Область техники
Изобретение относится к системе подвески для колесных транспортных средств, в частности, к системе подвески, которая может работать в двух разных режимах, преодолевая компромисс между оптимальной комфортностью езды и оптимальной управляемостью транспортного средства, за счет возможности переключения жесткости основной пружины подвески между режимами оптимальной управляемости и оптимальной комфортности езды.
Уровень техники
Подвеска транспортного средства возникла раньше моторизированных машин. Сначала она появилась на транспортных средствах с конной тягой и использовалась для изоляции пассажира от неровностей дороги. При прохождении неровностей подвеска транспортного средства позволяет независимо перемещаться вверх и вниз колесам, а не всему транспортному средству с пассажирами. Такая конструкция обеспечивает следующие преимущества:
а) неровности дороги не оказывают непосредственного влияния на пассажиров, в результате чего так называемая «комфортность езды» значительно повысилась;
б) энергия, необходимая для подъема вверх колес при наезде на неровности дороги, значительно меньше энергии, требующейся для поднятия всего транспортного средства, то есть эффективность использования энергии значительно повышается;
в) управляемость транспортных средств с ростом скорости движения значительно улучшилась, поскольку масса всего транспортного средства в целом не подпрыгивает при наезде на неровности дороги.
Подвеска транспортного средства может быть выполнена разными способами, но обычно она выполняется так, чтобы оградить основной кузов транспортного средства, называемый «подрессоренной массой», от колесных систем, которые называют «неподрессоренной массой», посредством устройства аккумулирования энергии, как правило, какой-либо пружины. Пружина аккумулирует энергию, в то время как колесная система, включающая в себя ступицу, тормоз и рычаги управления движением, при наезде на неровности дороги может перемещаться относительно основного кузова транспортного средства. После прохождения неровности, пружина освобождает накопленную энергию, чтобы вернуть колесную систему обратно в исходное положение. Пружина создает усилие, пропорциональное своему смещению, но не рассеивает энергию. К сожалению, в системе подвески, включающей в себя только лишь устройство аккумулирования энергии, возникают неконтролируемые вибрации (явление, хорошо известное из физики простых пружинно-массовых систем). Без демпфирования колебания пружинно-массовой системы продолжатся до тех пор, пока не будет приложено внешнее усилие. В системе подвески транспортного средства такие демпфирующие силы обычно создаются демпфирующим устройством какого-либо типа, как правило, гидравлическим, которое создает усилие, пропорциональное скорости. Таким образом, демпфер создает силу сопротивления, действующую в обоих направлениях перемещения пружины, и, следовательно, уменьшает скорость смещения пружины до нуля в положении покоя. Важно отметить, что демпфер является лишь вспомогательным компонентом подвески, поскольку он не может поддерживать корпус транспортного средства; эту основную функцию выполняет пружина.
При приближении к границам динамических характеристик транспортного средства система подвески, включающая в себя рычаги управлением движения, а также энергоаккумулирующий и демпфирующий компоненты, становится ограничивающим фактором, препятствующим достижению оптимального уровня комфорта. Если пружины и демпферы перемещаются достаточно легко (обеспечивается высокий уровень изоляции пассажира от неровностей дороги), подрессоренная масса совершает слишком большие перемещения в результате воздействия боковых и продольных сил, возникающих при повороте водителем рулевого колеса, а также нажатии на педали газа и тормоза. Эту реакцию, как правило, называют «отзывчивость управления», а качество изоляции пассажира от неровностей дороги называют «чувствительностью передвижения».
За счет изменения жесткости пружины и коэффициентов демпфирования на каждом из четырех колес в углах транспортного средства, несмотря на то, что колесные пары разных транспортных средств, как правило, точно подгоняются, можно оптимизировать характеристики езды и управления транспортного средства. В целом, более высокая жесткость пружин, измеряемая в величине силы на единицу смещения, обеспечивает более высокую жесткость управления и отличную управляемость транспортного средства, в то время как более мягкие пружины подвески обеспечивают более «мягкую» поездку, но снижают управляемость. Коэффициенты демпфирования, как правило, выбирают в зависимости от жесткости. К сожалению, оптимальная чувствительность передвижения достигается при более низкой жесткости, а оптимальная отзывчивость управления, наоборот, при более высокой жесткости. Таким образом, конструкторы транспортных средств были вынуждены искать компромисс между чувствительностью передвижения и отзывчивостью управления.
Были предприняты многочисленные попытки, направленные на получение менее компромиссной подвески транспортного средства путем использования различных режимов. В патентном документе US 3083034 описан один из наиболее ранних подходов к созданию регулируемой подвески. В этом документе описан способ регулирования жесткости и клиренса посредством регулирования эффективной длины листовой рессоры. Это обеспечивает возможность выбора оптимальной настройки подвески, соответствующей большой или малой подрессоренной массе. В то время листовая рессора являлась предпочтительным средством аккумулирования энергии на загруженной оси дорожных транспортных средств, но с появлением наиболее широко применяемых сейчас спиральных и торсионных пружин изменились и появились новые способы регулирования жесткости пружины.
В документе US 5722645 описан способ ручного регулирования свободной длины спиральной пружины в фиксированной стойке подвески транспортного средства. Известно, что уменьшение длины спиральной пружины в свободном состоянии приводит к повышению её жесткости, и, наоборот, увеличение длины в свободном состоянии снижает жесткость. Разделительный элемент, описанный в документе US 5722645, позволяет регулировать рабочую длину спиральной пружины путем избирательного перемещения одного края в соответствующей приемной канавке и фиксации его посредством стопорного устройства. Таким образом, длину пружины в свободном состоянии можно вручную уменьшить, что приводит к одновременному повышению жесткости и уменьшению клиренса транспортного средства. И наоборот, длину пружины в свободном состоянии можно увеличить, что приведет к уменьшению жесткости и увеличению клиренса транспортного средства.
В целом, установлено, что иметь более жесткую пружину при большой нагрузке транспортного средства предпочтительнее, чем при малой нагрузке, поскольку при этом можно сохранять относительно постоянную частоту собственных колебаний. Частота собственных колебаний – это физический параметр, фактически «чувствуемый» пассажиром; он описывается формулой 
Были предложены многорежимные, адаптивные и полностью активные системы подвески, но большинство из них представляло собой не более чем электронное средство регулирования амортизаторов. Как уже указывалось выше, демпфер является вспомогательным компонентом подвески, не обеспечивающим возможность выбора между высокой и низкой жесткостью и соответствующими значениями собственной частоты. В документе US 4913457 описана адаптивная система подвески, непрерывно контролирующая колесную нагрузку и регулирующая уровень корпуса транспортного средства и/или характеристику демпфирования амортизаторов. Такая система представляет собой усложненный адаптивный подход, но она также не обеспечивает регулирование фактической жесткости, и, следовательно, частоту собственных колебаний подрессоренной массы. В US 5725239 описана адаптивная система подвески для автомобилей, содержащая пневматическое устройство, соединяющее пневматические амортизаторы с гидравлическими амортизаторами и создающее контуры высокого и низкого давления, что обеспечивает две разные жесткости подвески и частоты колебаний во время езды. Но несмотря на то, что именно это и являлось конечной целью создания селективной двухрежимной системы подвески, применение пневматических амортизаторов является нежелательным для высококачественных транспортных средств из-за их веса, сложности, трудности обеспечения выполнения загона Гука по линейной характеристике жесткости и низкой надежности по сравнению с металлическими устройствами аккумулирования энергии. В документе US 6923434 описана пневматическая рессора, обеспечивающая регулирование как клиренса, так и жесткости посредством резиновых камер с избирательным регулированием давления. Такая пневматическая пружина может обеспечивать относительно низкую жесткость при низком клиренсе и относительно высокую жесткость при высоком клиренсе. Таким образом, помимо недостатков, характерных для вышеперечисленных пневматических пружин, описанная в документе US 6923434 конфигурация создает эффект, прямо противоположный требуемому для высококлассных транспортных средств, а именно, обеспечению низкой жесткости при высоком клиренсе и высокой жесткости при низком клиренсе.
Кроме того, в документе FR 1153797 представлено средство сохранения стабильного клиренса для гоночного автомобиля, вместо того, чтобы иметь высокий или низкий клиренс в зависимости от дорожных условий. Это достигается посредством использования последовательно соединенных торсионного вала и спиральной пружины и установленного параллельно спиральной пружине пневмоцилиндра с поршнем. Получаемая общая жесткость подвески определяется уравнением 1/KT = 1/Kторсион + 1/(Kспиральная пружина + K пневпоцилиндр f(P,d)). Такая конфигурация, в целом, обеспечивает достаточно постоянную курсовую устойчивость и управляемость в ходе гонки, несмотря на быстрое изменение веса топлива, которое, в других условиях, привело бы к изменению вышеуказанных характеристик вследствие изменяющегося клиренса. С целью компенсации быстрого изменения веса топлива система начинает работу при высоком давлении в пневмоцилиндре, эффективно разгружая спиральную пружину. Это создает наивысшее усилие упругости и общую жесткость подвески, соответствующие максимальной массе автомобиля, с правильным клиренсом при полностью заполненном топливном баке. Но даже в этом состоянии возможно блокирование спиральной пружины вместе с пневморессорой как реакция на высокие уровни воздействия со стороны подвески, которая в достаточной степени сжимает воздух в пневмоцилиндре и соответственно воздействует на спиральную пружину. В процессе выработки топлива давление в пневмоцилиндре постепенно снижается, так что изменяется жесткость пневмоцилиндра, и общая жесткость спиральной пружины и пневмоцилиндра уменьшается даже при прогрессирующем включении в действие спиральной пружины. Этим обеспечивается поддержание правильного клиренса транспортного средства при уменьшении его веса, т.к. для отклонения подвески в той же степени теперь требуется меньшая масса. Снижение давления может происходить как ступенчато, по подаваемой водителем команде на снижение давления в пневмоцилиндре, так и непрерывно, путем автоматического регулирования давления в пневмоцилиндре в зависимости от сигнала, поступающего от датчика клиренса или, например, от уровня топлива в баке. Это обеспечивает непрерывное снижение общей жесткости, как ступенчато между остановками на дозаправку, так и непрерывно во время гонки. При заполнении топливного бака в точке заправки процесс повторяется. Таким образом, при вождении автомобиля общая жесткость непрерывно изменяется в имеющемся диапазоне для поддержания постоянного клиренса.
В этой области техники существуют и другие решения для адаптивных и управляемых вручную двухрежимных систем подвески, но ни одно из них не обеспечивает требуемые характеристики для высококлассного транспортного средства, в котором используются металлические устройства аккумулирования энергии, такие как спиральные, листовые или торсионные пружины.
Раскрытие изобретения
Согласно изобретению избирательно переключаемая двухрежимная система подвески транспортного средства, содержит приводимый в действие толкателем амортизатор, расположенный между неподресоренной и подрессоренной массами одного угла транспортного средства и содержащий торсион с первой заданной жесткостью K1 и спиральную пружину со второй заданной жесткостью K2, последовательно соединенные друг с другом, обеспечивая общую жесткость KT. Параллельно спиральной пружине установлен блокирующий привод, выполненный с возможностью обеспечения свободного перемещения спиральной пружины в первом режиме и предотвращения перемещения спиральной пружины во втором режиме, при этом в первом разблокированном режиме блокирующего привода жесткость подвески транспортного средства определена уравнением 1/KT = 1/K1 + 1/K2, а во втором заблокированном режиме блокирующего привода общая жесткость подвески транспортного средства по существу выше и определена уравнением KT=K1, так что избирательно обеспечивается режим низкой жесткости для оптимального комфорта езды и режим высокой жесткости для оптимальной управляемости.
В одном из вариантов выполнения блокирующий привод содержит гидроцилиндр и гидравлический контур, выполненный с возможностью избирательного открытия и перекрытия соединения между двумя объемами в гидроцилиндре для обеспечения первого разблокированного режима и второго заблокированного режима.
В другом варианте выполнения блокирующий привод содержит гидроцилиндр и гидравлический контур, выполненный с возможностью избирательного открытия и перекрытия соединения между двумя объемами в гидроцилиндре для обеспечения первого разблокированного режима и второго заблокированного режима, при этом гидравлический контур выполнен с возможностью приведения в действие гидропривода для перемещения спиральной пружины в заданное положение, обеспечивая заданный клиренс транспортного средства в режиме с жесткостью K1.
В еще одном варианте выполнения блокирующий привод содержит гидроцилиндр и гидравлический контур, выполненный с возможностью избирательного открытия и перекрытия соединения между двумя объемами в гидроцилиндре для обеспечения первого разблокированного режима и второго заблокированного режима, при этом гидравлический контур выполнен с возможностью приведения в действие гидропривода для перемещения спиральной пружины в заданное положение, так что клиренс транспортного средства в режиме с жесткостью K1 может быть меньше, чем в режиме с жесткостью 1/K1+1/K2.
Изобретение поясняется чертежами.
Краткое описание чертежей
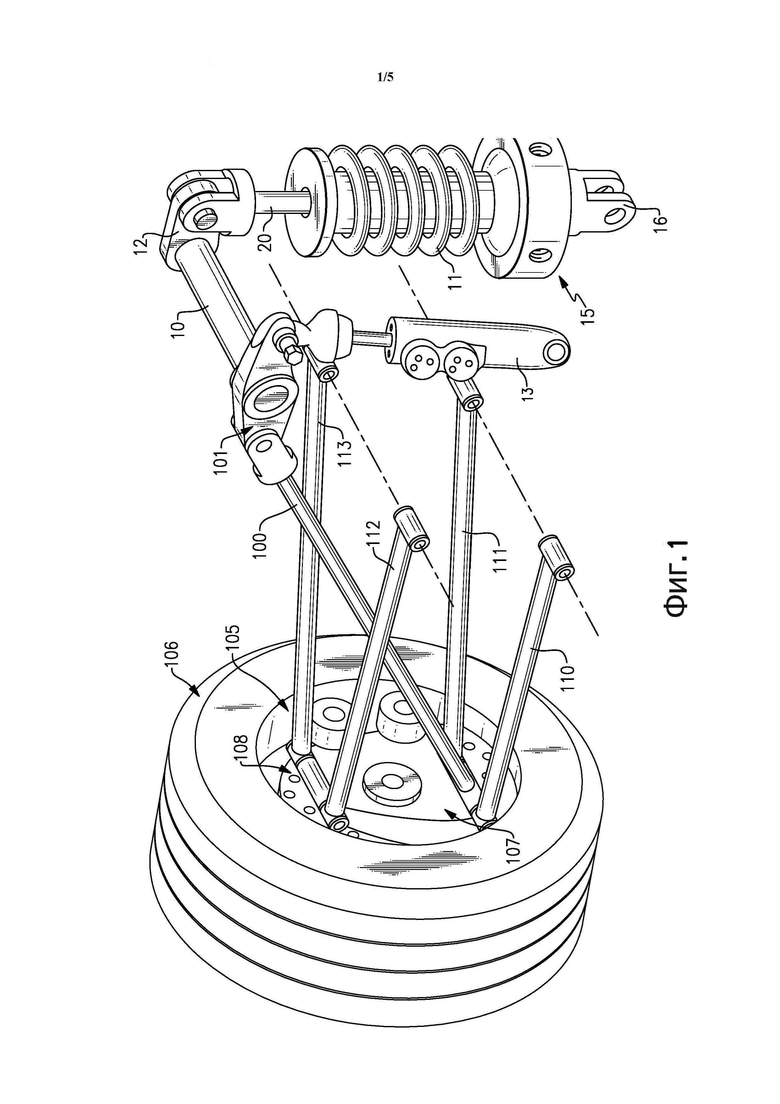
На фиг. 1 схематично показана подвеска одного колеса транспортного средства в соответствии с одним из вариантов осуществления изобретения;
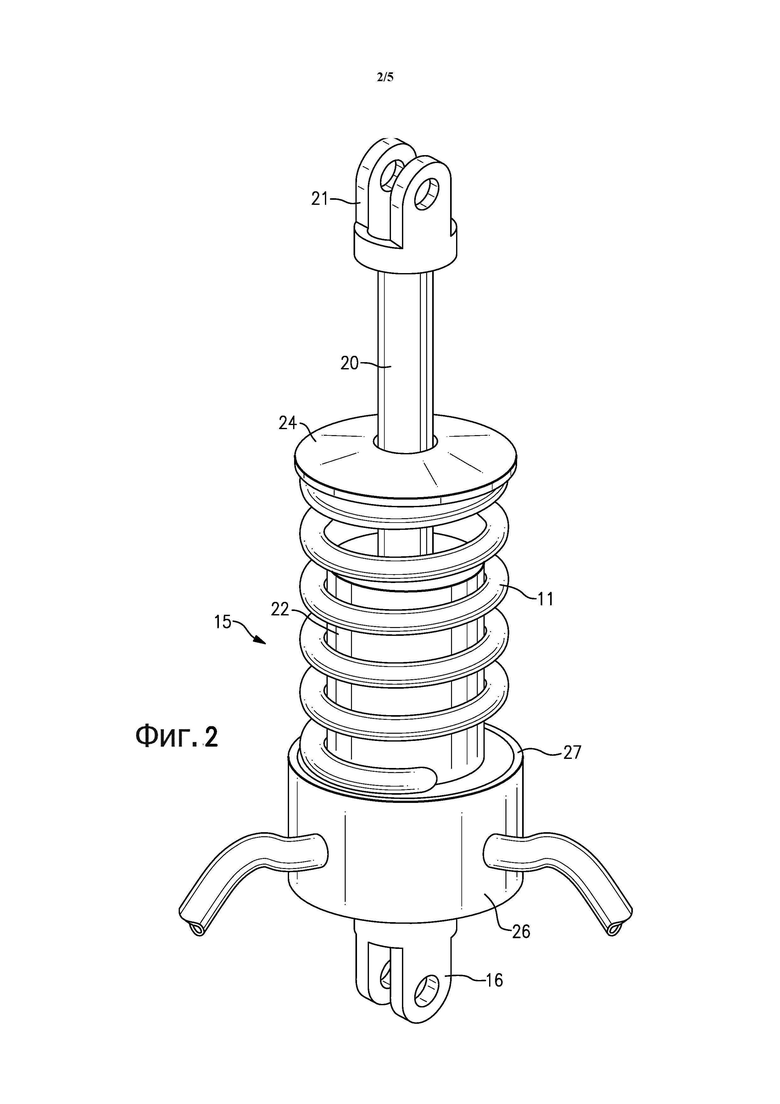
на фиг. 2 – гидравлический блокирующий привод, используемый в подвеске по фиг. 1, вид в перспективе в увеличенном масштабе;
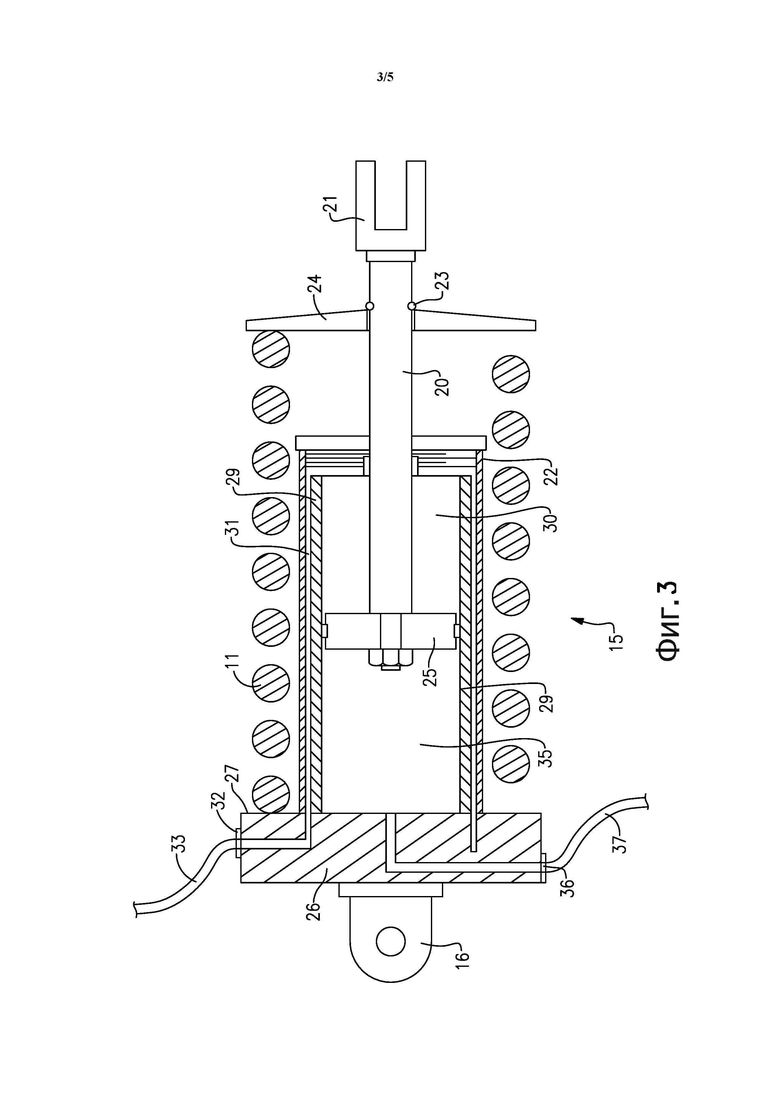
на фиг. 3 – гидравлический блокирующий привод по фиг. 2, вид в разрезе;
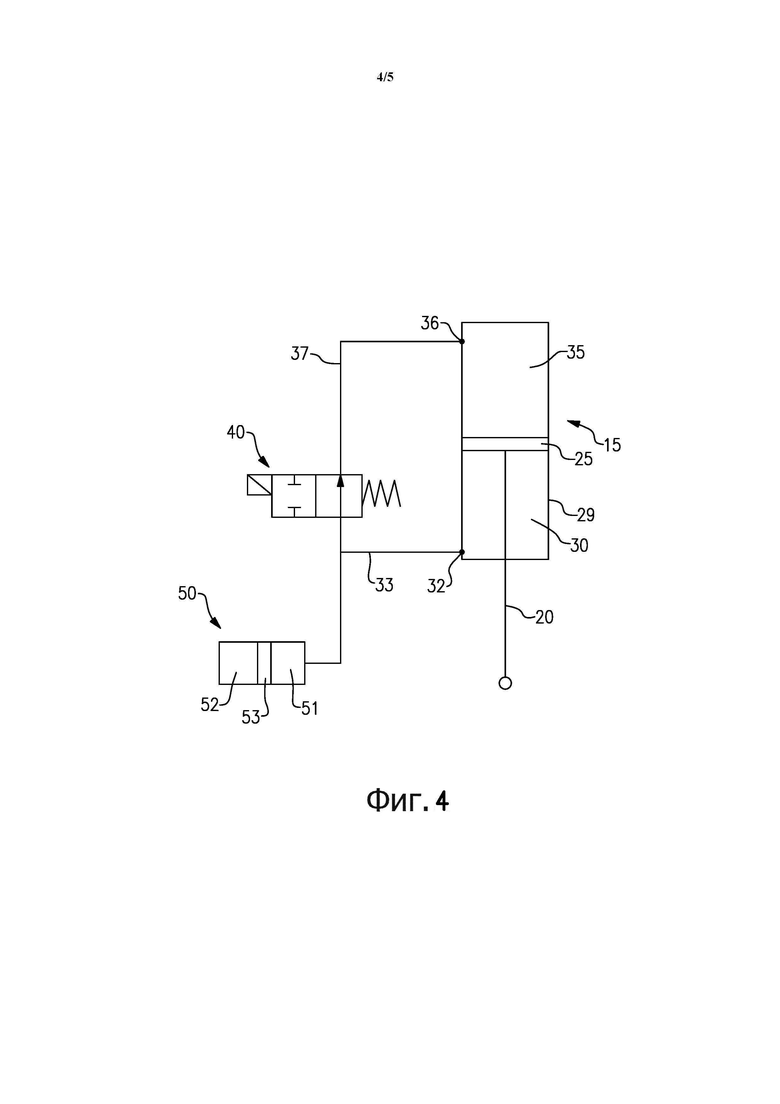
на фиг. 4 – схема гидравлического контура управления, используемого совместно с подвеской по фиг. 1;
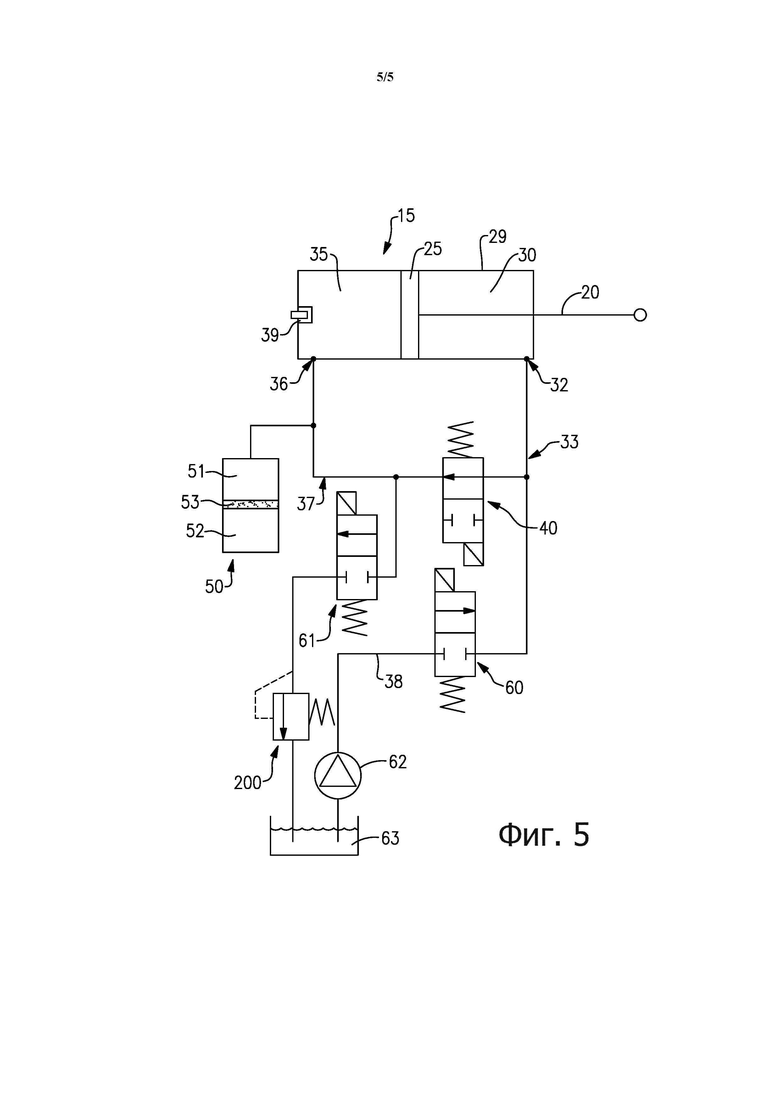
на фиг. 5 – схема гидравлического контура управления, используемого при получении заданного более низкого клиренса для обеспечения требуемых характеристик управляемости, в соответствии с одним из вариантов его выполнения.
Осуществление изобретения
Варианты выполнения, примеры и альтернативы, приведенные в настоящем описании изобретения, его формуле и показанные на чертежах, включая их любые различные особенности, могут использоваться по отдельности и в комбинациях друг с другом. Особенности одного варианта выполнения применимы ко всем возможным вариантам выполнения, если только они не являются технически несовместимыми.
Учитывая ограничения, характерные для известных адаптивных систем подвески и, более конкретно, для систем, в которых используются пружины, желательно было бы иметь полностью автоматическое устройство с избирательным регулированием, позволяющим переключать жесткость и клиренс между двумя отдельными режимами независимо от величины клиренса или нагрузки транспортного средства в данный момент времени. Такой подход обеспечивает возможность выбора между оптимальной управляемостью транспортного средства, характеризующейся относительно высокой частотой собственных колебаний и низким клиренсом, и режимом оптимальной комфортностью езды, характеризующимся относительно низкой частотой собственных колебаний и высоким клиренсом.
В настоящем изобретении используется простой принцип механики, согласно которому две пружины, подчиняющиеся закону Гука о линейной связи усилия с удлинением, при последовательном соединении образуют единую пружину, подчиняющуюся закону Гука, жесткость которой ниже жесткости любой из отдельных пружин. Две последовательно соединенные пружины жесткостью K1 и K2 обеспечивают жесткость KT, описываемую простой формулой:
В основном варианте выполнения устройство аккумулирования энергии одного из углов транспортного средства содержит торсион с первой заданной жесткостью K1 и спиральную пружину со второй заданной жесткостью K2, последовательно соединенные друг с другом и условно расположенные между неподрессоренной и подрессоренной массами. В первом режиме работы общая жесткость подвески представляет собой жесткость KT, характеризующуюся приведенным выше уравнением. Параллельно спиральной пружине подключен гидропривод с функцией блокировки, так что при подаче команды жесткость K2 может быть заблокирована, а общая жесткость подвески становится равной K1. Кроме того, гидропривод может приводится в действие для установки спиральной пружины в определенное положение, что обеспечивает заданную величину клиренса транспортного средства в режиме с жесткостью K1.
На фиг. 1 показан предпочтительный вариант выполнения подвески согласно изобретению, установленной на одном колесе транспортного средства, представляющей собой независимую подвеску на сдвоенных параллельных А-образных рычагах для управления перемещением и энергоаккумулирующее устройство, приводимое в действие толкателем. Торсион 10, как обычно, приводится в действие толкателем 100 и коромыслом 101. Торсион 10 приводится от центра вращения коромысла 101, а толкатель 100 соединен с полуосью 107 подвески на конце, противоположном концу, соединенному с коромыслом 101. Колесо 105, шина 106, тормозной узел 108 и полуось 107 подвески составляют неподрессоренный угол транспортного средства, соединенный с конструкцией транспортного средства рычагами управления движением 110, 111, 112 и 113, которые ограничивают перемещение неподрессоренного угла одной степенью свободы, а именно, заданным и функционально желаемым направлением движения. Когда неподрессоренный угол перемещается по траектории движения, он поворачивает коромысло 101 толкателем 100 и создает крутящий момент, действующий на торсион 10. Демпфер 13, такой как обычный амортизатор, соединяет опорную конструкцию транспортного средства с коромыслом 101 на расстоянии от продольной оси торсиона 10 для демпфирования движения неподрессоренного угла. Следует учесть, что при необходимости демпфер 13 может быть включен в систему и в другой конфигурации.
В первом режиме работы поворот коромысла 101 приводит либо к накоплению, либо к освобождению энергии, совместно с установленными последовательно друг другу торсионом 10 и спиральной пружиной 11, так что вращение дальнего конца торсиона 10 приводным рычагом 12 приводит к смещению спиральной пружины 11. Спиральная пружина 11 своим концом, противоположным концу, на котором расположен приводной рычаг 12, прикреплена к конструкции транспортного средства посредством пришлифованного соединения 16. В этом первом режиме работы общая жесткость, воздействующая на неподрессоренный угол транспортного средства, Ksr, определяется формулой:
где Ktb – жесткость торсиона 10, а Kcs – жесткость спиральной пружины 11. Согласно вышеприведенному уравнению, общая жесткость (Ksr) меньше значений жесткости каждой из составляющих, и частота собственных колебаний также ниже, что обеспечивает режим оптимальной комфортности езды.
Во втором режиме работы приводится в действие гидравлический блокирующий привод 15, установленный соосно со спиральной пружиной 11, так что он начинает работать как жесткое звено, предотвращая сжатие спиральной пружины 11. Таким образом, поворот коромысла 101 приводит к накоплению или освобождению энергии только торсионом 10, поскольку его дальний конец теперь жестко соединен с конструкцией транспортного средства через задействованный блокирующий привод 15. Во втором режиме работы жесткость Ksr, воздействующая на неподрессоренный угол транспортного средства, определяется формулой:
Во втором режиме работы жесткость, воздействующая на неподрессоренный угол транспортного средства, значительно увеличена по сравнению с первым режимом работы, что увеличивает частоту собственных колебаний и обеспечивает режим оптимальной управляемости.
Гидравлический блокирующий привод 15, более подробно показанный на фиг. 2, содержит корпус 22, шток 20, проушину 21 штока, обращенный к земле соединительный элемент 16, верхнюю тарелку 24 пружины, нижний ограничитель 27 пружины и головку 26 гидравлического коллектора. Как показано на фиг. 3, между штоком 20 и верхней тарелкой 24 установлено стопорное кольцо 23. Соединительный элемент 16 прикреплен к конструкции транспортного средства болтом или аналогичным крепежом, а проушина 21 присоединена с возможностью поворота к наружному концу приводного рычага 12. Спиральная пружина 11 соосно расположена вокруг штока 20 и корпуса 22 блокирующего привода 15, причем один конец пружины удерживается нижним ограничителем 27, а другой поддерживается в предварительно нагруженном состоянии верхней тарелкой 24. На фиг. 3 более подробно показано жесткое закрепление штока 20 гидравлического блокирующего привода 15 к поршню 25, перемещающемуся в цилиндре 29. Полость цилиндра 29 разделена на два изменяемых рабочих объема 30 и 35, заполненных соответствующей гидравлической жидкостью. Головка 26 гидравлического коллектора выполнена так, что она образует гидравлический контур 31, соединяющий верхний гидравлический объем 30 с первым внешним отверстием 32, а нижний гидравлический объем 35 – со вторым внешним отверстием 36.
В первом режиме работы два наружных отверстия 32 и 36 соединены непосредственно друг с другом, и гидравлическая жидкость может свободно перетекать между двумя гидравлическими объемами 30 и 35. Таким образом, поршень 25 цилиндра может свободно перемещаться в полости цилиндра 29, следовательно, смещение спиральной пружины 11 ничем не ограничивается, что позволяет ей действовать последовательно с торсионом 10.
Во втором режиме работы два наружных отверстия 32 и 36 отсоединены друг от друга, и, следовательно, гидравлическая жидкость не может перемещаться между двумя гидравлическими объемами 30 и 35. В результате поршень 25 не может перемещаться в полости цилиндра 29, и, следовательно, спиральная пружина 11 оказывается заблокированной, т.е. только торсион 10 может аккумулировать энергию, поступающую в результате перемещения подвески.
Схема гидравлического контура управления, используемого для открывания и закрывания соединения между двумя внешними отверстиями 32 и 36 гидравлического блокирующего привода 15 показана на фиг. 4. Между первым внешним отверстием 32 и вторым внешним отверстием 36 установлен двухлинейный двухпозиционный электроуправляемый гидроклапан 40, который соединен с ними соответствующими гидравлическими линиями 33 и 37. Гидроклапан 40 в нормальном положении открыт, так что гидравлические линии 33 и 37 соединены напрямую без блокировки. В этой конфигурации гидравлическая жидкость может свободно перетекать между двумя гидравлическими объемами 30 и 35, и поршень 25 может свободно перемещаться в полости цилиндра 29.
При поступлении на гидроклапан 40 соответствующего электрического сигнала он закрывается или блокируется. При этом гидравлическая жидкость не может перетекать между двумя гидравлическими линиями 33 и 37 и, следовательно, между гидравлическими объемами 30 и 35. В этом режиме поршень 25 не может перемещаться внутри полости цилиндра 29. Кроме того, в целях обеспечения практичной работы в гидравлической линии 33 гидравлического контура установлен компенсатор 50 с объемом для гидрожидкости, вытесняемой штоком 20, входящим в гидравлический блокирующий привод 15. Компенсатор 50 имеет объем 51 для хранения гидравлической жидкости, плавающий поршень 53 и емкость 52 со сжатым газом, выполненные так, что когда шток 20 входит в гидравлический блокирующий привод 15, когда гидроклапан 40 находится в своем нормально-открытом положении, гидравлическая жидкость, вытесняемая штоком 20, поступает в объем 51. При выдвижении штока 20 из гидравлического блокирующего привода 15, когда гидроклапан 40 находится в своем нормально-открытом положении, гидравлическая жидкость из объема 51 вытесняется обратно в гидравлический блокирующий привод 15 посредством емкости 52 со сжатым газом. Когда гидроклапан 40 получает электрический сигнал на закрытие, поршень 25 блокируется и не может перемещаться внутрь, что необходимо для сжатия спиральной пружины 11.
Таким образом, спиральную пружину 11 можно избирательно заблокировать, и, следовательно, общая жесткость Ksr, воздействующая на угол транспортного средства, активно переключается между двумя разными режимами работы независимо от клиренса или нагрузки транспортного средства. Такое устройство обеспечивает возможность выбора между оптимальной управляемостью транспортного средства, характеризующейся относительно высокой частотой собственных колебаний, и режимом оптимальной комфортности езды, характеризуемым относительно низкой частотой собственных колебаний. С целью практичной реализации на четырехколесном транспортном средстве на каждом из четырех блокирующих приводов 15 каждого угла подвески может быть установлен датчик положения, чтобы четыре соответствующих гидроклапана 40 могли координированно переключаться в свое закрытое или заблокированное положение для сохранения заданного клиренса.
В еще одном варианте выполнения система содержит источник гидравлического давления, такой как насос или аккумулятор, позволяющий устанавливать поршень 25 гидравлического блокирующего привода 15 в заданное положение так, чтобы все четыре угла автомобиля имели заданный оптимальный клиренс, отвечающий требованиям, предъявляемым к транспортному средству по управляемости и комфорту езды.
Когда спиральная пружина 11 и торсион 10, показанные на фиг. 1, действуют последовательно в первом режиме работы клиренс угла транспортного средства определяется массой угла и общей жесткостью последовательно соединенных элементов. Начальная установка клиренса обычно осуществляется путем выталкивания или втягивания толкателя 100 через резьбовую муфту или аналогичное устройство. Когда гидравлический блокирующий привод 15 активирован, а спиральная пружина 11 заблокирована, средний клиренс, естественно, увеличивается, без каких-либо дополнительных действий, поскольку масса угла остается прежней, а общая жесткость значительно увеличивается. Это увеличение клиренса является противоположным тому, что нужно для достижения оптимальной управляемости, поскольку оптимальным сочетанием является повышенная частота собственных колебаний и уменьшенный клиренс. На фиг. 5 приведена схема гидравлического контура, обеспечивающего идеальный заданный низкий клиренс при заблокированной спиральной пружине 11 и повышенной частоте собственных колебаний для обеспечения режима оптимальной управляемости. Между первым внешним отверстием 32 и вторым внешним отверстием гидравлического блокирующего привода 15 установлен двухлинейный двухпозиционный электроуправляемый гидроклапан 40, который соединен с этими отверстиями соответствующими гидравлическими линиями 33 и 37. Гидроклапан 40 в нормальном положении открыт, так что гидравлические линии 33 и 37 соединены напрямую без блокировки. В этой конфигурации гидравлическая жидкость может свободно перетекать между двумя гидравлическими объемами 30 и 35. В результате поршень 25 может свободно перемещаться в полости цилиндра 29. Как было указано выше, для обеспечения практичной работы в гидравлической линии 37 гидравлического контура установлен компенсатор 50 с объемом для гидравлической жидкости, вытесняемой штоком 20, входящим в гидравлический блокирующий привод 15. Кроме того, в системе имеется гидронасос 62 или аналогичный источник давления, высасывающий гидравлическую жидкость под низким давлением из резервуара 63 и подающий её в гидравлическую линию 38. Между гидравлическими линиями 38 и 33 подключен второй двухлинейный двухпозиционный электроуправляемый гидроклапан 60. В нормальном состоянии гидроклапан 60 закрыт, так что создаваемое гидронасосом 62давление не подается в гидравлическую линию 33. Между гидравлической линией 37 и резервуаром 63 подключен третий двухлинейный двухпозиционный электроуправляемый гидроклапан 61. В нормальном состоянии этот гидроклапан 61 закрыт, так что гидравлическая линия 37 отключена от емкости. Кроме того, между гидроклапаном 61 и резервуаром 63 установлен саморегулируемый предохранительный клапан 200, поддерживающий заданное минимальное давление в гидравлической линии 37 и гидравлических объемах 35 и 51. При поступлении соответствующего электрического сигнала одновременно на гидроклапаны 40, 60 и 61, все они меняют свое состояние: клапан 40 переключается в закрытое или заблокированное положение, в котором гидравлическая жидкость не может перетекать между двумя гидравлическими линиями 33 и 37 и, следовательно, между соответствующими гидравлическими объемами 30 и 35; гидроклапан 60 переключается в открытое положение, и гидравлическая жидкость высокого давления получает возможность поступать непосредственно в гидравлический объем 30 по гидравлической линии 33; а гидроклапан 61 также переключается в открытое положение, и гидравлическая жидкость из объема 35 может поступать в резервуар 63 по гидравлической линии 37 и через предохранительный клапан 200. Предохранительный клапан 200 поддерживает в гидравлической линии 37 давление, которое предотвращает стравливание объема 51 компенсатора 50, когда гидроклапан 61 переключается в открытое положение. Таким образом, поршень 25 переводится в полностью втянутое положение в полости цилиндра 29 гидравлического блокирующего привода 15 давлением, значительно более высоким, чем давление от нагрузки на подвеску транспортного средства. Кроме того, в конструкции имеется регулируемый упор 39, так что втянутое положение гидравлического блокирующего привода 15 можно регулировать для обеспечения требуемого клиренса транспортного средства во втором режиме работы, когда спиральная пружина 11 заблокирована.
Таким образом, спиральную пружину 11 можно избирательно блокировать, и, следовательно, общая жесткость Ksr, воздействующая на угол транспортного средства, активно переключается между двумя разными режимами работы с заранее заданными значениями клиренса. Устройство согласно изобретению обеспечивает способ выбора между оптимальной управляемостью транспортного средства, характеризующейся относительно высокой частотой собственных колебаний и низким клиренсом, и режимом оптимальной комфортности езды, характеризующимся относительно низкой частотой собственных колебаний и высоким клиренсом. Описанная система с гидроприводом обеспечивает также установку правильных величин клиренса на всех четырех углах транспортного средства при соответствующей скорости и в требуемые моменты времени, чтобы не нарушался баланс транспортного средства.
Демпфер 13 может приводиться обычным способом, просто от коромысла 101. Демпфер также может быть выполнен адаптивным, что известно из уровня техники, таким образом, чтобы общую жесткость Ksr, действующую на угол транспортного средства, можно было избирательно переключать между двумя режимами, и характеристика демпфирования соответствовала выбранной частоте собственных колебаний.
В рассмотренных вариантах выполнения подвески была показана конкретная конструкция элементов, на их основе возможны и другие конфигурации. Например, описанную систему подвески транспортного средства можно модифицировать так, чтобы вместо спиральной пружины 11 использовался второй торсионный вал, и между двумя торсионными валами располагался блокирующий привод. Блокирующий привод вместо описанного гидравлического устройства может представлять собой электрическое устройство. Несмотря на то, что в различных примерах используются конкретные компоненты, показанные на чертежах, варианты осуществления настоящего изобретения не ограничиваются этими конкретными комбинациями. Хотя в настоящем описании был раскрыт только один из возможных вариантов выполнения, среднему специалисту в данной области техники будет понятно, что в рамках объема изобретения возможны другие модификации и изменения. Истинный объем притязаний и содержание изобретения определяются пунктами формулы изобретения.
Кроме того, следует иметь в виду, что, хотя в рассматриваемом варианте выполнения описываются и заявляются конкретные последовательности операций, эти операции могут выполняться в любой последовательности, отделяться и комбинироваться друг с другом, если не указывается иное, и такие варианты будут по-прежнему охватываться изобретением.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХРЕЖИМНАЯ СИСТЕМА ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА С РЕГУЛИРУЕМЫМ ДОРОЖНЫМ ПРОСВЕТОМ | 2020 |
|
RU2801906C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2012 |
|
RU2575368C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2568047C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2568163C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2013 |
|
RU2568048C1 |
| ГИДРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2560216C1 |
| ДВУХСТУПЕНЧАТОЕ АМОРТИЗИРУЮЩЕЕ УСТРОЙСТВО | 2014 |
|
RU2597061C2 |
| Подвеска транспортного средства с двигателем внутреннего сгорания | 1989 |
|
SU1698095A1 |
| Торсионная подвеска транспортного средства | 1979 |
|
SU870205A1 |
| СИСТЕМА ПОДВЕСКИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА, СОДЕРЖАЩАЯ ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 2009 |
|
RU2448000C2 |
Изобретение относится к системам подвески транспортных средств. Избирательно переключаемая двухрежимная система подвески транспортного средства содержит приводимый в действие толкателем амортизатор. Амортизатор расположен между неподресоренной и подрессоренной массами одного угла транспортного средства. Амортизатор содержит торсион с первой заданной жесткостью K1 и спиральную пружину со второй заданной жесткостью K2, последовательно соединенные друг с другом, обеспечивая общую жесткость KT и блокирующий привод. Блокирующий привод установлен параллельно спиральной пружине и выполнен с возможностью обеспечения свободного перемещения спиральной пружины в первом режиме и предотвращения перемещения спиральной пружины во втором режиме. В первом, разблокированном, режиме блокирующего привода общая жесткость подвески определена уравнением 1/KT=1/K1+1/K2. Во втором, заблокированном, режиме блокирующего привода общая жесткость подвески значительно выше и определена уравнением KT=K1. Достигается возможность избирательно и переключаемо обеспечивать режим низкой жесткости для оптимальной комфортности езды и режим высокой жесткости для оптимальной управляемости. 4 з.п. ф-лы, 5 ил.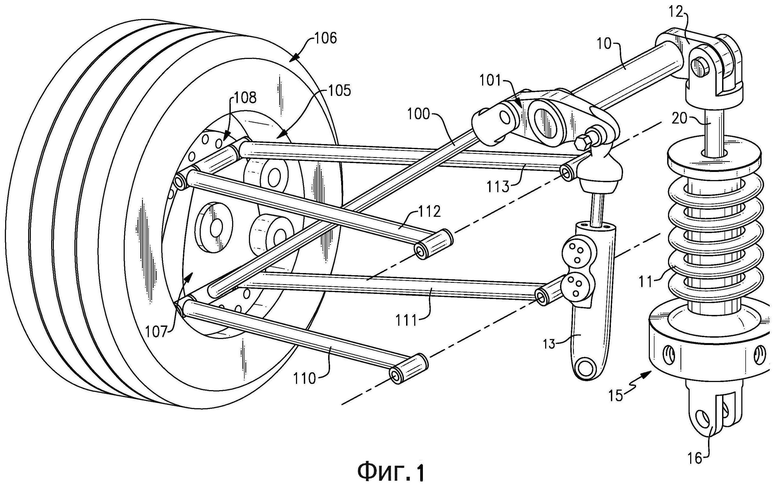
1. Избирательно переключаемая двухрежимная система подвески транспортного средства, содержащая
приводимый в действие толкателем амортизатор (100), расположенный между неподресоренной и подрессоренной массами одного угла транспортного средства и содержащий торсион (10) с первой заданной жесткостью K1 и спиральную пружину (11) со второй заданной жесткостью K2, последовательно соединенные друг с другом, обеспечивая общую жесткость KT;
блокирующий привод (15), установленный параллельно спиральной пружине (11) и выполненный с возможностью обеспечения свободного перемещения спиральной пружины (11) в первом режиме и предотвращения перемещения спиральной пружины (11) во втором режиме, при этом
в первом, разблокированном, режиме блокирующего привода (15) общая жесткость подвески транспортного средства определена уравнением 1/KT=1/K1+1/K2, а во втором, заблокированном, режиме блокирующего привода (15) общая жесткость подвески транспортного средства значительно выше и определена уравнением KT=K1, так что избирательно и переключаемо обеспечивается режим низкой жесткости для оптимальной комфортности езды и режим высокой жесткости для оптимальной управляемости.
2. Система по п. 1, в которой блокирующий привод (15) содержит гидроцилиндр (29) и гидравлический контур, выполненный с возможностью избирательного открытия и перекрытия соединения между двумя объемами (30, 35) в гидроцилиндре (29) для обеспечения первого разблокированного режима и второго заблокированного режима.
3. Система по п. 1, в которой блокирующий привод (15) содержит гидроцилиндр (29) и гидравлический контур, выполненный с возможностью избирательного открытия и перекрытия соединения между двумя объемами (30, 35) в гидроцилиндре (29) для обеспечения первого разблокированного режима и второго заблокированного режима, при этом гидравлический контур выполнен с возможностью приведения в действие указанного гидравлического привода (15) для перемещения спиральной пружины (11) в заданное положение, обеспечивая заданный клиренс транспортного средства в режиме с жесткостью K1, отличный от клиренса транспортного средства в режиме с жесткостью 1/K1+1/K2.
4. Система по п. 1, в которой блокирующий привод (15) содержит гидроцилиндр (29) и гидравлический контур, выполненный с возможностью избирательного открытия и перекрытия соединения между двумя объемами (30, 35) в гидроцилиндре (29) для обеспечения первого разблокированного режима и второго заблокированного режима, при этом гидравлический контур выполнен с возможностью приведения в действие указанного гидравлического привода (15) для перемещения спиральной пружины (11) в заданное положение, так что клиренс транспортного средства в режиме с жесткостью K1 может быть меньше, чем в режиме с жесткостью 1/K1+1/K2.
5. Система по п. 4, в которой спиральная пружина (11) сжата в заданном положении для обеспечения более низкого клиренса.
| US 2006197301 A1, 07.09.2006 | |||
| FR 1153797 A, 21.03.1958 | |||
| RU 2012103250 A, 27.07.2014. |

