может свободно перемещаться внутри цилиндра в основном диапазоне без использования механической упругости, механическая упругость используется только для помощи пневматическому демпфированию. Пневматический привод, таким образом, имеет несколько уровней жесткости.
В соответствии с другим аспектом настоящего изобретения пантограф содержит пневматическую подвеску рамки, которая устроена так, чтобы перемещать рамку по отношению к железнодорожному транспортному средству, пантограф содержит первую пневматическую схему, которая соединяет пневматическую подвеску рамки с пневматическим приводом. Пневматическое питание механической подвески рамки можно успешно использовать для питания пневматического привода, это позволяет сделать пантограф более компактным. Очень выгодно, когда давление воздуха пневматической подвески рамки зависит от скорости движения железнодорожного транспортного средства, так как пневматический привод использует эту зависимость.
Предпочтительно, поскольку блок содержит пневматический датчик удара, пантограф содержит вторую пневматическую схему, которая соединяет пневматический датчик удара с пневматическим приводом. Участок существующей пневматической схемы питания используют для питания пневматического привода, отводя его, таким образом, от его основной функции. Таким образом, можно оптимизировать существующие пантографы, ограничивая количество доработок конструкции.
Изобретение станет более понятным при изучении нижеследующего описания, приведенного только в качестве примера и со ссылками на прилагаемые чертежи, на которых:
- Фиг.1 представляет собой схематическое изображение железнодорожного транспортного средства, движущегося по рельсам железной дороги, пантограф установлен на крыше транспортного средства;
- Фиг.2 представляет собой вид в перспективе пантографа согласно предшествующему уровню техники;
- Фиг.3 показывает изменение силы контакта токоприемной дуги пантографа с контактным проводом контактной сети в соответствии с предшествующим уровнем техники в соответствии с вертикальным перемещением токоприемной дуги;
- Фиг.4 представляет собой схематическое изображение пантографа согласно изобретению;
- Фиг.5а представляет собой схематический поперечный разрез подвески токоприемной дуги пантографа согласно изобретению;
- Фиг.5b показывает изменение упругости указанной пневматической подвески в соответствии с вертикальным перемещением токоприемной дуги; и
- Фиг.6 представляет собой схематический поперечный разрез другого варианта подвески токоприемной дуги.
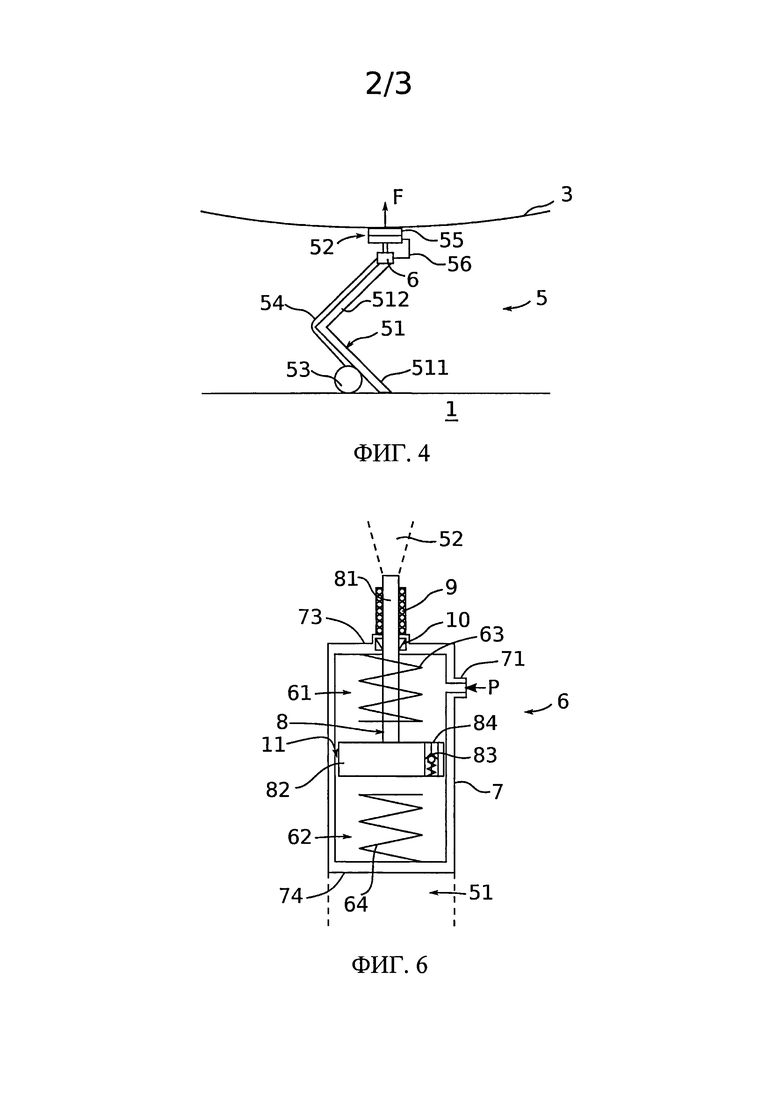
Как показано на фиг.4, пантограф 5 в соответствии с изобретением содержит рамку 51, которая установлена на крыше электровоза железнодорожного транспортного средства 1, и токоприемную дугу 52, которая соединена с указанной рамкой 51 и находится в контакте с контактным проводом 3 контактной сети, простирающимся над рельсами железной дороги, по которым перемещается железнодорожное транспортное средство 1. В этом примере рамка 51 пантографа 5 является шарнирной и содержит нижнюю часть 511, известную как ″основная рамка″, и верхнюю часть 512, известную как ″вспомогательная рамка″. Такая рамка 51 пантографа 5 является обычной и известна специалистам в данной области техники.
Токоприемник 5 содержит пневматическую подвеску 53 рамки, который в данном случае представляет собой пневматическую подушку 53, выполненную с возможностью складывать и раскладывать рамку 51 пантографа 5 по отношению к крыше железнодорожного транспортного средства 1. Пневматическая подвеска рамки 53 позволяет компенсировать изменения высоты между крышей железнодорожного транспортного средства 1 и контактным проводом 3 контактной сети, которые имеют большие амплитуды и низкие частоты (в области от 1 до 2 Гц). Пневматическое давление в пневматической подушке 53 предпочтительно зависит от скорости железнодорожного транспортного средства 1, так что сила контакта F пантографа 5 с контактным проводом 3 становится больше по мере увеличения скорости в соответствии с действующими стандартами. Например, текущие стандарты определяют среднюю силу контакта Fmoy пантографа 5 с контактным проводом в районе 150 Н при скорости 300 км/час.
Как показано на фиг.4, токоприемник 5 содержит подвеску токоприемной дуги, которая соединяет токоприемную дугу 52 с верхней частью рамки 51, для компенсации отклонений малой амплитуды и высокой частоты, то есть выше 10 Гц. Подвеска токоприемной дуги согласно изобретению представлена в виде двух пневматических приводов 6, каждый пневматический привод 6 занимает столько же места, сколько и пружинный блок в соответствии с предшествующим уровнем техники, для возможности монтажа пневматических приводов на существующих пантографах вместо существующих пружинных блоков.
В этом примере пантограф 5 содержит первую пневматическую схему питания 54, которая соединяет пневматические приводы 6 с пневматической подушкой 53. Таким образом, для того, чтобы управлять пневматическим давлением Р в пневматических приводах 6, используют существующие взаимосвязи для пневматической подушки 53. С этой целью первая схема пневматического питания 54 может включать в себя клапан, понижающий давление (не показан), для того, чтобы адаптировать давление в пневматической подушке 53 с давлением Р пневматического привода 6.
Предпочтительно токоприемная дуга 52 содержит пневматический датчик удара 55 (фиг.4), который выполнен с возможностью складывать пантограф 5, когда токоприемная дуга 52 принимает удар. Такое устройство безопасности известно специалистам в данной области техники и выполнено в виде пневматической линии, которая проходит по длине токоприемной дуги 52 и соединена с пневматической подвеской 53 рамки. В случае воздействия на токоприемную дугу 52 пневматическая линия получает прокол, и это снижает давление в пневматической подвеске 53 рамки и вызывает складывание рамки 51 пантографа на крышу электровоза. В соответствии с изобретением и со ссылкой на фиг.4 пантограф 5 содержит вторую пневматическую схему 56, которая соединяет пневматический датчик удара 55 с пневматическими приводами 6. Таким образом, участок существующей пневматической схемы питания отводят для питания пневматических приводов 6. Это упрощает интеграцию этих приводов в пантограф 5 вместо пружинных блоков из предшествующего уровня техники.
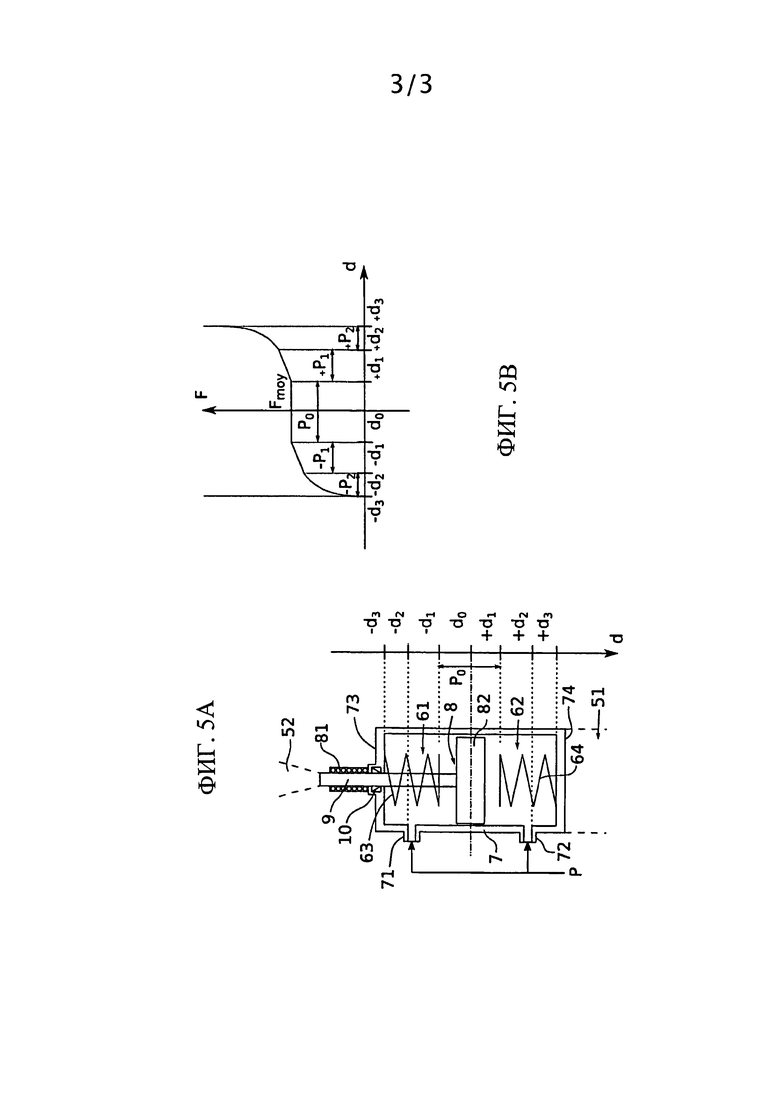
Как показано на фиг.5а, которая иллюстрирует поперечный разрез пневматического привода 6 в соответствии с изобретением, каждый пневматический привод 6 содержит приводной цилиндр 7, который жестко соединен с рамкой 51 пантографа, и поршень 8, который установлен с возможностью поступательного движения в цилиндре 7 и соединен с токоприемной дугой 52 пантографа.
Приводной цилиндр 7 простирается в вертикальном направлении и имеет круглое поперечное сечение. Приводной поршень 8 содержит, в свою очередь, стержень 81, который соединен с круглой пластиной 82, установленной в этом цилиндре 7, стержень 81 выполнен с возможностью поступательного движения в вертикальном направлении вне цилиндра 7, от верхней горизонтальной поверхности 73 цилиндра 7 (фиг.5а). В этом примере вертикальное перемещение стержня 81 обеспечивается сепаратором шарикового подшипника 9, который жестко соединен с верхней поверхностью 73 цилиндра 7, как показано на фиг.5а. Само собой разумеется, что имеются различные средства, которые способны обеспечить перемещение стержня 81 по заданной траектории.
Ход поршня 8 в цилиндре 7, обозначенный ссылкой d на фиг.5b, ограничен торцевыми поверхностями 73, 74 цилиндра 7, среднее исходное положение d0 определено на полпути вверх - высоты цилиндра, как показано на фиг.5а. Внутри цилиндра 7 пластина 82 поршня 8 задает верхнюю пневматическую камеру 61, между пластиной 82 и верхней поверхностью 73 цилиндра 7, и нижнюю пневматическую камеру 62, между пластиной 82 и нижней поверхностью 74 цилиндра 7. Давление Р газа, который в данном случае является воздухом, в различных камерах 61, 62 регулируют таким образом, чтобы обеспечить демпфирование, когда поршень 8 поднимается и опускается в цилиндре 7.
В этом примере давление Р газа одинаково как в верхней камере 61, так и в нижней камере 62 пневматического привода 6, которые [камеры] имеют одинаковый объем, когда пластина 82 поршня в среднем исходном положении d0, как показано на фиг.5а. Поскольку стержень 81 проходит в верхнюю камеру 61 цилиндра 7, объем, доступный для газа, в верхней камере 61 меньше, чем в нижней камере 62. Это означает то, что сила F, приложенная вертикально вверх к пластине 82 поршня (то есть сила контакта F токоприемной дуги 52) может быть определена с помощью следующего уравнения:
F=P·(S-s),
в котором:
- Р соответствует давлению воздуха в каждой из камер 61, 62;
- S соответствует площади поперечного сечения цилиндра 7, и
- s соответствует площади поперечного сечения стержня 81.
Предпочтительно пневматический привод 6 позволяет управлять силой контакта F в соответствии с давлением воздуха Р в каждой из камер 61, 62. Предпочтительно пневматическое давление Р в пневматическом приводе 6 устанавливается таким образом, чтобы прикладывать заданную силу контакта Fmoy к контактным проводам 3, когда пластина 82 находится в среднем исходном положении d0. Пневматическое давление Р, таким образом, предпочтительно может зависеть от скорости железнодорожного транспортного средства 1 для улучшения токосъема и, следовательно, для ослабления взаимосвязи между рамкой 51 и токоприемной дугой 52, когда скорость железнодорожного транспортного средства 1 увеличивается. Например, кривая на фиг.5b показывает силу контакта Fmoy, равную 150 Н, которая приложена к токоприемной дуге 52 в среднем положении d0, когда железнодорожный вагон 1 движется со скоростью 300 км/час.
Пневматические приводы 6 пневматически демпфируют любые малоамплитудные изменения высоты. Каждый пневматический привод 6 компенсирует вертикальное перемещение поршня 8, который соединен с токоприемной дугой 52. Поскольку цилиндр 7 привода, который жестко соединен с рамкой 51, остается неподвижным, токоприемная дуга 52 и рамка 51 не взаимосвязаны.
Как показано на фиг.5а, каждый пневматический привод 6 дополнительно содержит механические пружины 63, 64 в каждой пневматической камере 61, 62, каждая пружина установлена на одном конце цилиндра 7 привода. Таким образом, каждый пневматический привод 6 содержит верхнюю механическую пружину 63 в верхней камере 61, которая соединена с верхней поверхностью 73 цилиндра 7, и нижнюю механическую пружину 64 в нижней камере 62, которая соединена с нижней поверхностью 74 цилиндра 7.
Каждая механическая пружина 63, 64 установлена в пневматической камере 61, 62 без предварительного напряжения и не вступает в контакт с пластиной 82 поршня, когда пластина 82 находится в своем среднем исходном положении d0. В этом примере нижняя и верхняя механические пружины 64, 63 являются идентичными и, когда они находятся в состоянии покоя, имеют длину, которая меньше, чем половина высоты цилиндра 7, таким образом, устанавливая основной диапазон Р0, центрированный в области среднего исходного положения d0 пластины 82, в пределах которого пластина 82 может перемещаться вертикально, не вступая в контакт с верхней или нижней пружинами 63, 64, как показано на фиг.5а. Этот основной диапазон Р0 ограничен положением d1 на нижнем конце верхней пружины 63, и положением +d1 на верхнем конце нижней пружины 64, как показано на фиг.5а и 5b.
Как показано на фиг.5b, которая показывает силу контакта F пневматического привода в соответствии с ходом поршня 7, упругость пневматического привода, которая соответствует градиенту силы контакта F, равна нулю в пределах основного диапазона Р0, что улучшает динамическое поведение пантографа 5.
В этом примере коэффициент жесткости верхней и нижней механических пружин 63, 64 находится в диапазоне от 500 до 1500 Н/м, предпочтительно 600 Н/м, который является более низким по сравнению с коэффициентом жесткости механической пружины в соответствии с предшествующим уровнем техники, который составляет около 3000 Н/м. Механические пружины 63, 64 с таким низким коэффициентом жесткости позволяют компенсировать любое изменение высоты контактного провода 3, имеющее амплитуду, которая выходят за границы основного диапазона Р0. Такие пружины 63, 64 используются для облегчения устранения взаимосвязи между рамкой 51 и токоприемной дугой 52 для среднеамплитудных колебаний, что улучшает динамические характеристики пантографа 5. Действительно, пневматическое давление Р пневматического привода 6 устраняет необходимость в пружинах с высоким коэффициентом жесткости, которые ухудшают динамические характеристики пантографа 5. Верхние и нижние пружины 63, 64 предпочтительно имеют одинаковый коэффициент жесткости, но само собой разумеется, что коэффициент жесткости может отличаться для облегчения перемещения вверх или вниз токоприемной дуги 52.
Как показано на фиг.5а, верхняя и нижняя камеры 61, 62 снабжаются газом посредством соответствующих отверстий 71, 72 подачи, которые соответственно выполнены в вертикальной стенке цилиндра 7 на расстоянии подачи -d2, +d2, определенном по отношению к среднему исходному положению d0 пластины 82 внутри цилиндра 7. Таким образом, когда пластина 82 отходит от средней позиции на расстояние, которое больше, чем расстояние d2 подачи, пластина 82 упирается в торцевые поверхности 73, 74 цилиндра 7 в верхнем и нижнем граничных положениях -d3, +d3, как показано на фиг.5а и 5b.
Со ссылкой, в частности, на фиг.5, пневматический привод 6 определяет несколько диапазонов силы контакта для демпфирования смещений токоприемной дуги 52:
- центральный диапазон Р0, образованный между -d1/+d1, по существу пневматический, с упругостью, равной нулю, сила контакта Fmoy которых определяется пневматическим давлением в камерах 61, 62;
- положительный диапазон пружины+Р1, образованный между +d1/+d2, сочетающий пневматическое демпфирование с низкой упругостью с упругостью нижней пружины 64, расположенной в нижней камере 62;
- отрицательный диапазон пружины -Р1, образованный между -d2/-d1, сочетающий пневматическое демпфирование с низкой упругостью с упругостью верхней пружины 63, расположенной в верхней камере 61;
- положительный граничный диапазон +Р2, образованный между +d2/+d3, сочетающий пневматическое демпфирование двух отверстий 71, 72 подачи с упругостью нижней пружины 64, расположенной в нижней камере 62, а также
- отрицательный граничный диапазон -Р2, образованный между -d3/-d2, сочетающий пневматическое демпфирование двух отверстий 71, 72 подачи с упругостью верхней пружины 63, расположенной в верхней камере 61.
Опорные диапазоны +Р2, -Р2 позволяют обеспечить плавный переход между силой контакта, возникающей при коэффициенте жесткости механических пружин 63, 64, и силой контакта при упирании в торцевые поверхности 73, 74 цилиндра 7 привода.
Представлен пневматический привод 6, у которого давление в пневматических камерах 61, 62 одинаковое. Само собой разумеется, что давление в пневматических камерах 61, 62 может отличаться и может управляться независимо, чтобы минимизировать колебания силы контакта пантографа 5.
Представлен пневматический привод 6, в котором каждая из камер 61, 62 получает питание через отверстие 71, 72 подачи. Само собой разумеется, что пневматическое питание привода 6 может быть различным. Например, обращаясь к фиг.6, может быть предусмотрен зазор 11 между пластиной 82 поршня и внутренней поверхностью цилиндра 7, чтобы обеспечить утечку между двумя камерами 61, 62 и, таким образом, подавать питание только в одну из двух камер 61, 62. Степень утечки рассчитывается таким образом, чтобы обеспечить желаемое демпфирование. Предпочтительно в вертикальное отверстие 84 в пластине 82 установлен тарированный обратный клапан 83 (фиг.6) для улучшения динамики демпфирования, демпфирование предпочтительно является вязким.
Пневматический привод 6, имеющий механические пружины 63, 64, в соответствии с изобретением предоставляет возможность не только обеспечения желаемой упругости подвески токоприемной дуги 52, но и регулировки демпфирования этой подвески. Демпфирование является параметром, который оказывает сильное влияние на динамические характеристики пантографа 5 при его взаимодействии с контактным проводом 3 контактной сети. Демпфирование предпочтительно может быть задано путем фиксации уплотнителя 10 в торцевой поверхности 73 цилиндра 7, как показано на фиг.6, стержень 81 поршня перемещается поступательно в вертикальном направлении внутри указанного уплотнителя 10 с трением, которое предпочтительно является сухим. Материал соединителя 10, который изготовлен, например, из эластомера или графита, выбирают в соответствии с желаемым демпфированием. Также можно предусмотреть зазор 11 между пластиной 82, поршнем и внутренней поверхностью цилиндра 7, для обеспечения утечки между двумя камерами 61, 62 с целью получения вязкого демпфирования. Также в вертикальном отверстии 84 в пластине 82 может быть установлен обратный клапан 83 для обеспечения различного демпфирования, когда поршень 8 поднимается или опускается внутри цилиндра 7.
Изобретение относится к токоприёмникам для линий энергоснабжения транспортных средств с электротягой. Пантограф (5) содержит по меньшей мере одну рамку (51), токоприемную дугу (52) и подвеску токоприемной дуги, установленную между рамкой (51) и указанной токоприемной дугой (52). Подвеска токоприемной дуги содержит по меньшей мере один пневматический привод (6). Пневматический привод (6) содержит цилиндр (7), который жестко соединен с рамкой (51), и поршень (8), который жестко соединен с токоприемной дугой (52). Поршень (8) установлен с возможностью поступательного перемещения в цилиндре (7) таким образом, чтобы разделить объем цилиндра (7) между верхней пневматической камерой (61) и нижней пневматической камерой (62). Каждая из пневматических камер (61, 62) содержит сжатый газ, который демпфирует перемещение поршня (8). Технический результат заключается в улучшении динамических характеристик пантографа. 9 з.п. ф-лы, 7 ил.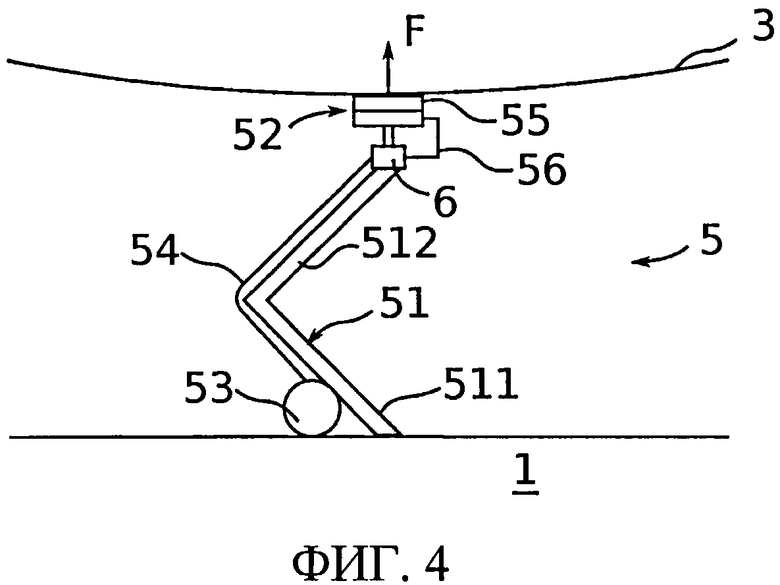
1. Пантограф (5) для передачи электрической энергии между контактным проводом (3) и железнодорожным транспортным средством (1), содержащий по меньшей мере одну рамку (51), предназначенную для установки на железнодорожное транспортное средство (1), токоприемную дугу (52), предназначенную для вступления в контакт с контактным проводом (3), и подвеску токоприемной дуги, установленную между рамкой (51) и указанной токоприемной дугой (52), при этом пантограф отличается тем, что подвеска токоприемной дуги содержит по меньшей мере один пневматический привод (6), включающий цилиндр (7), который жестко соединен с рамкой (51), и поршень (8), который жестко соединен с токоприемной дугой (52), установленный с возможностью поступательного перемещения в цилиндре (7) таким образом, чтобы разделить объем цилиндра (7) между верхней пневматической камерой (61) и нижней пневматической камерой (62), при этом каждая из пневматических камер (61, 62) содержит сжатый газ, который демпфирует перемещение поршня (8).
2. Пантограф по п.1, отличающийся тем, что по меньшей мере одна из пневматических камер (61, 62) содержит механическую пружину (63, 64).
3. Пантограф по п.2, отличающийся тем, что указанная механическая пружина (63, 64) свободно установлена в пневматической камере (61, 62).
4. Пантограф по любому из пп.2 или 3, отличающийся тем, что указанная механическая пружина (63, 64) имеет коэффициент жесткости от 500 до 1500 Н/м, предпочтительно равный 600 Н/м.
5. Пантограф по любому из пп.1-3, отличающийся тем, что по меньшей мере одна из указанных пневматических камер (61, 62) содержит по меньшей мере одно отверстие (71, 72) пневмопитания, предусмотренное в указанном цилиндре (7).
6. Пантограф по любому из пп.1-3, отличающийся тем, что пневматическое давление в пневматическом приводе (6) установлено таким образом, чтобы обеспечить заданную силу контакта (Fmoy) с контактным проводом (3).
7. Пантограф по п.6, отличающийся тем, что поршень (8) находится в исходном положении (d0) в цилиндре (7) при заданной силе контакта (Fmoy), пневматический привод предназначен для пневматического демпфирования перемещения поршня в области его исходного положения (d0) в заданном основном диапазоне перемещений (P0).
8. Пантограф по п.7, отличающийся тем, что пневматический привод (6) предназначен для пневматического и механического демпфирования перемещений поршня (8), которые не входят в заданный основной диапазон перемещений (P0).
9. Пантограф по любому из пп.1-3, 7, 8, отличающийся тем, что пантограф (5) содержит пневматическую подвеску (53) рамки, выполненную таким образом, чтобы перемещать рамку (51) по отношению к железнодорожному транспортному средству, пантограф (5) содержит первую пневматическую схему (54), которая соединяет пневматическую подвеску рамки (53) с пневматическим приводом (6).
10. Пантограф по любому из пп.1-3, 7, 8, отличающийся тем, что токоприемная дуга (52) содержит пневматический датчик обнаружения удара (55), пантограф (5) содержит вторую пневматическую схему (56), которая соединяет пневматический датчик обнаружения удара (55) с пневматическим приводом (6).
| Способ переработки мелкодисперсного сырья в печи взвешенной плавки | 2020 |
|
RU2740741C1 |
| US 5954171 A, 21.09.1999 | |||
| АСИММЕТРИЧНЫЙ ТОКОПРИЕМНИК ДЛЯ ЭЛЕКТРОПОЕЗДОВ | 2004 |
|
RU2272720C1 |
| Способ определения плавности ската ангренажа | 1957 |
|
SU112105A1 |
| Машина для разрезания пластов конфетных масс на дольки | 1960 |
|
SU134121A1 |

