Изобретение относится к машиностроению и может быть использовано, например, для балансировки роторов.
В технике широко известны балансировочные станки с приводом вращения изделия, содержащие станину с установленной на ней гибкой опорой для размещения балансируемого изделия, датчики вибрации, установленные на опоре. Гибкая опора выполнена в виде люлек двух раздельных опор, закрепленных на станине, люльки опор соединены с их корпусами на податливой подвеске из двух стальных лент, обеспечивающих зарезонансный режим балансировки (Основы балансировочной техники под редакцией Щепетильникова В.А. М.: Машиностроение, 1975, т. 2, с. 371). Однако данная структура колебательной системы балансировочного станка не обладает достаточной линейностью, что приводит к погрешности процесса балансировки.
Известен также балансировочный станок, содержащий основание, размещенные на нем две направляющие, гибкую опору, выполненную в виде двух параллельно установленных стоек, размещенных с возможностью перемещения вдоль направляющих, двух люлек для размещения балансируемого объекта, каждая из которых соединена с соответствующей стойкой шарнирно посредством тяг и размещена с возможностью плоскопараллельного перемещения относительно стойки, фазоотметчик вращения балансируемого объекта, первый и второй датчики информационного сигнала и микропроцессорный блок обработки сигнала, отличающийся тем, что датчики информационного сигнала выполнены в виде датчиков виброускорения, каждый из которых размещен на соответствующей люльке гибкой опоры, а микропроцессорный блок обработки сигнала выполнен в виде последовательно соединенных коммутатора, блока фильтров, аналого-цифрового преобразователя, микропроцессора и блока отображения информации, блока задания режимов измерения, выход которого соединен со вторым входом микропроцессора, с третьим входом которого соединен выход фазоотметчика вращения балансируемого объекта и второй вход аналого-цифрового преобразователя, второй и третий выходы микропроцессора соединены соответственно с первым входом коммутатора и вторым входом блока фильтров, второй и третий входы коммутатора соединены соответственно с выходом первого и второго датчиков виброускорения. (Смотри Патент РФ 2046310). Из этого же патента известна колебательная система балансировочного станка, содержащая тяги и люльку для крепления массы балансируемого объекта (см. Фиг. 2Г).
Известный "Балансировочный станок" является ближайшим аналогом по технической сущности и достигаемому результату к предложенному техническому решению и принят за прототип. Известный станок обеспечивает высокую точность уравновешивания и надежность эксплуатации. Однако, поскольку колебательная система этого станка представляет собой вариант математического маятника, то при приемлемых габаритных размерах не может быть достигнута достаточно низкая частота собственных колебаний, поэтому балансировка на этом станке производится на больших оборотах ротора, что требует больших энергетических затрат, а для некоторых типов роторов неприменима ввиду недостаточной жесткости ротора или значительного взаимодействия с окружающим воздухом.
Целью изобретения является создание балансировочного станка с колебательной зарезонансной системой со сверхнизкой собственной частотой при сохранении габаритных размеров на уровне, удобном в конструктивном отношении.
Это обеспечивается тем, что балансировочный станок, содержащий основание, параллельно размещенные на нем направляющие 9, податливую опору, выполненную в виде одной, двух или более параллельно установленных стоек, размещенных с возможностью перемещения вдоль направляющих, и колебательных систем, содержащих люльки для размещения балансируемого объекта, соединенные с соответствующей стойкой шарнирно посредством опорной и подвесной тяг и размещенные с возможностью плоскопараллельного перемещения относительно стойки, фазоотметчик вращения балансируемого объекта, датчики вибрации и измерительный блок.
Станок оснащен колебательной системой, выполненной в виде как минимум одной подвесной и одной опорной тяг так, что подвесные тяги верхним концом закреплены с возможностью качания на неподвижной части стойки, а нижним концом закреплены с возможностью качания на люльке, опорные тяги закреплены верхним концом с возможностью качания на люльке, а нижним концом закреплены с возможностью качания на неподвижной части стойки. Это обеспечивается тем, что балансировочный станок содержит несколько стоек с колебательными системами. Это также обеспечивается тем, что тяги выполнены регулируемой длины и в балансировочном станке место укладки (монтажа) балансируемого объекта выполнено с возможностью перемещения. Это обеспечивается также тем, что колебательная система преимущественно балансировочного станка содержит тяги и люльку для крепления массы, где тяги состоят из подвесной и опорной тяг, так что подвесные тяги верхним концом закреплены с возможностью качания на неподвижной части стойки, а нижним концом закреплены с возможностью качания на люльке, опорные тяги закреплены верхним концом с возможностью качания на люльке, а нижним концом закреплены с возможностью качания на неподвижной части стойки. Тяги могут быть выполнены регулируемой длины. В колебательной системе место укладки (монтажа) массы выполнено с возможностью перемещения.
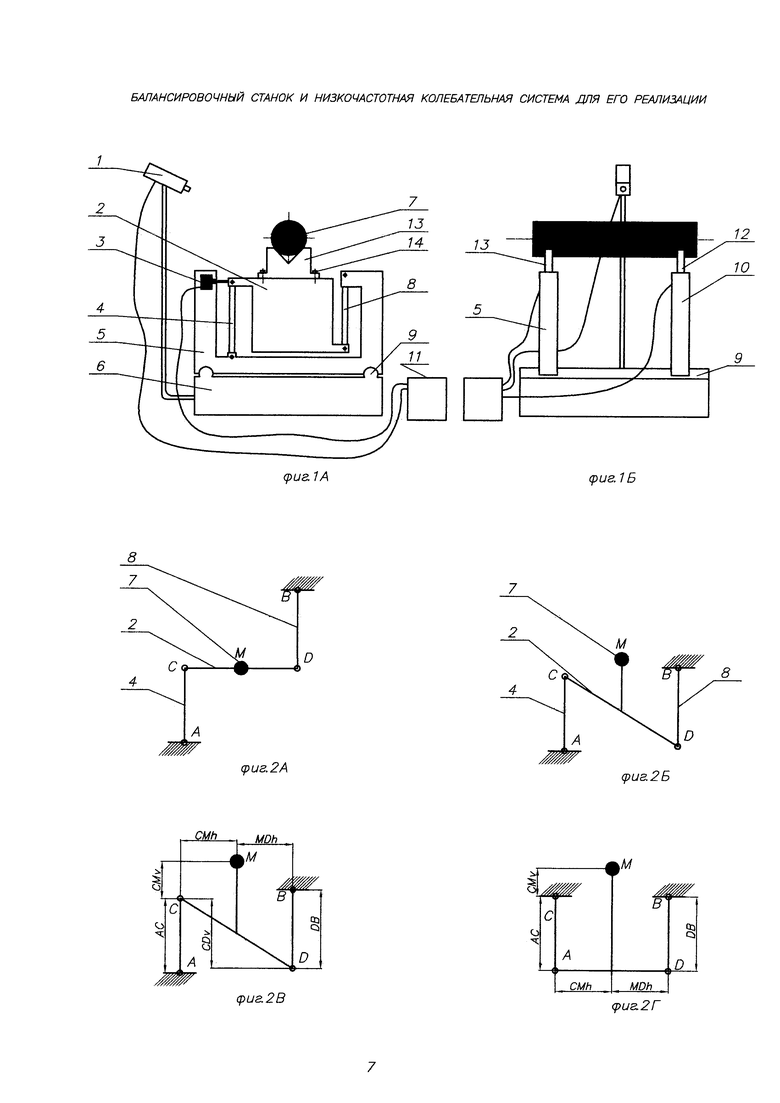
На фиг. 1А схематично изображен балансировочный станок, вид сбоку;
на фиг. 1Б схематично изображен балансировочный станок, вид спереди;
на фиг. 2А - схема колебательной системы;
на фиг. 2Б - схема колебательной системы - вариант;
на фиг. 2В - схема варианта колебательной системы с обозначением характерных размеров для расчета;
на фиг. 2Г - схема колебательной системы-прототипа с обозначением характерных размеров для расчета.
Балансировочный станок (фиг. 1А и 1Б) содержит основание 6, параллельно размещенные на нем направляющие 9, податливую опору, выполненную в виде одной, двух или более параллельно установленных стоек (5, 10), размещенных с возможностью перемещения вдоль направляющих 9, и колебательных систем, содержащих люльки 2, 12 (по числу стоек, на фиг. 1 изображен вариант с двумя стойками) для размещения балансируемого объекта 7, соединенные с соответствующей стойкой шарнирно посредством опорной 4 и подвесной 8 тяг и размещенные с возможностью плоскопараллельного перемещения относительно стойки, фазоотметчик 1 вращения балансируемого объекта 7, датчики вибрации 3 и измерительный блок 11. Станок оснащен колебательной системой с применением сочетания опорных 4 и подвесных тяг 8.
Балансировочный станок работает следующим образом.
Балансируемый объект 7 (например, ротор) размещается на призматических опорах 13, 12 и включает привод (не показан) вращения вала. После разгона ротора до требуемой скорости начинается процесс измерения дисбаланса. При этом неуравновешенность ротора 7 вызывает центробежные силы, возбуждающие колебания ротора и люлек 2, преобразуемые датчиками вибрации 3 в электрические сигналы, которые усиливаются и передаются в измерительный блок 11. Фазоотметчик дает один импульс на каждый оборот ротора при прохождении «нулевой точки». Это дает информацию о мгновенном угловом положении ротора для представления центробежных сил в полярной системе координат.
На основании сигналов с датчиков вибрации, сигнала с датчика «нулевой точки» измерительный блок выводит на экран информацию об углах и амплитудах дисбалансов по каждой плоскости измерения. Проведя соответствующие расчеты, учитывая накопленные данные измерений и матрицы динамических коэффициентов влияния, измерительный блок выводит на экран массы и углы установки корректирующих (балансировочных) грузов по каждой плоскости коррекции с учетом взаимного влияния плоскостей. По полученным значениям производится установка требуемых корректирующих масс, т.е. осуществляется балансировка одним из известных способов.
Колебательная система станка (фиг. 2А и 2Б), состоящая из:
a) шарнирно закрепленного за точку В подвесной тяги 8,
b) шарнирно закрепленной за точку А опорной тяги 4,
c) шарнирно соединенной за концы с тягами 8 и 4 люльки 2,
d) массы 7, закрепленной на люльке 2. (7 - балансируемый объект).
Шарниры и оси тяг 4 и 8 и люльки 2 все лежат в одной плоскости, позволяют колебания только в этой плоскости (совпадает с плоскостью рисунка).
Если принять массу тяг 4 и 8 и люльки 2 равной нулю, трение и люфт во всех шарнирах равное нулю, то при условии, что длина B-D равна длине А-С, центр масс массы 7 совпадает с точкой М, лежащей на отрезке CD, а длины M-D и С-М равны, то при небольших угловых отклонениях тяг от вертикали система имеет безразличное равновесие, т.е. бесконечный период собственных колебаний (нулевая частота).
Рассмотрим влияние соотношения длин (плеч) в системе на частоту собственных колебаний системы. При этом будем каждый раз менять только одну длину при сохранении остальных длин равными начальным (как в предыдущем абзаце).
Уменьшение длины B-D за счет сдвига вниз точки В приводит к тому, что система приобретает свойство устойчивого равновесия и равновесным является такое состояние, когда обе тяги вертикальны. При этом частота собственных колебаний становится больше нуля и монотонно увеличивается по мере уменьшения длины B-D. Увеличение длины B-D делает систему неустойчивой, поэтому данный случай не рассматривается.
Увеличение длины А-С за счет сдвига вниз точки А приводит к тому, что система приобретает свойство устойчивого равновесия и равновесным является такое состояние, когда обе тяги вертикальны. При этом частота собственных колебаний становится больше нуля и монотонно увеличивается по мере уменьшения длины А-С. Уменьшение длины А-С делает систему неустойчивой, поэтому данный случай не рассматривается.
Увеличение длины С-М за счет сдвига точки М ближе к точке D приводит к тому, что система приобретает свойство устойчивого равновесия и равновесным является такое состояние, когда обе тяги вертикальны. При этом частота собственных колебаний становится больше нуля и монотонно увеличивается по мере увеличения длины С-М (и уменьшения длины M-D). Обратный сдвиг точки М в сторону точки С делает систему неустойчивой, поэтому данный случай не рассматривается.
Таким образом, изменяя соотношения вышеуказанных длин, можно сконструировать колебательную систему с устойчивым равновесием и любой, наперед заданной частотой собственных колебаний, при условии, что она будет меньше собственной частоты соразмерного математического маятника, при любых, наперед заданных габаритных размерах системы.
Собственную частоту колебаний системы определяют при проектировании.
Возможно конструктивно предусмотреть оперативную перестройку этого параметра при наладке станка на тот или иной тип балансируемого объекта. Это может быть реализовано посредством применения тяг 4 и 8 регулируемой длины, перемещением места укладки (монтажа) балансируемого объекта 7.
Ниже приведены результаты расчетов периода собственных колебаний Т и их частоты F при трех вариантах следующих характерных размеров колебательной системы. Для наглядности также приведено значение эффективной длины L эквивалентного математического маятника с такой же собственной частотой.
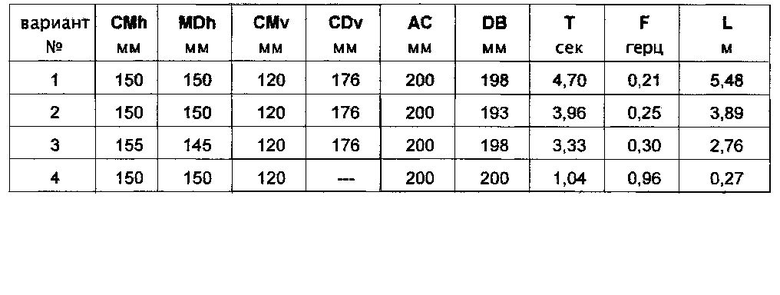
Как видно из сравнения вариантов 1 и 2, а также 1 и 3, при небольших изменениях характерных размеров достигаются существенные изменения собственной частоты F.
Для сравнения приведен вариант №4 - колебательная система прототипа - схема на фиг. 2Г. Как видно из сравнения собственной частоты F для варианта 1 и 4, реализация колебательной системы предлагаемой конструкции с указанными характерными размерами позволяет в тех же габаритах снизить собственную частоту в 4,52 раза. Тот же результат с применением конструкции прототипа мог бы быть достигнут лишь при увеличении размеров в 20,3 раз.
Также может быть балансировочный станок, в котором колебательная система состоит из двух, трех и более рассмотренных выше единичных колебательных систем. При этом эти единичные колебательные системы располагаются в параллельных плоскостях так, что в состоянии равновесия точки М всех колебательных систем лежат на одной прямой.
| название | год | авторы | номер документа |
|---|---|---|---|
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 1994 |
|
RU2046310C1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 1991 |
|
RU2028590C1 |
| СТАНОК ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2010 |
|
RU2455624C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ И КОЛЕБАТЕЛЬНАЯ СИСТЕМА БАЛАНСИРОВОЧНОГО СТАНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2077035C1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2007 |
|
RU2339926C1 |
| БАЛАНСИРОВОЧНЫЙ СТЕНД С ВЕРТИКАЛЬНОЙ ОСЬЮ ВРАЩЕНИЯ | 2004 |
|
RU2292533C2 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 2014 |
|
RU2561249C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2627968C1 |
| Балансировочный станок | 1983 |
|
SU1144015A1 |
| Балансировочный станок | 1978 |
|
SU684359A1 |
Изобретения относятся к балансировочной технике и могут быть использованы для балансировки роторов. Балансировочный станок содержит основание, стойку и колебательную систему, содержащую люльку, подвесную тягу и опорную тягу. Балансируемый ротор размещают на люльке, после разгона дисбаланс ротора вызывает колебания люлек, преобразуемые датчиками вибрации в электрические сигналы, поступающие в измерительный блок. Фазоотметчик дает импульс на каждый оборот ротора. Измерительный блок выводит на экран результат замера дисбалансов. Станок оснащен колебательной системой, выполненной в виде как минимум одной подвесной и одной опорной тяг. При этом подвесные тяги верхним концом закреплены с возможностью качания на неподвижной части стойки, а нижним концом закреплены с возможностью качания на люльке, опорные тяги закреплены верхним концом с возможностью качания на люльке, а нижним концом закреплены с возможностью качания на неподвижной части стойки. Станок содержит несколько стоек с колебательными системами. Конструкция колебательной системы позволяет регулировать ее собственную частоту. Тяги выполнены регулируемой длины, и в станке место укладки (монтажа) балансируемого объекта выполнено с возможностью перемещения. Технический результат заключается в возможности балансировки на сверхнизких частотах вращения. 2 н. и 5 з.п. ф-лы, 6 ил. 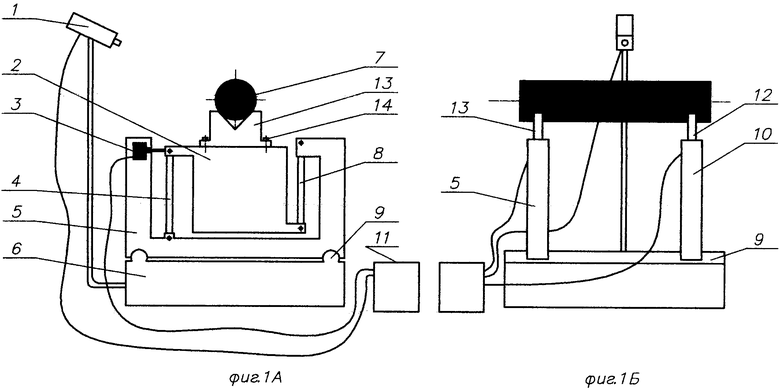
1. Балансировочный станок, содержащий основание, размещенную на нем гибкую опору, выполненную в виде стойки с люлькой для размещения балансируемого объекта, люлька соединена со стойкой шарнирно посредством тяг и размещена с возможностью плоскопараллельного перемещения относительно стойки, фазоотметчик вращения балансируемого объекта, датчик вибрационного сигнала и измерительный блок, отличающийся тем, что он оснащен колебательной системой, выполненной в виде как минимум одной подвесной и одной опорной тяги, так что подвесные тяги верхним концом закреплены с возможностью качания на неподвижной части стойки, а нижним концом закреплены с возможностью качания на люльке, опорные тяги закреплены верхним концом с возможностью качания на люльке, а нижним концом закреплены с возможностью качания на неподвижной части стойки.
2. Балансировочный станок по п. 1, отличающийся тем, что он содержит несколько стоек с колебательными системами.
3. Балансировочный станок по п. 1, отличающийся тем, что тяги выполнены регулируемой длины.
4. Балансировочный станок по п. 1, отличающийся тем, что место укладки (монтажа) балансируемого объекта выполнено с возможностью перемещения.
5. Колебательная система преимущественно балансировочного станка, содержащая тяги и люльку для крепления массы, отличающаяся тем, что тяги состоят из подвесной и опорной тяг, так что подвесные тяги верхним концом закреплены с возможностью качания на неподвижной части стойки, а нижним концом закреплены с возможностью качания на люльке, опорные тяги закреплены верхним концом с возможностью качания на люльке, а нижним концом закреплены с возможностью качания на неподвижной части стойки.
6. Колебательная система преимущественно балансировочного станка по п. 5, отличающаяся тем, что тяги выполнены регулируемой длины.
7. Колебательная система преимущественно балансировочного станка по п. 5, отличающаяся тем, что место укладки (монтажа) массы выполнено с возможностью перемещения.
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 1994 |
|
RU2046310C1 |
| СТАНОК ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2010 |
|
RU2455624C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ РТУТНЫХ ВЫПРЯМИТЕЛЕЙ | 1940 |
|
SU63527A1 |

