Группа изобретений относится к области машиностроения, а именно к способам балансировки и балансировочной технике, она может быть использована для динамической балансировки различных тел вращения, например роторов, турбин, компрессоров.
Из "Уровня техники" известен балансировочный станок, содержащий станину, привод вращения балансируемого ротора, два опорных узла с поджимными пружинами, каждый из которых включает кронштейн с датчиком колебаний и опорными роликами для установки балансируемого ротора. Каждый опорный узел включает датчик веса, соединенный с блоком управления, и линейную направляющую с установленными на ней основной кареткой, на которой закреплен кронштейн, и по бокам от нее вспомогательными каретками, на которых со стороны основной каретки расположены поджимные пружины. Причем вспомогательные каретки снабжены фиксирующими элементами с противоположно направленными резьбами, установленными на снабженном резьбой стержне, связанным с валом электродвигателя, и обеспечивают возможность регулируемого поджатая и освобождения основной каретки в соответствии с сигналом, подаваемым блоком управления на электродвигатель (см. патент РФ №2561249, кл. МПК G01M 1/22, опубл. 27.08.2015).
Недостатки известного устройства заключаются в недостаточно высокой точности, обусловленной трением в подвижных каретках и массой опорных узлов, и низких функциональных возможностях, связанной со сложностью механизма изменения жесткости измерительной системы, кроме этого переключение из режима в режим осуществляется последовательно.
Также из "Уровня техники" известен способ балансировки ротора, согласно которому устанавливают ротор на опорах, соединенных с вибровоспринимающими резонаторами, разгоняют его до выбранной частоты вращения, регистрируют колебания ротора, определяют дисбаланс и устраняют его. До начала вращения вводят в автоматический оперативный блок исходные параметры балансировки, например массу ротора и требуемую точность балансировки, определяют на их основе режим балансировки: дорезонансный, резонансный или зарезонансный. По команде оперативного блока автоматически устанавливают соответствующие выбранному режиму собственную частоту вибровоспринимающих резонаторов и частоту вращения ротора (см. патент РФ №2544359, кл. МПК G01M 1/16, опубл. 20.03.2015).
Недостатки известного способа заключаются в сложности изготовления вибровоспринимающих резонаторов с изменяемой собственной частотой и высокие требования к жесткости опорной системы и фундаменту станка при работе в дорезонансном режиме балансировки.
Задачей настоящей группы изобретений является устранение вышеуказанных недостатков.
Технический результат заключается в повышении точности и функциональных возможностей устройства за счет обеспечения возможности одновременного измерения дисбаланса изделия как в зарезонансном, так и дорезонансном режиме.
Технический результат обеспечивается тем, что устройство для балансировки ротора включает основание, привод вращения, роликовые блоки, две анизотропные опоры. Каждая опора содержит датчики, регистрирующие вертикальную динамическую силу, действующую на опору, и датчики, регистрирующие виброперемещение опоры в горизонтальной плоскости. При этом в вертикальном направлении опоры устройства выполнены жесткими с возможностью функционирования в дорезонансном режиме, а в горизонтальном направлении, перпендикулярном оси вращения опоры устройства выполнены податливыми с возможностью функционирования в зарезонансном режиме.
В соответствии с частным случаем выполнения устройство имеет следующие особенности.
Опоры могут быть выполнены в виде сварных стоек. При этом к каждой опоре с помощью сферического шарнира одним концом прикреплены подвижные элементы. При этом другим концом подвижные элементы жестко прикреплены к траверсе. На траверсе закреплена гайка, в которую ввернут винт, на котором в свою очередь шарнирно закреплен роликовый блок. Кроме того, роликовый блок имеет возможность поворота относительно оси винта, а вместе с траверсой он имеет возможность перемещения с помощью подвижных элементов, шарнирно прикрепленных к опорам. При этом обеспечивается возможность поворота роликового блока относительно двух взаимно перпендикулярных осей. Также роликовый блок имеет возможность перемещения в вертикальном и горизонтальном направлениях, что обеспечивает возможность линейного контакта опорных роликов с балансируемым ротором. Кроме того, измерительное устройство выполнено с возможностью измерение дисбаланса одновременно как в дорезонансном, так и в зарезонансном режиме.
Каждая опора может быть снабжена маятниковой подвеской со встроенными тензодинамометрами, измеряющими вертикальную динамическую силу, действующую на каждую опору, и акселерометр, измеряющий виброперемещение в горизонтальном направлении.
Каждая опора может быть снабжена упругой подвеской с упругим элементом, содержащим тензорезисторы, наклеенные на конструктивные элементы пониженной жесткости, измеряющие вертикальную динамическую силу, действующую на опору, и акселерометр, измеряющий виброперемещение опоры в горизонтальном направлении.
Каждая опора может быть снабжена шарнирной подвеской со встроенными датчиком виброускорения и датчиком измерения динамической силы.
Технический результат обеспечивается тем, что способ балансировки ротора с использованием устройства включает размещение ротора на опорах, определение положения центра масс и веса ротора, разгон его до выбранной частоты вращения, регистрацию колебаний ротора, определение дисбаланса для последующего устранения. Измерение дисбаланса производят одновременно как в дорезонансном режиме, так и в зарезонансном режиме, при этом в вертикальном направлении замеряют динамическую силу, действующую на опору, а в горизонтальном направлении измеряют виброперемещение опоры.
Сущность настоящей группы изобретений поясняется следующими иллюстрациями:
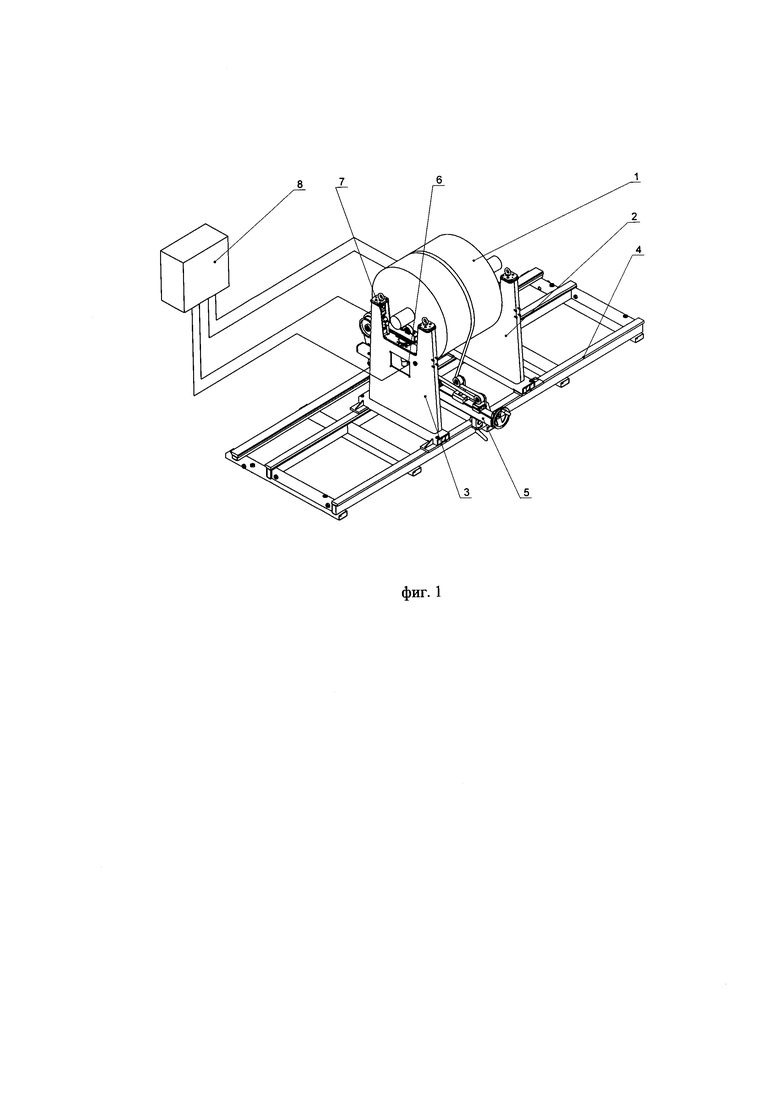
фиг. 1 отображает общий вид устройства;
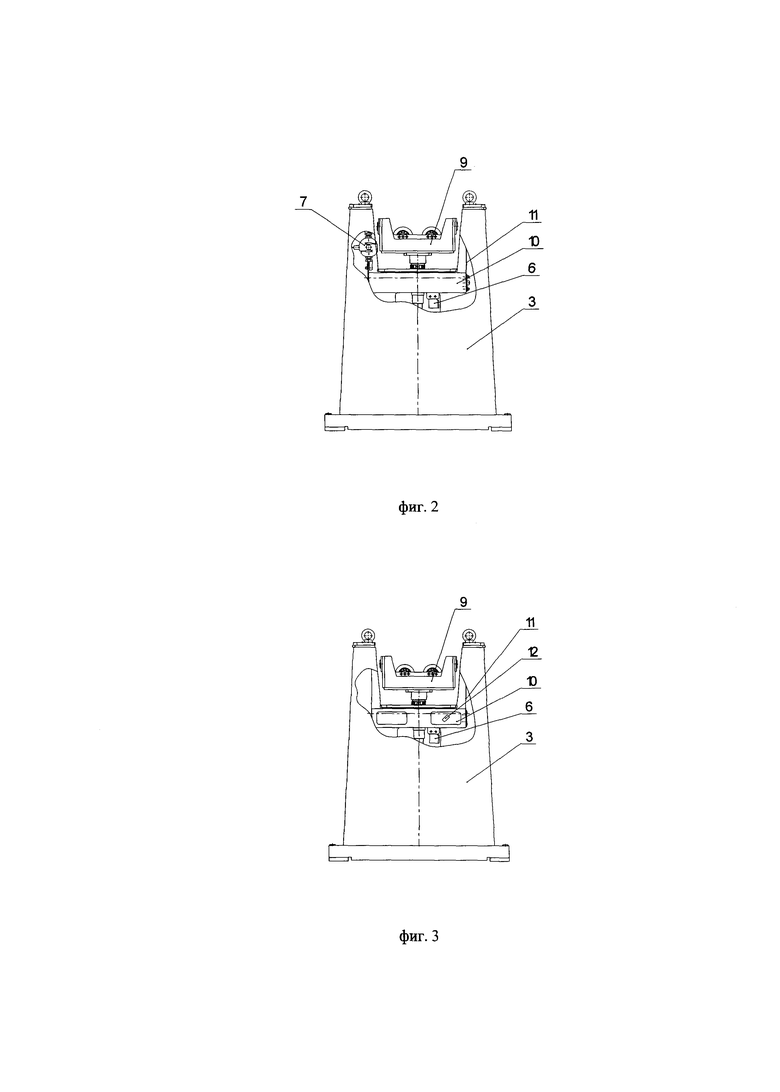
фиг. 2 отображает опору балансировочного станка с упругой подвеской, в которую встроены датчик виброускорения и датчик измерения динамической силы в виде тензодатчика в отдельном корпусе;
фиг. 3 отображает опору балансировочного станка с упругой подвеской, в которую встроены датчик виброускорения и датчик измерения динамической силы, содержащий двутавровую балку с наклеенными на нее тензорезисторами;
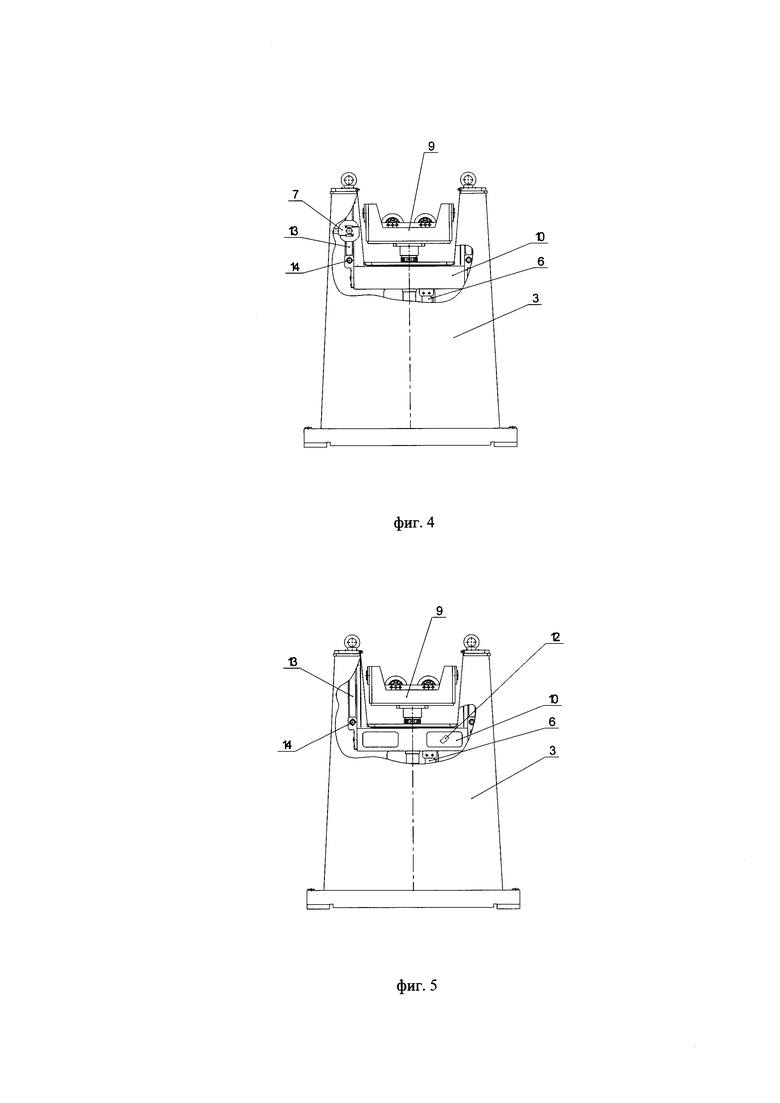
фиг. 4 отображает опору балансировочного станка с шарнирной подвеской, в которую встроены датчик виброускорения и датчик измерения динамической силы в виде тензодатчика в отдельном корпусе;
фиг. 5 отображает опору балансировочного станка с шарнирной подвеской, в которую встроены датчик виброускорения и датчик измерения динамической силы, выполненным в виде двутавровой балки с наклеенными тензорезисторами.
На иллюстрациях отображены следующие элементы:
1 - Балансируемый ротор;
2 - Опора правая;
3 - Опора левая;
4 - Основание;
5 - Привод вращения;
6 - Датчик измерения виброперемещения;
7 - Датчик измерения динамической силы;
8 - Измерительно-балансировочный прибор;
9 - Роликовый блок с цилиндрическими роликами;
10 - Траверса;
11 - Упругий элемент;
12 - Тензорезистор;
13 - Тяга;
14 - Шарнир.
Устройство для балансировки ротора 1 включает опору правую 2, опору левую 3, основание 4, привод вращения 5, датчик измерения виброперемещения 6, датчик измерения динамической силы 7, измерительно-балансировочный прибор 8, роликовые блоки с цилиндрическими роликами 9, траверсу 10, упругий элемент 11. В качестве датчика, измеряющего вертикальную динамическую силу, устройство может содержать тензорезистор 12, закрепленный на траверсе специальной формы. К каждой опоре 2, 3 прикреплены подвижные элементы. При этом за счет данного конструктивного исполнения обеспечивается максимальная жесткость опор 2, 3 в вертикальном направлении, а в горизонтальном направлении, перпендикулярном оси вращения ротора, обеспечивается податливость с возможностью перемещения.
Подвижные элементы могут быть выполнены в виде подвешенных тяг 13, каждая из которых одним концом через сферический шарнир связана со опорой 2,3, а вторым концом через цилиндрический шарнир жестко связана с траверсой 10 (по частному случаю осуществления).
Подвижные элементы могут быть выполнены в виде упругих элементов 11 из металлической ленты или синтетических материалов (с основой из полимерного материала), каждая из которых одним концом через сферический шарнир связана с опорой 2,3, а вторым концом жестко связана с траверсой 10.
При этом на траверсе закреплена гайка, в которую ввернут винт, на котором в свою очередь шарнирно закреплен роликовый блок 9. Кроме того, роликовый блок 9 имеет возможность поворота относительно оси винта, а вместе с траверсой 10 он имеет возможность перемещения с помощью подвижных элементов. При этом обеспечивается возможность поворота роликового блока 9 относительно двух взаимно перпендикулярных осей, а также роликовый блок 9 имеет возможность перемещения в вертикальном и горизонтальном направлениях. Кроме того, измерительное устройство выполнено с возможностью измерения дисбаланса одновременно как в дорезонансном, так и в зарезонансном режиме.
Каждая опора 2, 3 может быть снабжена маятниковой подвеской со встроенными тензодинамометрами, измеряющими вертикальную динамическую силу, действующую на каждую опору, и акселерометр, измеряющий виброперемещение в горизонтальном направлении.
Каждая опора 2, 3 может быть снабжена упругой подвеской с упругим элементом, содержащим тензорезисторы 12, наклеенные на конструктивные элементы пониженной жесткости, измеряющие вертикальную динамическую силу, действующую на опору, и акселерометр, измеряющий виброперемещение опоры в горизонтальном направлении.
Каждая опора 2, 3 может быть снабжена шарнирной подвеской со встроенными датчиком виброускорения и датчиком измерения динамической силы.
Устройство эксплуатируют следующим образом.
Размещают ротор на опорах, разгоняют его до выбранной частоты вращения, регистрируют колебания ротора, определяют дисбаланс. При этом измерение дисбаланса производят одновременно как в дорезонансном режиме, так и в зарезонансном режиме. В вертикальном направлении замеряют динамическую силу, действующую на опору, а в горизонтальном направлении измеряют виброперемещение опоры.
Способ балансировки позволяет одновременно измерять дисбаланс в дорезонансном режиме и в зарезонансном режиме. Для достижения этой цели опоры станка имеют особенности в конструкции. Опоры настоящего устройства являются аномально анзотропными. В вертикальном направлении они выполнены жесткими, а в горизонтальном направлении - податливыми. Во всем рабочем диапазоне частот вращения ротора собственная частота колебаний ротор-опоры в вертикальном направлении существенно больше частоты вращения ротора, а в горизонтальном - существенно меньше. Поэтому во всем рабочем диапазоне частот станок работает в дорезонансном и зарезонансном режиме одновременно.
Для реализации дорезонансного и зарезонансного режима измерения дисбаланса одновременно каждая опора содержит два типа датчиков: датчик силы, измеряющий вертикальную проекцию центробежной силы, и датчик виброперемещения, измеряющий перемещение опоры под действием центробежной силы в горизонтальной плоскости.
Таким образом, чувствительность предлагаемого устройства в горизонтальном направлении постоянна, что позволяет сохранять точность балансировки на низких частотах вращения. В вертикальном направлении опоры станка жесткие, что позволяет определять величину дисбаланса без пробных пусков. Причем чувствительность станка в вертикальном направлении растет с повышением частоты вращения, что позволяет добиться очень высокой точности балансировки. Все эти преимущества позволяют существенно расширить функциональность станка и повысить точность балансировки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2382999C1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 2014 |
|
RU2561249C2 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 1991 |
|
RU2028590C1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК И НИЗКОЧАСТОТНАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2593676C1 |
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |
| СПОСОБ ВЕРТИКАЛЬНОЙ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2017 |
|
RU2674423C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2544359C2 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 1994 |
|
RU2046310C1 |
| СПОСОБ НАСТРОЙКИ БАЛАНСИРОВОЧНОГО СТЕНДА ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МАССОИНЕРЦИОННОЙ АСИММЕТРИИ РОТОРОВ | 2011 |
|
RU2453818C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
Группа изобретений относится к области машиностроения, а именно к способам балансировки и балансировочной технике. Устройство для балансировки ротора включает основание, привод вращения, роликовые блоки, две анизотропные опоры. Каждая опора содержит датчики, регистрирующие вертикальную динамическую силу, действующую на опору, и датчики, регистрирующие виброперемещение опоры в горизонтальной плоскости. При этом в вертикальном направлении опоры устройства выполнены жесткими, а в горизонтальном направлении, перпендикулярном оси вращения, опоры устройства выполнены податливыми с возможностью перемещения. К каждой опоре шарнирно одним концом прикреплены подвижные элементы, при этом другим концом подвижные элементы прикреплены к траверсе, на траверсе закреплена гайка, в которую ввернут винт, на котором в свою очередь шарнирно закреплен роликовый блок, кроме того. Способ балансировки ротора включает размещение ротора на опорах устройства балансировки, разгон его до выбранной частоты вращения, регистрацию колебаний ротора, определение дисбаланса. Измерение дисбаланса производят одновременно как в дорезонансном режиме, так и в зарезонансном режиме. При этом в вертикальном направлении замеряют динамическую силу, действующую на опору, а в горизонтальном направлении измеряют виброперемещение опоры. Технический результат заключается в повышении точности и функциональных возможностей устройства за счет обеспечения возможности одновременного измерения дисбаланса изделия как в зарезонансном, так и дорезонансном режиме. 2 н. и 4 з.п. ф-лы, 5 ил.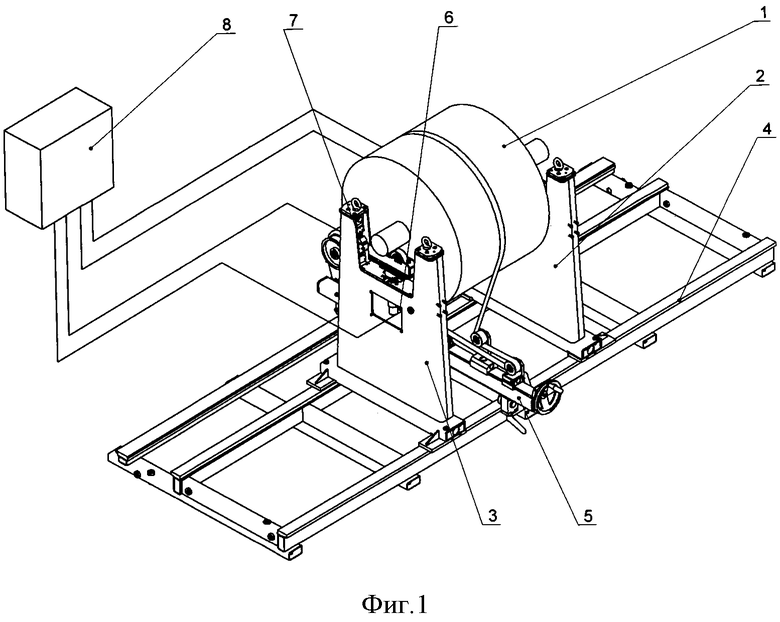
1. Устройство для балансировки ротора, включающее основание, привод вращения, роликовые блоки, две анизотропные опоры, отличающееся тем, что каждая опора содержит датчики, регистрирующие вертикальную динамическую силу, действующую на опору, и датчики, регистрирующие виброперемещение опоры в горизонтальной плоскости, при этом в вертикальном направлении опоры устройства выполнены жесткими с возможностью функционирования в дорезонансном режиме, а в горизонтальном направлении, перпендикулярном оси вращения опоры устройства, выполнены податливыми с возможностью функционирования в зарезонансном режиме.
2. Устройство по п. 1, отличающееся тем, что опоры выполнены в виде сварных стоек, при этом к каждой опоре с помощью сферического шарнира одним концом прикреплены подвижные элементы, при этом другим концом подвижные элементы жестко прикреплены к траверсе, на траверсе закреплена гайка, в которую ввернут винт, на котором в свою очередь шарнирно закреплен роликовый блок, кроме того, роликовый блок имеет возможность поворота относительно оси винта, а вместе с траверсой он имеет возможность перемещения с помощью подвижных элементов, шарнирно прикрепленных к опорам, при этом обеспечивается возможность поворота роликового блока относительно двух взаимно перпендикулярных осей, а также роликовый блок имеет возможность перемещения в вертикальном и горизонтальном направлениях, что обеспечивает возможность линейного контакта опорных роликов с балансируемым ротором, кроме того, измерительное устройство выполнено с возможностью измерения дисбаланса одновременно как в дорезонансном, так и в зарезонансном режиме.
3. Устройство по п. 2, отличающееся тем, что каждая опора снабжена маятниковой подвеской со встроенными тензодинамометрами, измеряющими вертикальную динамическую силу, действующую на каждую опору, и акселерометр, измеряющий виброперемещение в горизонтальном направлении.
4. Устройство по п. 2, отличающееся тем, что каждая опора снабжена упругой подвеской с упругим элементом, содержащим тензорезисторы, наклеенные на конструктивные элементы пониженной жесткости, измеряющие вертикальную динамическую силу, действующую на опору, и акселерометр, измеряющий виброперемещение опоры в горизонтальном направлении.
5. Устройство по п. 2, отличающееся тем, что каждая опора снабжена шарнирной подвеской со встроенными датчиком виброускорения и датчиком измерения динамической силы.
6. Способ балансировки ротора с использованием устройства по любому из пп. 1-5, включающий размещение ротора на опорах, определение положения центра масс и веса ротора, разгон его до выбранной частоты вращения, регистрацию колебаний ротора, определение дисбаланса для последующего устранения, отличающийся тем, что измерение дисбаланса производят одновременно как в дорезонансном режиме, так и в зарезонансном режиме, при этом в вертикальном направлении замеряют динамическую силу, действующую на опору, а в горизонтальном направлении измеряют виброперемещение опоры.
| БАЛАНСИРОВОЧНЫЙ СТАНОК | 2014 |
|
RU2561249C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2544359C2 |
| Способ уравновешивания ротора | 1974 |
|
SU628587A1 |
| Стыковое соединение для температурного шва, например, в бетонных покрытиях | 1960 |
|
SU131486A1 |

