Область техники, к которой относится изобретение
Настоящее изобретение относится к способу экономичного автоматического поддержания скорости в соответствии с родовым понятием пункта 1 формулы изобретения и системе экономичного автоматического поддержания скорости в соответствии с родовым понятием пункта 22 формулы изобретения. Настоящее изобретение относится также к компьютерной программе и компьютерному программному продукту, которые реализуют способ в соответствии с изобретением.
Уровень техники
В настоящее время автомобили, например легковые автомобили, грузовые автомобили и автобусы, обычно оборудованы системой автоматического поддержания скорости. Задача системы автоматического поддержания скорости состоит в достижении заданной постоянной скорости транспортного средства. Это реализуется либо посредством регулирования крутящего момента двигателя, чтобы избежать замедления, либо посредством применения торможения при движении на спуске, где транспортное средство ускоряется под действием собственного веса. Более общая задача системы автоматического поддержания скорости состоит в обеспечении удобного вождения и большего комфорта для водителя транспортного средства.
Водитель автомобиля с системой автоматического поддержания скорости движения обычно выбирает установленную скорость vset в качестве желаемой скорости, которую транспортное средство должно сохранять на ровных дорогах. Затем система автоматического поддержания скорости движения обеспечивает системе двигателя транспортного средства опорную скорость vref, которая используется для управления двигателем. Установленная скорость vset, вследствие этого, может рассматриваться в качестве входного сигнала для системы автоматического поддержания скорости, а опорная скорость vref в качестве выходного сигнала системы автоматического поддержания скорости движения, который используется для управления двигателем.
В современных традиционных системах автоматического поддержания скорости (CC) опорная скорость vref идентична установленной скорости vset, которая установлена пользователем системы, например водителем транспортного средства. Современные традиционные системы автоматического поддержания скорости движения вследствие этого сохраняют постоянную опорную скорость, соответствующую установленной скорости vset, которая установлена водителем. Здесь значение опорной скорости vref изменяется только тогда, когда пользователь самостоятельно регулирует ее во время поездки.
В настоящее время существуют системы автоматического поддержания скорости движения, называемые системами экономичного автоматического поддержания скорости, например Ecocruise и аналогичные системы автоматического поддержания скорости, которые пытаются оценить текущее сопротивление движению, а также обладают сведениями об истории значений сопротивления движению.
Опытный водитель, использующий транспортное средство без системы автоматического поддержания скорости, может сократить расход топлива посредством адаптации своего вождения к характеристикам лежащей впереди дороги таким образом, что можно избежать ненужного торможения и/или расходующего топливо ускорения. Более развитые варианты этих систем экономичного автоматического поддержания скорости пытаются имитировать адаптивное вождение опытного водителя на основании сведений о лежащей впереди дороге таким образом, чтобы расход топлива мог бы удерживаться как можно более низким, поскольку это очень сильно влияет на рентабельность для владельца транспортного средства, например компании, оказывающей услуги по перевозке грузов, или тому подобного.
Примером такого дальнейшего развития системы экономичного автоматического поддержания скорости является «прогнозирующая» система автоматического поддержания скорости движения (LACC), т.е. система автоматического поддержания скорости согласно стратегии, которая использует сведения об участках дороги впереди, т.е. сведения о природе дороги впереди, для определения конфигурации опорной скорости vref. Поэтому в данном случае допускается, чтобы опорная скорость vref отличалась в рамках диапазона скорости от установленной скорости vset, выбранной водителем, для осуществления движения таким образом, при котором экономится больше топлива.
Сведения об участке дороги впереди могут, например, содержать: преобладающую топологию, кривизну дороги, дорожную обстановку, дорожные работы, плотность движения и состояние дороги. Они также могут содержать ограничение скорости для участка дороги впереди и дорожный знак рядом с дорогой. Эти сведения могут быть получены, например, из: информации о местоположении, например информации GPS (глобальная система определения местоположения); информации карты и/или информации топографической карты; сводок погоды; информации, обмен которой осуществляется между разными транспортными средствами, и информации, сообщаемой по радио. Эти разные типы сведений могут использоваться различными способами. Например, сведения об ограничении скорости впереди могут быть использованы применительно к топливной экономичности посредством снижения скорости транспортного средства до того, как будет достигнута зона ограничения скорости. Аналогичным образом сведения о дорожном знаке, отражающем информацию, например об участке с круговым движением или перекрестке впереди, также могут быть использованы применительно к топливной экономичности посредством торможения до того, как будет достигнут участок с круговым движением или перекресток. То, что система автоматического поддержания скорости основана на информации о местоположении в сочетании с информацией топографической карты, позволяет избежать неправильных решений из-за неправильного восприятия водителем уклона дороги. Например, водитель может неправильно воспринять окрестности, как указывающие на движение на спуске впереди транспортного средства, тогда как данные топографической карты могут непосредственно и правильно указывать на то, что фактически здесь имеет место движение на подъем. При достижении транспортным средством лежащего впереди участка дороги хороший водитель поймет, что на основании информации о местоположении в сочетании с данными карты было достигнуто правильное решение. Тем самым повышается его/ее признание функции.
Система экономичного автоматического поддержания скорости может, например, прогнозировать скорость транспортного средства вдоль горизонтального участка любой приемлемой длины, например, около 1-2 км. Будущая скорость транспортного средства вдоль горизонтального участка прогнозируется различными способами, как например, при движении с помощью традиционной системы автоматического поддержания скорости с опорной скоростью vref, которая точно такая же, как установленная скорость vset, или изменяя опорную скорость vref относительно установленной скорости vset.
Прогнозирующая система автоматического поддержания скорости (LACC) позволяет, например, реализовать увеличение опорной скорости vref перед крутым подъемом до уровня выше установленной скорости vset, поскольку транспортное средство, вероятно, потеряет скорость на крутом подъеме из-за высокого веса автопоезда по отношению к характеристике двигателя. Аналогичным образом LACC позволяет реализовать сброс опорной скорости vref до уровня ниже установленной скорости vset перед крутым спуском, поскольку при таком движении на спуске транспортное средство, вероятно, будет ускоряться под действием своего высокого веса автопоезда. Концепция здесь состоит в том, что с точки зрения топливной экономичности лучше воспользоваться преимуществом ускорения транспортного средства под действием его собственного веса при движении на спуске, чем исходно ускоряться перед спуском, а затем тормозить на спуске. Таким образом, LACC может сократить расход топлива, не оказывая влияния на время поездки.
Также существуют системы автоматического подержания скорости, которые используют текущее сопротивление движению в качестве базы для того, чтобы решить, каким образом должна измениться скорость транспортного средства. В таких системах автоматического поддержания скорости может быть разрешено отклонение опорной скорости vref от установленной скорости vset на основании по меньшей мере одной характеристики сопротивления движению, например величины и/или форме, с течением времени.
В данном техническом описании изобретение приводится в качестве примера при использовании в или в сочетании с системой автоматического поддержания скорости, например прогнозирующей системой автоматического поддержания скорости (LACC), т.е. системой автоматического поддержания скорости со стратегией, которая может использовать сведения о природе дороги впереди для управления опорной скоростью vref. Тем не менее, изобретение может быть реализовано по существу в любой системе автоматического поддержания скорости, в которой разрешено, чтобы опорная скорость vref отличалась от установленной скорости vset, или в сочетании с такой системой.
Как упомянуто выше, LACC обладает сведениями о местоположении транспортного средства и локальной топографии, однако прочие параметры также могут оказывать влияние на опорную скорость vref, которую водитель желает, чтобы система использовала в качестве выходного сигнала. Такие параметры могут содержать, например, других участников дорожного движения и то, каким образом они ведут себя в дорожном движении. Другим таким параметром может быть превалирующая ситуация дорожного движения, например дорожные работы.
Раскрытие изобретения
Поскольку не все LACC обладают сведениями о и/или могут учитывать все параметры, которые оказывали бы влияние на собственный выбор водителя опорной скорости vref, то выбор системы отличается от опорной скорости vref, которую предпочитает водитель. Это влечет за собой проблемы, которые состоят в том, что применительно к транспортному средству очень важно, чтобы оно вело себя таким образом, который воспринимается водителем как естественный и интуитивный, чтобы он/она были бы готовы использовать функцию LACC.
Более того, транспортное средство, которое ведет себя таким образом, который его водитель находит странным, также будет беспокоить других участников дорожного движения в соседних транспортных средствах.
Задача настоящего изобретения состоит в создании системы экономичного автоматического поддержания скорости, воспринимаемой пользователем как находящаяся под его управлением и которая при этом обеспечивает вождение транспортного средства таким образом, при котором экономится топливо.
Данная задача решается вышеупомянутым способом экономичного автоматического поддержания скорости в соответствии с отличительной частью пункта 1 формулы изобретения. Она также решается вышеупомянутой системой экономичного автоматического поддержания скорости движения в соответствии с отличительной частью пункта 22 формулы изобретения и вышеупомянутой компьютерной программой и компьютерным программным продуктом.
В соответствии с настоящим изобретением регулирование по меньшей мере опорной скорости vref разрешено, если опорная скорость vref для системы экономичного автоматического поддержания скорости отличается от установленной скорости vset, т.е. если vref≠vset. В соответствии с настоящим изобретением данное регулирование основано по меньшей мере частично на вводе со стороны пользователя системы экономичного автоматического поддержания скорости.
Настоящее изобретение позволяет пользователю системы экономичного автоматического поддержания скорости изменять опорную скорость vref таким образом, что затем она отличается от опорной скорости vref, которую система автоматического поддержания скорости рассматривает в качестве оптимальной в данный момент. Это предоставляет пользователю, который может быть водителем транспортного средства, возможность почувствовать, что он/она по меньшей мере в некоторой степени управляет системой экономичного автоматического поддержания скорости и, следовательно, скоростью транспортного средства, что многие пользователи найдут весьма позитивным ощущением. Данное позитивное ощущение, соответствующее до некоторой степени управлению скоростью транспортного средства, когда управление ею осуществляется системой экономичного автоматического поддержания скорости, затем может повысить готовность водителя к использованию системы экономичного автоматического поддержания скорости и/или может сократить риск того, что он/она ее выключит. В результате управляемое пользователем ограничение системы экономичного автоматического поддержания скорости поддерживает желание водителя в том, чтобы иметь возможность оказания влияния на скорость движения транспортного средства. В итоге получается, что при увеличении использования системы экономичного автоматического поддержания скорости в результате большего признания водителем ее функции сокращается расход топлива.
В соответствии с различными вариантами осуществления изобретения опорная скорость vref устанавливается на основании ввода со стороны водителя разных значений, соответствующих разным ситуациям вождения.
Например, в соответствии с вариантом осуществления ввод приводит к тому, что опорная скорость vref устанавливается равной установленной скорости vset таким образом, что vref=vset. Это является предпочтительным, когда водитель намерен отменить текущее решение системы экономичного автоматического поддержания скорости в отношении величины опорной скорости vref и возвратиться к установленной скорости vset. Это простое средство позволяет водителю не иметь никаких трудностей в понимании того, что он/она может взаимодействовать с системой автоматического поддержания скорости движения прерывания роста или снижения опорной скорости vref относительно установленной скорости vset.
В соответствии с другим вариантом осуществления ввод приводит к тому, что опорная скорость vref устанавливается равной текущей скорости vpres таким образом, что vref=vpres. Это является предпочтительным, поскольку ввод пользователя в данном случае может рассматриваться как указывающий на то, что текущая скорость vpres, с которой транспортное средство, например, движется на подъеме, является приемлемой для него/нее. Данный вариант осуществления также обеспечивает потенциал для дальнейшей экономии топлива.
Все варианты осуществления изобретения приводят к повышенному признанию водителем функции системы автоматического поддержания скорости, что со временем увеличит ее использование, приводящее к более низкому суммарному расходу топлива.
Краткое описание чертежей
Изобретение более подробно объясняется ниже со ссылкой на сопровождающие чертежи, на которых одинаковые ссылочные позиции используются для аналогичных элементов и в которых:
фиг. 1 изображает пример скоростей в ситуации вождения,
фиг. 2 изображает пример скоростей в ситуации вождения,
фиг. 3 изображает пример скоростей в ситуации вождения,
фиг. 4 изображает пример скоростей в ситуации вождения,
фиг. 5 изображает пример скоростей в ситуации вождения,
фиг. 6 изображает пример устройства ввода,
фиг. 7 является блок-схемой способа в соответствии с изобретением,
фиг. 8 изображает блок управления, который работает в соответствии с изобретением.
Осуществление изобретения
Настоящее изобретение позволяет пользователю системы экономичного автоматического поддержания скорости оказывать влияние на опорную скорость vref таким образом, что она отличается от той, которую система автоматического поддержания скорости рассматривает в качестве оптимальной в данный момент.
Другими словами, настоящее изобретение разрешает регулирование по меньшей мере опорной скорости vref, когда опорная скорость vref для экономичной системы автоматического поддержания скорости отличается от установленной скорости vset. Данное регулирование основано по меньшей мере частично на вводе со стороны пользователя системы экономичного автоматического поддержания скорости.
Регулирование в соответствии с настоящим изобретением ограничивает управление системой экономичного автоматического поддержания скорости в отношении опорной скорости vref. Регулирование может привести к тому, что система экономичного автоматического поддержания скорости будет использовать опорную скорость vref, которую она рассматривает как субоптимизированную.
Тем не менее, регулирование означает, что пользователь может по меньшей мере частично оказывать влияние на опорную скорость vref, что обеспечивает водителю ощущение управления системой экономичного автоматического поддержания скорости. Это само по себе может повысить готовность водителя к использованию системы экономичного автоматического поддержания скорости.
Настоящее изобретение, таким образом, приводит к управляемому пользователем ограничению возможности выбора системой экономичного автоматического поддержания скорости величины опорной скорости vref. Таким образом поддерживается готовность пользователя иметь возможность оказания влияния на опорную скорость vref.
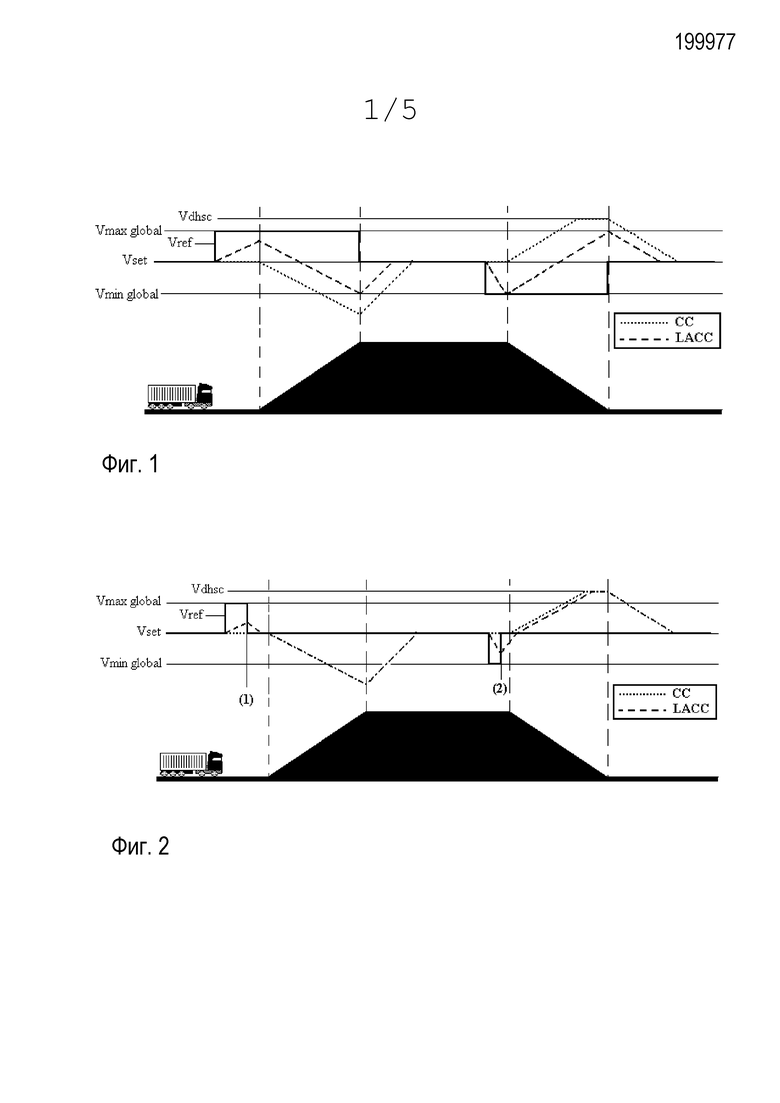
На фиг. 1 изображен пример того, какова была бы скорость применительно к транспортному средству с традиционной системой автоматического поддержания скорости (CC: пунктирная линия) на участке дороги, где за подъемом следует пологий участок и спуск. При традиционной системе автоматического поддержания скорости опорная скорость vref устанавливается равной установленной скорости vset все время. Система экономичного автоматического поддержания скорости пытается там, где это возможно, удерживать скорость транспортного средства в пределах диапазона между наименьшей, предельно допустимой скоростью vmin glob и наибольшей предельно допустимой скоростью vmax glob. Тем не менее, эти наименьшая и наибольшая допустимые скорости главным образом предназначены в качестве ограничений для скоростей, которые допустимы при движении с уклоном, гарантируя, что скорость транспортного средства подвергается оптимальному изменению по отношению к приоритетности времени вождения и/или расхода топлива. Наименьшая допустимая скорость vmin glob вследствие этого указывает на то, насколько высока может быть скорость транспортного средства перед спуском, а наибольшая допустимая скорость vmax glob указывает на то, насколько высока она может быть перед подъемом.
Схема показывает, что скорость транспортного средства с традиционной системой автоматического поддержания скорости (CC) находится ниже наименьшей предельно допустимой скорости vmin glob на вершине подъема и выше наибольшей предельно допустимой скорости vmax glob в конце спуска. Это само по себе не так серьезно, но с точки зрения экономии топлива серьезно, поскольку ускорение транспортного средства фактически тормозится посредством тормоза постоянной скорости при достижении скорости vdhsc системы управления скоростью на спуске (DHSC). Тормоз постоянной скорости регулирует скорость, например, тяжелых транспортных средств на спусках посредством использования вспомогательных тормозов, например замедлителя и тормоза замедлителя в выпускной системе двигателя, четырехступенчатого электромагнитного тормоза (Telma) и/или тормоза замедлителя в выпускной системе двигателя Volvo (vEB). Вследствие этого традиционная система автоматического поддержания скорости не является оптимальной применительно к управлению скоростью на волнистых/холмистых дорогах, вызывающих движение на спуске и/или на подъеме.
На фиг. 1 также проиллюстрирован пример того, какова будет скорость транспортного средства с современной прогнозирующей системой автоматического поддержания скорости (LACC: штриховая линия). В LACC опорная скорость vref (жирная непрерывная линия) основана, среди прочего, на установленной скорости vset и на сведениях топографической информации, например информации о подъеме, пологом участке и спуске по фиг. 1. Схема явным образом показывает, что LACC не выходит ниже наименьшей предельно допустимой скорости vmin glob на вершине подъема, поскольку опорной скорости vref разрешено превышать установленную скорость vset до и во время движения на подъеме. Также LACC не превышает наибольшую предельно допустимую скорость vmax glob, поскольку опорной скорости vref разрешено быть ниже установленной скорости vset до и во время движения на спуске. Таким образом LACC разрешает опорной скорости vref отличаться от установленной скорости vset. Фиг. 1 показывает, что LACC считает, что опорная скорость vref должна быть оптимизирована как для функции стоимости LACC. Такая функция стоимости указывает различные параметры, которые должны учитываться при принятии решения. Параметры взвешиваются и затем решения принимаются на основании взвешенных параметров таким образом, что достигается наименьшая стоимость для функции, при условии выполнения конкретных требований, например ограничений скорости.
При использовании LACC энергия не гасится посредством тормоза постоянной скорости, что является оптимальным с точки зрения экономии топлива.
В соответствии с вариантом осуществления настоящего изобретения, когда опорная скорость vref применительно к системе экономичного автоматического поддержания скорости отличается от установленной скорости vset, то пользователь может регулировать по меньшей мере опорную скорость vref таким образом, что она устанавливается равной установленной скорости vset, т.е. так что vref=vset.
Данный вариант осуществления иллюстрируется на фиг. 2, на которой пользователь оказывает влияние на опорную скорость vref применительно к LACC в первый момент 1 времени. Таким образом, осуществляется регулирование опорной скорости vref (непрерывная толстая линия) так, чтобы она стала равной установленной скорости vset, т.е. vref=vset, так что прерывается рост опорной скорости vref до более высокого значения, чем установленная скорость vset ближе к данному первому моменту времени. Таким образом, здесь пользователю разрешено оказать влияние на выбор LACC опорной скорости vref.
Во второй момент 2 времени пользователь вновь оказывает влияние на опорную скорость vref применительно к LACC посредством регулирования ее таким образом, что она устанавливается равной установленной скорости vset, т.е. vref=vset, что приводит к тому, что в данный второй момент времени прерывается снижение опорной скорости vref до более низкого значения, чем установленная скорость vset.
Штриховая линия на фиг. 2 представляет собой скорость транспортного средства, когда реализуется использование LACC с настоящим изобретением. Схема показывает, что данная скорость становится соответственно равно той, что получается в результате работы традиционной системы автоматического поддержания скорости (пунктирная линия) при движении на подъеме и вплоть до непосредственно перед движением на спуске. При движении на спуске скорость транспортного средства становится отчасти ниже той, что достигается при традиционной системе автоматического поддержания скорости, но в конце движения на спуске, как в случае традиционной системы автоматического поддержания скорости, часть ускорения гасится тормозом постоянной скорости.
Анализ фиг. 2 показывает, что в некоторых случаях конкретный определенный объем энергии должен гаситься при использовании данного варианта осуществления изобретения, так что данная система автоматического поддержания скорости не оптимальна с точки зрения экономии топлива. Тем не менее, разрешая пользователю оказывать влияние на опорную скорость vref, приводит к повышению признания пользователем функции LACC. Таким образом, возможность оказания влияния на систему автоматического поддержания скорости может привести к тому, что большее число водителей будет использовать LACC более часто и будет противодействовать недостаточности ее использования или выключению ее из-за того, что они не ощущают себя комфортно при использовании ее функции. Общим результатом может быть сокращение расхода топлива из-за возросшего использования LACC.
В соответствии с вариантом осуществления настоящего изобретения установленная скорость vset устанавливается в отрегулированное с повышением значение vset=vset, old+vadj до того, как имело место регулирование опорной скорости vref. vset, old здесь представляет собой значение установленной скорости до того, как оно было отрегулировано с повышением. Это означает, что опорная скорость vref устанавливается на основании ввода пользователя, в отрегулированное с повышением значение установленной скорости таким образом, что vref=vset=vset, old+vadj.
В соответствии с другим вариантом осуществления настоящего изобретения установленная скорость vset устанавливается в отрегулированное с понижением значение vset=vset, old-vadj до того, как имело место регулирование опорной скорости vref. vset, old здесь представляет собой значение установленной скорости до того, как оно было отрегулировано с понижением. Это означает, что опорная скорость vref устанавливается на основании ввода со стороны пользователя в отрегулированное с понижением значение установленной скорости таким образом, что vref=vset=vset, old-vadj.
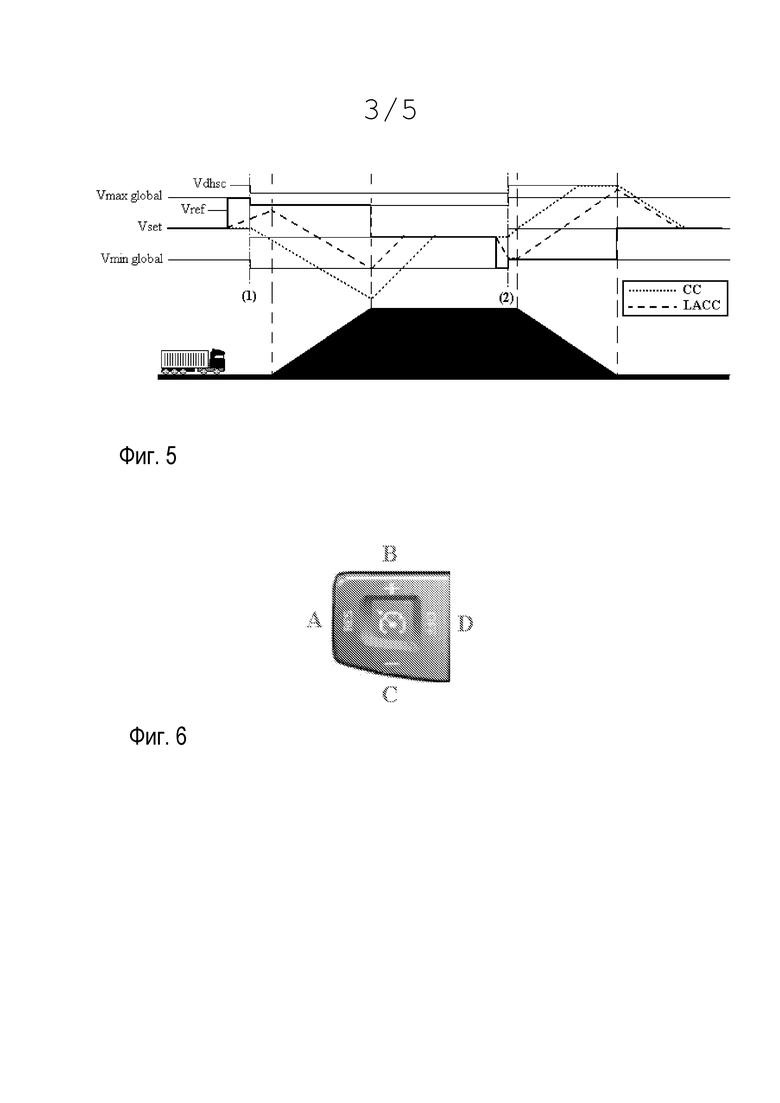
Установка опорной скорости vref в отрегулированное значение установленной скорости позволяет посредством регулирования добиться относительно большого изменения опорной скорости vref, которое может расширить ощущение пользователем того, что он может оказывать влияние на опорную скорость vref. Это иллюстрируется на фиг. 3.
В примере на фиг. 3 пользователь оказывает влияние на опорную скорость vref применительно к LACC в первый момент 1 времени. Здесь установленная скорость устанавливается в отрегулированное с понижением значение vset=vset, old-vadj. Затем осуществляется регулирование опорной скорости vref (непрерывная толстая линия) таким образом, чтобы она стала равной данному отрегулированному с понижением значению установленной скорости vset так, что vref=vset=vset, old-vadj. Здесь следует отметить, что соответствующая максимальная, предельно допустимая скорость vmax glob и минимальная, предельно допустимая скорость vmin glob и скорость vdhsc тормоза постоянной скорости изменяются посредством этапов, аналогичных для установленной скорости vset в данном примере. Тем не менее, в соответствии с другими вариантами осуществления, существует возможность применительно к одной или более из соответствующих скоростей: максимальной, предельно допустимой скорости vmax glob и минимальной, предельно допустимой скорости vmin glob и скорости vdhsc тормоза постоянной скорости, чтобы они изменялись посредством этапов, которые не соответствуют этапам изменения установленной скорости vset.
Таким образом, здесь выполняется регулирование установленной скорости до отрегулированного с понижением значения vset=vset, old-vadj, и рост опорной скорости vref до значения выше установленной скорости vset прерывается ближе к данному первому моменту времени. Таким образом, здесь пользователю разрешено оказывать влияние на выбор LACC как опорной скорости vref, так и установленной скорости vset.
Во второй момент 2 времени пользователь вновь оказывает влияние на опорную скорость vref применительно к LACC. Здесь установленная скорость устанавливается в отрегулированное с повышением значение vset=vset, old+vadj. Затем осуществляется регулирование опорной скорости vref (непрерывная толстая линия) таким образом, что она устанавливается равной данному, отрегулированному с повышением значению установленной скорости, т.е. vref=vset=vset, old+vadj.
Таким образом, здесь выполняется регулирование установленной скорости до отрегулированного с повышением значения vset=vset, old+vadj, и рост опорной скорости vref до значения выше установленной скорости vset прерывается ближе к данному второму моменту времени. Таким образом, здесь пользователю разрешено оказывать влияние на выбор LACC как опорной скорости vref, так и установленной скорости vset.
Штриховая линия на фиг. 3 представляет собой скорость транспортного средства при использовании LACC с реализованным настоящим изобретением. Схема показывает, что не требуется гасить ускорение посредством тормоза постоянной скорости в конце движения на спуске, что является преимуществом с точки зрения экономии топлива.
В соответствии с вариантом осуществления настоящего изобретения опорная скорость vset устанавливается равной текущей скорости vpres транспортного средства таким образом, что vref=vpres, когда пользователь оказывает влияние на опорную скорость vref. Данный вариант осуществления иллюстрируется на фиг. 4, на которой в первый момент 1 времени пользователю разрешено прервать рост опорной скорости vref выше уровня установленной скорости vset. Ввод пользователя устанавливает опорную скорость vref равной скорости, с которой транспортное средство перемещается в данный первый момент 1 времени. Результат в примере, изображенном на фиг. 4, состоит в том, что скорость транспортного средства (штриховая линия) достигает уровня даже ниже наименьшей допустимой скорости vmin glob на вершине подъема.
Во второй момент 2 времени, непосредственно перед началом движения на спуске, пользователю также разрешено прервать снижение опорной скорости vref ниже уровня установленной скорости vset. Ввод пользователя устанавливает опорную скорость vref равной скорости, с которой транспортное средство перемещается во второй момент 2 времени. Результат в примере состоит в том, что скорость достигает уровня даже выше наибольшей допустимой скорости vmax glob в конце движения на спуске. Здесь следует отметить, что не имеет место гашение энергии в конце движения на спуске, поскольку не достигается скорости vdhsc тормоза постоянной скорости. Таким образом, данный вариант осуществления является не только экономичным с точки зрения энергии, но также обеспечивает пользователю ощущение того, что он/она управляет функцией системы экономичного автоматического поддержания скорости, поскольку обеспечена возможность влияния на выбор опорной скорости vref, не активируя тормоз постоянной скорости.
В соответствии с вариантом осуществления настоящего изобретения опорная скорость vref может регулироваться, когда текущей скоростью vpres транспортного средства является временно наименьшая скорость vmin temp. Таким образом, здесь опорная скорость vref устанавливается равной временному минимуму скорости vref=vmin temp. Временно наименьшая скорость vmin temp здесь представляет собой скорость, которую транспортное средство сохраняет в течение короткого периода, например перед движением на спуске. Величина временно наименьшей скорости vmin temp зависит от ряда параметров, например требуемого крутящего момента двигателя и сопротивления движению (содержащего в частности такие параметры, как топография и вес транспортного средства).
В соответствии с вариантом осуществления настоящего изобретения опорная скорость vref может быть отрегулирована, когда текущей скоростью vpres транспортного средства является временная наибольшая скорость vmax temp, и опорная скорость vref устанавливается равной временному максимуму скорости vref=vmax temp. Временно наибольшая скорость vmax temp здесь представляет собой скорость, которую транспортное средство сохраняет в течение короткого периода, например перед движением на подъеме. Величина временно наибольшей скорости vmax temp зависит от ряда параметров, например требуемого крутящего момента двигателя и сопротивления движению.
В соответствии с вариантом осуществления настоящего изобретения регулирование опорной скорости vref осуществляется на основании ввода отрегулированного с повышением значения vref,old+vadj. В соответствии с вариантом осуществления настоящего изобретения осуществляется регулирование опорной скорости vref до отрегулированного с понижением значения vref,old-vadj. В этих вариантах осуществления vref, old представляет собой значение, которому соответствовала опорная скорость до регулирования. Посредством использования этих вариантов осуществления водитель может сразу отрегулировать опорную скорость vref по отношению к величине текущей опорной скорости vref, old, т.е. по отношению к величине опорной скорости до регулирования.
В соответствии с вариантом осуществления после первого ввода отрегулированное с повышением значение vset, old+vadj используется в качестве нового значения для установленной скорости, так что vset=vset, old+vadj. В соответствии с вариантом осуществления после первого ввода отрегулированное с понижением значение vset, old-vadj используется в качестве нового значения для установленной скорости, так что vset=vset, old-vadj.
Как описано выше, в некоторых вариантах осуществления настоящего изобретения установленная скорость vset устанавливается в отрегулированное с повышением значение vset, old+vadj, когда регулирование опорной скорости vref осуществляется на основании ввода со стороны пользователя. В некоторых вариантах осуществления настоящего изобретения установленная скорость vset также устанавливается в отрегулированное с понижением значение vset, old-vadj, когда регулирование опорной скорости vref осуществляется на основании ввода пользователя. Эти отрегулированные с повышением или с понижением значения также могут быть использованы в качестве новых значений для установленной скорости, так что vset=vset, old+vadj или vset=vset, old-vadj.
Фиг. 5 изображает вариант осуществления изобретения, в котором пользователь посредством ввода в первый момент 1 времени устанавливает опорную скорость в отрегулированное с понижением значение vref=vref,old-vadj и устанавливает установленную скорость в отрегулированное с понижением значение vset=vset, old-vadj. Ввод во второй момент 2 времени устанавливает опорную скорость в отрегулированное с повышением значение vref=vref,old+vadj и устанавливает установленную скорость в отрегулированное с повышением значение vset=vset, old+vadj. Здесь следует отметить, что соответствующая максимальная, предельно допустимая скорость vmax glob и минимальная, предельно допустимая скорость vmin glob и скорость vdhsc тормоза постоянной скорости изменяются посредством этапов, аналогичных для установленной скорости vset.
Результат в примере, изображенном на фиг. 5, состоит в том, что скорость транспортного средства (штриховая линия) касается наименьшей допустимой скорости vmin glob на вершине подъема и достигает чуть большего значения, чем наибольшая, предельно допустимая скорость vmax glob в конце движения на спуске, не прибегая к гашению энергии в конце движения на спуске, поскольку скорость vdhsc тормоза постоянной скорости не достигается. Результат заключается в создании системы автоматического поддержания скорости, которая экономична с точки зрения энергии, и в тоже время у пользователя присутствует ощущение управления ее функцией, обусловленное тем, что он/она может оказывать влияние на выбор опорной скорости vref и установленной скорости vset, не активируя тормоз постоянной скорости.
В соответствии с вариантом осуществления настоящего изобретения регулирование установленной скорости vset также осуществляется, когда осуществляется регулирование опорной скорости vref до временно наибольшей скорости vmax temp или временно наименьшей скорости vmin temp, в зависимости от того, осуществляется ли ввод пользователя посредством конкретного типа устройства ввода, например рукоятки рулевого колеса, как изображено на фиг. 6 и более подробно описывается ниже. Когда пользователь осуществляет вводы посредством некоторого другого типа устройства ввода, например педали акселератора, то установленная скорость vset не меняется в момент ввода.
В соответствии с вариантом осуществления изобретения выполненное регулирование применяется на расстоянии S, которое начинается, т.е. начальная точка которого соответствует моменту, когда пользователь осуществляет ввод для оказания влияния на опорную скорость vref, и завершается, когда выполняется условие деактивации. Другими словами, регулирование применяется на конкретном расстоянии S, после которого система экономичного автоматического поддержания скорости возвращается к своей нормальной функции.
Такое условие деактивации, в ответ на которое расстояние S считается достигшим своего окончания, может быть связано с одним или более событиями из числа событий, связанных с: переключением передачи, торможением, приведением в действие сцепления, изменением требуемого крутящего момента двигателя и новым вводом со стороны пользователя. Таким образом, здесь соответствующее расстояние определяется на основании одного или более событий, на которые может оказывать влияние водитель транспортного средства. Условие деактивации также может быть связано с прохождением предварительно определенной части упомянутого расстояния, например транспортное средство, перемещающееся на любое приемлемое, предварительно определенное расстояние. Расстояние S также может быть рассмотрено как заканчивающееся в конечной точке текущего движения на подъеме или на спуске, которая находится близко от транспортного средства, когда выполняется регулирование.
Регулирование в соответствии с изобретением может быть преимущественно применено во время некоторых конкретных ситуаций вождения, например при движении на подъеме или на спуске, при обгоне, при ускорении или при вождении в тоннеле. Расстояние S, на которое применяется регулирование, предпочтительно выбирается таким образом, чтобы регулирование сохранялось во время этих конкретных ситуаций вождения, тем самым предоставляя водителю транспортного средства интуитивно корректное восприятие вождения, что является большим преимуществом.
В соответствии с вариантом осуществления настоящего изобретения ввод пользователя может быть выполнен посредством одного или более устройств ввода, например одного или более из устройств: кнопки, рычага, рукоятки, педали, сенсорного экрана, устройства голосового ввода и выбора меню, например, на экране визуального отображения. По существу, все типы устройств ввода могут быть использованы водителем для ввода информации в систему экономичного автоматического поддержания скорости в соответствии с изобретением. В соответствии с вариантом осуществления также предполагаются вводы через различные типы устройств ввода. Примеры нажатия кнопки проиллюстрированы ниже в связи с примерами, относящимися к фиг. 6.
Вводы посредством педали акселератора могут в разных вариантах осуществления иметь разные значения в зависимости от того, каким образом и/или когда нажимается педаль. Например, очень слабое нажатие на педаль акселератора может быть интерпретировано системой в качестве установки опорной скорости vref, равной текущей скорости vpres транспортного средства так, что vref=vpres. Если, наоборот, водитель, например, отпускает педаль акселератора после ускорения в течение некоторого периода, то это может быть интерпретировано системой в качестве установки опорной скорости vref, равной текущей скорости vpres транспортного средства, которая является временно наименьшей скоростью vmin temp так, что vref=vmin.
В соответствии с другим вариантом осуществления положение педали имеет более высокий приоритет, чем система автоматического поддержания скорости, до тех пор, пока педаль нажата, что означает, что водитель может использовать педаль для управления скоростью транспортного средства в то время, пока педаль нажата. В данном контексте положение педали газа вследствие этого игнорируется системой, что касается установленной скорости vset и опорной скорости vref, на которые, вследствие этого, педаль не оказывает влияния, когда она остается нажатой. Когда педаль отпускается, то установленная скорость vset и опорная скорость vref вновь могут быть изменены системой по меньшей мере частично на основании вводов со стороны водителя.
На фиг. 6 показан неограничивающий пример устройства ввода в виде кнопки, которое может быть использовано в соответствии с изобретением. Данная кнопка может быть доступна в кабине водителя. Она может быть расположена, например, на рулевом колесе и таким образом быть легкодоступна водителю.
Некоторые возможные применения различных, описанных выше вариантов осуществления изобретения описаны ниже в отношении кнопки по фиг. 6. Следует отметить, что каждое из применений, проиллюстрированных ниже, содержит по меньшей мере один ввод, который приводит к использованию варианта осуществления настоящего изобретения.
Четыре разных ввода могут быть выполнены посредством кнопки по фиг. 6, на которой ввод A помечен как «Res», ввод B «+», ввод C «-» и ввод D «выкл». Эти описываемые применения представляют собой неограничивающие примеры использования изобретения и описаны для лучшего понимания изобретения. Разумеется, аналогичные применения могут быть реализованы при помощи любого другого описанного выше устройства ввода помимо кнопки по фиг. 6. Эти устройства ввода могут быть любой подходящей конфигурации, которая обеспечивает ввод в соответствии с изобретением.
В первом примере установленная скорость vset исходно равна 80 км/ч, опорная скорость vref - 74 км/ч, а текущая скорость vpres транспортного средства - 76 км/ч. Следовательно, исходной ситуацией является
- vset=80 км/ч
- vref=74 км/ч и
- vpres=76 км/ч
В соответствии с описанным выше вариантом осуществления изобретения, когда регулирование на основании ввода приводит к установке опорной скорости vref, равной установленной скорости vset, то следующие соответствующие вводы посредством кнопки по фиг. 6 могут привести к следующим результатам в данном первом примере:
В соответствии с описанным выше вариантом осуществления изобретения, когда регулирование на основании ввода приводит к установке опорной скорости vref в отрегулированное с повышением значение установленной скорости vset=vset, old+vadj, то следующие соответствующие вводы посредством кнопки по фиг. 6 могут привести к следующим результатам в данном первом примере:
vref=vset=81 км/ч (прерывается снижение)
В соответствии с описанным выше вариантом осуществления изобретения, когда регулирование на основании ввода приводит к установке опорной скорости vref в отрегулированное с повышением значение vref, old+vadj, то следующие соответствующие вводы посредством кнопки на фиг. 6 могут привести к следующим результатам в данном первом примере:
vref=vref, old+1=75 км/ч
В соответствии с описанным выше вариантом осуществления изобретения, когда регулирование на основании ввода приводит к установке опорной скорости vref, равной текущей скорости vpres транспортного средства, то следующие соответствующие вводы посредством кнопки на фиг. 6 могут привести к следующим результатам в данном первом примере:
Во втором примере установленная скорость vset исходно равна 80 км/ч, опорная скорость vref - 83 км/ч, а текущая скорость vpres транспортного средства - 82 км/ч. Следовательно, исходной ситуацией является
- vset=80 км/ч
- vref=83 км/ч и
- vpres=82 км/ч
В соответствии с описанным выше вариантом осуществления изобретения, когда регулирование на основании ввода приводит к установке опорной скорости vref, равной установленной скорости vset, то следующие соответствующие вводы посредством кнопки на фиг. 6 могут привести к следующим результатам в данном втором примере:
В соответствии с описанным выше вариантом осуществления изобретения, когда регулирование на основании ввода приводит к установке опорной скорости vref в отрегулированное с понижением значение установленной скорости vset=vset, old-vadj, то следующие соответствующие вводы посредством кнопки по фиг. 6 могут привести к следующим результатам в данном втором примере:
vref=vset=79 км/ч (прерывается рост)
В соответствии с описанным выше вариантом осуществления изобретения, когда регулирование на основании ввода приводит к установке опорной скорости vref в отрегулированное с понижением значение vref, old-vadj, то следующие соответствующие вводы посредством кнопки по фиг. 6 могут привести к следующим результатам в данном втором примере:
vref=vref, old-1=82 км/ч
В соответствии с описанным выше вариантом осуществления изобретения, когда регулирование на основании ввода приводит к установке опорной скорости vref, равной текущей скорости vpres транспортного средства, то следующие соответствующие вводы посредством кнопки по фиг. 6 могут привести к следующим результатам в данном втором примере:
Специалисту в данной области техники будет понятно, что различные указанные выше функции, относящиеся к вводам A, B, C, D в различных вариантах осуществления, могут быть объединены. Таким образом, кнопка может быть реализована, например, так, что ее функция применительно к нажатию A берется из одного из вышеприведенных примеров, а ее функция применительно к нажатию B - из другого примера. Единственное требование к таким возможным сочетаниям состоит в том, что функции примеров не должны противоречить друг другу.
В приведенных выше примерах величина соответствующих регулирований vadj установленной скорости vset с повышением и с понижением проиллюстрирована значением один (1), которое является величиной регулирования в соответствии с вариантом осуществления изобретения, т.е. vadj=1, однако их величина в соответствии с изобретением также может предполагать другие значения. Соответствующие регулирования с повышением и с понижением имеют в соответствии с изобретением значение, связанное с величиной установленной скорости, например они могут иметь значение, соответствующее проценту x установленной скорости vset так, что vadj=vset×x%. В соответствии с вариантом осуществления изобретения пользователь может самостоятельно выбрать величину соответствующих регулирований vadj с повышением и с понижением.
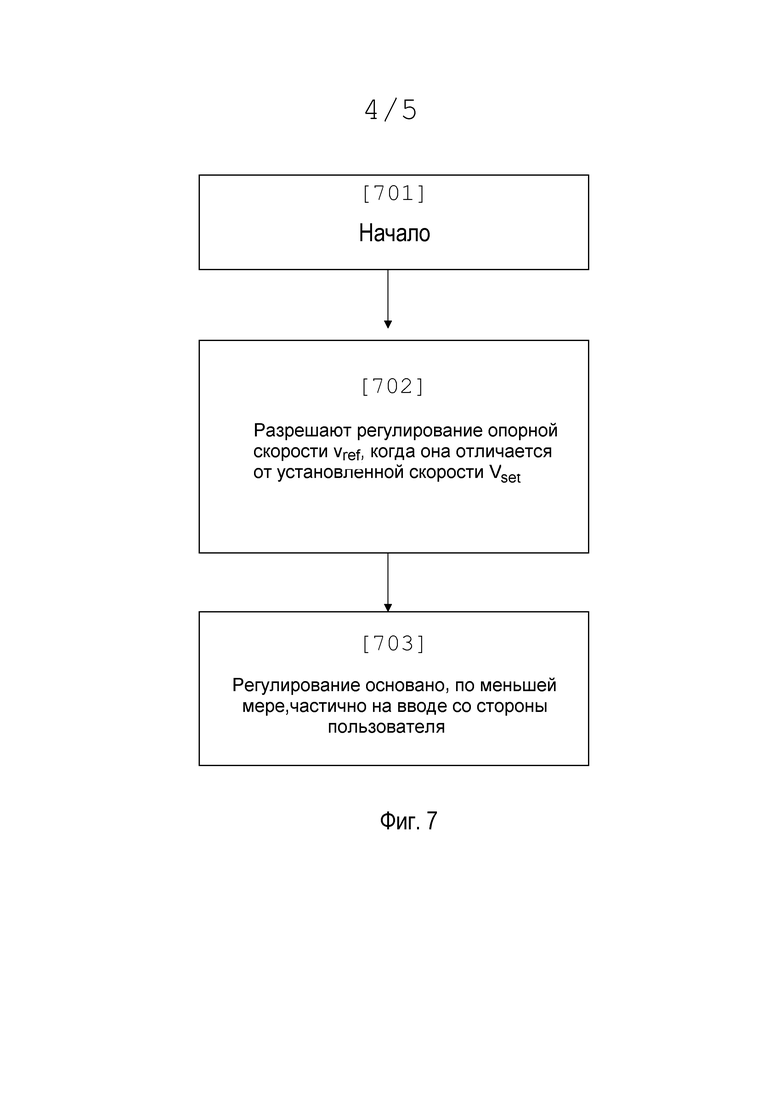
Фиг. 7 является блок-схемой способа в соответствии с настоящим изобретением. Способ начинается на первом этапе [701]. В качестве второго этапа [702] разрешают регулирование по меньшей мере опорной скорости vref, когда она отличается от установленной скорости vset. В качестве третьего этапа [703] осуществляется регулирование по меньшей мере частично на основании ввода со стороны пользователя.
Настоящее изобретение также относится к системе экономичного автоматического поддержания скорости, выполненной с возможностью требования от системы двигателя опорной скорости vref, которая может отличаться от выбранной установленной скорости vset. Система экономичного автоматического поддержания скорости в соответствии с изобретением содержит блок регулирования, выполненный с возможностью разрешения регулирования по меньшей мере опорной скорости vref, когда она отличается от установленной скорости vset, т.е. когда vref≠vset. Блок регулирования также выполнен с возможностью регулирования по меньшей мере частично на основании ввода со стороны пользователя системы экономичного автоматического поддержания скорости.
Специалисту в данной области техники будет понятно, что способ экономичного автоматического поддержания движения в соответствии с настоящим изобретением также может быть реализован в компьютерной программе, которая при исполнении компьютером побуждает компьютер применять способ. Компьютерная программа обычно имеет вид компьютерного программного продукта 803 по фиг. 8, сохраненного на носителе данных, и содержится на машиночитаемом носителе информации такого продукта, который выполнен в виде надлежащего запоминающего устройства, например ROM (постоянного запоминающего устройства), PROM (программируемого постоянного запоминающего устройства), EPROM (стираемого PROM), флэш-памяти, EEPROM (электрически стираемого PROM), устройства жесткого диска и т.д.
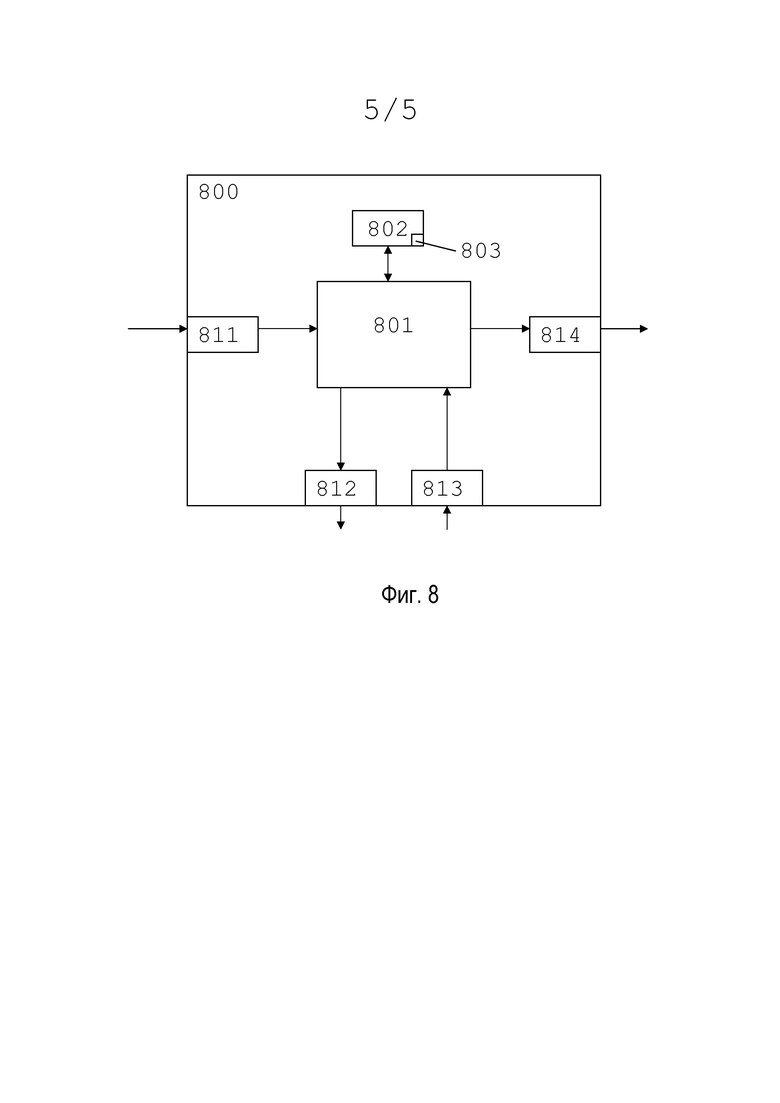
Фиг. 8 схематично изображает блок 800 управления, содержащий блок 801 вычисления, который может быть выполнен в виде по существу любого приемлемого типа процессора или микрокомпьютера, например, схемы цифровой обработки сигнала (цифровой сигнальный процессор, DSP), или схемы с конкретной заданной функцией (специализированная интегральная схема, ASIC). Блок 801 вычисления соединен с блоком 802 памяти, который размещается в блоке 800 управления и который предоставляет блоку вычисления, например, хранящийся код программы и/или хранящиеся данные, которые требуются блоку вычисления, чтобы позволить ему выполнить вычисления. Блок вычисления также выполнен с возможностью сохранения частичных или итоговых результатов вычислений в блоке памяти.
Блок 800 управления дополнительно предусмотрен с соответствующими устройствами 811, 812, 813, 814 для приема и отправки входных и выходных сигналов. Эти входные и выходные сигналы могут быть выполнены в виде форм волны, импульсов или иных атрибутов, которые устройства 811, 813 приема входного сигнала могут обнаружить в качестве информации и которые могут быть преобразованы в сигналы, которые может обработать блок 801 вычисления. Эти сигналы затем подаются блоку вычисления. Устройства 812, 814 отправки выходного сигнала выполнены с возможностью преобразования, например посредством их модуляции, сигналов, принятых от блока 801 вычисления, для формирования выходных сигналов, которые могут быть переданы другим частям системы экономичного автоматического поддержания скорости.
Каждое из соединений с соответствующими устройствами для приема и отправки входных и выходных сигналов может быть выполнено в виде одного или более из следующего: кабеля, шины данных, например шины CAN (Сеть Зоны Контроллеров), шины MOST (Транспортировки Ориентированных на Мультимедиа Систем) или некой другой конфигурации шины или беспроводного соединения. Специалисту в соответствующей области следует иметь в виду, что вышеупомянутый компьютер может быть выполнен в виде блока 801 вычисления, а что вышеупомянутая память может быть выполнена в виде блока 802 памяти.
Специалистам в данной области техники будет понятно, что вышеприведенная система может быть изменена в соответствии с различными вариантами осуществления способа согласно изобретению. Изобретение также относится к автомобилю, например легковому автомобилю, грузовому автомобилю или автобусу, оборудованному по меньшей мере одной экономичной системой автоматического поддержания скорости движения в соответствии с изобретением.
Настоящее изобретение не ограничивается описанными выше вариантами его осуществления, а относится ко всем вариантам осуществления и содержит все варианты осуществления в рамках объема правовой охраны приложенных независимых пунктов формулы изобретения.

Группа изобретений относится к области автомобилестроения. Способ экономичного автоматического поддержания скорости заключается в том, что регулирование опорной скорости vref разрешают, когда опорная скорость vref отличается от установленной скорости vset. Регулирование основано на вводе со стороны пользователя экономичного автоматического поддержания скорости, причем ввод воздействует на опорную скорость vref. Система экономичного автоматического поддержания скорости выполнена с возможностью требования от системы двигателя транспортного средства опорной скорости vref, которая может отличаться от выбранной установленной скорости vset. Система содержит блок регулирования, выполненный с возможностью разрешения регулирования опорной скорости vref. Достигается возможность движения транспортного средства с заданной постоянной скоростью. 2 н. и 17 з.п. ф-лы, 8 ил.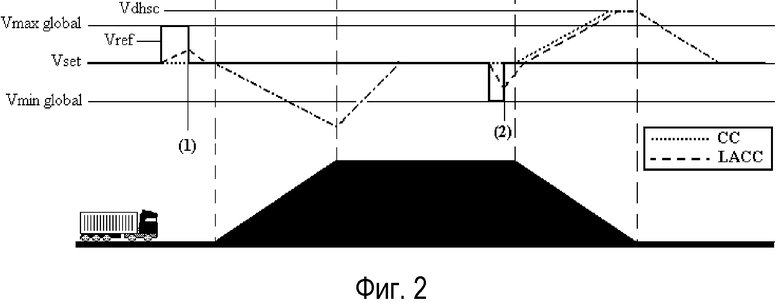
1. Способ экономичного автоматического поддержания скорости, который требует от системы двигателя опорной скорости vref, которая может отличаться от выбранной установленной скорости vset,
отличающийся тем, что регулирование по меньшей мере упомянутой опорной скорости vref разрешают, когда упомянутая опорная скорость vref отличается от упомянутой установленной скорости vset, при этом регулирование основано на вводе со стороны пользователя упомянутого экономичного автоматического поддержания скорости, причем упомянутый ввод воздействует на упомянутую опорную скорость vref.
2. Способ по п. 1, в котором упомянутое регулирование приводит к тому, что упомянутую опорную скорость vref устанавливают равной установленной скорости vset таким образом, что vref=vset.
3. Способ по п. 2, в котором установленную скорость vset устанавливают в отрегулированное с повышением значение
vset, old+vadj перед упомянутым регулированием упомянутой опорной скорости vref таким образом, что vref=vset=vset, old+vadj.
4. Способ по п. 2, в котором установленную скорость vset устанавливают в отрегулированное с понижением значение vset, old-vadj перед упомянутым регулированием упомянутой опорной скорости vref таким образом, что vref=vset=vset, old-vadj.
5. Способ по п. 1, в котором упомянутое регулирование приводит к тому, что упомянутая опорная скорость vref устанавливается равной текущей скорости vpres таким образом, что vref=vpres.
6. Способ по п. 5, в котором упомянутая текущая скорость vpres является временно наименьшей скоростью vmin temp таким образом, что vref=vmin temp.
7. Способ по п. 5, в котором упомянутая текущая скорость vpres является временно наибольшей скоростью vmax temp таким образом, что vref=vmax temp.
8. Способ по п. 1, в котором упомянутое регулирование приводит к тому, что упомянутая опорная скорость vref устанавливается в отрегулированное с повышением значение vref, old+vadj.
9. Способ по п. 1, в котором упомянутое регулирование приводит к тому, что упомянутая опорная скорость vref устанавливается в отрегулированное с понижением значение vref, oid-vadj.
10. Способ по любому из пп. 1-9, в котором упомянутое регулирование упомянутой опорной скорости vref применяют для расстояния S.
11. Способ по п. 10, в котором по меньшей мере одна конкретная ситуация вождения продолжается на протяжении упомянутого расстояния S.
12. Способ по п. 10, в котором конец упомянутого расстояния S достигается, когда выполняется условие деактивации.
13. Способ по п. 12, в котором упомянутое условие деактивации относится к любому из следующих событий:
- переключение передачи,
- торможение,
- приведение в действие сцепления,
- изменение требуемого крутящего момента двигателя,
- новый ввод со стороны упомянутого пользователя и
- достижение заданной части упомянутого расстояния S.
14. Способ по п. 11, в котором упомянутая конкретная ситуация вождения содержит по меньшей мере одно из следующего:
- движение на подъеме,
- движение на спуске,
- обгон,
- ускорение, и
- тоннель.
15. Способ по любому из пп. 1-9 или 11-14, в котором упомянутое регулирование приводит к тому, что упомянутое экономичное автоматическое поддержание скорости применяет опорную скорость vref, которая в соответствии с упомянутым экономичным автоматическим поддержанием скорости является субоптимизированной.
16. Способ по любому из пп. 1-9 или 11-14, в котором упомянутое регулирование налагает на управление упомянутой опорной скоростью vref ограничение, которое применяется упомянутым экономичным автоматическим поддержанием скорости.
17. Способ по любому из пп. 1-9 или 11-14, в котором упомянутый ввод выполняют посредством по меньшей мере одного из следующих устройств ввода:
- кнопки
- рычага
- рукоятки
- педали
- сенсорного экрана
- устройства голосового ввода и
- выбора меню.
18. Способ по любому из пп. 1-9 или 11-14, в котором упомянутое экономичное автоматическое поддержание скорости является автоматическим поддержанием скорости, которое использует сведения об участках дороги впереди.
19. Система экономичного автоматического поддержания скорости, выполненная с возможностью требования от системы двигателя транспортного средства опорной скорости vref, которая может отличаться от выбранной установленной скорости vset,
отличающаяся блоком регулирования, выполненным с возможностью разрешения регулирования по меньшей мере упомянутой опорной скорости vref, когда она отличается от упомянутой установленной скорости vset, и тем, что упомянутое регулирование основано на вводе со стороны пользователя упомянутой системы экономичного автоматического поддержания скорости, при этом упомянутый ввод выполнен с возможностью воздействия на упомянутую опорную скорость vref.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| DE 102008038078 A1, 14.05.2009 | |||
| DE 102005014149 A1, 20.10.2005 | |||
| Нетканый волокнистый материал | 1979 |
|
SU813988A1 |
| KR 20090078954 A, 21.07.2009 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 6496108 B1, 17.12.2002 | |||
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТНЫМИ И НАГРУЗОЧНЫМИ РЕЖИМАМИ | 1991 |
|
RU2010734C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РЕЖИМОМ РАБОТЫ АВТОМОБИЛЬНОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1988 |
|
RU2076049C1 |

