N;
4ib
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛУАВТОМАТИЧЕСКИЙ БАЛАНСИРОВОЧНЫЙ СТАНОК | 2012 |
|
RU2515102C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ И КОЛЕБАТЕЛЬНАЯ СИСТЕМА БАЛАНСИРОВОЧНОГО СТАНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2077035C1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2007 |
|
RU2339926C1 |
| Измерительное устройство баланси-РОВОчНОгО CTAHKA | 1979 |
|
SU838479A1 |
| СТАНОК ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2010 |
|
RU2455624C2 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2002 |
|
RU2225602C2 |
| Способ динамической балансировки роторов | 1982 |
|
SU1167462A1 |
| Балансировочный станок | 1983 |
|
SU1155886A1 |
| БАЛАНСИРОВОЧНЫЙ СТАНОК И НИЗКОЧАСТОТНАЯ КОЛЕБАТЕЛЬНАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2593676C1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
БАЛАНСИРОВОЧНЫЙ СТАНОК ,для уравновешивания роторов изделий в сборе, содержащий основание, установленную на нем при помощи упругих элементов подвижную платформу с опорами для закрепления балансируемого изделия, измерительное устройство для определения параметров дисбаланса с датчиками параметров колебаний платформы и блоком разделения плоскостей Коррекции, привод вращения балансируемого ротора, фазовый детектор и блок регулирования частоты вращения, привода, вход которого соединен с выходом фазового детектора, отличающийся тем, что, с целью повышения точности и производительности балансировки, он снабжен силоизмерительными датчиками, установленными между опорами и платформой и ориентированными в направлении максимальной жесткости упругих (О элементов, и схемой суммирования, входы которой соединены с силоизмес: рительными датчиками, а вьтход - с входом фазового детектора, второй вход которого соединен с блоком разделения плоскостей коррекции.
СП
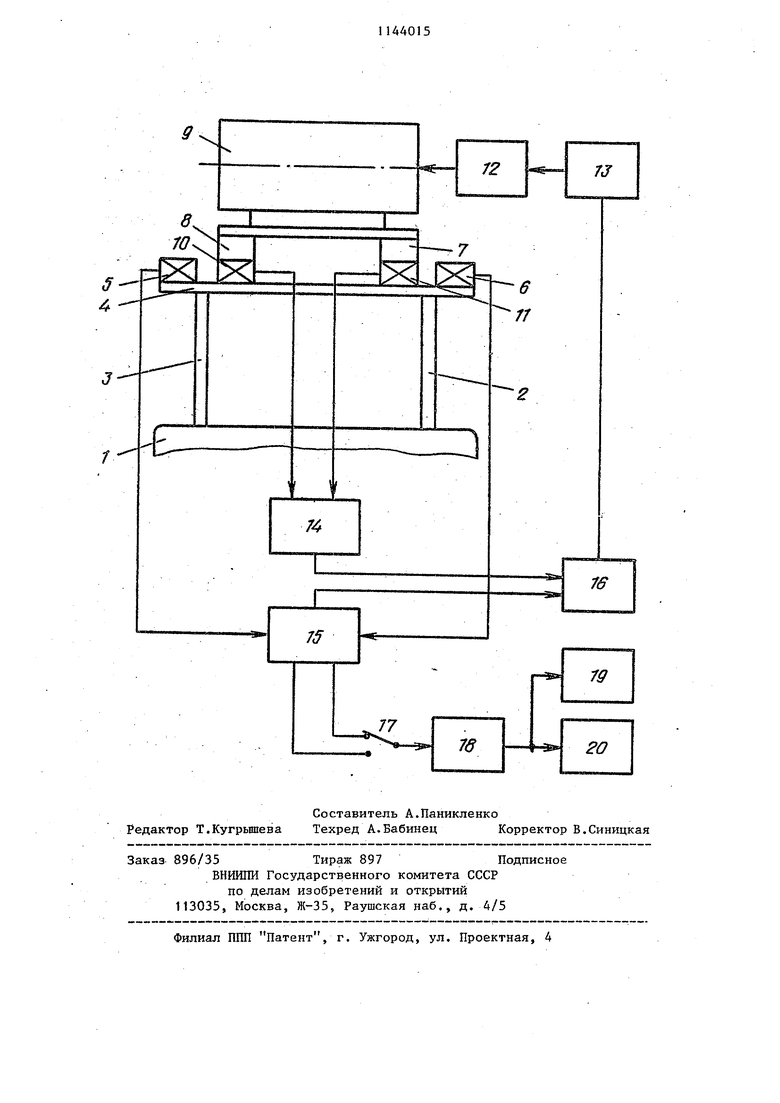
11 Изобретение относится к балансй ровочной технике и может быть использовано для динамической балансировки роторов-изделий в сборе, например, высокооборотных электрических машин, турбомашин, вентиляторов и т.д. Известны станки для динамической балансировки роторов изделий в сборе, содержащее установленную на основании через упругие- элементы подвижную платформу с опорами длязакрепления на них балансируемого изделия, измерительное устройство для определения параметров дисбаланса с датчиками параметров колебательных движений платформы и привод вращения балансируемого ротора с. устройством регулирования частоты вращения Однако при балансировке роторов изделий в сборе в зазорах подшипников ротора возбуждаются- маятниковые колебания ЦАПФ, что нарушает работу блока разделенилплоскостей Koppekции, снижает точность.и производительность процесса балансировки. Наиболее близким техническим решением к изобретению является балансировочный станок, для уравнове- шивания роторов изделий в сборе, содержащий-основание, установленную на нем посредством упругих элементов подвижную платформу с опорами для закрепления балансируемого изделия, измерительноеустройство для определения, параметров дисбаланса с датчиками .параметров колебанийплатформы и блоком разделения плоскостей коррекции, привод вращения балансируемо го ротора, фазовый детектор и блок регулирования частоты вращения приво да , вход которого, соединен с выходом фазового детектора,- а входы последнего соединены-с входом и выходом узкополосного фильтра измерительной системы 2J .Недостаток известного, станка состоит в том, что регулируемый, привод подгхерживйет частоту вращения, равной,резонансной частоте узкополо ного фильтра, которая в процессе ба лансировки может отличаться от резонансной частоты подвижной платформы-Станк9. При этом уменьшается чувствительность, механической. систе мы станка к дисбалансу, ухудшается работа блока разделения плоскостей ,2 коррекции и, следовательно, уменьшается точность и производительность балансировки. Целью изобретения является повышение точности и производительности балансировки. Эта цель достигается тем, что балансировочньй станок-для уравновешивания роторов изделий в сборе, содержащий основание, установленную на нем посредством упругих элементов подвижн:-:о платформу с опарами для закрепления балансируемого изделия, измерительное устройство для определения параметров дисба.ланса с датчиками параметров колебаний платформы и блоком разделения плоскостей коррекции, привод вращения балансируемого ротора, фазовый детектор и блок регулирования частоты вращения привода, вход которого соединен с выходом фазового детектора, снабжен силоизмерительными. датчиками, установленными, опорами и платформой и ориентированными в направлении максимальной жесткости упругих элементов,, и схемой суммирования, входы которой соединены с силоизмерительными датчиками, а выход - с входом фазового детектора, второй вход которого соединен с блоком разделения плоскостей коррекции. На чертеже изображена блок-схема балансировочного станка. Балансировочный станок содержит основание 1, на котором через упругие элементы 2 и 3 закреплена подвижная платформа 4. На платформе 4 установлены датчики 5 и 6 параметров колебаний платформы 4 и опоры 7 и 8 для закрепления балансируемого изделия 9.,Опоры 7 и 8 установлены на платформе 4 через, силоизмерительные датчики.t О и 11, Станок содержит также привод 12 вращения ротора балансируемого изделия 9 .и соединенный с ним блок 13 регулирования частоты вращения. Измерительное устройство станка .содержит схему 14 суммирования, к входам которой подключены силоизмерительные датчики 10 и 11, блок 15 разделения,плоскостей коррекции, к входам которого подключены датчики 5 и 6 параметров колебаний ртатформы 4, фазовьй детектор 16, входы которого подключены к выходам схемы 14 суммирования.и блоку 15 разделения плоскостей коррекции. Выход фазового детектора 16 подключен к входу блока 13 регулирования частоты вращения, а к выходам блока 15 разделения плоскостей коррекции подключены через переключатель 17 левая-правая плоскость коррекции избирательный усилитель.18 и измерительное устройство, включающее измерители величины 19 и угла 20 дисбаланса. Балансировочный станок- работает следующим образом. Балансируемое изделие 9 устанавливают на опоры 7 и 8 и перемещением упругих .элементов 2 и 3 вьфавнивают частоты собственных поступательных и поворотных колебаний платформы А, что обеспечивается при симметричном расположении упругих элементов 2 и 3 относительно центра масс подвижной системы станка на расстояниях, равных радиусу инерции системы. Приводят ротор балансируемого изделия 9 во вращение с частотой, равной частотам собственных колебаний платформы 4. . На частоте, резонанса разность фаз между возбуждающей силой- и пере мещением платформы 4 равна 90. Для правильного -измерения возбуждающей силы силоизмерительные. датчи ки 10 и 11 ориентированы в направле нии .максимальной жесткости упругих iэлементов 2 и 3 На чертеже это.вер тикальное направление; В этом случа ,возбуждающая сила измеряется с миIнимальными- искажениями вносимыми инерцией массы подвижной.системы. I Колебания платформы с установленным изделием происходят в горизонталь- :ном направлении,.в котором и ориентированы датчики 5 и 6. В этом случае сдвиг фаз на резонансной частоте между сигналом с силоизмерительных датчиков ЛО к 11 после схемы I5Л суммирования и сигналом с датчиков 5 и 6 после блока разделения плоскостей коррекции равен 90 , если в качестве датчиков 5 и 6 параметров колебательных движений платформы 4 используются датчики скорости и, следовательно, сигнал на выходе фазового детектора 16 равен нулю. Если частота вращения ротора по каким-либо, причинам изменится, то разность фаз будет отличаться от 90 . На выходе фазового детектора появится напряжение, которое, действуя на блок 13 регулирования частоты вращения,изменит скорость вращения привода 12 балансируемого изделия 9 так, чтобы колебания платформы происходили на резонансной . частоте.. . ... Применение силоизмерчтельных датчиков, регистриру1011,1х воздействие неуравновешенных сил балансируемого ротора на,механическую систему станка, позволяет точно поддерживать per жим резонансных.колебаний, так как сигнал,-управляющий работой блока регулирования частоты вращения ротора, получают непосредственно от механической системы станка. Использование режима резонансных колебаний существенно повышает точность балансировки за счет увеличения чувствительности .механической системы станка к дисбалансам ротора« а равенство собственных частот поступательных и поворотных колебаний платформы обеспечивает одинаковые масштабы статических и моментных дисбалансов ротора, при этом горизонтальные движения ротора - линейно зависят- от дисбалансов,, что улучшает работу блока разделения плоскостей коррекции и значительно повышает производительность балансировки.
.
w
5
4
72
7J
ч
яе6 п
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Под ред | |||
| В.А.Щепетильникова | |||
| М., Машиностроение, 1973, с | |||
| Устройство для механических испытаний лубовых волокон | 1922 |
|
SU459A1 |
| Трубчатый паровой котел для центрального отопления | 1924 |
|
SU417A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Курбатов И.Б., Самсаев 10.А | |||
| Автоматические устройства для средств балансировки неравномерновращающихся роторов | |||
| - Механизация и автоматизация производства, 1981, № 2 (прототип). | |||
