Изобретение относится к подъемно-транспортной технике, в частности к грузозахватным устройствам для изделий с отверстиями и углублениями, и может быть использовано в ядерной энергетике (преимущественно для оснащения подъемно-опускных механизмов, работающих с тепловыделяющими сборками ядерных реакторов).
При эксплуатации применяемых конструкций реакторов с цилиндрическими стержневыми твэлами (например, типа РБМК) процесс перемещения отработавшего ядерного топлива (ОЯТ) в транспортные контейнеры (в частности, с целью отправки на завод химической регенерации) [1] существенно ускоряется в том случае, когда тепловыделяющие сборки (ТВС) или, применительно к РБМК, выделенные из ТВС пучки твэлов (ПТ) с ОЯТ помещают в накопитель с фиксированной конфигурацией гнезд, расположенный в радиационно-защитной камере, после наполнения которого их перегружают группами в транспортный контейнер с той же конфигурацией гнезд. В процессе установки в контейнер наводку и пространственную ориентацию всех ТВС (ПТ) осуществляют, например, посредством выступающего торца одной из ТВС (одного ПТ) [2]. Верхние концы вертикально расположенных ТВС (ПТ) во время перегрузки удерживают соответствующими захватами.
Известно захватное устройство для изделий с отверстием [3], содержащее штангу с Т-образным хвостовиком на нижнем конце и наружную подпружиненную втулку с выступами, смещенными относительно Т- образного хвостовика штанги. Применение этого устройства ограничено изделиями, в которых выполнены продольные пазы, предназначенные для взаимодействия с выступами Т-образного хвостовика.
Известно захватное устройство инженеров П.М. и Г.П.Симоновых [4] для грузов с отверстиями, содержащее подвижный клин с кольцевой проточкой и охватывающую клин разрезную цанговую втулку с пазами, с которыми взаимодействуют пальцы, и подпружиненными шариками, взаимодействующими с кольцевой проточкой. Для срабатывания этого захвата необходимы сравнимые с его длиной вертикальные перемещения узла подвески устройства к подъемно-опускному механизму, что не для всякого груза (например, группы ТВС или ПТ) приемлемо.
Известен автоматический захват для транспортировки тепловыделяющих сборок ядерных реакторов [5], содержащий цилиндрический корпус с шарнирно прикрепленными захватными лапами, полую штангу с конусным наконечником и фигурными пазами в нижней части для захватных лап. Такие устройства, объединенные в группу, не обеспечивают относительное смещение вывешенных ТВС или ПТ по высоте (что необходимо для реализации способа [2]) так же, как и предыдущий аналог.
Предлагаемое устройство позволяет производить операции одновременно с несколькими деталями, обеспечивая срабатывание захватов без участия подъемно-опускного механизма, относительное смещение вывешенных деталей по высоте и приблизительно одинаковое усилие удержания каждой из них, при этом не требуя дополнительного профилирования захватываемых деталей. Сущность изобретения заключается в том, что групповое захватное устройство, содержащее основание, предназначенное для присоединения к подъемно-опускному механизму, и захват, включающий корпус и подвижный относительно корпуса стержень с коническим наконечником, содержит не менее двух однотипных захватов, причем каждый захват включает закрепленную на корпусе цангу, коаксиальную стержню с коническим наконечником указанного захвата, с захватными лапами, предназначенными для взаимодействия с грузом, выполнено с упругой связью корпуса каждого захвата с основанием, реакция которой на корпус противоположна по направлению силе тяжести, действующей на груз, причем жесткость связей любой пары захватов различается, по меньшей мере, на гарантированную величину, обеспечивающую минимально требуемое относительное смещение грузов, снабжено приводом для перемещения стержней, а в каждом захвате кинематическая цепь передачи от привода к стержню содержит тягу, проходящую через полый винт и опирающуюся на него своим дальним от стержня концом, установленную в корпусе с возможностью вращения на подшипниках гайку, составляющую винтовую пару с упомянутым винтом и соединенную шлицами с охватывающим ее зубчатым колесом, предназначенным для взаимодействия с зубчатым колесом - выходным звеном привода, и снабжена пружиной сжатия, охватывающей упомянутую тягу и размещенной между буртиком на ближнем к стержню конце тяги и крышкой охватывающего пружину стакана, с дном которого скреплен стержень. В частном случае упругая связь корпуса каждого захвата с основанием выполнена с использованием охватывающей корпус пружины сжатия, размещенной между заплечиками корпуса и дном закрепленного на основании стакана, предназначенного для размещения захвата.
Упругая связь разной жесткости между корпусами захватов и основанием обеспечивает (под действием силы тяжести) относительное смещение по высоте вывешенных ПТ (одинаковой массы) и разные уровни их нижних торцов. Упругая связь между стержнями и кинематической цепью передачи позволяет применить в приводе один двигатель для перемещения всех стержней, обеспечивая независимость функционирования отдельных захватов (после заклинивания захватных лап цанги в полости груза под воздействием конусного наконечника стержня кинематическая цепь передачи сработавшего захвата будет продолжать двигаться, не внося существенного возмущения в работу двигателя и, следовательно, еще не сработавших захватов) и приблизительно одинаковое усилие удержания груза каждым захватом, а также предохраняет от случайного отпускания захваченного груза.
Изобретение (в частном случае выполнения) поясняется чертежами:
Фиг. 1 - сечение захватного устройства по вертикальной плоскости;
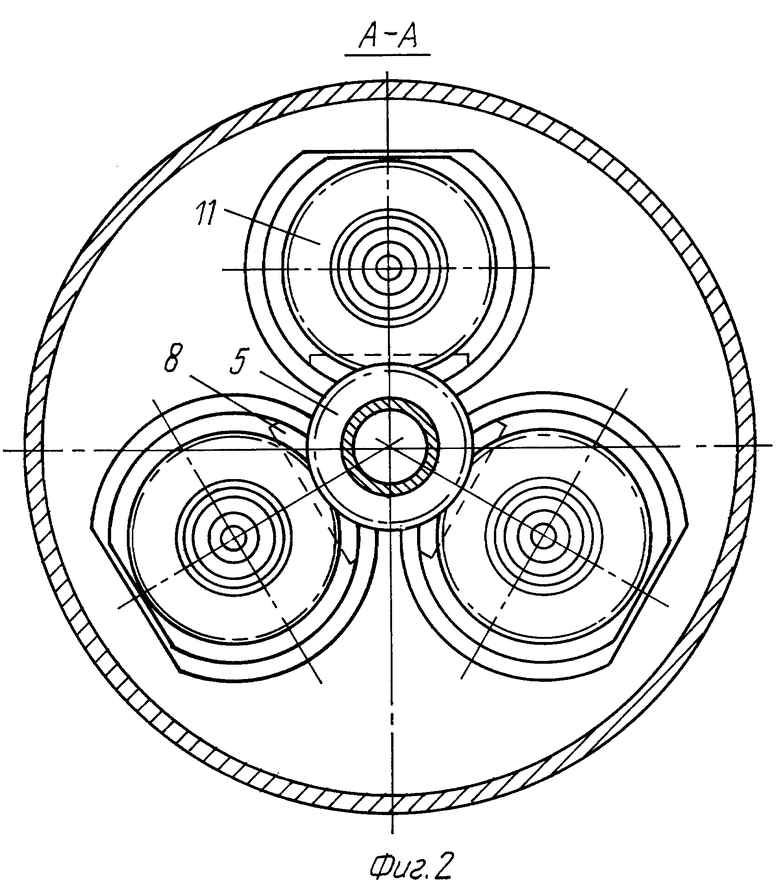
Фиг. 2 - сечение захватного устройства по горизонтальной плоскости;
Фиг. 3 - сечение захвата по вертикальной плоскости;
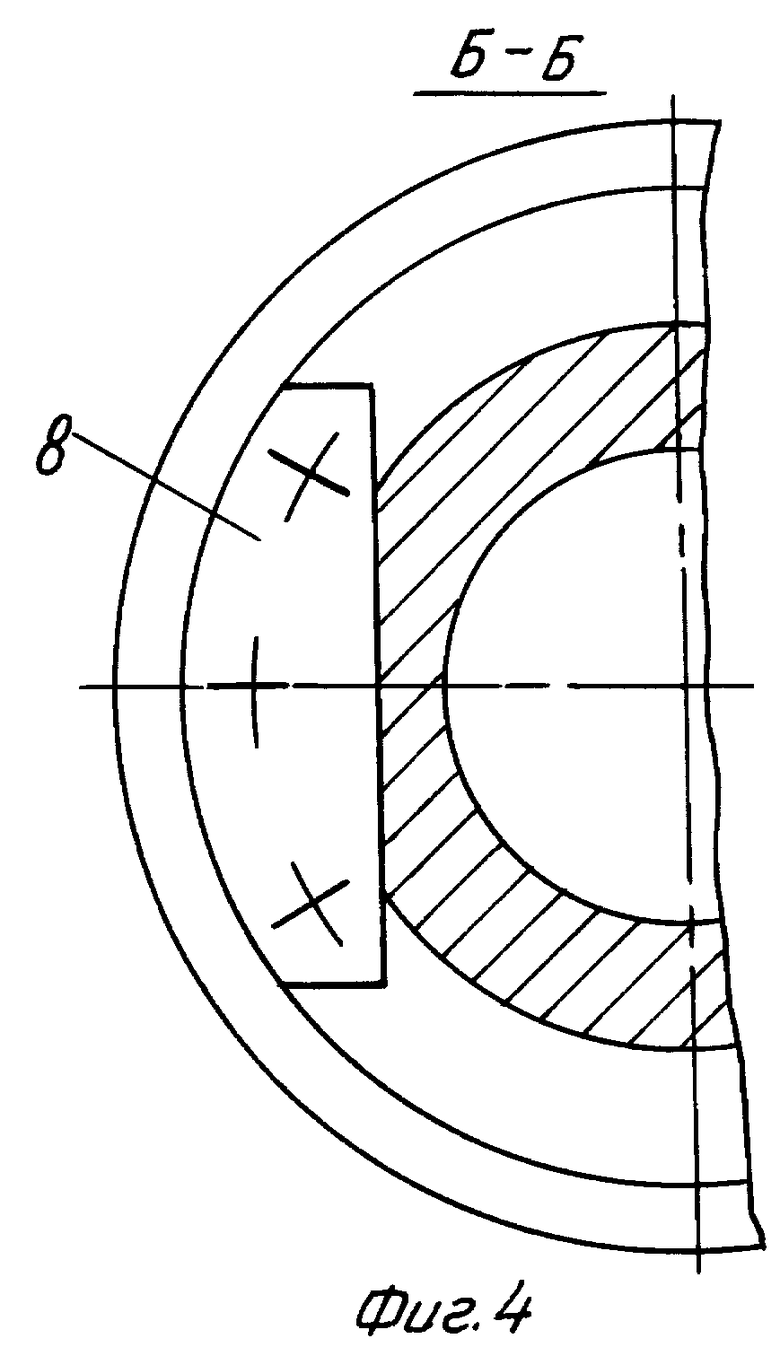
Фиг. 4 - сечение захвата по горизонтальной плоскости.
Групповое захватное устройство содержит не менее двух (например, три) однотипных захватов 1, проекции которых на горизонтальную плоскость образуют требуемую по технологии конфигурацию (например, равносторонний треугольник), основание 2 с закрепленными на нем стаканами 3 и двигатель 4 привода стержней с выходным звеном в виде зубчатого колеса 5.
Корпус 6 каждого захвата 1 при помощи пружины сжатия 7 опирается на дно стакана 3. Жесткость пружин любой пары захватов различается, по меньшей мере, на гарантированную величину, обеспечивающую минимально требуемое относительное смещение вывешенных ПТ. Планка 8 удерживает корпус 6 от вращения и ограничивает вертикальное смещение корпуса вверх относительно стакана 3. На корпусе 6 с помощью резьбы закреплена цанга с захватными лапами 9. В верхней части корпуса 6 на подшипниках с возможностью вращения вокруг вертикальной оси установлена гайка 10, взаимодействующая с зубчатым колесом 11 при помощи шлицевого соединения. Через внутреннюю полость винта 12, составляющего вместе с гайкой 10 винтовую пару, пропущена ступенчатая тяга 13. Гайка 14 ограничивает вертикальное смещение тяги вниз относительно винта 12, а цилиндрический штифт 15 и шпонка 16 удерживают винт 12 от вращения. Ширина венца колеса 5 превышает ширину венца колес 11 на величину максимально требуемого перемещения тяги 13. Вокруг верхней части тяги 13 внутри винта 12 размещена пружина сжатия 17. Другая пружина сжатия 18 размещена между буртиком тяги 13 и крышкой 19, скрепленной (при помощи резьбы) со стаканом 20. На стакане 20 закреплен (при помощи резьбы) стержень 21 с конусным наконечником 22.
Предлагаемое устройство работает следующим образом. Для выгрузки ПТ из накопителя вводят нижние части стержней 21 с наконечниками 22 и захватные лапы 9 в полость центральной трубы 23 ПТ; при неточном попадании стержня в полость трубы пружина 17, сжимаясь, обеспечивает возможность перемещения стержня и связанных с ним деталей, не допуская жесткого удара. Затем с помощью двигателя 4 вращают зубчатое колесо 5, вызывая вращение взаимодействующих с ним зубчатых колес 11 и связанных с последними гаек 10. В каждом захвате за счет вращения гайки 10 винт 12 перемещается вверх и, упираясь в гайку 14, увлекает за собой тягу 13, которая, воздействуя через пружину 18 на крышку 19 и, соответственно, на стакан 20, вызывает перемещение вверх стержня 21. При этом последний конусным наконечником 22 постепенно разводит лапы 9. После заклинивания лап 9 внутри трубы 23 стержень 21 будет продолжать движение (под воздействием двигателя) за счет сжатия пружины 18. После захвата всех выбранных ПТ двигатель 4 останавливают. При последующем подъеме и размещении захваченных ПТ в объеме защитно-перегрузочного агрегата они расположатся на разных уровнях по высоте за счет различной жесткости пружин 7 в разных захватных органах (чем больше жесткость, тем выше уровень нижнего конца ПТ). Отпусканию захваченного груза при случайном сближении тяги 13 и стержня 21 препятствует, разжимаясь и прижимая конусный наконечник 22 к лапам 9, пружина 18, сжатая при захвате груза. При загрузке ПТ в транспортный контейнер нижние концы захваченных ПТ последовательно вводят в гнезда контейнера, а затем всю группу ПТ опускают. Далее с помощью двигателя 4 вращают зубчатое колесо 5 (в противоположном по сравнению с выгрузкой направлении), приводя во вращение взаимодействующие с ним зубчатые колеса 11 и связанные с последними гайки 10. В каждом захвате за счет вращения гайки 10 винт 12 перемещается вниз, вследствие чего тяга 13, опирающаяся гайкой 14 на винт 12, также опускается, вызывая перемещение пружины 18, крышки 19, стакана 20 и, соответственно, стержня 21 вниз. При опускании конусного наконечника 22 лапы 9 постепенно сходятся, вследствие чего захват отсоединяется от ПТ. После срабатывания всех захватов двигатель 4 останавливают.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Иванов В.А Эксплуатация АЭС: Учебник для вузов. - СПб.: Энергоатомиздат, Санкт - Петербургское отд-ние, 1994.
2. Патент РФ N 2094863, кл. 6 G 21 C 19/00, 19/32. опубл. 1997.
3. Авторское свидетельство СССР N 812689, кл.3 B 66 C 1/66, опубл.1981.
4. Авторское свидетельство СССР N 563352, кл.2 B 66 C 1/66, опубл. 1977.
5. Авторское свидетельство СССР N 415947, кл.3 B 66 C 1/66, опубл. 1984,
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАГРУЗКИ ОТРАБОТАВШЕЙ ТЕПЛОВЫДЕЛЯЮЩЕЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА В АМПУЛУ ДЛЯ ПОСЛЕДУЮЩЕГО ЕЕ ХРАНЕНИЯ И АМПУЛА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2006 |
|
RU2328046C2 |
| НАСОСНЫЙ АГРЕГАТ | 2000 |
|
RU2191928C2 |
| АМПУЛА ДЛЯ ОТРАБОТАВШЕЙ ТЕПЛОВЫДЕЛЯЮЩЕЙ СБОРКИ | 2008 |
|
RU2353010C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТОПЛИВНОЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА | 1996 |
|
RU2092917C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ТЕПЛОВЫДЕЛЯЮЩИХ СБОРОК ЯДЕРНОГО РЕАКТОРА | 1992 |
|
RU2086013C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ЧАСТИЧНО ПОВРЕЖДЕННОЙ ДВУХПУЧКОВОЙ ТОПЛИВНОЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА, КАМЕРА ДЛЯ РАЗДЕЛКИ И ФАЛЬШТВЭЛ ДЛЯ ВОССТАНОВЛЕНИЯ ТОПЛИВНОЙ СБОРКИ | 1992 |
|
RU2072569C1 |
| СПОСОБ РАЗДЕЛКИ ОТРАБОТАВШЕЙ ДВУХПУЧКОВОЙ ТОПЛИВНОЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА ДЛЯ ПОСЛЕДУЮЩЕГО ХРАНЕНИЯ И КАМЕРА РАЗДЕЛКИ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1999 |
|
RU2171508C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО НАВЕШИВАНИЯ ГРУЗА НА ДВУРОГИЙ КРЮК КРАНА | 1990 |
|
RU2034768C1 |
| ТЕПЛОВЫДЕЛЯЮЩАЯ СБОРКА ЯДЕРНОГО РЕАКТОРА | 1995 |
|
RU2137223C1 |
| НАВОДЯЩЕЕ УСТРОЙСТВО | 1999 |
|
RU2161588C2 |

Изобретение относится к грузозахватным устройствам. Групповое захватное устройство, преимущественно для тепловыделяющих сборок ядерных реакторов, содержит основание, предназначенное для присоединения к подъемно-опускному механизму, и не менее двух однотипных захватов. Каждый захват включает закрепленную на корпусе цангу, коаксиальную стержню с коническим наконечником указанного захвата, с захватными лапами, предназначенными для взаимодействия с грузом. Имеется упругая связь корпуса каждого захвата с основанием, реакция которой на корпусе противоположна по направлению силе тяжести, действующей на груз, причем жесткость связей любой пары захватов различается, по меньшей мере, на гарантированную величину, обеспечивающую минимально требуемое относительное смещение грузов. Устройство снабжено приводом для перемещения стержней, а в каждом захвате кинематическая цепь передачи от привода к стерню содержит тягу, проходящую через полый винт и опирающуюся на него своим дальним от стержня концом, установленную в корпусе с возможностью вращения на подшипниках гайку, составляющую винтовую пару с упомянутым винтом и соединенную шлицами с охватывающим ее зубчатым колесом, предназначенным для взаимодействия с зубчатым колесом - выходным звеном привода, и снабжена пружиной сжатия, охватывающей упомянутую тягу и размещенной между буртиком на ближнем к стержню конце тяги и крышкой охватывающего пружину стакана, с дном которого скреплен стержень. Изобретение позволяет производить операции одновременно с несколькими деталями. 1 з.п.ф-лы, 4 ил.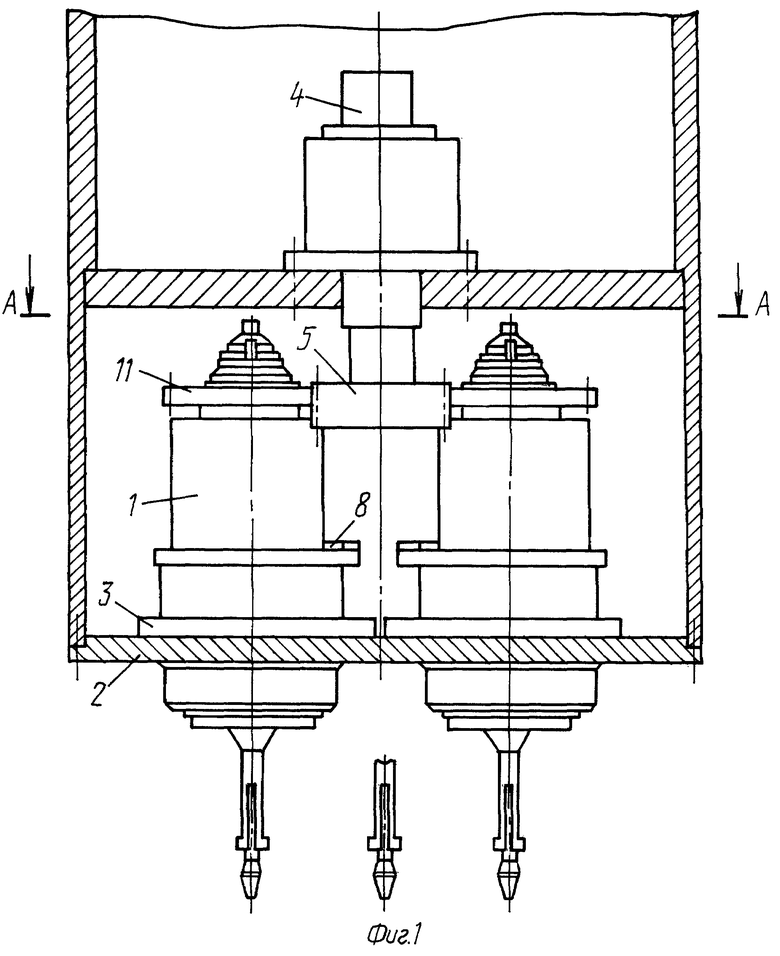
| Автоматический захват для транспортировки тепловыделяющих сборок ядерных реакторов | 1972 |
|
SU415947A1 |
| Захватное устройство для грузов с отверстиями инженеров п.м. и г.п.симоновых | 1974 |
|
SU563352A1 |
| Захватное устройство для изделийС ОТВЕРСТиЕМ | 1973 |
|
SU812689A1 |
| Многоканальное устройство для контроля перерывов электроснабжения | 1983 |
|
SU1112384A1 |

