Настоящее изобретение относится к устройству и способу измерения времени прохождения вершин лопаток в ступени турбомашины, такой как авиационный турбореактивный или турбовинтовой двигатель.
Известно, что двухконтурная турбомашина содержит вентилятор, на выходе которого поток воздуха делится на поток первичного воздуха, циркулирующий внутри турбореактивного двигателя - в компрессоре, камере сгорания и турбине, и поток вторичного воздуха, циркулирующий вокруг турбореактивного двигателя.
Компрессор содержит множество рядов подвижных лопаток, установленных поочередно с рядами неподвижных лопаток и окруженных корпусом. Для исключения возможности прохождения воздуха в вершине лопатки, которое бы уменьшило коэффициент полезного действия турбомашины, на внутренней поверхности корпуса вентилятора нанесено покрытие из истираемого материала, расположенное перпендикулярно к лопаткам вентилятора.
В процессе работы турбомашины важно знать о деформации подвижных лопаток. С этой целью, как известно, на корпусе устанавливаются датчики, чувствительный элемент которых размещен перпендикулярно к лопаткам. Датчики соединены со средствами обработки информации. Чувствительный элемент каждого датчика позволяет определять прохождение вершины лопатки (в английской терминологии - tip timing), и, таким образом, представляется возможным определить путем сравнения теоретического времени прохождения вершины лопатки с измеренным временем прохождения, тип деформации лопатки, т.е. при изгибе, при кручении..., а также степень деформации.
Однако интеграция датчиков осуществляется путем выполнения отверстий в корпусе перпендикулярно к лопаткам, что делает корпус непрочным и образует полости перпендикулярно к радиально внешним концам лопаток, которые являются источником звукового отрицательного воздействия ввиду прохождения лопаток с большой скоростью.
Другой недостаток заключается в том, что трудно точно узнать относительное осевое расположение датчиков к вершинам лопаток. Данная сложность возникает ввиду накопления допусков при изготовлении рабочего колеса и элементов крепления рабочего колеса на его роторе, который, в свою очередь, имеет осевое расположение относительно корпуса, в котором размещены датчики. Аэродинамические, тепловые и механические напряжения турбомашины в процессе эксплуатации также могут оказывать влияние на относительное осевое расположение вершин лопаток относительно электродов.
Знание этих сведений является, однако, основным для выведения на основе времени прохождения лопаток их деформации в процессе эксплуатации. Действительно, для типа кручения, который, например, заключается в деформации лопатки вокруг ее продольной оси, заданное осевое расположение электрода относительно вершин лопаток может привести к определению вершины лопатки, когда вариант кручения проходит через узел (нулевая деформация), в то время как для другого осевого положения электрода относительно лопаток вершина лопатки может быть определена, когда вариант кручения проходит через нижнюю часть (максимальная деформация), что приводит в первом случае к отсутствию определения деформации лопатки, а во втором случае - к ее определению. Однако без точного предварительного знания осевого положения вершин лопаток относительно электродов невозможно знать, соответствует ли деформация схожей или не схожей деформации осевой кромки лопатки, что не позволяет узнать, должна ли деформация считаться малой или большой.
В случае отсутствия сведений об осевом положении датчиков можно размещать множество датчиков в различных осевых положениях, что усложняет конструктивное исполнение турбомашины.
Известные специалистам устройства позволяют измерять осевое расположение лопаток относительно датчиков. Однако данные устройства оказываются сложными в применении, а также малоточными.
Целью изобретения, в частности, является предложить простое, экономически приемлемое и эффективное решение данных различных проблем.
С этой целью в нем предлагается ступень турбомашины, содержащая емкостный датчик, установленный на корпусе перпендикулярно к траектории прохождения вершин лопаток подвижного рабочего колеса, для измерения времени прохождения вершин лопаток, отличающаяся тем, что датчик содержит по меньшей мере один длинный электрод, закрепленный на внутренней стороне корпуса и ориентированный по диагонали относительно траектории вершин лопаток таким образом, чтобы проходить вдоль оси вращения рабочего колеса поперек траекториям, по меньшей мере, передних кромок или задних кромок лопаток, а также тем, что расположенный ниже по потоку конец электрода смещен по окружности относительно его расположенного выше по потоку конца в том же направлении, что и задние кромки лопаток относительно передних кромок лопаток.
Комбинация согласно изобретению емкостного датчика с длинным электродом и его расположение поперек траектории, по меньшей мере, передних кромок или задних кромок вершин лопаток позволяет получать информацию о времени прохождения предварительно определенной зоны лопатки, а именно передних или задних кромок лопаток, и это независимо от относительного осевого расположения вершин лопаток относительно датчика.
Таким образом, более нет необходимости точно знать осевое расположение датчиков относительно вершин лопаток. Вместе с тем следует отметить, что оператор, осуществляющий размещение электрода на внутренней стороне корпуса, должен быть уверен, что он будет хорошо размещен поперек траектории, по меньшей мере, передних кромок или задних кромок лопаток для всех рабочих режимов турбомашины.
Согласно изобретению смещение по окружности расположенного ниже по потоку конца электрода относительно его расположенного выше по потоку конца в том же направлении, что и задних кромок лопаток относительно передних кромок лопаток, позволяет гарантировать, чтобы одновременно только одна вершина лопатки располагалась перпендикулярно к электроду, т.е. размещалась на одной линии в радиальном направлении с электродом. Таким образом, получаемые сигналы на выходе датчика относятся исключительно к одной вершине лопатки, что облегчает их интерпретацию.
Предпочтительно размеры и расположение электрода определены таким образом, чтобы он проходил поперек траекторий передних кромок и задних кромок лопаток, что позволяет измерять одним и тем же электродом время прохождения передних кромок и задних кромок лопаток.
Согласно отличительной особенности изобретения электрод проходит по оси, образуя не равный нулю угол с плоскостью, проходящей через переднюю кромку и заднюю кромку лопатки.
Таким образом, в том случае, когда электрод проходит одновременно поперек передних и задних кромок лопаток, первой перед электродом будет проходить передняя кромка, затем перед электродом пройдет оставшаяся часть вершины лопатки, а задняя кромка будет определена по времени последней.
Согласно частному осуществлению изобретения второй длинный электрод закреплен на внутренней стороне корпуса и ориентирован таким образом, чтобы образовывать не нулевой угол с первым электродом. Такое исполнение позволяет при помощи времени прохождения передней кромки и задней кромки данной лопатки перпендикулярно первому электроду и времени прохождения передней кромки и задней кромки этой данной лопатки перпендикулярно ко второму электроду, сопряженных со скоростью вращения лопаток, знать осевое положение передних и задних кромок лопаток относительно корпуса.
Предпочтительно предусмотрены средства для определения профиля зазора между вершиной лопатки и корпусом на основе выходного сигнала датчика и величин калибровки.
Изобретение также относится к турбомашине, такой как турбореактивный двигатель или турбовинтовой двигатель, содержащей по меньшей мере одну ступень, описание которой было приведено ранее.
Предпочтительно датчик (или датчики) покрыт слоем истираемого материала, нанесенного на внутреннюю сторону корпуса перпендикулярно к вершинам лопаток, что позволяет избежать выполнения отверстий для прохода датчиков, как согласно предшествующему уровню техники, и защитить емкостные датчики влажности.
Изобретение также относится к способу измерения времени прохождения вершин лопаток в турбомашине, отличающемуся тем, что он заключается в том, что:
закрепляют по меньшей мере один емкостной датчик с длинным электродом на внутренней стороне корпуса перпендикулярно к траектории вершин лопаток рабочего колеса компрессора турбомашины; причем данный электрод ориентирован по диагонали относительно траектории вершин лопаток таким образом, чтобы проходить вдоль оси вращения рабочего колеса поперек траекторий, по меньшей мере, передних кромок или задних кромок лопаток; причем расположенный ниже по потоку конец электрода смещен по окружности относительно его расположенного выше по потоку конца в том же направлении, что и задние кромки лопаток относительно передних кромок лопаток;
измеряют изменения электрической емкости электрода в зависимости от времени, которые являются результатом прохождений вершин лопаток против электрода, и
выводят на основе этого время прохождения передних и (или) задних кромок лопаток.
Согласно другой отличительной особенности изобретения способ заключается в измерении изменений разницы времени прохождения лопаток между передними кромками и задними кромками лопаток в течение времени и в выведении на основе этого данных касательно деформации кручения или скручивания лопаток вокруг их продольных осей.
Также представляется возможным вывести амплитуду вибрации лопаток или частоту вибрации лопаток при кручении.
Согласно предпочтительному практическому осуществлению способ заключается в том, что:
закрепляют два датчика с длинным электродом вышеупомянутого типа на внутренней стороне корпуса перпендикулярно к лопаткам, причем два электрода образуют между собой не нулевой угол;
измеряют разницу времени прохождения против двух электродов по меньшей мере одной передней кромки и задней кромки данной лопатки;
выводят из разницы времени и скорости вращения лопаток осевое расположение по меньшей мере одной из передних кромок и задних кромок лопаток относительно электрода.
Другие преимущества и отличительные особенности изобретения станут видны при чтении нижеследующего описания, приводимого в качестве примера, не имеющего ограничительного характера, и со ссылкой на прилагаемые чертежи, на которых:
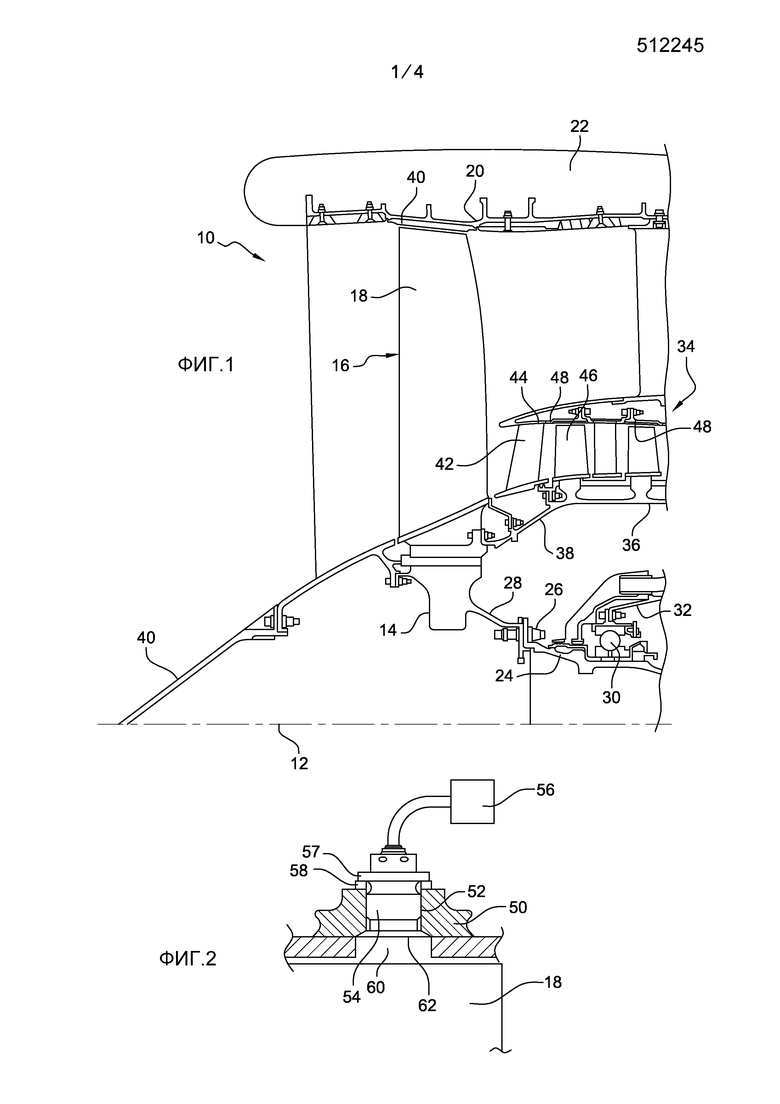
фиг.1 представляет собой схематический вид осевого сечения половины вентилятора турбореактивного двигателя;
фиг.2 представляет собой схематический вид осевого сечения датчика, установленного на корпусе вентилятора, представленного на фиг.1, согласно известному уровню техники;
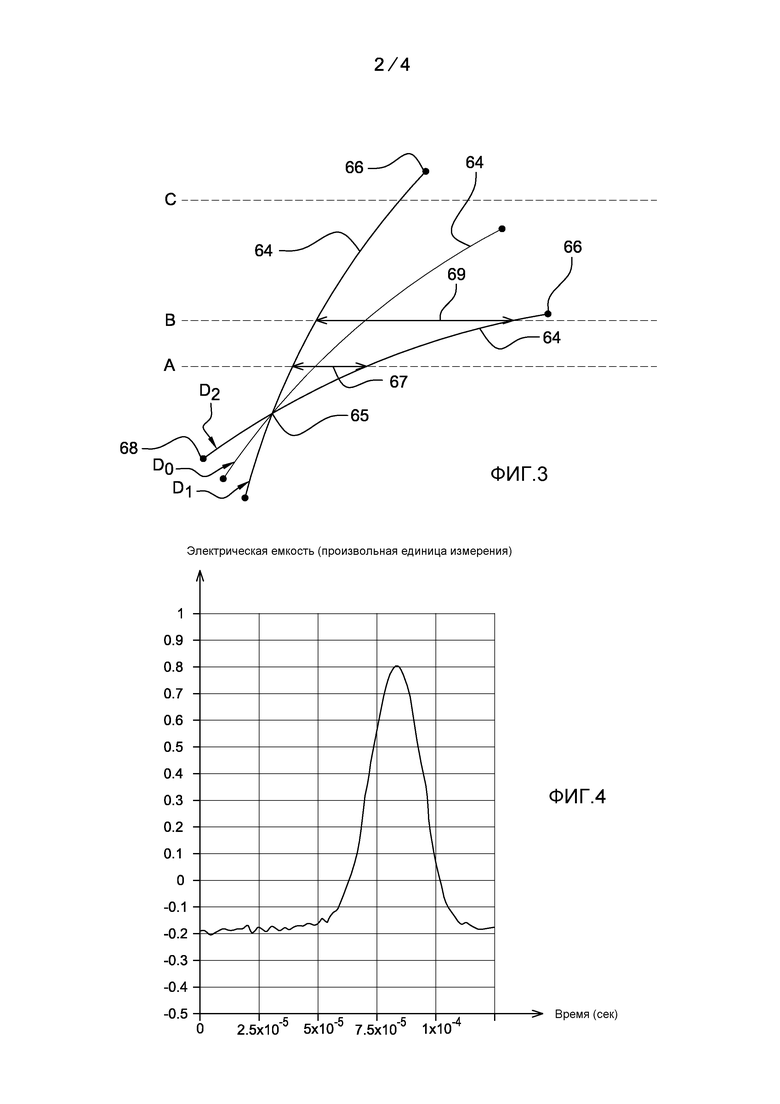
фиг.3 схематически изображает деформацию кручения или скручивания лопатки по продольной оси, проходящей через корневую часть и вершину лопатки;
фиг.4 представляет собой график временного определения прохождения вершин лопаток перпендикулярно к датчику на основе известного уровня техники;
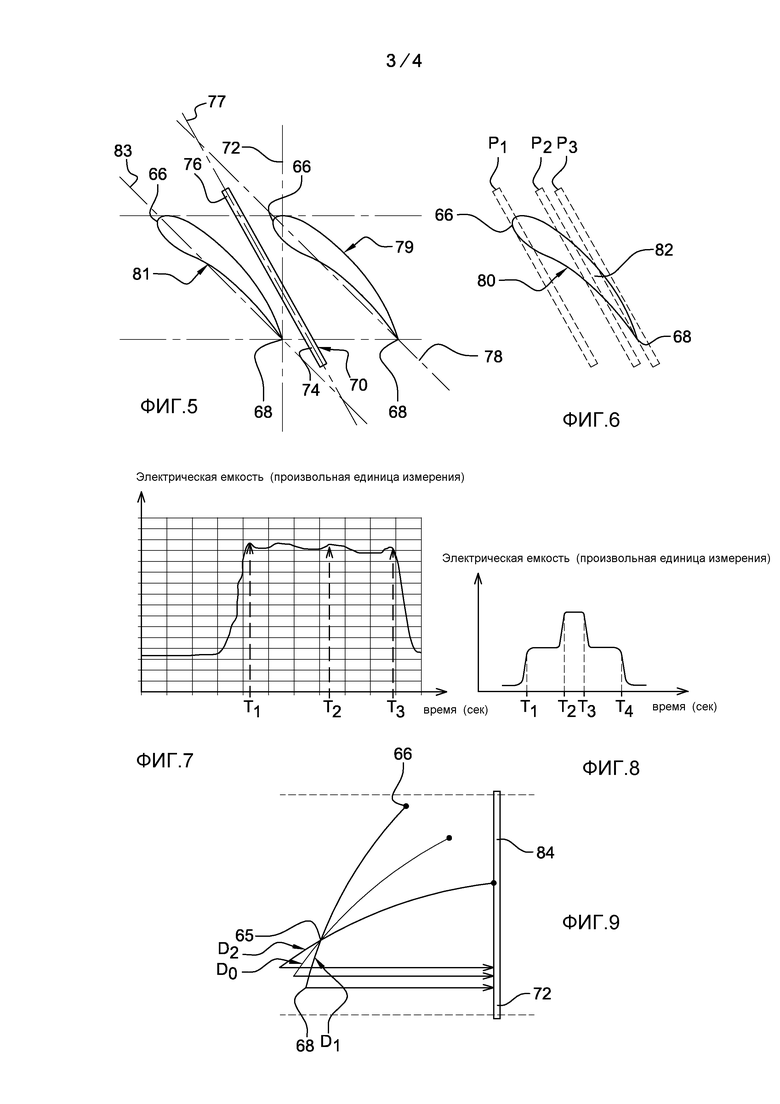
фиг.5 представляет собой схематический вид сверху двух вершин, расположенных друг за другом лопаток и длинного датчика согласно изобретению;
фиг.6 представляет собой схематическое изображение перемещения вершины лопатки против длинного электрода согласно изобретению;
фиг.7 представляет собой график изменения электрической емкости, измеренной длинным электродом, в зависимости от времени при прохождении лопаток против электрода, представленного на фиг.5;
фиг.8 представляет собой график, изображающий изменение электрической емкости в зависимости от различного расположения длинного электрода относительно вершин лопаток;
фиг.9 представляет собой схематическое изображение деформации кручения или скручивания лопатки по продольной оси, проходящей через коренную часть и вершину лопатки, и длинного электрода, согласно изобретению;
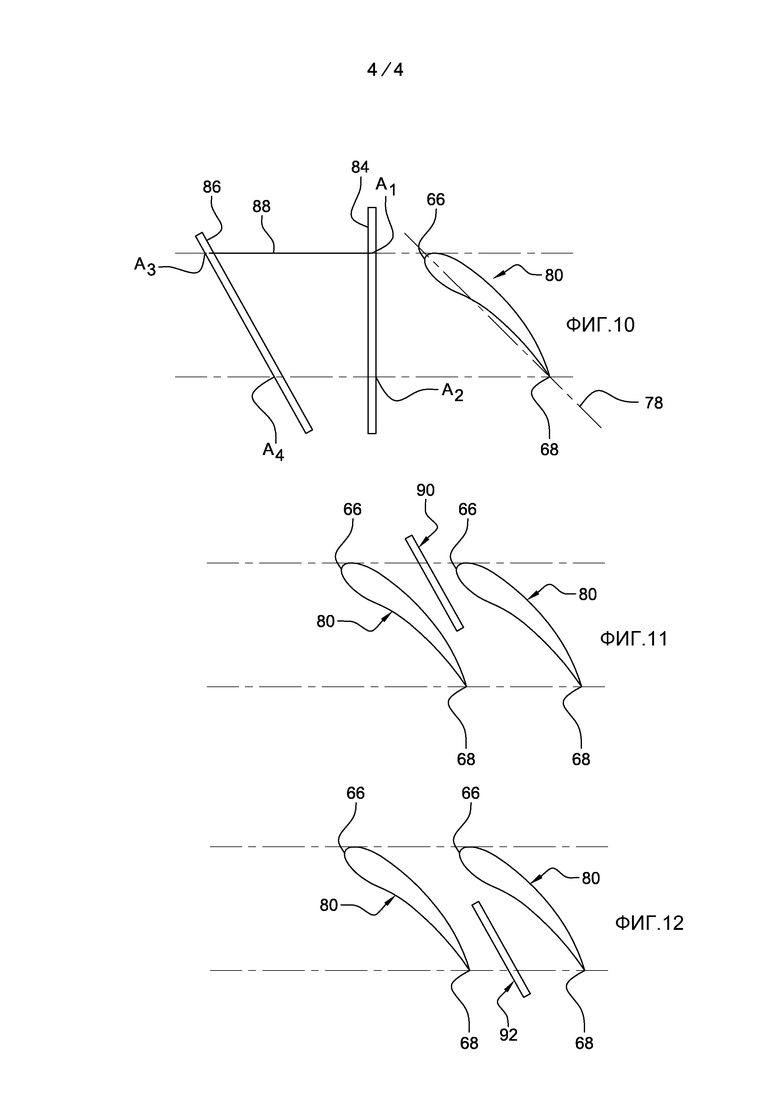
фиг.10 представляет собой схематический вид сверху двух длинных электродов согласно изобретению и вершины лопатки;
фиг.11 и 12 схематически изображают варианты практического осуществления изобретения.
Вначале ссылка делается на фиг.1, на которой изображен вентилятор 10 турбомашины с осью 12, содержащий рабочее колесо, образованное диском 14, по окружности которого установлено множество лопаток 16, коренные части которых посажены в канавки диска 14, а перья 18 радиально проходят наружу в направлении корпуса 20 вентилятора, удерживающего гондолу 22, окружающую снаружи лопатки 16. Рабочее колесо вентилятора приводится во вращение вокруг оси 12 турбомашины посредством вала 24, прикрепленного болтами 26 к имеющей форму усеченного конуса стенке 28, жестко соединенной с рабочим колесом вентилятора. Вал 24 удерживается и направляется подшипником 30, который удерживается расположенным выше по потоку концом кольцевого кронштейна 32, прикрепленного сзади к промежуточному корпусу (не изображен), расположенному ниже по потоку от компрессора низкого давления 34, ротор 36 которого жестко соединен с рабочим колесом вентилятора посредством соединительной стенки 38.
Корпус вентилятора 20 содержит на внутренней стороне покрытие из истираемого материала 40, нанесенное перпендикулярно к лопаткам 16 вентилятора и предназначенное для истирания во время контакта с радиально внешними концами лопаток 16. Этот слой истираемого материала 40 позволяет уменьшить зазоры между вершинами лопаток 16 и корпусом вентилятора 20 и оптимизировать, таким образом, эксплуатационные характеристики турбомашины.
Компрессор низкого давления 34 содержит чередование неподвижных лопаток 42, закрепленных на внешнем корпусе 44, и подвижных рабочих колес 46, удерживаемых ротором 36. Каждое подвижное рабочее колесо 46 содержит множество лопаток, равномерно распределенных вокруг оси 12 турбомашины, и снаружи окружено слоем 48 истираемого материала, нанесенного на внутреннюю поверхность корпуса 44 компрессора низкого давления.
Для измерения времени прохождения лопаток и выведения на основе этого их деформации в процессе эксплуатации на корпусе 20 вентилятора 10 расположено множество датчиков (фиг.2). Данный корпус 20 содержит бобышки 50, образованные на его внешней поверхности и разнесённые по окружности одни от других. Каждая бобышка 50 содержит отверстие 52, выходящее внутрь корпуса 20 в тракт течения потока воздуха, и заключает в себе датчик 54, по существу, цилиндрической формы, соединенный проводом со средствами обработки 56. Каждый датчик 54 на своем радиально внешнем конце содержит кольцевое основание 57. Между основанием 57 и внешней поверхностью бобышки 50 установлена кольцевая вставка 58. Данная вставка 58 обеспечивает регулировку уровня установки датчика внутри отверстия. Каждый датчик 54 вставляется с внешней стороны корпуса внутрь отверстия 52, а толщина вставки 58 такова, что активная сторона датчика находится смещенной назад внутрь отверстия 52 относительно выхода отверстия в тракт течения воздуха. Слой истираемого материала 40 покрывает внутреннюю поверхность корпуса, за исключением устьев отверстий 52. Таким образом, между радиально внешними концами лопаток 16 и активной стороной или электродом 62 каждого датчика 54 образована полость 60.
Как ранее объяснялось, для определения деформации лопаток в процессе эксплуатации необходимо знать осевое расположение датчиков относительно вершин лопаток.
На фиг.3 схематически изображена вершина 64 лопатки в недеформированном состоянии D0 и два состояния деформация D1, D2 кручения лопатки вокруг продольной оси 65, вытянутой между ее корневой частью и ее вершиной. Лопатка содержит переднюю кромку 66 и заднюю кромку 68.
Предположим, что имеется три возможных осевых положения A, B, C датчика относительно лопатки. Для первого положения A, при переходе лопатки в состояние деформации D1 перед электродом, датчик регистрирует изменение электрической емкости (в произвольной единице измерения, см. фиг.4) в зависимости от времени. Эта кривая проходит через максимальную величину амплитуды, которой соответствует время, представляющее собой время прохождения зоны A1 вершиной лопатки 64 перпендикулярно к электроду.
Путем применения множества датчиков, установленных по окружности вокруг оси корпуса, представляется возможным измерять время перехода лопатки в состояние деформации D2.
Путем сравнения теоретического времени прохождения лопатки, соответствующего нулевой деформации, и моментов времени прохождения лопатки, когда лопатка деформирована в соответствии с состояниями D1 и D2, представляется возможным оценить деформацию лопатки (двусторонняя стрелка 67).
Когда датчик находится в осевом положении B, соответствующем положению, которое ближе к передней кромке, чем положение A, отмечается, что оценка деформации будет предоставлять большую величину деформации (двусторонняя стрелка 69) для идентичной вместе с тем реальной деформации.
Когда датчик находится в положении C, соответствующем положению, очень близкому к передней кромке, отмечается, что производить оценку деформации лопатки не представляется возможным, поскольку лопатка будет проходить перед датчиком, только находясь в состоянии деформации D2.
Таким образом, наблюдается, что для двух расположений A, B представляется возможным оценивать деформацию, а для расположения C это не представляется возможным. Кроме того, в двух первых случаях (A, B) факт невозможности иметь информацию об осевом положении датчиков относительно лопаток не позволяет узнать, измеренная деформация была ли получена на конце лопатки или в срединной части, что не позволяет определить уровень оцененной деформации.
Изобретение, таким образом, предлагает решение данного недостатка, а также ранее указанных отрицательных моментов при помощи по меньшей мер, одного емкостного датчика, содержащего прямой электрод 70, закрепленный на внутренней стороне корпуса.
Электрод 70 проходит вдоль оси вращения 72 и поперек траектории лопаток таким образом, что, по меньшей мере, передние кромки 66 или задние кромки 68 лопаток проходят перпендикулярно к электроду 70, который удерживается корпусом.
Размеры электрода 70 и его расположение на корпусе определены таким образом, что определение передних кромок или задних кромок могло бы быть осуществлено независимо от состояния деформации лопатки. На практике для гарантированного обеспечения такого определения датчик должен достаточно проходить выше по потоку или ниже по потоку от передней кромки или задней кромки соответственно для обеспечения ее гарантированного определения электродом (см. фиг.9, на которой изображено несколько состояний деформации лопатки).
Согласно первому осуществлению изобретения, изображенному на фиг.5, электрод 70 проходит одновременно поперек траекторий передних кромок и задних кромок лопаток. Такое расположение позволяет электроду определить прохождение одновременно передних кромок 66 и задних кромок 68 лопаток.
Расположенный ниже по потоку конец 74 электрода 70 смещен по окружности относительно его расположенного выше по потоку конца 76 в том же направлении, что и задние кромки 68 лопаток относительно передних кромок 66 лопаток.
Предпочтительно, как это показано на фиг.5, когда прямой электрод 70 расположен между двумя вершинами соседних лопаток 79, 81, ось 77 прямого электрода 70 образует не нулевой угол с плоскостями 78, 83, содержащими переднюю кромку 66 и заднюю кромку 68 лопаток 79, 81. Ось 77 пересекает плоскость 78 выше по потоку от передней кромки 66 лопатки 79 и пересекает плоскость 83 ниже по потоку от задней кромки 68 лопатки 81. Таким образом, можно гарантировать, что первым перед прямым электродом 70 будет проходить передняя кромка 66, затем перед электродом пройдет оставшаяся часть вершины лопатки вплоть до задней кромки 68.
На фиг.6 изображены три положения P1, P2 и P3 прямого электрода относительно вершины лопатки 80. Для облегчения представления изображены три положения одного и того же электрода 70, хотя именно лопатка будет смещаться относительно электрода 70.
Первое положение P1 электрода соответствует положению, в котором передняя кромка 66 лопатки расположена перпендикулярно к прямому электроду 70, что соответствует моменту t1 на фиг.7. Второе положение P2 электрода соответствует положению, в котором срединная часть 82 вершины лопатки 80 расположена перпендикулярно к электроду 70, что соответствует моменту t2 на фиг.7. И, наконец, третье положение P3 электрода 70 соответствует положению, в котором задняя кромка 68 лопатки расположена перпендикулярно к прямому электроду 70, что соответствует моменту t3 на фиг.7.
Таким образом, для каждой лопатки, которая проходит перпендикулярно прямому электроду 70, расположенному поперек траекторий передних кромок и задних кромок и частично проходящему по оси вращения, получают выходной сигнал датчика, тип которого представлен на фиг.7, в котором первая максимальная величина, достигаемая в момент t1, соответствует обнаружению передней кромки 66 лопатки, а последняя максимальная величина, достигаемая в момент t3, соответствует обнаружению задней кромки 68 лопатки.
Между моментами t1 и t3 наблюдается изменение электрической емкости, которое отражает изменение зазора между вершиной лопатки 80 и электродом 70 от передней кромки 66 до задней кромки 68.
Перед установкой электрода 70 на корпусе производится калибровка амплитуды электрической емкости в зависимости от расстояния между вершиной лопатки 80 и электродом 70 и в зависимости от положения электрода 70 перпендикулярно к вершине лопатки 80. Для этого передняя кромка 66 лопатки 80 располагается перпендикулярно к электроду 70 и путем приближения вершины лопатки 80 к электроду 70 осуществляется множество измерений электрической емкости электрода 70. Данная операция повторяется для множества последовательных положений Pi электрода 70 перпендикулярно к вершине лопатки 80 до расположения P3 электрода 70 перпендикулярно задней кромке 68 лопатки 80. Посредством таких различных измерений получают кривую калибровки амплитуды электрической емкости в зависимости от расстояния электрода 70 перпендикулярно к вершине лопатки 80 для каждого положения вершины лопатки 80 относительно электрода 70, что позволяет на основе этого вывести изменения зазора вдоль вершины лопатки 80.
Отметим, что калибровка множества положений вершины лопатки 80 перпендикулярно к электроду 70 необходима ввиду того, что поверхность вершины лопатки 80, расположенной перпендикулярно к электроду 70, изменяется. Это схематически изображено на фиг.6, на которой поверхность S1, определенная электродом 70 в положении Pi, слабее, чем поверхность S2, определенная электродом 70 в положении P2.
Зная зазор ji в вершине лопатки для каждого момента ti между моментами t1 и t3, вычисление 
Таким образом, в отличие от предшествующего уровня техники, согласно которому можно определить только зазор каждой части вершины лопатки, которая проходит перпендикулярно к электроду, представляется возможным узнать, какая зона вершины лопатки 80 ближе всего к корпусу и будет способна с ним соприкасаться. Изобретение позволяет, таким образом, осуществлять определение зазора ji между вершиной лопатки и корпусом от расположенного выше по потоку конца вершины лопатки 80, соединяющего переднюю кромку 66, до расположенного ниже по потоку конца вершины лопатки 80, соединяющего заднюю кромку 68.
В практическом осуществлении, изображенном на фиг.5, отмечается, что электрод 70 наклонен относительно оси 72 таким образом, что вершина 80 только одной лопатки может располагаться перпендикулярно к электроду в каждый момент времени. Данный тип установки позволяет упростить интерпретацию электрических сигналов, получаемых на выходе датчика.
Однако в случае электрода, ориентированного по оси вращения 72 лопаток, передняя кромка 66 первой лопатки и задняя кромка 68 второй соседней лопатки были бы одновременно обнаружены электродом, что привело бы к увеличению электрической емкости, измеренной датчиком. Была бы получена кривая типа, представленного на фиг.8, содержащая три горизонтальных участка, первый из которых между t1 и t2 соответствует прохождению первой лопатки перпендикулярно к электроду, второй горизонтальный участок кривой между t2 и t3 соответствует одновременному определению вершины первой лопатки и вершины второй лопатки, третий горизонтальный участок кривой между t3 и t4 соответствует определению вершины только второй лопатки.
С таким размещением можно в полной мере получить время прохождения передних кромок 66 и задних кромок 68 каждой из лопаток. Однако оценка зазоров в вершинах лопаток считается более сложной ввиду аддитивности электрических емкостей, источником которых являются две лопатки, перпендикулярные к электроду, не позволяющая отличить, какая из двух частей каждой лопатки, определенных в один и тот же момент, расположена ближе или дальше от электрода.
Фиг.9 представляет собой вид, аналогичный изображенному на фиг.3 согласно предшествующему уровню техники, в который добавлен прямой электрод 84, ориентированный по оси вращения 72 лопаток. Когда лопатка находится в своем недеформированном состоянии Do, она проходит перпендикулярно к электроду 84 между моментами t1 и t2. В состоянии деформации D1 она проходит перпендикулярно к электроду между моментами t1′ и t2′. И, наконец, в своем состоянии деформации D2 она проходит перпендикулярно к электроду между моментами t1′′ и t2′′. Моменты времени t1, t1′ и t1′′ соответствуют моментам времени прохождения передних кромок 66 лопатки, а моменты времени t2, t2′ и t2′′ соответствуют моментам времени прохождения задних кромок 68 лопатки.
Изменение между моментами времени t1, t1′ и t1′′ указывает на вибрационную активность лопатки на уровне ее передней кромки 66, в то время как изменение между моментами времени t2, t2′ и t2′′ указывает на вибрационную активность лопатки на уровне ее задней кромки 68. Изменение между разницами моментов времени t1-t2, t1′-t2′ и t1′′-t2′′ указывает на кручение или скручивание лопатки по ее продольной оси 65.
Таким образом, согласно изобретению представляется возможным получить доступ к информации о времени прохождения передних кромок 66 и задних кромок 68 лопаток, не зная при этом предварительно осевого положения электрода 84 относительно лопаток.
Согласно отдельному практическому осуществлению изобретения второй прямой электрод 86 закреплен на внутренней стороне корпуса и ориентирован таким образом, чтобы образовывать не нулевой угол с первым электродом 84 и плоскостью 78, проходящей через переднюю кромку и заднюю кромку лопатки (фиг.10).
Когда вершина лопатки 80 проходит перпендикулярно к первому электроду 84, то он фиксирует в точке A1 время прохождения t1 передней кромки 66, а в точке A2 - время прохождения t2 задней кромки 68. При прохождении вершины лопатки 80 перпендикулярно ко второму электроду 86 последний фиксирует в точке A3 - время прохождения t3 передней кромки 66, а в точке A4 время прохождения t4 задней кромки 68.
Разница времени t3-t1, умноженная на скорость вращения (rad.s-1) лопаток, позволяет получить оценку длины дуги (в радианах), которую проходит передняя кромка 66, между точками A1 и A3. Данной величине дуги соответствует единственная дуга 88, проходящая в круговом направлении и пересекающая два электрода 84, 86, что позволяет получить реальные положения точек A1 и A3 на электродах и, таким образом, осевое расположение передних кромок 66 относительно корпуса. Аналогичным образом, используя разницу времени t4-t2, представляется возможным получить осевое расположение задних кромок 68 лопаток.
Однако данный способ вычисления предполагает, что амплитуда деформации лопатки является незначительной с учетом длины дуги, которую проходит лопатка, что на практике обычно и случается. В конструкторском исполнении, в котором деформация лопатки не будет незначительной с учетом длины дуги, которую проходит лопатка, представляется возможным выполнить цифровые обработки, такие как, например, средние величины времени t3-t1 и t4-t2, на базе множества оборотов.
В том случае, когда имеется намерение получить данные, связанные исключительно с передними кромками 66 или задними кромками 68 лопаток, представляется возможным определить размеры и расположение электродов 90, 92 таким образом, чтобы они проходили исключительно через передние кромки 66 (фиг.11) или задние кромки 68 (фиг.12) лопаток соответственно.
В описании, выполненном со ссылкой на чертежи, электроды 70, 84, 86, 90, 82 имеют прямую форму. Однако следует понимать, что электроды могут иметь длинную форму, не оставаясь при этом прямыми. В этом случае электроды способны иметь изогнутую форму, адаптированную таким образом, чтобы проходить вдоль оси вращения 72 рабочего колеса поперек траекториям, по меньшей мере, передних кромок 66 или задних кромок 66 лопаток. Возможны также и другие формы электродов, такие как, например, зигзагообразная, представляющая собой чередование изогнутых частей или также чередование прямолинейных частей, расположенных встык.
Если описание изобретения было приведено с привязкой к турбомашине, то понятно, однако, что изобретение применимо к любым узлам механизма, содержащего корпус и рабочее колесо с лопатками, вращающимися внутри корпуса, на котором установлен по меньшей мере один электрод, размеры и размещение которого определены, как описано выше.
В частности, изобретение применимо к вентилятору турбомашины, как это описывалось ранее и изображено на фиг.1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ДЕТАЛИ В ТУРБОМАШИНЕ | 2012 |
|
RU2598906C2 |
| КОМПОЗИЦИОННАЯ ЛОПАТКА ДЛЯ КОМПРЕССОРА ОСЕВОЙ ТУРБОМАШИНЫ И ТУРБОМАШИНА | 2016 |
|
RU2714385C2 |
| СПОСОБ И СИСТЕМА МЕХАНИЧЕСКОЙ ОБРАБОТКИ ВЕРШИНЫ | 2017 |
|
RU2726303C1 |
| Профилированная аэродинамическая конструкция и турбомашина для летательного аппарата (варианты) | 2019 |
|
RU2782555C2 |
| КОЛЬЦЕВОЙ ПОТОЧНЫЙ КАНАЛ ДЛЯ ТУРБОМАШИНЫ С ПРОХОДЯЩИМ В ОСЕВОМ НАПРАВЛЕНИИ ОСНОВНЫМ ПОТОКОМ, А ТАКЖЕ КОМПРЕССОР, СОДЕРЖАЩИЙ ТАКОЙ ПОТОЧНЫЙ КАНАЛ | 2007 |
|
RU2397373C1 |
| КОНТРОЛЬ ЗАЗОРА У ВЕРШИНЫ ЛОПАТОК В ТУРБИНЕ ВЫСОКОГО ДАВЛЕНИЯ ТУРБОМАШИНЫ | 2008 |
|
RU2472001C2 |
| ЛОПАТКА ТУРБИНЫ И СПОСОБ ИЗГОТОВЛЕНИЯ СИСТЕМЫ ЛОПАТОК ТУРБИНЫ | 2015 |
|
RU2656176C2 |
| ВЕНТИЛЯТОР | 2013 |
|
RU2636974C2 |
| ВЕНТИЛЯТОР ДЛЯ ТУРБОМАШИНЫ | 2014 |
|
RU2683343C1 |
| СТАТОР ОСЕВОЙ ТУРБОМАШИНЫ С ЭЛЕРОНАМИ В ХВОСТОВИКАХ ЛОПАТОК | 2014 |
|
RU2586426C2 |
Изобретение относится к метрологии, в частности к средствам контроля лопаток турбин компрессора. Устройство содержит емкостный датчик, установленный на корпусе перпендикулярно к траектории прохождения вершин лопаток подвижного рабочего колеса. Датчик представляет собой продолговатый электрод, закрепленный на внутренней стороне корпуса и ориентированный по диагонали относительно траектории вершин лопаток таким образом, чтобы проходить вдоль оси вращения рабочего колеса поперек траекториям кромок лопаток. При этом расположенный ниже по потоку конец электрода смещен по окружности относительно его расположенного выше по потоку конца в том же направлении, что и задние кромки лопаток относительно передних кромок лопаток. На основе изменения электрической емкости во времени и соответствующего сигнала определяют время прохождения лопаток. Технический результат - повышение точности контроля. 3 н. и 7 з.п. ф-лы, 12 ил.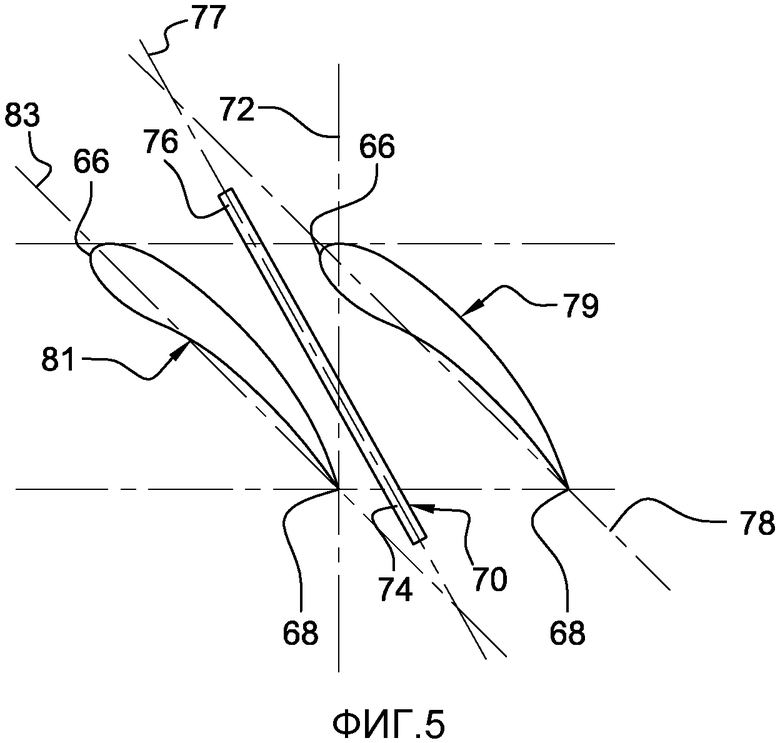
1. Ступень турбомашины, такая как ступень сжатия, содержащая емкостный датчик, установленный на корпусе перпендикулярно к траектории прохождения вершин (80) лопаток подвижного рабочего колеса для измерения времени прохождения вершин лопаток, отличающаяся тем, что датчик содержит по меньшей мере один длинный электрод (70, 90, 92), закрепленный на внутренней стороне корпуса и ориентированный по диагонали относительно траектории вершин лопаток (80) таким образом, чтобы проходить вдоль оси вращения (72) рабочего колеса поперек траекториям, по меньшей мере, передних кромок (66) или задних кромок (68) лопаток, а также тем, что расположенный ниже по потоку конец (74) электрода (70) смещен по окружности относительно его расположенного выше по потоку конца (76) в том же направлении, что и задние кромки (68) лопаток относительно передних кромок (66) лопаток.
2. Ступень по п.1, отличающаяся тем, что размеры и расположение электрода (70) определены таким образом, чтобы он проходил поперек траекторий передних кромок (66) и задних кромок (68) лопаток.
3. Ступень по п.1, отличающаяся тем, что электрод (70) проходит согласно оси, образуя не нулевой угол с плоскостью (78), проходящей через переднюю кромку (66) и заднюю кромку (68) лопатки.
4. Ступень по п.1, отличающаяся тем, что она содержит второй длинный электрод (86), закрепленный на внутренней стороне корпуса и ориентированный таким образом, чтобы образовывать не нулевой угол с первым электродом (84).
5. Ступень по п.1, отличающаяся тем, что она содержит средства определения профиля зазора между вершиной лопатки (80) и корпусом на основе выходного сигнала датчика и величин калибровки.
6. Турбомашина, такая как турбореактивный двигатель или турбовинтовой двигатель, отличающаяся тем, что она содержит по меньшей мере одну ступень по п.1.
7. Турбомашина по п.6, отличающаяся тем, что датчик покрыт слоем истираемого материала, нанесенного на внутреннюю сторону корпуса, перпендикулярно к вершинам лопаток.
8. Способ измерения времени прохождения вершин лопаток в турбомашине, отличающийся тем, что он заключается в том, что:
закрепляют по меньшей мере один емкостной датчик с длинным электродом (70) на внутренней стороне корпуса перпендикулярно к траектории вершин лопаток рабочего колеса компрессора турбомашины; причем данный электрод (70) ориентирован по диагонали относительно траектории вершин лопаток таким образом, чтобы проходить вдоль оси вращения (72) рабочего колеса поперек траекториям, по меньшей мере, передних кромок (66) или задних кромок (68) лопаток; причем расположенный ниже по потоку конец (74) электрода (70) смещен по окружности относительно его расположенного выше по потоку конца (76) в том же направлении, что и задние кромки (68) лопаток относительно передних кромок (66) лопаток;
измеряют изменения электрической емкости электрода (70) в зависимости от времени, являющиеся результатом прохождений вершин лопаток (80) против электрода, и
выводят на основе этого время прохождения передних кромок (66) и/или задних кромок (68) лопаток.
9. Способ по п.8, отличающийся тем, что он заключается в измерении изменений разницы времени прохождения лопаток между передними кромками (66) и задними кромками (68) лопаток в течение времени и в выведении на основе этого данных относительно кручения или скручивания лопаток вокруг их продольных осей (65).
10. Способ по п.8, отличающийся тем, что он заключается в том, что:
закрепляют два датчика с длинным электродом (84, 86) вышеупомянутого типа на внутренней стороне корпуса перпендикулярно к лопаткам, причем два электрода (84, 86) образуют между собой не нулевой угол;
измеряют разницу времени прохождения против двух электродов (84, 86) по меньшей мере одной из передней кромки (66) и задней кромки (68) данной лопатки и
выводят из разницы времени и скорости вращения лопаток осевое расположение по меньшей мере одной из передних кромок (66) и задних кромок (68) лопаток относительно электрода (84, 86).
| US 4813273 A1, 21.03.1989 | |||
| US 3208269 A1, 28.09.1965 | |||
| СПОСОБ ЛАЗЕРХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ОЧАГОВОГО ХОРИОРЕТИНИТА | 2011 |
|
RU2455968C1 |
| US 5450760 A1, 19.09.1995 | |||
| US 7582359 B2, 01.09.2009 | |||
| EP 1972884 A1, 24.09.2008 | |||
| СПОСОБ ИЗМЕРЕНИЯ И КОНТРОЛЯ РАДИАЛЬНО-ОСЕВЫХ ЗАЗОРОВ В ТУРБОМАШИНАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2280238C1 |
| US 4955269 A1, 11.09.1990 | |||
| US 7625169 B2, 01.12.2009.. | |||

