Изобретение относится к тренажеру для имитации перемещения и ориентации с карданным подвесом для кабины, установленной на совершающих вертикальные колебания салазках, линейно перемещающихся в гондоле салазок.
Такие тренажеры применяются для обучения и безопасных тренировок пилотов. Целью таких тренажеров является имитация состояний в полете, максимально приближенных к действительности, какие могут произойти в экстремальных случаях выполнения полетов, как, например, у вертолетов и самолетов при боевом применении. Пример тренажеров описан в US 2004/0197742 А1.
Проблема таких тренажеров заключается в том, что относительно большие массы должны ускоряться, тормозиться, вращаться или перемещаться как-либо иначе бесступенчато, так что к технике привода и статике отдельных деталей должны предъявляться высокие требования.
Задачей настоящего изобретения является создание такого тренажера, который мог бы имитировать все мыслимые состояния перемещения и ориентации и при этом был бы надежен в работе, имел бы компактные габариты и изготавливался бы с приемлемыми затратами.
В настоящем изобретении вышеупомянутого тренажера для имитации перемещения и ориентации с карданным подвесом для кабины, установленной в совершающих вертикальные колебания салазках (heave-Schlitten - салазки «вертикальной качки»), линейно перемещающихся в гондоле салазок, задача решается за счет того, что гондола салазок является вращающейся, а для линейного перемещения совершающих вертикальные колебания салазок в гондоле салазок предусмотрен тросовый привод, причем для совершающих вертикальные колебания салазок предусмотрены вращающиеся шкивные устройства (Heave-Scheibenanordnung) для перемещения совершающих вертикальные колебания салазок, а тросовый привод имеет отрезки троса, воздействующие на совершающие вертикальные колебания салазки, посредством которых усилия перемещения передаются совершающим вертикальные колебания салазкам, причем эти отрезки троса предпочтительно выполнены в виде петель троса, уложенных вокруг шкивных устройств.
Кроме того, отрезки троса, воздействующие на совершающие вертикальные колебания салазки, установлены попарно взаимодействующими между собой, а пары отрезков троса, взаимодействующие между собой для перемещения совершающих вертикальные колебания салазок, с помощью натяжного устройства предварительно натянуты относительно друг друга. Дополнительно изобретение отличается тем, что сумма расстояний между отрезками троса, попарно воздействующими на совершающие вертикальные колебания салазки, и соответствующими ближайшими к ним, если смотреть в направлении троса, направляющими шкивами при перемещении совершающих вертикальные колебания салазок является постоянной, причем гондола салазок установлена с возможностью вращения и консольно выступает по обе стороны от оси вращения, и совершающие вертикальные колебания салазки могут перемещаться в обе стороны от оси вращения гондолы салазок, причем тросовый привод содержит тросы, натяжение которых поддерживается натяжным устройством, причем тросовый привод содержит неподвижный трос, закрепленный на гондоле салазок или соединенный с ней, причем тросовый привод охватывает переднее и заднее устройства с направляющими шкивами, расположенные на гондоле салазок, шкивное устройство, расположенное на совершающих вертикальные колебания салазках, а также приводной шкив троса, и для привода вращения гондолы салазок предусмотрены двигатели и соединительные элементы для передачи усилий, причем соединительные элементы предпочтительно выполнены в виде фрикционных колец. Кроме того, согласно изобретению для привода приводного шкива троса предусмотрены двигатели и соединительные элементы для передачи усилий, причем соединительные элементы предпочтительно выполнены в виде фрикционных колец, причем двигатели для привода гондолы салазок и двигатели для перемещения совершающих вертикальные колебания салазок установлены стационарно, причем трос дополнительно охватывает также натяжной шкив, установленный на гондоле салазок, и переднее и заднее устройства с направляющими шкивами содержат по два направляющих шкива. Другие преимущества заключаются в том, что шкивное устройство для создания вертикальных колебаний содержит четыре шкива, установленных на совершающих вертикальные колебания салазках с возможностью вращения независимо друг от друга, что на одной оси для вертикальных колебаний установлены по два шкива для вертикальных колебаний, причем оба отрезка троса, идущие от приводного шкива троса, проходят по переднему и заднему направляющим шкивам, а оттуда подаются каждый на один из шкивов для вертикальных колебаний, причем натяжной шкив образует пятый направляющий шкив, причем одна точка крепления конца троса расположена на переднем, а другая точка крепления - на заднем конце гондолы салазок.
Тренажер согласно изобретению отличается также тем, что гондола салазок выполнена в виде двустороннего рычага центрифуги, установленного с возможностью вращения и приводимого во вращение посредством приводной установки, причем установленный на салазках карданный подвес с подвешенной в нем кабиной приводится в движение по вертикали с помощью вертикального подъемника, причем длины отрезка V троса, тянущегося от направляющего шкива до приводного шкива, отрезка VI троса, тянущегося от приводного шкива троса до натяжного шкива, и отрезка VII троса, тянущегося от натяжного шкива до направляющего шкива, являются неизменными.
Наконец, тренажер отличается также тем, что при вращении приводного шкива отрезки I, II, III и IV троса в зависимости от направления вращения испытывают сокращение или удлинение, а отрезки VIII, IX, X и XI троса испытывают удлинение или сокращение, вследствие чего происходит линейное перемещение совершающих вертикальные колебания салазок, причем отрезки I-XI троса установлены в трех плоскостях Е1-Е3, расположенных друг над другом, причем для смены плоскости шкивные устройства для вертикальных колебаний и два из направляющих шкивов установлены под углом, что отрезки II и X троса установлены в самой верхней плоскости Е1, отрезки I, IX, III, XI троса - в средней плоскости Е2, а отрезки VIII, VII/VI, V и IV - в самой нижней плоскости Е3, причем отрезки I и XI заканчиваются в точках Р1 и Р2 крепления, и что при вращении приводного шкива шкивы для вертикальных колебаний вращаются в противоположном направлении относительно шкивов для вертикальных колебаний, следующих направлению приводного шкива.
Другие предпочтительные признаки заимствуются из пунктов формулы изобретения и последующего описания, а также чертежей.
Ниже изобретение описывается на примере выполнения. На фиг.1 тренажер имитации для перемещения и ориентации согласно изобретению изображен в перспективе. На фиг.2 и 3 показаны сечения тренажера по соответствующим друг другу линиям. На фиг.4 изображен вид тренажера сверху. На фиг.5 изображен тросовый привод в разрезе. На фиг.6 схематически изображена проводка тросов управления с направляющими шкивами и шкивами для вертикальных колебаний, а на фиг.7 - распределение отрезков троса по отдельным плоскостям с соответствующими шкивами.
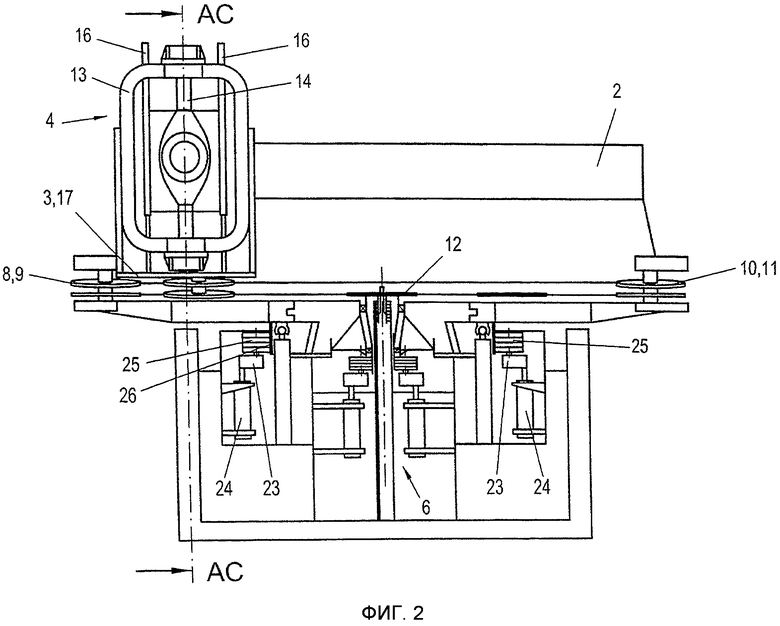
Согласно фиг.1 тренажер установлен на прочном фундаменте 1, заключающем в себе приводную установку, приводящую в движение гондолу 2 салазок. Гондола салазок выполнена крутильно-жесткой и может воспринимать большие усилия. Действие гондолы салазок - это действие двустороннего рычага центрифуги обычных центрифуг, причем вдоль гондолы салазок перемещаются совершающие вертикальные колебания салазки 3, несущие карданный подвес 4. В центре карданного подвеса 4 установлена кабина 5, в которой обычно могут сидеть один или максимум два испытуемых. Эта кабина 5 штрихпунктиром показана лишь на фиг.3. Кабиной 5 может быть, например, кабина летчика с соответствующими аудиовизуальными устройствами или область управления другого транспортного средства, например легкового автомобиля. Совершающие вертикальные колебания салазки 3 с находящимся на них карданным подвесом могут перемещаться вдоль гондолы салазок между двумя крайними положениями. На фиг.1 совершающие вертикальные колебания салазки находятся в крайнем левом положении, в последующем именуемом передним положением. Когда совершающие вертикальные колебания салазки перемещаются в правое крайнее положение, они оказываются в заднем положении, причем названия «переднее» и «заднее» определяются произвольно только для возможности различения. На фиг.2 изображено продольное сечение по линии А-А на фиг.4, причем сечение проходит также через фундамент 1 и приводную установку 23 для гондолы 2 салазок и тросового привода 6. На обоих концах донной области гондолы 2 салазок имеются направляющие колеса, а именно по два направляющих колеса для троса 7 привода для движения салазок. Передние направляющие шкивы 8, 9 установлены с возможностью вращения на переднем конце гондолы салазок, а задние направляющие шкивы 10, 11 - с возможностью вращения на заднем конце гондолы салазок.
Для привода по существу служат две приводные установки, а именно приводная установка 23 для вращения гондолы салазок и тросовый привод 6 для горизонтального перемещения совершающих вертикальные колебания салазок 3.
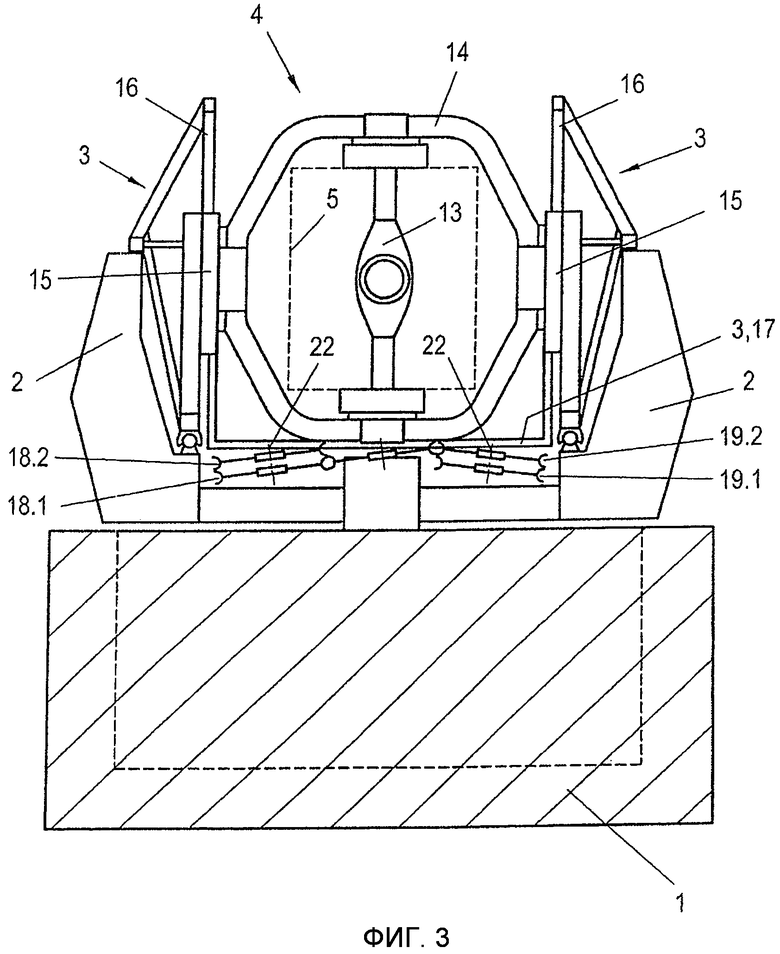
Карданный подвес 4 известным образом содержит две карданные дуги, а именно кольцо Yaw 13 и рамку 14 гиродатчика крена, положение которых относительно друг друга является произвольно регулируемым и поворотным. Кроме того, весь карданный подвес установлен на вертикальном подъемнике 15 с возможностью вращения, благодаря чему кабина, находящаяся в карданном подвесе, может также иметь еще составляющую движения в вертикальном направлении.
Приводная установка 23 для гондолы салазок содержит несколько, например восемь, двигателей 24, которые посредством фрикционных колец 25 могут приводить во вращение ведомое кольцо 26. Описание тросового привода 6 следует ниже со ссылкой на фиг.5.
Сечение салазок в изображении на фиг.3 проходит по линии АС-АС на фиг.2 и показывает конструктивное устройство тренажера. Как видно, гондола 2 салазок выполнена ваннообразной, а совершающие вертикальные колебания салазки 3 перемещаются по рельсам гондолы салазок. По обе стороны совершающих вертикальные колебания салазок 3 установлены вертикальные подъемные рельсы 16, по которым вертикальный подъемник 15 с карданным подвесом 4 и кабиной 5 может перемещаться вертикально. В днище 17 салазок 3 предусмотрены два шкивных устройства для вертикальных колебаний 18, 19, причем каждые два шкива для вертикальных колебаний 18.1 и 18.2, а также 19.1 и 19.2 установлены на общей оси для вертикальных колебаний 22 с возможностью вращения.
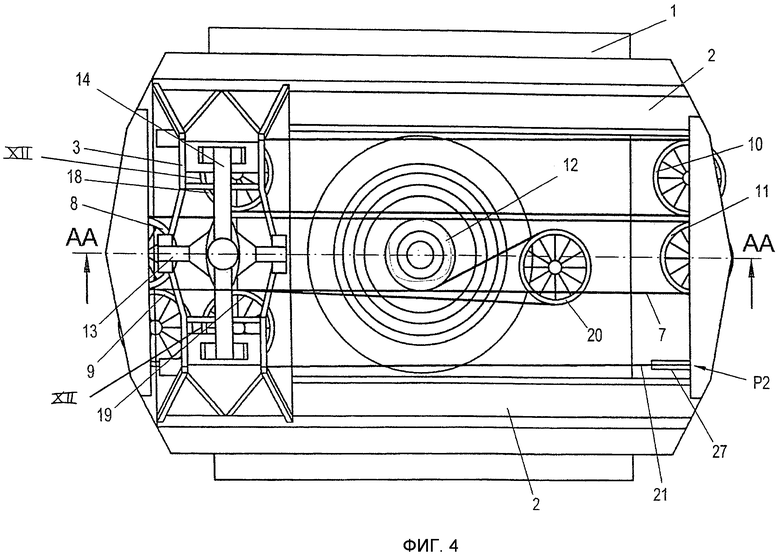
На фиг.4 изображен вид тренажера сверху, причем совершающие вертикальные колебания салазки 3 показаны в левом, т.е. переднем, положении. Виден центральный шкив 12 тросового привода, с помощью которого совершающие вертикальные колебания салазки 3 могут линейно перемещаться внутри гондолы салазок. Оба передних 8, 9 и задних направляющих шкива 10, 11 для направления троса 7, как уже было сказано выше, закреплены на гондоле 2 салазок с возможностью вращения. Шкивные устройства для вертикальных колебаний 18, 19 закреплены на совершающих вертикальные колебания салазках 3 с возможностью вращения, а именно с возможностью вращения независимо друг от друга. Кроме того, виден еще один шкив 20, выступающий для троса 7 также в качестве направляющего шкива и служащий для удержания троса 7 в закрепленном состоянии. Оба конца 21 троса 7 прочно закреплены на гондоле салазок, а именно на соответствующих противоположных концах гондолы салазок. На фиг.4 виден один из концов троса с креплением 27 троса в точке Р2 крепления. Другой конец троса и его точка Р1 крепления закрыты совершающими вертикальные колебания салазками 3.
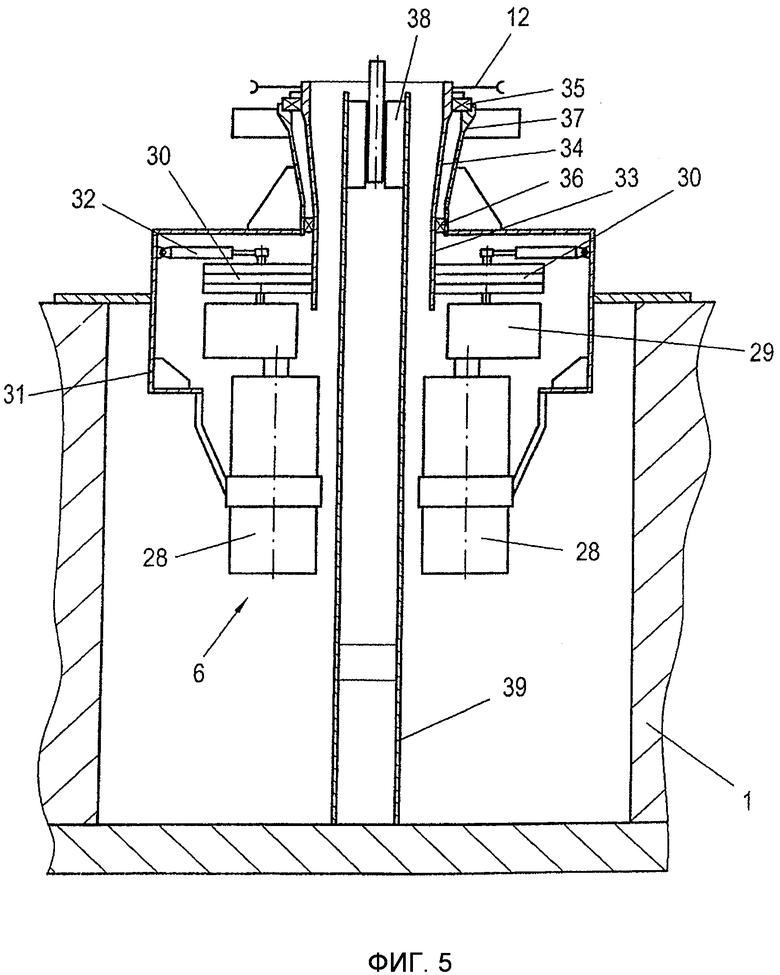
На основе фиг.5 тросовый привод 6 описывается несколько подробнее.
Двигатели 28 - здесь в количестве пяти - с коробкой передач 29 и каждый с тремя фрикционными кольцами 30 закреплены на кронштейне 31 для двигателей. Кронштейны для двигателей подвешены с возможностью вращения и с помощью пневмоцилиндров 32 могут прижимать фрикционные кольца 30 к ведомому кольцу 33. Ведомое кольцо 33 снизу закреплено на полом валу 34, а он передает вращение приводному шкиву 12 троса. Полый вал 34 установлен в корпусе 37 тросового привода посредством «верхнего подшипника» 35 и «нижнего подшипника» 36. Поскольку вся электроника должна управляться с помощью полого вала и фрикционных колец, ветвь тросового привода снабжена полым валом.
Для перемещения салазок 3 для вертикальных колебаний в гондоле 2 салазок во всяком случае служит работающий от двигателя приводной шкив 12 троса с проводкой троса 7 управления.
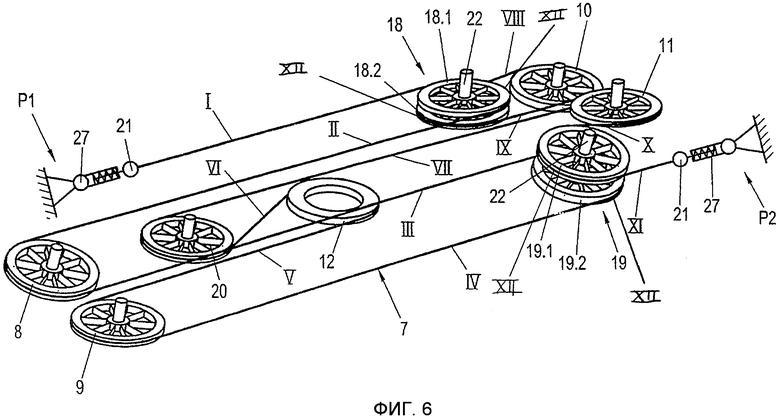
На фиг.6 схематически изображена проводка троса 7 управления между обеими точками Р1 и Р2 крепления, передними направляющими шкивами 8, 9, задними управляющими шкивами 10, 11, приводным шкивом 12 и натяжным шкивом 20, которые все установлены на гондоле салазок с возможностью вращения, и обоими шкивными устройствами для вертикальных колебаний 18, 19, которые установлены на совершающих вертикальные колебания салазках с возможностью вращения и могут линейно перемещать последние.
Шкивные устройства для вертикальных колебаний 18, 19 находятся в показанном заднем крайнем положении. Для перемещения шкивных устройств для вертикальных колебаний 18, 19, а с ними салазок влево в переднее положение приводной шкив 2 следует вращать против часовой стрелки, причем отрезки I и II троса укорачиваются, а отрезки VIII и IX троса в такой же степени удлиняются. Вращение соответствующих шкивов 18.1 и 18.2, а также 19.1 и 19.2, установленных друг над другом, происходит, соответственно, в противоположных направлениях.
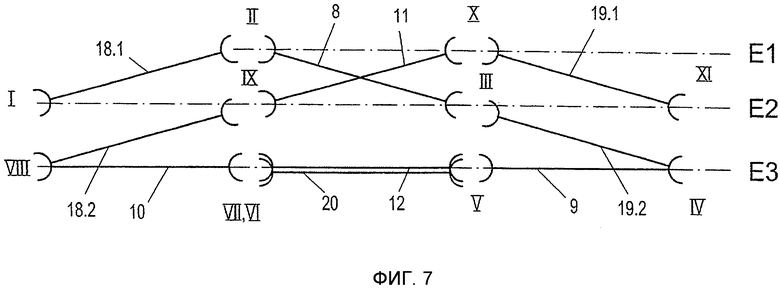
На фиг.7 показано, что отрезки тросов проходят в разных плоскостях, а именно в трех плоскостях Е1, Е2 и Е3. Это распределение по разным плоскостям необходимо, чтобы проводки тросов управления не мешали друг другу. Для смены плоскостей шкивные устройства для вертикальных колебаний 18, 19 и два из направляющих шкивов 8, 11 установлены под углом. Отрезки II и X троса расположены в самой верхней плоскости Е1, отрезки I, IX, III, XI троса - в средней плоскости Е2, а отрезки VIII, VII/VI, V и IV троса - в самой нижней плоскости Е3, причем отрезки I и XI троса заканчиваются в точках Р1 и Р2 крепления.
Кроме того, на фиг.4 и 6 показаны отрезки (XII) троса, воздействующие на совершающие вертикальные колебания салазки.
Ниже вышеописанное изобретение более подробно описывается в отношении своего принципа действия. Как упоминалось вначале, тренажер служит для имитации подвижных систем, как, например, транспортных средств, судов, самолетов и т.п. При этом пользователю, находящемуся в кабине 5, с помощью множества искусственно создаваемых восприятий органами чувств мистифицируется виртуальная реальность, причем последний, как будет показано ниже, может также оказывать активное воздействие. Возбуждения органов чувств, с одной стороны, вызываются аудиовизуальными раздражителями, воздействующими на пользователя с помощью систем воспроизведения изображения, а также систем воспроизведения звука. С другой стороны, устройством согласно изобретению создаются ускорения или усилия, воздействующие на пользователя. В результате комбинации аудиовизуальных и физических чувственных ощущений человеческий мозг интерпретирует виртуальные состояния движения. Эта интерпретация действует на пользователя тем реалистичнее, чем точнее восприятия органами чувств соответствуют реальным восприятиям таких ситуаций органами чувств. По этой причине большое значение имеет как можно более реалистическая подача сигналов пользователю.
Кроме того, в настоящем тренажере для имитации перемещения и ориентации предусмотрен орган управления, с помощью которого пользователь может управлять перемещениями подвижной системы в реальном мире.
Этот сигнал управления пользователя и возможные внешние воздействия (например, ветер, маршрут), которые можно назвать возмущающими воздействиями, подаются на физическую имитационную модель. Последняя соответствует математическому отображению реального поведения имитируемого объекта. Она содержит такие параметры, как инерционности масс, сопротивления и т.д. С помощью этой модели вычисляются ускорения, усилия и их ориентации, которые должны доводиться до пользователя в виртуальном мире.
Эти ускорения формируются тренажером для имитации перемещения и ориентации согласно изобретению различными способами.
Ускорение за счет вращения гондолы салазок
При этом гондола 2 салазок вращается вокруг своей оси вращения, причем она с обеих сторон выступает за эту ось. В гондоле салазок с возможностью линейного перемещения установлены совершающие вертикальные колебания салазки 3. Если эти совершающие вертикальные колебания салазки 3 находятся в точности над осью вращения вращающейся гондолы салазок, то на пользователя не действуют никакие ускорения. Хотя пользователь вращается вокруг оси своего тела, он воспринимает это состояние как неподвижное, поскольку в закрытой кабине 5 визуальные раздражители вращения у него отсутствуют.
Если теперь совершающие вертикальные колебания салазки удаляются от оси вращения, то с удалением от оси вращения, в первую очередь, увеличивается радиальное ускорение. Пользователем воспринимается результирующее ускорение ускорения силы тяжести и радиального ускорения. Если совершающие вертикальные колебания салазки движутся обратно и пересекают ось вращения гондолы салазок, то пользователь ощущает смену ориентации радиального ускорения. Маятниковое движение совершающих вертикальные колебания салазок относительно оси вращения соответствует, например, ускорениям при движении легкового автомобиля по траектории «змейка».
Для варьирования этого результирующего ускорения по величине может варьироваться или угловая скорость гондолы салазок, или совершающие вертикальные колебания салазки могут по-разному перемещаться дальше кнаружи.
Ускорение с помощью линейного привода
Линейное изменение скорости совершающих вертикальные колебания салазок 3 в направлении вдоль гондолы 2 салазок с помощью тросового привода 6 согласно изобретению, а также линейное изменение скорости карданного подвеса 4 за счет вертикального подъема являются дополнительными возможностями придания ускорений пользователю.
Изменение направления ускорения
Для изменения направления результирующего ускорения, действующего на тело, чтобы создать впечатление изменения направления ускорения, необходимо перемещать само тело. Это делается с помощью карданного подвеса 4 кабины 5. Этот карданный подвес содержит две карданные дуги, а именно кольцо Yaw и рамку 14 гиродатчика крена, положение которых относительно друг друга является произвольно регулируемым и поворотным. Теперь с помощью этих в общей сложности трех степеней свободы вращения кабину 5 и тем самым тело пользователя можно вращать, как угодно.
Благодаря этому множеству степеней свободы, а также возможностям ускорения телу можно мистифицировать процессы перемещения на все лады. Эта гибкость является большим преимуществом настоящего изобретения.
Для перемещения компонентов тренажера для имитации перемещения и ориентации предусмотрен ряд приводов. Управляющие воздействия для этого привода вычисляются или по физической имитационной модели, или они могут задаваться из центра управления вручную. Формирование аудиовизуальных раздражителей также может вызываться физической имитационной моделью или быть следствием определенного процесса.
Определение осей перемещения предпочтительного варианта выполнения
Перемещение совершающих вертикальные колебания салазок 3 в гондоле 2 салазок происходит по прямой линии, причем прямая линия проходит перпендикулярно оси вращения и имеет с ней общую точку пересечения.
Направление перемещения вертикального подъемника, в свою очередь, перпендикулярно прямой перемещения совершающих вертикальные колебания салазок и тем самым параллельно оси вращения гондолы 2 салазок.
Ось вращения карданного подвеса 4 относительно вертикального подъемника 15 проходит тангенциально круговой орбите гондолы, а тем самым горизонтально и перпендикулярно направлению перемещения вертикального подъемника.
Ось вращения, предусмотренная в кольце Yaw 13, проходит перпендикулярно оси вращения карданного подвеса, а ось вращения кабины в рамке 14 гиродатчика крена, в свою очередь, проходит ортогонально оси вращения в рамке 14 гиродатчика крена.
Таким образом, оси вращения кольца Yaw 13, рамки 14 гиродатчика крена и подвеса в вертикальном подъемнике в любой момент имеют общую точку пересечения.
В этом предпочтительном варианте выполнения все вышеупомянутые степени свободы обеспечены приводами, работающими независимо друг от друга, и, за исключением линейных приводов, являются неограниченно подвижными, т.е. вращаемыми, сколько угодно.
| название | год | авторы | номер документа |
|---|---|---|---|
| СФЕРИЧЕСКИЙ ТРЕНАЖЕР ВЕСТИБУЛЯРНОГО АППАРАТА | 2017 |
|
RU2640990C1 |
| СИСТЕМА ПОДВИЖНОСТИ КАБИНЫ ПИЛОТАЖНОГО ТРЕНАЖЕРА ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2247432C2 |
| ТРЕНАЖЕР ДЛЯ ИМИТАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2359334C1 |
| СПОСОБ СОЗДАНИЯ ИЗМЕНЯЕМОГО УСКОРЕНИЯ ДЛЯ ИМИТАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1995 |
|
RU2081458C1 |
| НАТЯЖНОЕ УСТРОЙСТВО РЕМЕННОГО ПРИВОДА | 2001 |
|
RU2240453C1 |
| СДВОЕННОЕ ЛИНЕЙНОЕ УСТРОЙСТВО ДЛЯ НАТЯЖЕНИЯ РЕМНЯ | 2001 |
|
RU2240452C1 |
| УСТРОЙСТВО ДЛЯ ПРОСТРАНСТВЕННОГО ПЕРЕМЕЩЕНИЯ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ЧЕЛОВЕКА | 2015 |
|
RU2679105C2 |
| СКЛАДНОЙ СТОЛ | 2015 |
|
RU2696577C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С МУСКУЛЬНЫМ ДВИГАТЕЛЕМ | 1992 |
|
RU2033367C1 |
| СИЛОВОЙ ТРЕНАЖЕР РОМАНА ЗАТИРАЛЬНОГО | 2015 |
|
RU2579728C1 |
Изобретение относится к тренажеру для имитации перемещения и ориентации с карданным подвесом (4) для кабины (5), установленной в совершающих вертикальные колебания салазках (3), линейно перемещающихся в гондоле (2) салазок. Гондола (2) салазок является вращающейся, и для линейного перемещения салазок (3) в гондоле (2) предусмотрен тросовый привод. Технический результат заключается в повышении надежности работы тренажера. 25 з.п. ф-лы, 7 ил.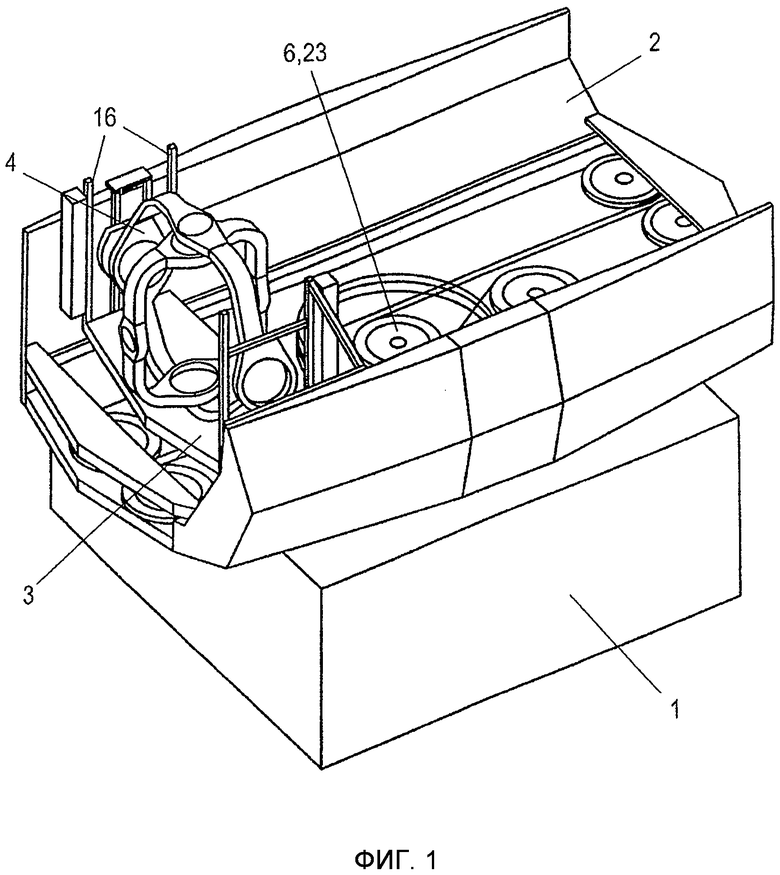
1. Тренажер для имитации перемещения и ориентации с карданным подвесом (4) для кабины (5), установленной в совершающих вертикальные колебания салазках (3), линейно перемещающихся в гондоле (2) салазок, отличающийся тем, что гондола (2) салазок установлена с возможностью вращения, а для линейного перемещения совершающих вертикальные колебания салазок (3) в гондоле (2) салазок предусмотрен тросовый привод.
2. Тренажер по п.1, отличающийся тем, что для совершающих вертикальные колебания салазок (3) предусмотрены вращающиеся шкивные устройства (18, 19) для вертикальных колебаний.
3. Тренажер по п.1, отличающийся тем, что тросовый привод (6) имеет отрезки (XII) троса, воздействующие на совершающие вертикальные колебания салазки (3), посредством которых усилия перемещения передаются совершающим вертикальные колебания салазкам, причем отрезки (XII) троса, предпочтительно, выполнены в виде петель троса, уложенных вокруг шкивных устройств для вертикальных колебаний.
4. Тренажер по п.3, отличающийся тем, что отрезки (XII) троса, воздействующие на совершающие вертикальные колебания салазки, установлены попарно взаимодействующими между собой.
5. Тренажер по п.4, отличающийся тем, что пары отрезков троса, взаимодействующие между собой для перемещения совершающих вертикальные колебания салазок, с помощью натяжного устройства предварительно натянуты относительно друг друга.
6. Тренажер по п.1, отличающийся тем, что сумма расстояний между отрезками (XII) троса, попарно воздействующими на совершающие вертикальные колебания салазки, и соответствующими ближайшими к ним, если смотреть в направлении троса, направляющими шкивами (8, 9 или 10, 11) при перемещении совершающих вертикальные колебания салазок является постоянной.
7. Тренажер по п.1, отличающийся тем, что гондола (2) салазок установлена с возможностью вращения и консольно выступает с обеих сторон от оси вращения, причем совершающие вертикальные колебания салазки (3) установлены с возможностью перемещения в обе стороны от оси вращения гондолы салазок.
8. Тренажер по п.1, отличающийся тем, что тросовый привод (6) содержит тросы (7), натяжение которых поддерживается натяжным устройством.
9. Тренажер по п.1, отличающийся тем, что тросовый привод (6) имеет неподвижный трос (7), закрепленный на гондоле (2) салазок или соединенный с ней, причем тросовый привод (6) охватывает переднее устройство (8, 9) и заднее устройство (10, 11) с направляющими шкивами, расположенные на гондоле (2) салазок, шкивное устройство (18, 19) для вертикальных колебаний, расположенное на салазках, а также приводной шкив (12) троса.
10. Тренажер по п.1, отличающийся тем, что для привода вращения гондолы салазок предусмотрены двигатели (24) и соединительные элементы для передачи усилий, причем соединительные элементы, предпочтительно, выполнены в виде фрикционных колец (25).
11. Тренажер по п.1, отличающийся тем, что для привода приводного шкива (12) троса предусмотрены двигатели и соединительные элементы для передачи усилий, причем соединительные элементы предпочтительно выполнены в виде фрикционных колец (30).
12. Тренажер по п.1, отличающийся тем, что двигатели (24) для привода гондолы (2) салазок и двигатели (28) для перемещения совершающих вертикальные колебания салазок (3) установлены стационарно.
13. Тренажер по п.1, отличающийся тем, что трос (7) дополнительно охватывает также натяжной шкив (20), установленный на гондоле (2) салазок.
14. Тренажер по п.1, отличающийся тем, что переднее (8, 9) и заднее (10, 11) устройства с направляющими шкивами содержат по два направляющих шкива.
15. Тренажер по п.1, отличающийся тем, что шкивное устройство (18, 19) для вертикальных колебаний содержит четыре шкива для вертикальных колебаний, установленных на салазках (3) с возможностью вращения независимо друг от друга.
16. Тренажер по п.1, отличающийся тем, что на одной оси для вертикальных колебаний (22) установлены по два шкива для вертикальных колебаний.
17. Тренажер по п.1, отличающийся тем, что оба отрезка троса, идущих от приводного шкива (12) троса, проходят по передним (8, 9) и задним (10, 11) направляющим шкивам, а оттуда подаются каждый на один из шкивов для вертикальных колебаний.
18. Тренажер по п.1, отличающийся тем, что натяжной шкив (20) образует пятый направляющий шкив.
19. Тренажер по п.1, отличающийся тем, что одна точка крепления конца троса (7) расположена на переднем, а другая точка крепления - на заднем конце гондолы (2) салазок.
20. Тренажер по п.1, отличающийся тем, что гондола (2) салазок выполнена в виде двустороннего рычага центрифуги, установленного с возможностью вращения и приводимого во вращение посредством приводной установки (23).
21. Тренажер по п.1, отличающийся тем, что установленный на салазках (3) карданный подвес (4) с подвешенной в нем кабиной (5) приводится в движение по вертикали с помощью вертикального подъемника (15).
22. Тренажер по п.1, отличающийся тем, что длины отрезка V троса, тянущегося от направляющего шкива (9) до приводного шкива (12), отрезка VI троса, тянущегося от приводного шкива (12) троса до натяжного шкива (20), и отрезка VII троса, тянущегося от натяжного шкива (20) до направляющего шкива (10), являются неизменными.
23. Тренажер по п.1, отличающийся тем, что линейное перемещение совершающих вертикальные колебания салазок (3) обеспечивается тем, что при вращении приводного шкива (12) отрезки I, II, III и IV троса в зависимости от направления вращения испытывают сокращение или удлинение, а отрезки VIII, IX, Х и XI троса испытывают удлинение или сокращение.
24. Тренажер по п.1, отличающийся тем, что отрезки I-XI троса установлены в трех плоскостях Е1-Е3, расположенных друг над другом, причем для смены плоскости шкивные устройства (18, 19) для вертикальных колебаний и два из направляющих шкивов (8, 11) установлены под углом.
25. Тренажер по п.24, отличающийся тем, что отрезки II и Х троса установлены в самой верхней плоскости Е1, отрезки I, IX, III, XI троса - в средней плоскости Е2, а отрезки VIII, VII/VI, V и IV - в самой нижней плоскости Е3, причем отрезки I и XI заканчиваются в точках Р1 и Р2 крепления.
26. Тренажер по п.1, отличающийся тем, что при вращении приводного шкива (12) шкивы (18.1) и (19.2) для вертикальных колебаний вращаются в противоположном направлении относительно шкивов (18.2) и (19.1) для вертикальных колебаний, следующих направлению приводного шкива (12).
| US 20040197742 A1, 27.02.2004 | |||
| СИСТЕМА ПОДВИЖНОСТИ КАБИНЫ ПИЛОТАЖНОГО ТРЕНАЖЕРА ЛЕТАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2247432C2 |
| US 4710128 A, 01.12.1987 | |||
| Пилотажный стенд с подвижной кабиной | 1991 |
|
SU1798811A1 |

