Изобретение относится к способу моделирования ускорений для человека, на которого действует основное ускорение, которое, по существу, генерируется за счет вращения человека вокруг главной оси на расстоянии и посредством ускорения свободного падения, причем величина и направление основного ускорения определяются, по меньшей мере, за счет ускорения свободного падения, тангенциального ускорения и радиального ускорения, причем положение человека по отношению к направлению основного ускорения, по существу, определяется посредством вращения человека вокруг, по меньшей мере, двух вспомогательных осей, причем вспомогательные оси проходят через центр, который находится в области человека, причем первичные силы, порождающие ошибку, действуют на человека тогда, когда происходит изменение величины и направления основного ускорения, причем упомянутые силы, порождающие ошибку, по меньшей мере, частично компенсируются за счет вращения человека вокруг вспомогательных осей, и при этом вторичные силы, порождающие ошибку, действуют на человека вследствие вращения человека вокруг вспомогательных осей.
Кроме того, настоящее изобретение относится к устройству для моделирования ускорений для человека, содержащему: первый опорный элемент, который содержит устройство фиксации, по меньшей мере, для одного человека и расположен вокруг первой вспомогательной оси с возможностью вращения относительно второго опорного элемента; причем второй опорный элемент расположен вокруг второй вспомогательной оси с возможностью вращения относительно третьего опорного элемента, причем первая вспомогательная ось и вторая вспомогательная ось расположены, по существу, ортогонально друг другу.
Устройство согласно настоящему изобретению и способ согласно настоящему изобретению используют, среди прочего, для моделирования подвижных систем, таких как, например, самолетов, вертолетов, автомобилей, судов или прочего. Виртуальную реальность моделируют для человека, расположенного в кабине или полом теле посредством множества искусственно генерируемых сенсорных восприятий. Эти сенсорные стимулы, с одной стороны, являются аудиовизуальными стимулами, которые подаются пользователю с помощью систем воспроизведения изображения и систем воспроизведения звука, а с другой стороны, ускорения или силы, действующие на пользователя, генерируют посредством устройства и способа. Человеческий мозг интерпретирует характер виртуальных движений через комбинацию аудиовизуальных и физических сенсорных воздействий. Чем точнее сенсорные восприятия соответствуют действительным сенсорным восприятиям таких ситуаций, тем более реалистичной для пользователя становится эта интерпретация. По этой причине очень важно подавать эти сигналы пользователю способом настолько близким к реальности, насколько это возможно. Кроме того, устройство и способ включают в себя возможность моделирования движения под влиянием человека. Таким образом, человек способен, например, контролировать движением моделируемого объекта в виртуальном, моделируемом мире.
Сигналы управления человеком и любыми окружающими влияниями, такими как, например, ветер, неровности дорожного полотна и т.д., подаются на физическую имитационную модель, которая соответствует математическому отображению действительного поведения моделируемого объекта. Она содержит такие параметры, как механические инерции, сопротивления и т.д. Ускорения или силы и их направления, которые предназначены для подачи к пользователю в виртуальном мире, рассчитываются с помощью этой модели. Это происходит путем контроля различных устройств посредством блока управления.
Способы и устройства для моделирования ускорений для человека, в частности, моделирующие устройства передвижения, тренажеры ориентирования и способы их работы, давно известны.
Например, известны одноплечевые центрифуги, в которых человека вращают на определенном расстоянии от главной оси, по существу, по круговой траектории. В дополнение к ускорению свободного падения на человека действует радиальное ускорение, которое, по существу, определяется угловой скоростью и расстоянием между человеком и главной осью вращения. При постоянной угловой скорости основное ускорение, действующее на человека, соответствует результирующему ускорению от ускорения свободного падения и радиального ускорения. Когда происходит изменение в угловой скорости, тангенциальное ускорение также возникает в дополнение к радиальному ускорению. В случае неравномерной угловой скорости основное ускорение, действующее на человека, таким образом, состоит из сложения векторов радиального ускорения, тангенциального ускорения и ускорения свободного падения.
Для того чтобы подавать движение в моделируемом объекте к человеку способом, близком к реальности, человек может быть перемещен и расположен с, по меньшей мере, двумя степенями свободы. Техническое решение для этих степеней свободы возникает с использованием кабины, в которой человек может быть закреплен на сиденье. Кабина расположена с возможностью вращения на роликовом кольце. Роликовое кольцо расположено с возможностью вращения на главном плече одноплечевой центрифуги. Две оси вращения, которые также называют вспомогательными осями, являются ортогональными друг к другу. В соответствии с известным уровнем техники они содержат точку пересечения, которая располагается в области головы человека. Положение человека относительно основного ускорения может быть выбрано посредством двух степеней свободы вращения.
Для того, например, чтобы моделировать линейное ускорение вдоль вертикальной оси тела, человек перемещается по орбите вокруг главной оси вращения.
Направление взгляда человека проходит по касательной. Угловая скорость затем увеличивается, в результате чего результирующее основное ускорение также увеличивается. Человек позиционируется посредством двух вспомогательных осей таким образом, что вектор основного ускорения имеет то же направление, что и вертикальная ось тела человека. Эффект поддерживается оптическими сенсорными воздействиями, которые подают человеку посредством областей воспроизведения изображения. Когда угловая скорость увеличивается, увеличивается радиальное ускорение, причем направление результирующего основного ускорения, однако, также таким образом изменяется. Поскольку это отклонение направления основного ускорения от вертикальной оси тела будет восприниматься человеком как боковая сила, положение человека также адаптировано посредством поворота вокруг вспомогательных осей. Ускорение в тангенциальном направлении за счет увеличения угловой скорости также может быть компенсировано за счет изменения положения человека. Отклонения и изменения в направлении основного ускорения, которые возникают при изменении угловой скорости основного плеча, т.е. в процессе вращения вокруг главной оси, называют первичными силами, порождающими ошибку. Последние компенсируют за счет вращения, позиционирования и/или позиционного изменения человека.
Недостатком известного уровня техники является то, что в дальнейшем вторичные силы, порождающие ошибку, возникают из-за компенсации первичных сил, порождающих ошибку. Например, чрезмерно быстрое вращение человека вокруг вспомогательной оси может быть ощутимо человеком. Это сенсорное воздействие, однако, находится в противоречии с визуально представленными изображениями и последовательностью моделируемого движения. Это приводит к неверному толкованию мозгом и, следовательно, не к моделированию, близкому к реальности.
Еще одним недостатком известного уровня техники является то, что человек при вращении вокруг главной оси испытывает вращение около оси тела в дополнение к поступательному круговому движению вокруг основной оси. Тем не менее, после короткой фазы адаптации человеческого органа равновесия это уже не воспринимается. Если человеческий орган равновесия или человека дополнительно вращают вокруг оси, которая не проходит параллельно главной оси, это генерирует изменения собственного вращения и силы собственного вращения в органе равновесия, что приводит к дальнейшим нарушениям чувственного восприятия. Действительно, чувственные восприятия могут быть улучшены посредством визуальных воздействий, близких к реальности. В случае вестибулоокулярного рефлекса, при котором происходит моргание глазами, визуальные стимулы, тем не менее, более не могут восприниматься или могут восприниматься лишь в очень ограниченной степени.
Задачей настоящего изобретения является создание способа и устройства для моделирования ускорений для человека, которые улучшат качество моделирования. Кроме того, задачей настоящего изобретения является уменьшение вторичных сил, порождающих ошибку. Еще одной задачей настоящего изобретения является предотвращение неверного толкования мозгом человека, в частности улучшения совокупности оптических и физических сенсорных воздействий, и преодоление недостатков уровня техники.
Задачи в соответствии с настоящим изобретением решаются за счет того, что вторичные силы, порождающие ошибку, уменьшают посредством вращения и позиционирования человека вокруг трех вспомогательных осей. Кроме того, задачи в соответствии с настоящим изобретением решаются за счет того, что второй опорный элемент расположен с возможностью вращения вокруг третьей вспомогательной оси на устройстве движения для того, чтобы компенсировать или уменьшить вторичные силы, порождающие ошибку.
Дополнительными предпочтительными признаками является то, что первичные силы, порождающие ошибку, увеличивают, чтобы уменьшить вторичные силы, порождающие ошибку; что в целях уменьшения первичных сил, порождающих ошибку, и/или вторичных сил, порождающих ошибку, в плоскости равновесия первичные силы, порождающие ошибку, и/или вторичные силы, порождающие ошибку, увеличивают в дополнительной плоскости равновесия; что угловые скорости, вызванные вторичными силами, порождающими ошибку, находятся ниже или в области порога раздражения человека; что угловые ускорения, вызванные первичными силами, порождающими ошибку, и угловые ускорения, вызванные вторичными силами, порождающими ошибку, находятся ниже или в области порога раздражения человека; что первичные силы, порождающие ошибку, силы основного ускорения, порождающие ошибку, и/или силы Кориолиса, порождающие ошибку, и вторичные силы, порождающие ошибку, включают в себя ошибки собственного вращения и/или вращательные инерционные силы; и/или что угловое ускорение и/или градиент углового ускорения вращения человека вокруг вспомогательных осей ограничен и/или ослаблен для того, чтобы уменьшить вращательные инерционные силы.
В соответствии с настоящим изобретением может быть предусмотрена такая ситуация, в которой человека вращают вокруг главной оси и вокруг вспомогательных осей так, что угловое ускорение каждого полукружного канала в соответствующей плоскости равновесия находится ниже порога раздражения человека, причем порог раздражения составляет от 0.8°/с2 до 5°/с2, предпочтительно от 1°/с2 до 3°/с2, так что, для того чтобы моделировать изменяющееся ускорение вдоль оси тела человека, человека вращают с постоянной первой угловой скоростью вокруг главной оси, при которой направление первого основного ускорения образует первый угол по отношению к направлению ускорения свободного падения, затем человека ускоряют или замедляют до второй угловой скорости, при которой направление второго основного ускорения образует второй угол по отношению к направлению ускорения свободного падения, а третью ось равновесия человека поворачивают в, или она проходит в направлении, отклоненном от тангенциальной плоскости. В соответствии с дополнительными признаками способа может быть предусмотрена такая ситуация, в которой для моделирования изменяющегося ускорения вдоль оси тела человека, человека вращают с постоянной первой угловой скоростью вокруг главной оси, при которой направление первого основного ускорения образует первый угол по отношению к направлению ускорения свободного падения, затем человека ускоряют или замедляют до второй угловой скорости, при которой направление второго основного ускорения образует второй угол по отношению к направлению ускорения свободного падения, третью ось равновесия человека поворачивают в, или она проходит в направлении, отклоненном от тангенциальной плоскости, а ось тела человека поворачивают в промежуточное положение между направлением первого основного ускорения и направлением второго основного ускорения и/или в область первого основного ускорения или в область второго основного ускорения, и/или третья ось равновесия человека с постоянной угловой скоростью лежит, по существу, в радиальной плоскости.
В соответствии с дополнительными признаками способа может быть предусмотрена такая ситуация, в которой третья ось равновесия человека с постоянной угловой скоростью лежит, по существу, в плоскости между тангенциальной плоскостью и радиальной плоскостью, положение третьей оси равновесия человека между тангенциальной плоскостью и радиальной плоскостью контролируют или активно регулируют посредством вращения человека вокруг трех вспомогательных осей, положение оси тела человека между тангенциальной плоскостью и радиальной плоскостью контролируют или активно регулируют посредством вращения человека вокруг трех вспомогательных осей, и/или вращение осей тела и осей равновесия изменяют или позиционируют посредством изменения положения человека вокруг вспомогательных осей.
Кроме того, настоящее изобретение отличается тем, что вторая вспомогательная ось и третья вспомогательная ось расположены, по существу, ортогонально друг к другу так, что, по меньшей мере, один блок управления предназначен для контроля и/или активного регулирования приводов для перемещения опорных элементов и устройства движения, и/или что движение приводов опорных элементов вокруг вспомогательных осей контролируется и/или активно регулируется блоком управления, и что движение находятся ниже или в области порога раздражения человека. Дополнительные предпочтительные признаки заключаются в том, что движение приводов вспомогательных осей контролируется блоком управления, причем угловые ускорения движения находятся ниже порога раздражения человека, в том, что устройство оборудовано для выполнения способа в соответствии с настоящим изобретением и/или в том, что устройство движения выполнено в качестве одноплечевой центрифуги, центрифуги с тележкой с возможностью перемещения, центрифуги с тележкой с возможностью перемещения и вертикальной качки, двухплечевой центрифуги с тележкой с возможностью перемещения с обеих сторон, двухплечевой центрифуги с тележкой с возможностью перемещения и вертикальной качки с обеих сторон, или роботизированного плеча с, по меньшей мере, одной вращательной и/или поступательной степенью свободы.
В целях повышения ясности некоторые основные термины определены ниже.
Человек имеет два органа равновесия, которые расположены в области головы. Каждый орган равновесия содержит три полукружных канала, в которых относительные скорости вязкой жидкости могут быть определены посредством сенсорных клеток. Три полукружных канала каждого органа равновесия находятся, по существу, в трех плоскостях равновесия. Первая плоскость равновесия, вторая плоскость равновесия и третья плоскость равновесия, по существу, ортогональные друг к другу, и они расположены так, что они могут попарно обнаружать движения вокруг осей равновесия человека. Первая ось равновесия проходит, по существу, вдоль субъективной вертикальной оси человека, вторая ось равновесия, по существу, соответствует линии, проходящей параллельно соединяющей линии между двумя ушами человека или двумя глазами, и третья ось равновесия, по существу, соответствует линии, проходящей параллельно направлению взгляда неподвижного вида, ориентированного прямо перед собой. Эти три оси равновесия, по существу, ортогональны друг другу. Первая ось равновесия соответствует, например, оси рыскания, вторая ось равновесия - оси тангажа, а третья ось - оси крена. Эти три оси пересекаются в области головы человека, предпочтительно в плоскости симметрии тела, в области между ушами человека и в области его сердца.
Кроме того, датчики ускорения для определения линейных ускорений предоставляются в человеческом органе равновесия. Один из таких датчиков ускорения определяет вертикальные ускорения, а два других определяют горизонтальные ускорения.
Человеческий орган равновесия воспринимает изменения в ускорениях, а также изменения в положении и положение тела с высокой точностью. Тем не менее, существуют определенные пороги раздражения, ниже которых ускорения и изменения в положении не воспринимаются. Эти пороги раздражения зависят, с одной стороны, от чувствительности, связанной с человеком, и, с другой стороны, на них могут оказывать влияния окружающие влияния, такие как, например, визуальные стимулы. Если человек подвергнут, например, большому стрессу и четкому визуальному стимулу, такому как, например, экран горизонта, порог раздражения находится значительно выше, чем в неподвижных окрестностях без визуальных стимулов.
Кроме того, порог раздражения находится не на одной и той же высоте для всех последовательностей движений или ускорений. Таким образом, например, неправильные положения человека воспринимаются с меньшей интенсивностью во второй плоскости равновесия, чем неправильные положения человека в третьей плоскости равновесия.
Фактор времени также играет роль в определении порога раздражения. Орган равновесия, таким образом, адаптируется к постоянному умеренному основному ускорению, которое отклоняется от ускорения свободного падения, и после фазы адаптации от приблизительно двадцати секунд до минуты не воспринимается или воспринимается в качестве только слегка приподнятого.
Например, порог раздражения для среднестатистического человека находится приблизительно на одном градусу в секунду в квадрате, то есть 1°/с2. Для более устойчивых людей либо из-за влияния субъективного восприятия порог раздражения может составлять до 2°/с2 или 3°/с2. В крайних случаях порог раздражения может даже составить 5°/с2, что означает, что человек не воспринимает движение как таковое, пока угловое ускорение составляет 5°/с2. Порог раздражения углового ускорения на полукружный канал может соответственно составлять от 1°/с2 до 5°/с2. В частности, эти величины применяются к угловым ускорениям органов равновесия, к угловым ускорениям вокруг вектора нормали плоскости равновесия, которая находится в области органа равновесия, к угловым ускорениям полукружных каналов вследствие ошибок собственного вращения и/или к угловым ускорениям вследствие вращений человека вокруг центра, который находится в районе головы человека. Силы, порождающие ошибку, которые находятся ниже порога раздражения человека, следовательно, являются силами, порождающими ошибку, которые оказывают на орган равновесия вращательное ускорение, которое находится ниже порога раздражения человека.
Позиционирование человека происходит посредством вспомогательных осей. В соответствии с настоящим изобретением предоставлены, по меньшей мере, две, предпочтительно три вспомогательные оси. Вспомогательные оси соответствуют, по существу, осям, вокруг которых устройство фиксации для человека расположено с возможностью вращения. Они проходят через центр, который размещен на расстоянии от главной оси в области человека.
Устройство фиксации, на котором человек закреплен, жестко соединено с первым опорным элементом. Первый опорный элемент расположен с возможностью вращения вокруг первой вспомогательной оси на втором опорном элементе. Второй опорный элемент, в свою очередь, расположен с возможностью вращения вокруг второй вспомогательной оси на третьем опорном элементе, причем первая и вторая вспомогательные оси, по существу, ортогональны друг другу. Третий опорный элемент предоставлен с возможностью вращения вокруг третьей вспомогательной оси на устройстве движения. Вторая вспомогательная ось и третья вспомогательная ось также, по существу, ортогональны друг другу. Устройство, используемое для генерации основного ускорения, т.е. для перемещения человека вокруг главной оси, упоминается как устройство движения. Оно может быть выполнено, например, в качестве одноплечевой центрифуги, многоплечевой центрифуги, двухплечевой центрифуги с тележкой с возможностью перемещения и т.д.
Вращение человека вокруг вспомогательных осей происходит посредством приводов опорных элементов. Приводы обеспечивают возможность вращения вокруг вспомогательных осей и контролируются и/или активно регулируются посредством блока управления. Это вращение устройства движения вокруг главной оси с помощью главного привода также можно контролировать и/или активно регулировать посредством блока управления.
Движения вокруг вспомогательных осей и главной оси предпочтительно приводятся в действие посредством приводов, контролируемых и/или активно регулируемых. Основное ускорение имеет значение и направление, величину ускорения, обозначенную как значение.
Оси вращения обеспечивают возможность вращения человека вокруг, по меньшей мере, двух, предпочтительно трех осей вращения и, таким образом, содержать две или три степени свободы вращения. Эти оси могут совпадать с осями равновесия человека. В некоторых случаях, однако, также может быть желательно, чтобы эти оси не совпадали с осями равновесия человека.
Термин сила, порождающая ошибку, первичных и вторичных сил, порождающих ошибку, относится не только к силам, но и к инерциям собственного вращения, ускорениям, вращательным ускорениям, линейным ускорениям, угловым ускорениям и т.д. В принципе, эти ошибочные восприятия являются силами, порождающими ошибку, которые действуют на сенсорные клетки человеческого органа равновесия и, следовательно, называются силами, порождающими ошибку, для повышения ясности.
Плоскость в области человека, в которой находится главная ось, определяется как радиальная плоскость. Плоскость в области человека, в которой находится касательная орбиты человека вокруг главной оси и прямой линии, параллельной главной оси, определяется как тангенциальная плоскость. Тангенциальная плоскость и радиальная плоскость, следовательно, примерно ортогональны друг другу и имеют пересекающую прямую линию, которая проходит параллельно главной оси и находится в области человека.
Произвольная прямая линия, которая проходит через тело человека и которая расположена неподвижно относительно человека, определяется как ось тела человека. Оси равновесия человека являются, например, осями тела.
Положение человека и положение человека по отношению к направлению основного ускорения определяются по отношению к системе координат совместного вращения.
Способ в соответствии с настоящим изобретением и устройство в соответствии с настоящим изобретением описаны ниже с помощью чертежей.
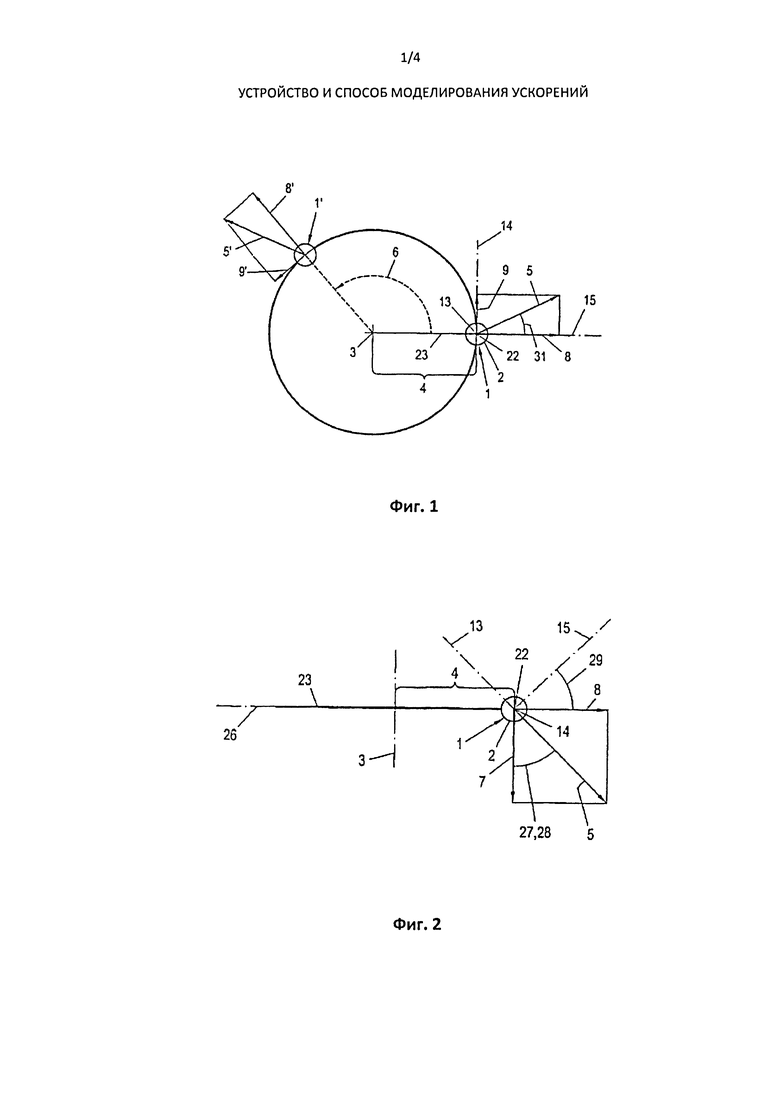
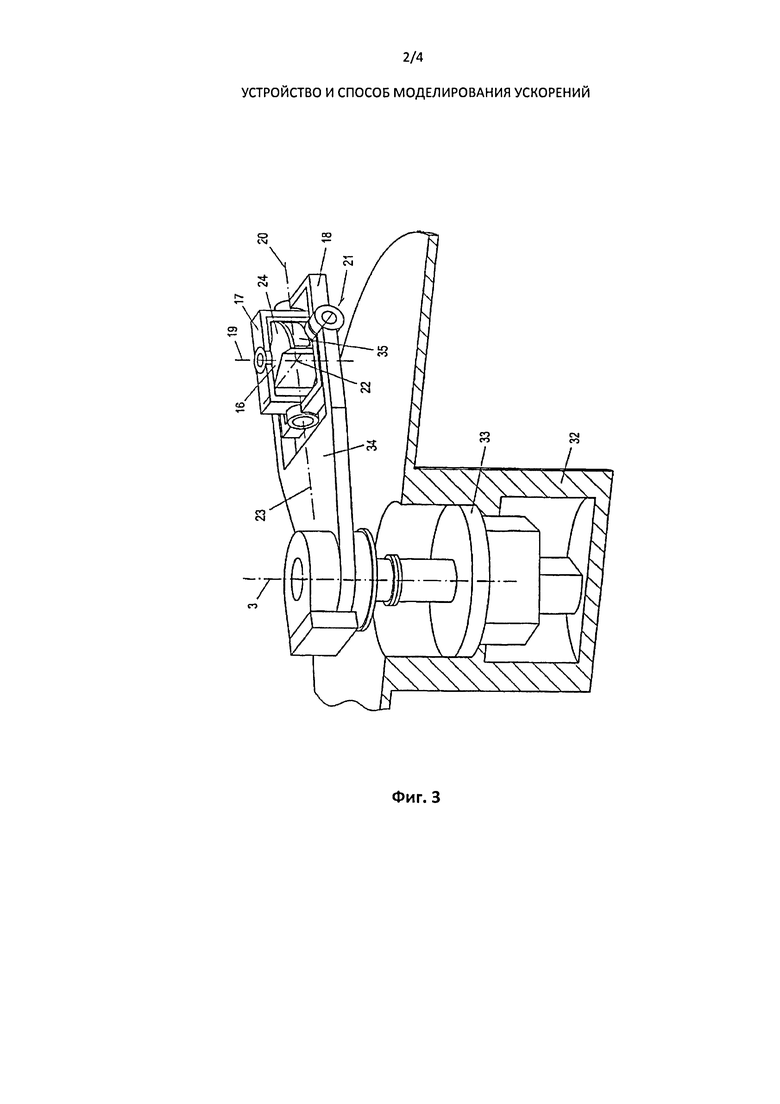
Фигура 1 представляет собой схематический вид кинематики.
Фигура 2 представляет собой тот же кинематический механизм, что и на Фиг. 1, но вид сбоку.
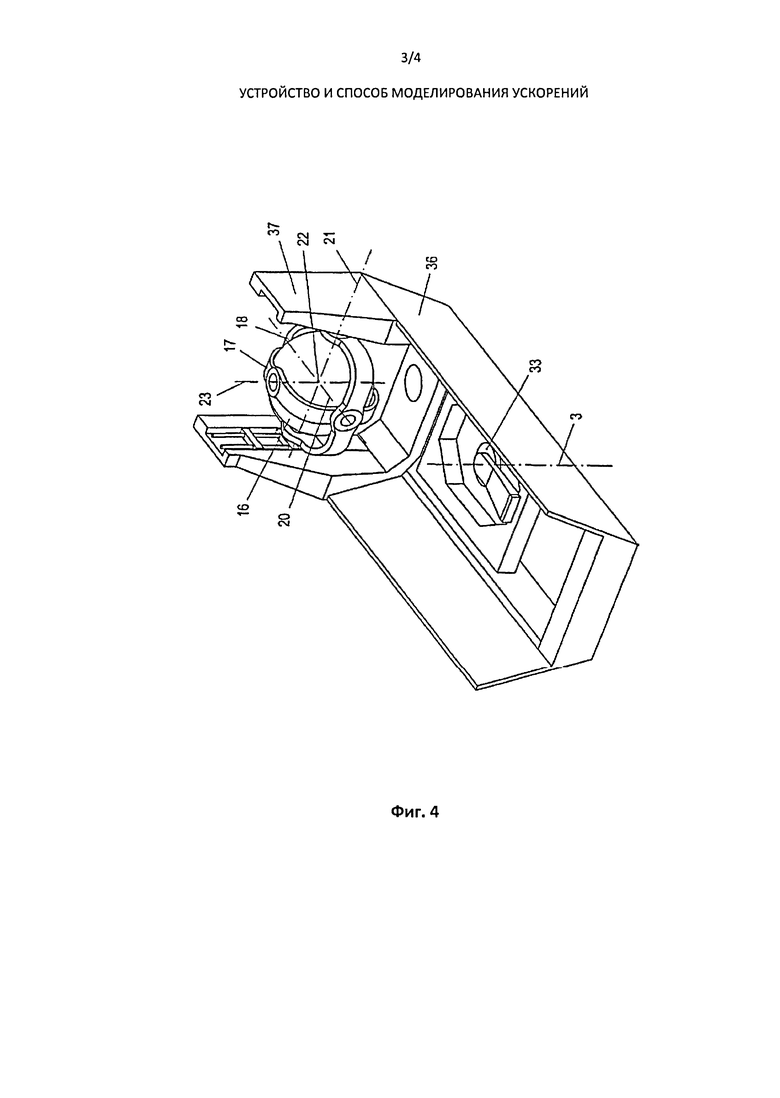
Фигура 3 представляет собой устройство в соответствии с настоящим изобретением.
Фигура 4 представляет собой дополнительный вариант осуществления устройства в соответствии с настоящим изобретением.
Фигура 5 представляет собой схематический вид сверху для описания кинематических соотношений с изменяющимися угловыми скоростями.
Фигура 6 представляет собой тот же кинематический механизм, что и на Фиг. 5, но вид сбоку.
В целях упрощения представления представленные векторы ускорений соответствуют силам ускорения, действующим на человека. Ориентация силы ускорения противоположна соответствующему ускорению. Векторы ускорения, таким образом, соответствуют противоположно направленным силам ускорения, вызванным ускорениями.
Фиг. 1 представляет собой схематический вид кинематики для рассмотрения способа в соответствии с изобретением и устройства в соответствии с изобретением. Плоскость представления соответствует горизонтальной плоскости, а направление силы под действием силы тяжести изображено в проекции. Человека 1 поворачивают вокруг главной оси 3 на расстоянии 4. В первую очередь, предполагается, что человек 1, в частности голова 2 человека, жестко соединена с устройством 23 движения. Это означает, что человек 1 при повороте вокруг главной оси 3 также испытывает поворот вокруг оси тела человека, которая проходит параллельно главной оси 3 человека. Когда человека поворачивают вокруг главной оси 3 на угол 6, человек испытывает поворот вокруг оси тела, параллельной главной оси 3, на тот же угол в том же направлении. В результате поворота человека 1 на расстоянии 4 относительно главной оси 3, по меньшей мере, одно радиальное ускорение 8 действует на человека 1. Кроме того, в случае неравномерной угловой скорости вокруг основной оси 3 имеет место тангенциальное ускорение 9. Направление тангенциального ускорения проходит по касательной к кривой движения человека. Ориентация тангенциального ускорения зависит от того, соответствует ли изменение угловой скорости ускорению или замедлению.
Основное ускорение 5, действующее на человека в главной плоскости 26 вращения, соответствует векторному сложению радиального ускорения и тангенциального ускорения. В зависимости от положения человека определяются первая плоскость 10 равновесия, вторая плоскость 11 равновесия и третья плоскость 12 равновесия, так же как и первая ось 13 равновесия, вторая ось 14 равновесия и третья ось 15 равновесия.
Кроме того, показано второе положение человека 1′, в котором действуют основное ускорение 5′, радиальное ускорение 8′ и тангенциальное ускорение 9′.
Фиг. 2 представляет собой тот же кинематический механизм, что и на Фиг. 1, но вид сбоку, так что главная плоскость 26 вращения изображена в проекции, а главная ось 3 лежит в плоскости чертежа. Человека 1 снова вращают вокруг главной оси 3 на расстоянии 4. Согласно устройству в соответствии с настоящим изобретением это вращение происходит, по существу, посредством устройства 23 движения. Радиальное ускорение 8, так же как и ускорение 7 свободного падения, действуют в плоскости представления на человека 1, в частности на голову 2 человека. Радиальное ускорение зависит от расстояния 4 и угловой скорости вращения человека 1 вокруг главной оси. Ускорение свободного падения можно считать постоянным, когда система находится в покое. Результирующее основное ускорение 5 в рассматриваемой радиальной плоскости возникает за счет векторного сложения радиального ускорения 8 и ускорения 7 свободного падения. Таким образом, радиальное ускорение 8 меняется тогда, когда происходит изменение угловой скорости или расстояния 4. Так как ускорение 7 свободного падения считается постоянным, величина и направление основного ускорения 5 изменяется тогда, когда происходит изменение в радиальном ускорении. В общем, основное ускорение 5, таким образом, зависит от, по меньшей мере, радиального ускорения 8, тангенциального ускорения 9 и ускорения 7 свободного падения. В настоящем представлении положение человека 1 выбирают так, чтобы первая ось 13 равновесия совпадала с направлением основного ускорения 5. Таким образом, основное ускорение действует по оси рыскания и субъективно воспринимается как вертикальное ускорение, причем тангенциальное ускорение изначально не предполагалось присутствующим.
Если величина основного ускорения 5 изменяется, но положение человека 1 по отношению к изменяющемуся направлению изменяющегося основного ускорения 5 остается неизменным, то положение человека 1 должно быть адаптировано к направлению основного ускорения 5. Если эта адаптация не проводится, человек 1 испытывает первичную силу, порождающую ошибку. Это связано с тем, что, когда величина основного ускорения 5 изменяется, направление основного ускорения также изменяется. Адаптация положения человека 1, а точнее головы 2 человека 1, происходит за счет вращения человека вокруг, по меньшей мере, одной из вспомогательных осей 19, 20, 21.
Посредством вращения человека, например, вокруг второй оси 14 равновесия положение полукружных каналов человека 1 изменяется по отношению к главной плоскости 26 вращения. Как было упомянуто, человека и, следовательно, также и органы равновесия человека вращают, при наличии вращения вокруг главной оси 3, также вокруг оси тела человека, которая проходит параллельно главной оси. Однако после короткой фазы адаптации это вращение вокруг оси тела больше не воспринимается человеком 1, так как скорость жидкости адаптируется к движению полукружных каналов в результате влияния трения и вязкости. Таким образом, жидкость находится в покое по отношению к полукружным каналам, так что никакое вращение не может быть воспринято. Если положение плоскостей 10, 11, 12 равновесия изменяется по отношению к главной оси 3 или по отношению к главной плоскости 26 вращения, то эффект такого изменения заключается в том, что различные полукружные каналы становятся наклонными в направлении к главной плоскости 26 вращения или от главной плоскости вращения. В результате наклона возникают угловое ускорение, связанное с собственным вращением, и относительное перемещение жидкости в полукружных каналах, что ошибочно воспринимается человеком как движение. Этот эффект является причиной вторичных сил, порождающих ошибку, и упоминается как ошибка собственного вращения. Несмотря на то что человек, возможно, выполняет лишь небольшие передвижения вокруг третьей оси равновесия, т.е. оси крена, это может быть интерпретировано органами равновесия как вращение вокруг, по меньшей мере, одного из двух оставшихся осей равновесия. Этот сенсорный стимул, то есть ошибка собственного вращения, при некоторых обстоятельствах может инициировать вестибулоокулярый рефлекс. Даже если окружение, подлежащее моделированию, подкрепляется четкими визуальными изображениями на экране, которые предназначены для того, чтобы прояснять сенсорное воздействие на человека 1, последний уже не в состоянии воспринимать визуальное сенсорное воздействие после появления рефлекса моргания глаз. Нежелательная дезориентация человека является результатом. В зависимости от порога раздражения человека вторичные силы, порождающие ошибку, и/или ошибки собственного вращения воспринимаются при различных величинах. Если величина вторичных сил, порождающих ошибку или ошибки собственного вращения, остается ниже порога раздражения человека, то силы, порождающие ошибку, не воспринимаются, но если величина превышает порог раздражения, она воспринимается и может инициировать вестибулоокулярный рефлекс.
Фиг. 2 дополнительно показывает первый угол 27 между направлением основного ускорения 5 и направлением ускорения 7 свободного падения. Показанные коэффициенты ускорения примерно соответствуют радиальному ускорению, которое, по существу, имеет ту же величину, что и ускорение свободного падения. Направление основного ускорения 5, в частности первый угол 27, равен, следовательно, приблизительно 45°. С ускорением свободного падения, примерно равном G, и радиальным ускорением, примерно равном G, величина основного ускорения соответствует приблизительно 1.41 раз на ускорение свободного падения, т.е. 1.41G. Если угловая скорость человека 1 вокруг главной оси 3 увеличивается, радиальное ускорение 8 увеличивается. Угол направления основного ускорения по отношению к направлению ускорения 7 свободного падения также увеличивается. Радиальное ускорение уменьшается с уменьшением угловой скорости. В этом случае угол уменьшается.
В частности, фиг. 1 представляет собой ситуацию, в которой человек 1 замедляется от первой угловой скорости ко второй угловой скорости. Помимо ускорения свободного падения, которое изображено в проекции на представлении фиг. 1, возникают также и радиальное ускорение 8, и тангенциальное ускорение 9. Результирующее основное ускорение 5 имеет тангенциальный угол 31. Величина тангенциального угла 31, по существу, равна нулю при постоянной угловой скорости.
Угловое замедление, представленное на фиг. 1, оказывает влияние на направление основного ускорения 5, действующего на человека 1. Например, человек может быть расположен с направлением взгляда наружу, то есть третья ось равновесия человека или направление взгляда человека нацелено в направлении, которое направлено в сторону от главной оси 3, но не обязательно проходит в радиальном направлении наружу. Если величина основного ускорения 5, действующего на человека, изменилась, а направление, в котором основное ускорение действует на человека, не изменилось, возможно, например, человека вращают вокруг оси тела, которая проходит параллельно главной оси 3. В механизме, представленном на фиг. 1, человек, смотрящий в радиальном направлении наружу, при представленном тангенциальном ускорении 9 должен был бы вращаться под тангенциальным углом 31 для того, чтобы компенсировать тангенциальное ускорение 9.
Фиг. 3 представляет собой устройство в соответствии с настоящим изобретением, причем устройство 23 движения выполнено в качестве одноплечевой центрифуги. Последнее содержит главное плечо 34, которое приводится в движение посредством главного привода 33, установленного в основании 32. Главное плечо 34 может вращаться вокруг главной оси 3. Третий опорный элемент 18, выполненный с возможностью вращения вокруг третьей вспомогательной оси 21, расположен на некотором расстоянии от главной оси 3 на главном плече. Второй опорный элемент 17 расположен с возможностью вращения вокруг второй вспомогательной оси 20 на третьем опорном элементе. Вторая и третья вспомогательные оси являются, по существу, ортогональными друг другу, и они пересекаются в центре 22. Первый опорный элемент 16 расположен с возможностью вращения вокруг первой вспомогательной оси 19 на втором опорном элементе. Первая и вторая вспомогательные оси также являются, по существу, ортогональными друг к другу, и они пересекаются в центре 22. В следующих вариантах осуществления первый опорный элемент 16 выполнен в качестве части кабины 24. Устройство фиксации для человека 1 предоставлено в кабине 24. Устройство фиксации предпочтительно выполнено в качестве сиденья. Более того, кабина внутри содержит область 35 воспроизведения изображения, которая представлена схематически в виде изогнутой прямоугольной области. Это схематическое представление. Область воспроизведения изображения предоставлена на внутренней стороне кабины и, следовательно, обычно не может быть видна снаружи. Человек, который в следующем варианте осуществления жестко соединен с кабиной 24, может быть перемещен с возможностью вращения с тремя степенями свободы с помощью первой вспомогательной оси 19, второй вспомогательной оси 20 и третьей вспомогательной оси 21. Путем предоставления третьей степени свободы вторичные силы, порождающие ошибку, могут быть, по меньшей мере, частично скомпенсированы и/или уменьшены. Третья степень свободы соответствует, например, вращению вокруг оси тела, которая проходит параллельно главной оси 3 и соответствует вращению вокруг первой оси равновесия человека.
Вращение человека вокруг вспомогательных осей 19, 20, 21 происходит посредством приводов опорных элементов 16, 17, 18. Приводы запускают вращения вокруг вспомогательных осей и контролируются и/или активно регулируются посредством блока управления. Вращение устройства движения вокруг главной оси 3 посредством главного привода 33 также может контролироваться и/или активно регулироваться посредством блока управления. Более того, человек может влиять на контроль с помощью средства ввода параметров, в частности может управлять моделируемым объектом в виртуальном мире.
Фиг. 4 представляет собой дополнительный вариант осуществления устройства движения в соответствии с изобретением. Корзина 36 тележки установлена с возможностью вращения вокруг главной оси 3, которая может быть приведена в движение посредством главного привода 33. Тележка 37 с возможностью вертикальной качки предоставлена продольно с возможностью перемещения в корзине 36 тележки. Третий опорный элемент 18, в свою очередь, предоставлен на тележке 37 с возможностью вертикальной качки, причем упомянутый третий опорный элемент выполнен с возможностью вращения вокруг третьей вспомогательной оси 21. Второй опорный элемент 17 предусмотрен таким образом, чтобы иметь возможность вращаться вокруг второй вспомогательной оси 20 на третьем опорном элементе 18. Первый опорный элемент 16 предусмотрен таким образом, чтобы иметь возможность вращаться вокруг первой вспомогательной оси на втором опорном элементе 17. Человек 1 присоединен посредством крепежного устройства к упомянутому первому опорному элементу. В дополнение к трем вспомогательным осям человека можно перемещать поступательно вдоль оси вертикальной качки, проходящей параллельно главной оси 3. Посредством переносного механизма на тележке 37 с возможностью вертикальной качки на корзине 36 тележки, расстояние 4 от человека и от центра 22 до главной оси 3 может быть изменено. Изменение радиального ускорения, таким образом, также возможно посредством изменения расстояния человека от главной оси 3, в дополнение к изменению посредством угловой скорости. Устройство фиксации для человека 1 снова имеет три степени свободы. В дополнение к трем степеням свободы человека можно перемещать поступательно вдоль направления, параллельного главной оси 3, и вдоль корзины 36 тележки. Вместе с вращением вокруг главной оси 3 кинематический механизм согласно фиг. 4, таким образом, предлагает шесть степеней свободы.
Различные последовательности движения могут быть предложены для компенсации и/или уменьшения вторичных сил, порождающих ошибку, в моделировании.
Фиг. 5 представляет собой схематический вид для описания кинематических соотношений с изменяющимися угловыми скоростями. Человека 1 вращают на расстоянии 4 вокруг главной оси 3, причем угловую скорость регулируют для генерирования различных основных ускорений. Например, для моделирования изменения скорости или криволинейного полета воздушного судна человек может быть загружен первоначально с первым основным ускорением 38, а затем со вторым основным ускорением 39. С этой целью угловое ускорение увеличивают от первого углового ускорения до второго углового ускорения. В начале моделирования устройство 23 движения вращает человека 1 с постоянной первой угловой скоростью. Результирующее первое основное ускорение 38 действует на человека в радиальной плоскости. Если угловая скорость увеличивается, тангенциальное ускорение 9 также действует на человека в дополнение к радиальному ускорению. Это приводит к изменению в направлении основного ускорения и проходит, например, в схематическом представлении вдоль вектора 40 ускорения. Когда достигнута вторая угловая скорость, человека равномерно вращают вокруг главной оси 3 со второй угловой скоростью. Тангенциальное ускорение снова равно нулю, а второе основное ускорение 39 действует на человека, причем упомянутое второе основное ускорение больше в случае увеличения угловой скорости, чем величина первого основного ускорения 38.
Тангенциальное ускорение 9′ и вектор результирующего ускорения 40′ действуют тогда, когда происходит уменьшение угловой скорости.
Фиг. 6 представляет собой тот же кинематический механизм человека 1, которого вращают вокруг главной оси 3 вращения. Человека вновь ускоряют от первой угловой скорости до второй угловой скорости. Первое основное ускорение 38 действует при равномерном движении человека с первой угловой скоростью. Если человек перемещается вокруг главной оси 3 со второй угловой скоростью, причем вторая угловая скорость больше, чем первая угловая скорость, то на человека действует второе основное ускорение 39. Величина второго основного ускорения 39 больше, чем величина первого основного ускорения 38. Положение человека 1 может быть изменено для того, чтобы скомпенсировать изменение в направлении основного ускорения при изменении величины. Движение вокруг вспомогательных осей 19, 20, 21 предусмотрено для изменения положения человека.
В качестве примера способа моделирования ускорений человека проводят от первого основного ускорения до второго основного ускорения. В первом примере основное ускорение предназначено для того, чтобы действовать вдоль оси тела человека или вдоль первой оси 13 равновесия человека. На первом этапе человека непрерывно вращают с первой угловой скоростью вокруг главной оси 3. Первое основное ускорение 38 действует на человека. Для того чтобы направление ускорения совпало с первой осью 13 равновесия, положение человека изменяют посредством вращения вокруг вспомогательных осей. Например, положение человека может быть ориентировано таким образом, чтобы первая ось 13 равновесия совпадала с вектором первого основного ускорения 38, с вектором второго основного ускорения 39 или промежуточным положением 41 между векторами. Третья ось 15 равновесия человека 1, по существу, направлена наружу. С постоянной угловой скоростью, следовательно, она, по существу, придерживается радиальной плоскости основного ускорения. Когда человека ускоряют от первой угловой скорости до второй угловой скорости, человек отклоняется в обратном направлении вокруг второй оси 14 равновесия для того, чтобы адаптироваться к положению человека. Тем не менее, этот наклон происходит таким образом, что движение, в частности, вторичные силы, порождающие ошибку, возникающие при движении, находятся в области или ниже порога раздражения человека. Компенсация первичных сил, порождающих ошибку, также происходит до такой степени, что силы, порождающие ошибку, находятся в области или ниже порога раздражения человека. Это может быть достигнуто, например, тем, что человека не перемещают вокруг второй оси равновесия во время ускорения от первой угловой скорости до второй угловой скорости. Первая ось 13 равновесия расположена проходящей вдоль промежуточного положения 41. Человек ощущает небольшой наклон в обратном направлении, когда упомянутого человека вращают с первой угловой скоростью. В случае второй угловой скорости подается небольшой наклон вперед. Тем не менее, это ощущение настолько мало по сравнению с другими действующими силами, что оно находится в области или ниже порога раздражения человека. Таким образом, это компенсирует тот эффект, что в результате наклона человека в окружности оси, которая не параллельна главной оси 3, собственный момент вращение главного вращения передается разным полукружным каналам. Ошибка собственного вращения, таким образом, полностью компенсируется за счет фиксированного позиционирования первой оси 13 равновесия вокруг второй оси 14 равновесия. Вторичные ошибки, возникающие таким образом, незначительны и/или находятся ниже или в области порога раздражения.
Еще одна возможность для позиционирования человека с увеличивающимся ускорением и увеличивающейся угловой скоростью является ориентация третьей оси равновесия вдоль оси 15′. Компонент направления взгляда человека в главной плоскости вращения направлен наружу вдоль оси 15′ под определенным углом между тангенциальным и радиальным направлением. Угол, например, может быть повернут между 30° и 60° или 45° или от радиального направления по направлению к тангенциальному направлению. Чтобы смоделировать ускорение вдоль первой оси 13 равновесия, данная ось выполнена совпадающей с основным ускорением 5. Позиционное изменение снова происходит посредством вращения человека вокруг вспомогательных осей 19, 20, 21. При увеличении угловой скорости от первой угловой скорости до второй угловой скорости положение человека адаптируется для того, чтобы компенсировать первичные силы, порождающие ошибку. Первая ось равновесия адаптируется для того, чтобы изменять основное ускорение 38, 39 с этой же целью. Благодаря наклонному положению человека на угол вдоль оси 15′ ошибка собственного вращения разделяется на несколько, по меньшей мере, две, а предпочтительно три плоскости равновесия или полукружных канала. Результатом этого является то, что движение человека вокруг оси, которая не проходит параллельно главной оси 3, лежит в области или ниже порога раздражения человека. В одном из вариантов осуществления способа в соответствии с изобретением предусмотрено то, что, например, порог раздражения упал ниже во всех плоскостях равновесия или полукружных каналах человека. Для этой цели первичные силы, порождающие ошибку, и/или вторичные силы, порождающие ошибку, могут увеличиться в одной равновесной плоскости или полукружном канале для того, чтобы сохранить первичные силы, порождающие ошибку, и/или вторичные силы, порождающие ошибку, в другой плоскости равновесия или другом полукружном канале в области или ниже порога раздражения.
Еще одна возможность для позиционирования человека заключается в том, что человека вращают с направлением взгляда внутрь.
И в этот раз основное ускорение 5 должно действовать вдоль оси тела, например вдоль первой оси 13 равновесия человека 1. При первой угловой скорости третья ось 15 равновесия человека направлена, по существу, внутрь и наклонена вниз. Первая ось 13 равновесия, по существу, ортогональна третьей оси 15 равновесия, т.е. она наклонена наружу и проходит вдоль направления основного ускорения. Таким образом, для человека возникает субъективное восприятие ускорения в направлении оси тела. Если человека ускоряют от первой угловой скорости до второй угловой скорости, то изменение в направлении основного ускорения 5, как и в предыдущих примерах, может быть скомпенсировано за счет вращения вокруг человека вокруг вспомогательных осей. Однако это в некоторой степени является тем, что угловые ускорения, в частности, первичные и вторичные силы, порождающие ошибку, лежат в области или ниже порога раздражения человека. Для того чтобы уменьшить ошибку собственного вращения, первая ось равновесия человека может быть расположена в промежуточном положении между вектором первого основного ускорения 38 и вектором второго основного ускорения 39.
Еще одним применением способа в соответствии с настоящим изобретением является замедление от первой угловой скорости до второй угловой скорости, причем вторая угловая скорость меньше, чем первая угловая скорость. Особенно в случае уменьшения основного ускорения 5 человек 1 субъективно воспринимает ошибки собственного вращения более интенсивно. Человека позиционируют, например, с видом наружу, причем первая ось 13 равновесия снова соответствует, по существу, направлению основного ускорения. Для того чтобы скомпенсировать первичные силы, порождающие ошибку, третья ось равновесия может быть совмещенной с изменением в направлении основного ускорения 5, в частности первого основного ускорения 38 и второго основного ускорения 39. Для дополнительной компенсации в соответствии с изобретением первая ось равновесия человека может быть расположена в промежуточном положении 41 между направлением первого основного ускорения 38 и второго основного ускорения 39. Компенсация изменения в направлении основного ускорения в радиальной плоскости, таким образом, не проводится. Ошибка собственного вращения, таким образом, уменьшается, как это было описано в предыдущих примерах. Уменьшение ошибки собственного вращения приводит к увеличению первичных сил, порождающих ошибку, но предпочтительно ниже или в области порога раздражения человека.
Еще один вариант осуществления способа в соответствии с изобретением характеризуется тем, что человека вращают вокруг главной оси 3 с некоторой угловой скоростью. Направление, по которому основное ускорение действует на человека, определяется посредством вращения и позиционирования человека вокруг вспомогательных осей. В соответствии с вариантом осуществления человека ускоряют вокруг главной оси от первой угловой скорости до второй угловой скорости, причем величина основного ускорения, таким образом, увеличивается и направление основного ускорения изменяется. Вторая угловая скорость больше, чем первая угловая скорость, в результате чего величина второго основного ускорения больше, чем величина первого основного ускорения. Угловая скорость затем уменьшается до третьей угловой скорости, которая меньше, чем вторая угловая скорость. Для этого первичные и вторичные силы, порождающие ошибку, компенсируются, частично компенсируется и/или компенсируются таким образом, что они лежат в области или ниже порога раздражения.
Согласно еще одному варианту осуществления способа в соответствии с настоящим изобретением человека изначально располагают при увеличении угловой скорости от первого угловой скорости до второй угловой скорости, по существу, тангенциально, т.е. третья ось равновесия, по существу, направляется в тангенциальном направлении или проходит в тангенциальной плоскости. После того как достигается вторая угловая скорость, человек, в частности третья ось 15 равновесия человека, направлена наружу. Этот поворот человека на определенный угол, в частности 90°, происходит таким образом, что он не воспринимается и/или находится в области или ниже порога раздражения человека. Это движение может контролироваться или активно регулироваться. Угловая скорость затем уменьшается от второй угловой скорости до третьей угловой скорости. При увеличении угловой скорости от первой угловой скорости до второй угловой скорости первичные силы, порождающие ошибку, по существу, компенсируются за счет вращения человека вокруг третьей оси равновесия и вокруг второй оси равновесия. При уменьшении угловой скорости от второй до третьей угловой скорости первичные силы, порождающие ошибку, компенсируются, в частности, за счет вращения человека вокруг первой оси равновесия и вокруг второй оси равновесия. Первичные и вторичные силы, порождающие ошибку, таким образом, компенсируются или уменьшаются, так что они находятся в области или ниже порога раздражения человека.
Согласно еще одному варианту осуществления способа в соответствии с настоящим изобретением человека изначально ориентируют в тангенциальном направлении и, чтобы увеличить первую угловую скорость до второй угловой скорости, вращают от тангенциальной ориентации третьей оси равновесия вокруг второй оси равновесия. Это вращение может активно регулироваться для того, чтобы удерживать вращение человека в области или ниже порога раздражения.
Согласно еще одному варианту осуществления человек, в частности третья ось равновесия человека, ориентируется, по существу, тангенциально. При увеличении от первой угловой скорости до второй угловой скорости первичные и вторичные силы, порождающие ошибку, компенсируются, по меньшей мере, частично за счет вращения человека вокруг вспомогательных осей. Для того чтобы уменьшить угловую скорость от второй угловой скорости до третьей угловой скорости, человек ориентирован смотрящим внутрь. Третья ось равновесия человека, таким образом, направлена внутрь в противоположность радиальной компоненте основного ускорения. Ориентирование человека не должно происходить именно радиально, но оно также может быть установлено под углом между тангенциальным и радиальным направлением или может быть перемещено активно регулируемым образом.
Согласно еще одному варианту осуществления способа в соответствии с настоящим изобретением человека замедляют со второй угловой скорости до третьей угловой скорости. Третья угловая скорость снова меньше, чем вторая угловая скорость. Человек, в частности третья ось равновесия человека, позиционируется, по существу, радиально внутрь. Ось наклонена вниз от главной плоскости 26 вращения, так что, например, основное ускорение проходит в направлении первой оси 13 равновесия человека 1.
Согласно еще одному варианту осуществления настоящего изобретения предусмотрено то, что органы равновесия человека содержат полукружные каналы, и то, что для того, чтобы уменьшить первичные силы, порождающие ошибку, и/или вторичные силы, порождающие ошибку, полукружного канала, первичные силы, порождающие ошибку, и/или вторичные силы, порождающие ошибку, дополнительного полукружного канала увеличиваются, и что вторичные силы, порождающие ошибку, находятся ниже или в области порога раздражения человека.
Устройство в соответствии с настоящим изобретением для осуществления способа характеризуется, например, тем, что вспомогательные оси проходят через центр, который расположен в области головы 2 человека 1. Человека позиционируют в кабине таким образом, что голова расположена в районе центра.
В соответствии с вариантом осуществления три оси пересекаются в области центра.
Согласно еще одному варианту осуществления, по меньшей мере, одна из вспомогательных осей имеет нормальное расстояние от других вспомогательных осей. Это расстояние может доходить, например, до расстояния между органом равновесия и глазом человека.
Согласно еще одному варианту осуществления способа предусмотрено то, что для того, чтобы смоделировать изменяющееся ускорение вдоль оси тела человека, человека
- вращают с постоянной первой угловой скоростью вокруг главной оси, на которой направление первого основного ускорения образует первый угол по отношению к направлению ускорения свободного падения,
- затем человека ускоряют или замедляют до второй угловой скорости, при которой направление второго основного ускорения образует второй угол по отношению к направлению ускорения свободного падения,
- третья ось равновесия человека поворачивается в или проходит в направлении, отклоняющемся от тангенциальной плоскости,
- и ось тела человека поворачивается в промежуточное положение между направлением первого основного ускорения и направлением второго основного ускорения и/или в область первого основного ускорения или в область второго основного ускорения,
и/или угол между осью тела и ускорением свободного падения лежит между первым углом и вторым углом.
Согласно еще одному варианту осуществления способа предусмотрено то, что третья ось равновесия человека лежит, по существу, в плоскости между тангенциальной плоскостью и радиальной плоскостью с постоянной и/или изменяющейся угловой скоростью главного привода, причем линия пересечения тангенциальной плоскости с радиальной плоскостью лежит в упомянутой плоскости.
Приводы предназначены для того, чтобы приводить в действие вращение вокруг главной оси 3, и для того, чтобы приводить в действие вращение человека 1 вокруг первой вспомогательной оси 19, вспомогательной оси 20 и/или вспомогательной оси 21. Эти приводы контролируются и/или активно регулируется. Движение человека 1, таким образом, может контролироваться и/или активно регулироваться. Регулирование может быть охарактеризовано тем, что сигналы управления передаются под контроль приводов, причем приводы для вращения человека контролируются и/или регулируются, и/или причем движение человека находится ниже порога раздражения человека.
Согласно некоторому варианту осуществления способа в соответствии с настоящим изобретением человека проводят от первой угловой скорости до второй угловой скорости, причем первое основное ускорение, равное приблизительно 3G, действует при первой угловой скорости, а второе основное ускорение, равное приблизительно 1.4G, действует при второй угловой скорости. Человек 1 расположен таким образом, что третья ось равновесия направлена наружу и направлена вверх от главной плоскости вращения приблизительно на 60°. Когда угловая скорость уменьшается от первой угловой скорости до второй угловой скорости, человека вращают вокруг вспомогательной оси для того, чтобы скомпенсировать тангенциальные силы. Для того чтобы уменьшить ошибку собственного вращения, вращение человека вокруг второй оси равновесия удерживается или блокируется. Компенсация тангенциального ускорения имеет место, например, за счет вращения человека вокруг оси тела, которая проходит параллельно главной оси.
Изобретение также относится к устройству для моделирования ускорений для человека, на которого действует основное ускорение, которое генерируется, по существу, за счет вращения человека на расстоянии вокруг главной оси и за счет ускорения свободного падения, причем величина и направление основного ускорения определяются, по меньшей мере, за счет ускорения свободного падения, тангенциального ускорения и радиального ускорения и причем положение человека по отношению к направлению основного ускорения, по существу, определяется за счет вращения человека вокруг, по меньшей мере, двух вспомогательных осей, причем вспомогательные оси проходят через центр, который лежит в области человека, причем первичные силы, порождающие ошибку, действуют на человека, изменяя величину и направление основного ускорения, причем упомянутые силы, порождающие ошибку, по меньшей мере, частично компенсируются за счет вращения человека вокруг вспомогательных осей, причем вторичные силы, порождающие ошибку, действуют на человека вследствие вращения человека вокруг вспомогательных осей и причем вспомогательные силы, порождающие ошибку, уменьшаются за счет вращения и позиционирования человека.
В принципе, направление основного ускорения 5, действующего на человека, может быть свободно выбрано вдоль произвольной оси тела посредством вращения человека 1 вокруг трех вспомогательных осей. В предыдущих примерах первая ось 13 равновесия или ось рыскания, например, были выбраны в качестве осей тела. В случае моделирования объекта, в котором человека располагают, например, лежа, ось тела, проходящая наклонно через тело человека, также может быть выбрана в качестве желаемого направления основного ускорения. Однако основной кинематический механизм и способ для компенсации вторичных сил, порождающих ошибку, остаются неизменными, изменяется только положение человека.
Следует отметить, что на данном этапе изобретение не ограничено вышеупомянутыми примерами вариантов осуществления. Дополнительные варианты осуществления, соответствующие идее изобретения, также возникают из комбинации отдельных или нескольких признаков, которые могут быть выделены из описания в совокупности, из фигур и/или формулы изобретения. Таким образом, также раскрыты варианты осуществления, которые содержат комбинаций признаков, которые возникают из различных примеров вариантов осуществления. Фигуры, по меньшей мере, частично представляют собой схематические представления, причем размеры и пропорции могут отклоняться от других вариантов осуществления или признаков, не изображенных на чертежах, и от реальных вариантов осуществления.
1. человек
2. голова
3. главная ось
4. расстояние от главной оси вращения
5. основное ускорение
6. угол поворота
7. ускорение свободного падения
8. радиальное ускорение
9. тангенциальное ускорение
10. первая плоскость равновесия - плоскость рыскания
11. вторая плоскость равновесия - плоскость тангажа
12. третья плоскость равновесия - плоскость крена
13. первая ось равновесия или ось рыскания
14. вторая ось равновесия или ось тангажа
15. третья ось равновесия или ось крена
16. первый опорный элемент
17. второй опорный элемент
18. третий опорный элемент
19. первая вспомогательная ось
20. вторая вспомогательная ось
21. третья вспомогательная ось
22. центр
23. устройство движения
24. кабина
25. блок управления
26. главная плоскость вращения
27. первый угол
28. второй угол
29. позиционный угол третьей оси равновесия
30. позиционный угол первой оси равновесия
31. тангенциальный угол
32. основание
33. главный привод
34. главное плечо
35. область воспроизведения изображения
36. корзина тележки
37. тележка с возможностью вертикальной качки
38. первое основное ускорение
39. второе основное ускорение
40. вектор ускорения
41. промежуточное положение
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО МЕХАНИЧЕСКОЙ ЗАЩИТЫ | 2012 |
|
RU2580586C2 |
| СПОСОБ СОЗДАНИЯ АКТИВНЫХ ДВИЖУЩИХ СИЛ В ИЗМЕНЯЕМЫХ МЕХАНИЧЕСКИХ СИСТЕМАХ (ЕГО ВАРИАНТЫ) | 1992 |
|
RU2087746C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СТАТОКИНЕТИЧЕСКИХ РАЗДРАЖЕНИЙ | 1990 |
|
RU2008056C1 |
| МАНИПУЛЯТОР И ПОДВИЖНОЕ УСТРОЙСТВО | 2013 |
|
RU2634995C2 |
| ТАНГЕНЦИАЛЬНАЯ РЕЖУЩАЯ ПЛАСТИНА И ФРЕЗА | 2003 |
|
RU2337795C2 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОГО ПЕРЕМЕЩЕНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ЧЕЛОВЕКА | 2015 |
|
RU2679105C2 |
| МЕХАНИЧЕСКИЙ ВАРИАТОР СКОРОСТИ С ЭКСЦЕНТРИЧЕСКИМИ ДИНАМИЧЕСКИМИ МАССАМИ, ИМЕЮЩИЙ УРАВНОВЕШЕННУЮ КОНСТРУКЦИЮ | 2011 |
|
RU2568149C2 |
| ТАНГЕНЦИАЛЬНАЯ РЕЖУЩАЯ ПЛАСТИНА И ФРЕЗА | 2003 |
|
RU2304037C2 |
| РЕЖУЩАЯ ПЛАСТИНА ДЛЯ ФРЕЗЫ И ФРЕЗА | 2005 |
|
RU2389587C2 |
| УГЛОВАЯ ЗУБЧАТАЯ МУФТА ДЛЯ ПОДВИЖНЫХ ВАЛОВ | 2009 |
|
RU2418211C1 |

Группа изобретений относится к способу и устройству для моделирования ускорений для человека. Для моделирования ускорений генерируют основное ускорение за счет вращения человека на расстоянии вокруг главной оси и за счет вращения и позиционирования вокруг трех вспомогательных осей, проходящих через центр области человека. Вращением вокруг вспомогательных осей компенсируют силы, возникающие при изменении величины и направления основного ускорения. Позиционированием и вращением вокруг трех вспомогательных осей уменьшают силы, возникающие при вращении вокруг вспомогательных осей. Устройство для моделирования ускорений содержит три опорных элемента, устройство фиксации для человека, блок управления, расположенных определенным образом с возможностью вращения определенным образом опорных элементов. Обеспечивается качество моделирования ускорений. 2 н. и 18 з.п. ф-лы, 6 ил.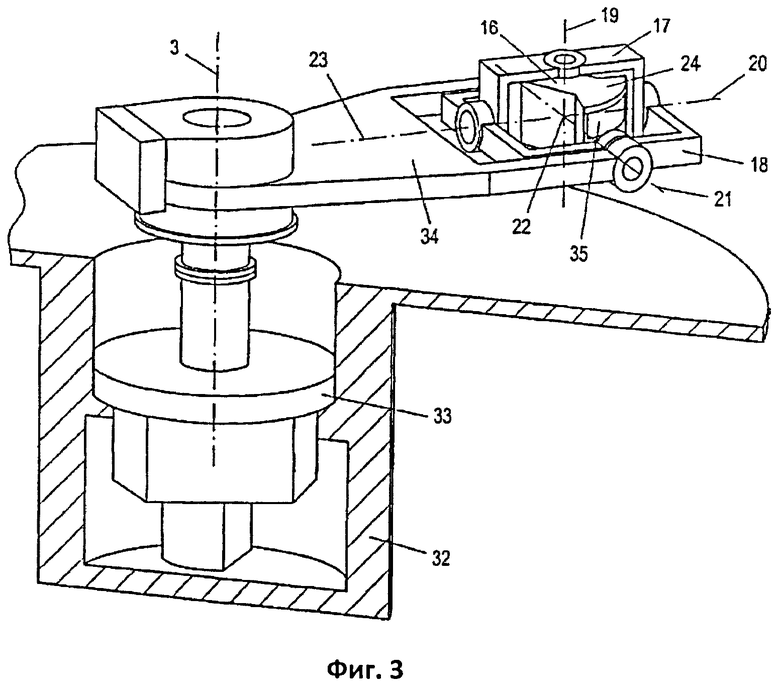
1. Способ моделирования ускорений для человека, на которого действует основное ускорение, которое, по существу, генерируется за счет вращения человека на расстоянии вокруг главной оси и за счет гравитационного ускорения,
- причем величина и направление основного ускорения определяются, по меньшей мере, за счет ускорения свободного падения, тангенциального ускорения и радиального ускорения,
- причем положение человека по отношению к направлению основного ускорения определяется, по существу, за счет вращения и/или позиционирования человека вокруг, по меньшей мере, двух вспомогательных осей,
- причем вспомогательные оси проходят через центр, который находится в области человека,
- причем первичные силы, порождающие ошибку, действуют на человека тогда, когда происходит изменение величины и направления основного ускорения, причем упомянутые силы, порождающие ошибку, по меньшей мере, частично компенсируются за счет вращения человека вокруг вспомогательных осей,
- и причем вторичные силы, порождающие ошибку, действуют на человека вследствие вращения человека вокруг вспомогательных осей,
отличающийся тем, что
вторичные силы, порождающие ошибку, уменьшаются за счет вращения и позиционирования человека вокруг трех вспомогательных осей.
2. Способ по п. 1, отличающийся тем, что первичные силы, порождающие ошибку, увеличивают для того, чтобы уменьшить вторичные силы, порождающие ошибку.
3. Способ по п. 2, отличающийся тем, что для того, чтобы уменьшить первичные силы, порождающие ошибку, и/или вторичные силы, порождающие ошибку, в одной плоскости равновесия, первичные силы, порождающие ошибку, и/или вторичные силы, порождающие ошибку, увеличивают в другой плоскости равновесия.
4. Способ по п. 3, отличающийся тем, что угловые ускорения, вызванные первичными силами, порождающими ошибку, и угловые ускорения, вызванные вторичными силами, порождающими ошибку, находятся ниже или в области порога раздражения человека.
5. Способ по п. 4, отличающийся тем, что порог раздражения составляет от 0.8°/с2 до 5°/с2, предпочтительно от 1°/с2 до 3°/с2.
6. Способ по п. 4, отличающийся тем, что первичные силы, порождающие ошибку, силы основного ускорения, порождающие ошибку, и/или силы Кориолиса, порождающие ошибку, и вторичные силы, порождающие ошибку, включают в себя ошибки собственного вращения и/или вращательные инерционные силы.
7. Способ по п. 6, отличающийся тем, что для того, чтобы уменьшить вращательные инерционные силы, угловое ускорение и/или градиент углового ускорения вращения человека вокруг вспомогательных осей ограничен и/или ослаблен.
8. Способ по п. 7, отличающийся тем, что человека вращают вокруг главной оси и вокруг вспомогательных осей так, что угловое ускорение каждого полукружного канала в соответствующей плоскости равновесия находится ниже порога раздражения человека.
9. Способ по п. 8, отличающийся тем, что порог раздражения составляет от 0.8°/с2 до 5°/с2, предпочтительно от 1°/с2 до 3°/с2.
10. Способ по п. 1 или 2, отличающийся тем, что для того, чтобы смоделировать изменяющееся ускорение вдоль оси тела человека, человека
- вращают с постоянной первой угловой скоростью вокруг главной оси, на которой направление первого основного ускорения образует первый угол по отношению к направлению ускорения свободного падения,
- затем человека ускоряют или замедляют до второй угловой скорости, при которой направление второго основного ускорения образует второй угол по отношению к направлению ускорения свободного падения,
- и третья ось равновесия человека поворачивается в направление, отклоняющееся от тангенциальной плоскости.
11. Способ по п. 1 или 2, отличающийся тем, что для того, чтобы смоделировать изменяющееся ускорение вдоль оси тела человека, человека
- вращают с постоянной первой угловой скоростью вокруг главной оси, на которой направление первого основного ускорения образует первый угол по отношению к направлению ускорения свободного падения,
- затем человека ускоряют или замедляют до второй угловой скорости, при которой направление второго основного ускорения образует второй угол по отношению к направлению ускорения свободного падения,
- третья ось равновесия человека поворачивается в или проходит в направлении, отклоняющемся от тангенциальной плоскости,
- и ось тела человека поворачивается в промежуточное положение между направлением первого основного ускорения и направлением второго основного ускорения и/или в область первого основного ускорения или в область второго основного ускорения.
12. Способ по п. 10, отличающийся тем, что положение третьей оси равновесия и/или оси тела человека между тангенциальной плоскостью и радиальной плоскостью контролируют и/или активно регулируют за счет вращения человека вокруг трех вспомогательных осей, и причем, в частности, вращение оси тела и осей равновесия изменяется или позиционируется посредством изменения позиции человека вокруг вспомогательных осей.
13. Способ по п. 11, отличающийся тем, что положение третьей оси равновесия и/или оси тела человека между тангенциальной плоскостью и радиальной плоскостью контролируют и/или активно регулируют за счет вращения человека вокруг трех вспомогательных осей, и причем, в частности, вращение оси тела и осей равновесия изменяется или позиционируется посредством изменения позиции человека вокруг вспомогательных осей.
14. Устройство для моделирования ускорений для человека, содержащее:
- первый опорный элемент (16), который содержит устройство фиксации для, по меньшей мере, одного человека (1) и расположен вокруг первой вспомогательной оси (19) с возможностью вращения относительно второго опорного элемента (17);
- второй опорный элемент (17), который расположен вокруг второй вспомогательной оси (20) с возможностью вращения относительно третьего опорного элемента (18),
причем первая вспомогательная ось (19) и вторая вспомогательная ось (20) расположены, по существу, ортогонально друг другу;
отличающееся тем, что
второй опорный элемент (17) расположен с возможностью вращения вокруг третьей вспомогательной оси (21) на устройстве движения (23) для того, чтобы скомпенсировать или уменьшить вторичные силы, порождающие ошибку.
15. Устройство по п. 14, отличающееся тем, что вторая вспомогательная ось и третья вспомогательная ось расположены, по существу, ортогонально друг к другу.
16. Устройство по п. 14, отличающееся тем, что, по меньшей мере, один блок управления предоставлен для контроля и/или активного регулирования приводов для перемещения опорных элементов (16, 17, 18) и устройства (23) движения.
17. Устройство по п. 16, отличающееся тем, что движение приводами опорных элементов (16, 17, 18) вокруг вспомогательных осей (19, 20, 21) контролируется и/или активно регулируется посредством блока управления, и тем, что движение находится ниже или в области порога раздражения человека.
18. Устройство по п. 16, отличающееся тем, что движение приводами вспомогательных осей контролируется посредством блока управления, причем угловые скорости движения находятся ниже порога раздражения человека.
19. Устройство по п. 14, отличающееся тем, что данное устройство оборудовано для осуществления способа согласно любому из пп. 1-12.
20. Устройство по любому из пп. 14-18, отличающееся тем, что устройство (23) движения выполнено в качестве одноплечевой центрифуги, центрифуги с тележкой с возможностью перемещения, центрифуги с тележкой с возможностью перемещения и вертикальной качки, двухплечевой центрифуги с тележкой с возможностью перемещения с обеих сторон, двухплечевой центрифуги с тележкой с возможностью перемещения и вертикальной качки с обеих сторон или роботизированного плеча с, по меньшей мере, одной вращательной и/или поступательной степенью свободы.
| US 5021982 A, 06.06.1991 | |||
| US 5353242 A, 04.10.1994 | |||
| US 6910971 B2, 28.06.2005 | |||
| ТРЕНАЖЕР ДЛЯ ИМИТАЦИИ ПЕРЕМЕЩЕНИЯ И ОРИЕНТАЦИИ | 2009 |
|
RU2520866C2 |
| US 4710128 A1, 01.12.1987. | |||

