Изобретение относится к области ядерной энергетики и может быть использовано преимущественно для перегрузки в ядерных реакторах с жидкометаллическим теплоносителем.
При перегрузке тепловыделяющих сборок (ТВС) и изделий активной зоны в ядерном реакторе с жидкометаллическим теплоносителем необходимо осуществить технологические операции по сцеплению и расцеплению грузозахватного устройства с перегружаемым изделием в условиях ядерной и радиационной безопасности.
Известен захват перегрузочной машины (А.с. RU №635032 А1, В66С 1/66, опубл. 30.11.1978), содержащий корпус, в котором установлен гидробуфер с подпружиненным поршнем, захватные рычаги, взаимодействующие с копиром, связанным с подвижными зубчатыми рейками, закрепленными на концах подъемных цепей и взаимодействующими с зубчатым колесом, расположенным между ними. Гидропоршень выполнен с направляющими, в которых расположены зубчатые рейки. Зубчатое колесо имеет цилиндрическую часть, взаимодействующую с зубчатыми рейками, и коническую часть. Копир снабжен шлицевым валом, имеющим на свободном конце коническое зубчатое колесо, взаимодействующее с конической частью зубчатого колеса.
Известно грузозахватное устройство (А.с. RU №734129 С1, В66С 1/66, опубл. 15.05.1980), содержащее размещенный в направляющей корпус, установленную с возможностью перемещения относительно корпуса головку с захватными рычагами и зубчато-реечный привод, связанный с рычагами посредством буфера и копира. В корпусе устройства установлена втулка с шарнирно укрепленными на ней подпружиненными тормозными рычагами с выступами для взаимодействия с направляющей, а на головке шарнирно закреплены управляющие кулачки, взаимодействующие с тормозными рычагами и копиром.
Известно захватное устройство (А.с. №1813691 A1, В66С 1/10, опубл. 07.05.1993), содержащее направляющую трубу, цилиндрический корпус и их приводы и размещенные на цилиндрическом корпусе захватные рычаги. А также захватное устройство снабжено конечными выключателями путевой автоматики, установленными с возможностью взаимодействия с элементом передачи движения привода направляющей трубы и включенными в цепь управления приводом, и датчиком нагрузки, установленным с возможностью взаимодействия с подвижными элементами привода цилиндрического корпуса и включенным в цепь привода направляющей трубы.
Общим недостатком вышеперечисленных известных захватных устройств является наличие подвижных шарнирных рычагов, подпружиненных элементов, подвижных реек и зубчатых колес, что приводит к снижению надежности работы и эксплуатационных возможностей. Кроме того, компоновка подобных захватных устройств имеет значительные габариты.
В основу изобретения положена задача разработки конструкции грузозахватного устройства, позволяющего выполнить технологические операции по перегрузке ТВС и изделий активной зоны в стесненных условиях и при сохранении работоспособности механизмов под воздействием жидкометаллического теплоносителя.
Для решения поставленной задачи предложена конструкция грузозахватного устройства для ТВС и изделий активной зоны.
Сущность предлагаемого технического решения заключается в том, что грузозахватное устройство для ТВС и изделий активной зоны содержит съемный захват и каретку с возможностью перемещения в направляющей трубе разгрузочно-загрузочной машины. Захват состоит из несущей трубы с коническим упором и цанги с подвижным упором, установленных на упорных подшипниках в каретке.
Для возможности управления захватом используется каретка, дающая возможность поворота захвату и позволяющая преобразовывать:
- относительное движение управляющей цепи в относительное движение цанги;
- перемещение грузозахватного устройства для ТВС и изделий активной зоны несущими цепями без изменения состояния последнего.
Каретка состоит из корпуса, соединенного с несущими цепями, и ползуна, соединенного с использующейся при открытии управляющей цепью. Корпус каретки развязан подшипниками качения от несущей трубы с коническим упором и имеет возможность осевого перемещения в направляющей трубе в подшипниках скольжения. При подъеме и опускании грузозахватного устройства для ТВС и изделий активной зоны цепи (управляющая и несущие) двигаются одновременно. При управлении захватом управляющая цепь имеет возможность двигаться относительно несущих цепей, перемещая цангу с подвижным упором.
При использовании предлагаемого изобретения могут быть получены следующие технические результаты:
- упрощение конструкции грузозахватного устройства;
- уменьшение диаметральных габаритов грузозахватного устройства;
- повышение функциональной надежности грузозахватного устройства;
- повышение безопасности работы, в т.ч. исключение падения ТВС и изделий активной зоны;
- возможность контакта только захвата с жидкометаллическим теплоносителем в реакторе;
- упрощение обслуживания грузозахватного устройства;
- расширение эксплуатационных возможностей грузозахватного устройства.
Технические результаты достигаются за счет того, что:
- захват в грузозахватном устройстве выполнен съемным;
- из конструкции захвата устранены шарнирные рычаги, пружины и зубчатые колеса;
- каретка связана с «толкающими» (несущими и управляющей) цепями, обеспечивающими вертикальное перемещение и позволяющими производить перегрузку в реакторе ТВС и изделий активной зоны с преодолением сил сопротивления жидкометаллического теплоносителя;
- цанга с подвижным упором снабжена гибкими лепестками для плотного охвата оголовка перегружаемого изделия, и их конусное исполнение позволяет при взаимном перемещении элементов захвата при его закрытии снимать нагрузку с подвижных лепестков цанги и передавать ее на конический упор несущей трубы;
- каретка имеет возможность фиксированного по высоте перемещения в направляющей трубе и в жидкометаллический теплоноситель не опускается.
Заявляемое изобретение поясняется следующими чертежами, представленными на фиг. 1-2.
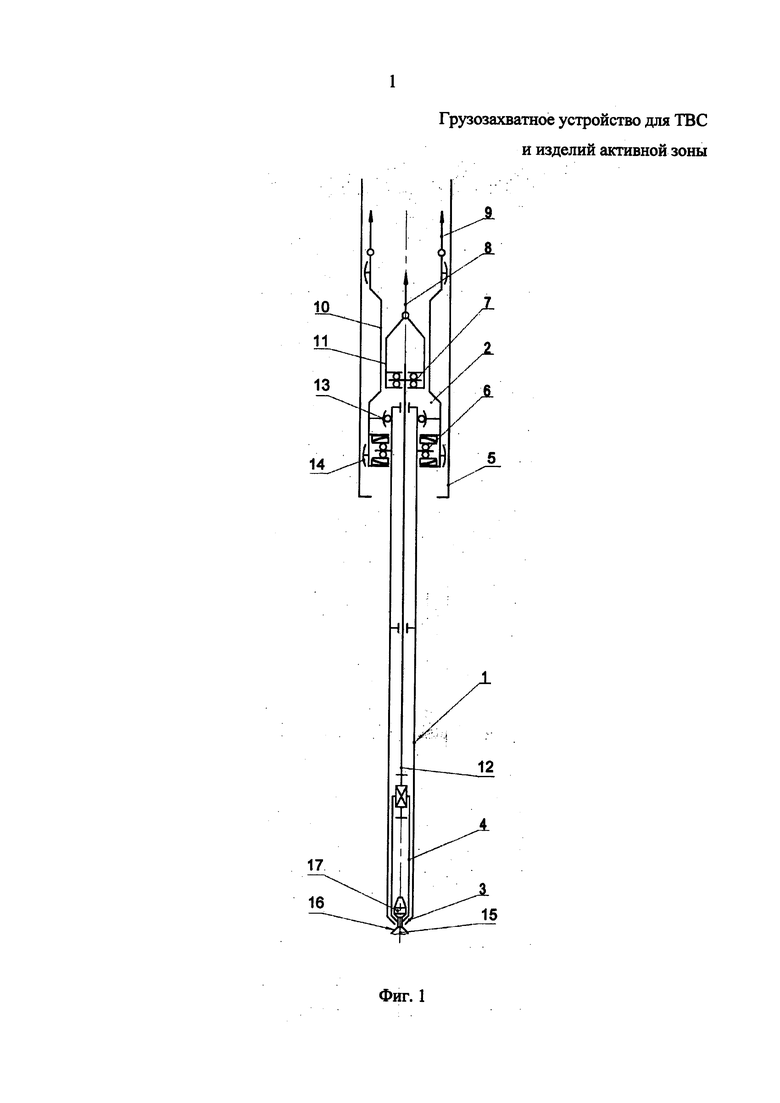
фиг. 1 - общий вид захвата для транспортирования ТВС и изделий активной зоны;
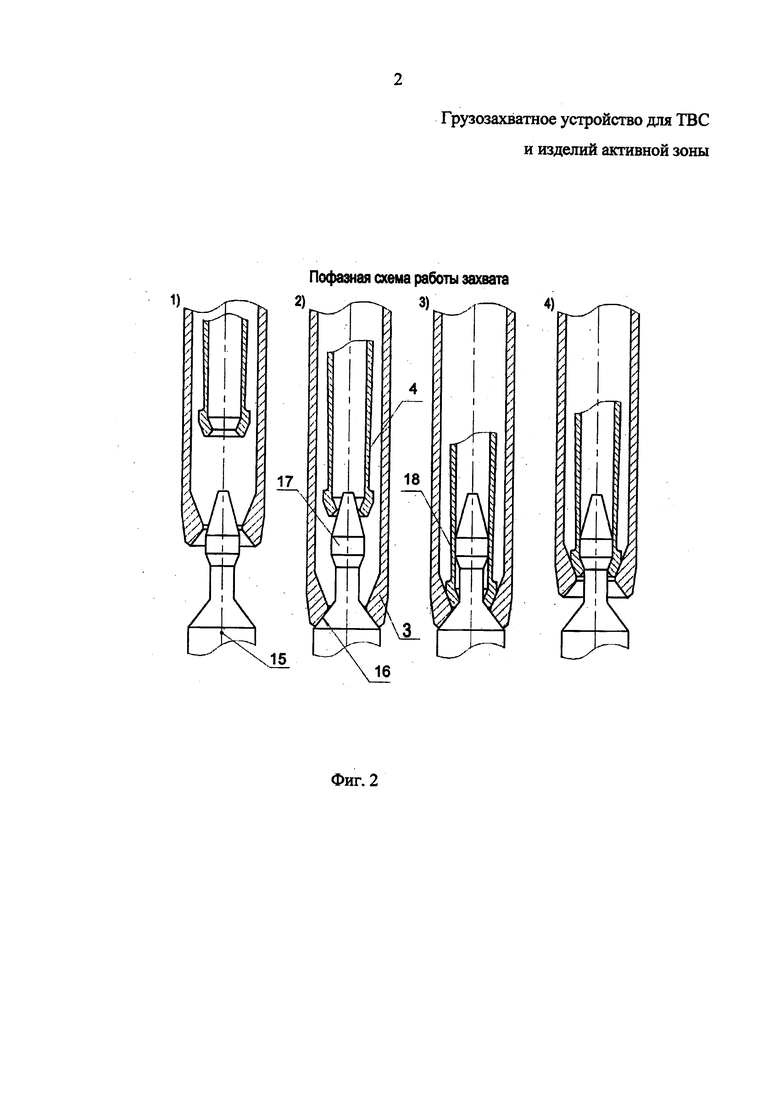
фиг. 2 - пофазная схема работы захвата.
Грузозахватное устройство для ТВС и изделий активной зоны (фиг. 1) состоит из захвата 1 и каретки 2. Захват 1 содержит несущую трубу 3 с коническим упором и цангу 4 с подвижным упором. Захват 1 выполнен съемным. Каретка 2 имеет возможность ограниченного перемещения в направляющей трубе 5 разгрузочно-загрузочной машины (на чертеже не показана). Несущая труба 3 с коническим упором и цанга 4 с подвижным упором установлены на упорных подшипниках 6 и 7 в каретке 2.
Каретка 2 используется для возможности управления захватом 1. Она предназначена преобразовывать относительное движение управляющей цепи 8 в относительное движение цанги 4 с подвижным упором и позволяет перемещать грузозахватное устройство для ТВС и изделий активной зоны несущими цепями 9 без изменения состояния последнего. Также каретка 2 дает возможность поворота захвату 1. Каретка 2 состоит из корпуса 10, который соединен с несущими 9 цепями, и ползуна 11, который соединен с управляющей 8 цепью и цанговым подвесом 12. Корпус 10 каретки 2 развязан подшипниками качения 13 от несущей трубы 3 с коническим упором и имеет возможность осевого перемещения в направляющей трубе 5 в подшипниках скольжения 14. При подъеме и опускании грузозахватного устройства для ТВС и изделий активной зоны цепи (одна управляющая 8 и две несущие 9) двигаются одновременно. При необходимости управления захватом 1 управляющая цепь 8 имеет возможность движения относительно несущих цепей 9, что позволяет перемещать цангу 4 с подвижным упором на цанговом подвесе 12 относительно перегружаемого изделия 15, имеющего конусную часть 16 с оголовком 17 (фиг. 2). Цанга 4 с подвижным упором установлена в ползуне 11 каретки 2 на упорных подшипниках 7 через цанговый подвес 12. Цанга 4 с подвижным упором имеет гибкие лепестки 18 (фиг. 2) для охвата оголовка 17 изделия 15.
Работа грузозахватного устройства для ТВС и изделий активной зоны происходит следующим образом.
Пофазная схема работы захвата 1 показана на фиг. 2.
Цанга 4 с подвижным упором посредством управляющей цепи 8 и цангового подвеса 12 смещается в захвате 1 в верхнее положение. Грузозахватное устройство для ТВС и изделий активной зоны надвигается на головку перегружаемого изделия (оголовок 17 изделия 15) до упора конуса конического упора несущей трубы 3 в конусную часть 16 перегружаемого изделия 15 (фиг. 2, фаза 2). Затем цангу 4 с подвижным упором посредством управляющей цепи 8 перемещают в нижнее положение (фиг. 2, фаза 3), при этом гибкие лепестки 18 позволяют подвижному упору цанги 4 переместиться через оголовок 17 изделия 15.
Далее производят подъем грузозахватного устройства для ТВС и изделий активной зоны одновременным выбором несущих 9 и управляющей 8 цепей. Причем свободный цанговый подвес 12 разгружает цангу 4 с подвижным упором от веса управляющей цепи 8. Подвижный упор цанги 4 оказывается зажатым между коническим упором несущей трубы 3 и оголовком 17 изделия 15 (фиг. 2, фаза 4). Подвижный упор цанги 4 передает усилие подъема с несущей трубы 3 с коническим упором на оголовок 17 изделия 15, поднимая перегружаемое изделие 15.
Разъединение захвата 1 и изделия 15 производят только после установки изделия 15 на упор (дополнительная степень защиты) в обратном порядке.
Таким образом, предложенное устройство обеспечивает выполнение технологических операций по перегрузке ТВС и изделий активной зоны с сохранением работоспособности механизмов захвата при воздействии жидкометаллического теплоносителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУППОВОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1999 |
|
RU2170698C1 |
| ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО С ПЕРЕХОДНЫМ БЛОКОМ ДЛЯ УСТАНОВКИ И ИЗВЛЕЧЕНИЯ ИЗ ЯДЕРНОГО РЕАКТОРА ЭЛЕМЕНТОВ АКТИВНОЙ ЗОНЫ | 2014 |
|
RU2569336C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО И МЕХАНИЗМ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ЗАХВАТНЫМ РЫЧАГОВ, ИСПОЛЬЗУЕМЫЙ В НЕМ | 2013 |
|
RU2540977C1 |
| КАНАЛ НАПРАВЛЯЮЩИЙ | 2014 |
|
RU2580522C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2014 |
|
RU2581099C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ВЫЕМНОГО БЛОКА | 2013 |
|
RU2547031C1 |
| КАНАЛ ТЕХНОЛОГИЧЕСКИЙ СОВМЕЩЕННЫЙ ДЛЯ ПРОМЫШЛЕННОЙ ЯДЕРНОЙ УСТАНОВКИ | 2015 |
|
RU2577783C1 |
| НАВОДЯЩЕЕ УСТРОЙСТВО | 2011 |
|
RU2487832C1 |
| УЗЕЛ КРЕПЛЕНИЯ ТЕПЛОВЫДЕЛЯЮЩЕЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА | 2021 |
|
RU2764061C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2014 |
|
RU2582746C1 |
Изобретение относится к области ядерной энергетики и может быть использовано преимущественно для перегрузки в ядерных реакторах с жидкометаллическим теплоносителем. Грузозахватное устройство для ТВС и изделий активной зоны содержит захват и каретку с возможностью перемещения в направляющей трубе разгрузочно-загрузочной машины. Захват состоит из несущей трубы с коническим упором и цанги с подвижным упором, установленных в каретке на упорных подшипниках. Для возможности управления захватом используется каретка и «толкающие» (управляющая и несущие) цепи. Технический результат заключается в упрощении конструкции захватного устройства, используемого при перегрузке в ядерном реакторе с жидкометаллическим теплоносителем, и, соответственно, в уменьшении его габаритов и повышении надежности работы. Изобретение обеспечивает расширение эксплуатационных возможностей грузозахватного устройства. 2 з.п. ф-лы, 2 ил.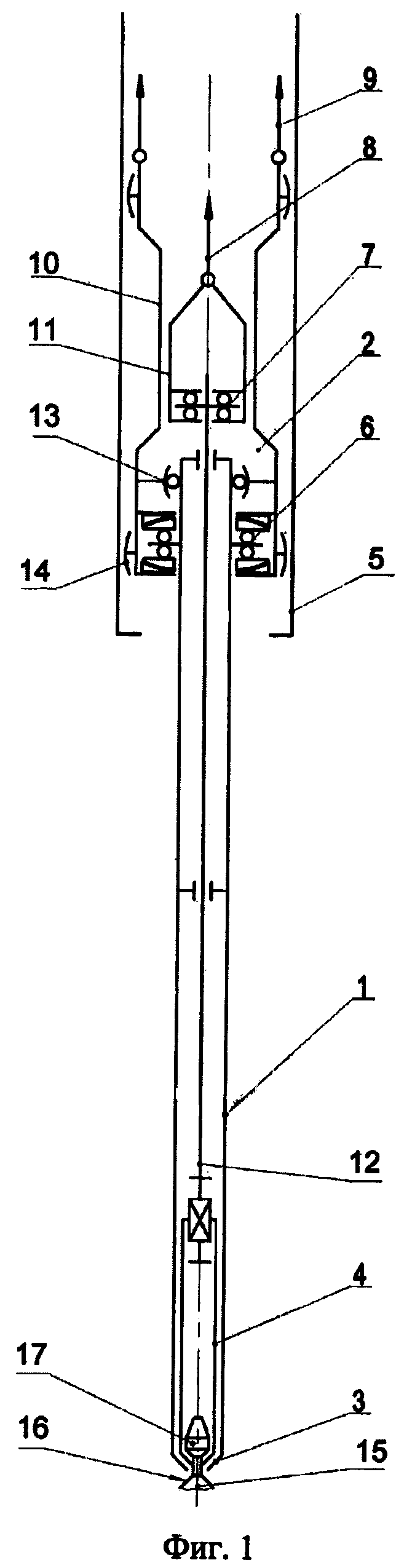
1. Грузозахватное устройство для ТВС и изделий активной зоны, характеризующееся тем, что содержит захват и каретку с возможностью перемещения в направляющей трубе разгрузочно-загрузочной машины, причем захват состоит из несущей трубы с коническим упором и цанги с подвижным упором, установленных на упорных подшипниках в каретке, состоящей из корпуса и ползуна.
2. Устройство по п. 1, характеризующееся тем, что корпус каретки развязан подшипниками качения от несущей трубы с коническим упором, имеет возможность осевого перемещения в направляющей трубе в подшипниках скольжения.
3. Устройство по п. 1, характеризующееся тем, что цанга с подвижным упором снабжена гибкими лепестками цанги для охвата оголовка перегружаемого изделия.
| ЗАХВАТНОЕ УСТРОЙСТВО | 2012 |
|
RU2525191C1 |
| СПОСОБ ПРОИЗВОДСТВА ХЛЕБНОГО КВАСА | 2015 |
|
RU2587490C1 |
| US4814138 A1, 21.03.1989 | |||
| US3941413 A1, 02.03.1976. | |||

