Область техники, к которой относится изобретение
Изобретение относится к области охранной сигнализации, а более конкретно к системам охраны объектов и их периметров с применением радиолокационных станций (РЛС), что позволяет оптимизировать численность сил охраны. Критерием оптимальных сил охраны является минимальное время пресечения несанкционированных действий нарушителя при минимальной численности сил охраны.
Уровень техники
Общеизвестны системы охраны объектов, периметры которых, как правило, по линии заграждений блокируются стационарными или мобильными средствами обнаружения (СО), работающими на том или ином физическом принципе и имеющими, как правило, продольно-объемную или продольную (сейсмические СО) зону обнаружения (ЗО). Широкое распространение получили СО:
а) активные двухпозиционные радиолучевые СО, работающие на радиоволнах длиной от 8 мм до 3,5 см;
б) активные двухпозиционные двух- и многолучевые инфракрасные (ИК) СО;
в) пассивные ИК СО;
г) активные однопозиционные радиолучевые СО;
д) сейсмические СО.
Всем системам охраны, созданным на базе СО с продольно-объемными или продольными ЗО, присущ общий недостаток - такие системы регистрируют место нарушения периметра с точностью до одного участка рубежа охраны (например, с точностью: 50, 100, 150, 200, 250, 500 м), который, как правило, блокируется одним или несколькими СО. Дальнейшая трасса нарушителя по территории объекта остается неизвестной. Сопровождение нарушителя такие системы обеспечить не могут. Подобные системы, в частности, приведены в патентах на полезные модели: «Система охраны периметра «Радиорубеж», патент RU №129283, дата публикации 2013.05.20, «Система охранной сигнализации», патент RU №130729, дата публикации 2013.07.27. Имеется ряд отраслевых нормативных документов, которые устанавливают состав технических средств (ТС) охраны объекта, взаимодействие между ними и другими составными частями систем охраны периметров и территорий объектов. Примером могут служить «Правила физической защиты ядерных материалов, ядерных установок и пунктов хранения ядерных материалов», утвержденных Постановлением Правительства РФ от 19 июля 2007 г. №456, http://www.infosait.ru/norma doc/50/50829/index.htm.
Отсутствие информации о трассе движения нарушителя приводит к необходимости увеличивать силы охраны - наряду с группой силового реагирования (ГСР) необходимо высылать дополнительные группы или иметь постоянные посты, или патрули для превентивного блокирования подходов к жизненно важным объектам охраны. Принятие мер по устранению этого недостатка (отсутствие информации о трассе движения нарушителя), в основном, сейсмическими СО не оказалось достаточно эффективным. В частности, решению задач сопровождения нарушителя сейсмическими СО посвящены патенты на изобретения «Способ обнаружения и определения местоположения нарушителя охраняемой зоны», патент RU №2311686, дата публикации 2007.11.27, «Система обнаружения попыток проникновения на охраняемую территорию», патент RU №2394277, дата публикации 2010.07.10. ЗО одного сейсмоприемника не превышает 10-12 м, что требует очень большого количества сейсмоприемников для сигнального блокирования значительных территорий, делает систему очень дорогой и недостаточно помехоустойчивой. Такие сейсмические СО обычно применяются для блокирования отдельных участков охраняемого рубежа.
Задачу определения местоположения нарушителя значительно лучше решают видеосистемы на базе видеокамер и тепловизоров. Так, в статье Я.Я. Петричковича «Охрана периметра и городских объектов: шаг в будущее» (htpp://www/sw.ua/data/CCTV_04_page_29_31.pdf) подробно рассмотрено применение видеосистем. В статье отмечено, что видеосистемы VMD (Video Motion Detection) - детекторы движения, не обеспечивают надлежащей помехоустойчивости.
Другие видеосистемы - интеллектуальные видеосистемы с компьютерным зрением (ВКЗ) позволяют распознавать объекты и ситуации, проводить анализ видеоинформации. ВКЗ, способны обеспечить детектирование движения при минимальном количестве ложных тревог в любое время суток при естественном освещении.
Этим видеосистемам присущи следующие недостатки:
а) дальность обнаружения и распознавания видеокамерами подвижных объектов в ясную погоду не превышает 500 м; небольшая дальность распознавания приводит к необходимости использовать большое количество видеокамер для блокирования периметра и территории крупного объекта (статья Я.Я. Петричковича «Охрана периметра и городских объектов: шаг в будущее» (htpp://www/sw.ua/data/CCTV_04_page_29_31.pdf);
б) сильная зависимость от погодных условий: туман, мокрый снег, песчаные бури и др. приводят к потере работоспособности оптических систем;
в) влияние иных помеховых факторов: например, рой мошкары перед оптической системой приводит к потере работоспособности.
В качестве примера ВКЗ может служить «Система и способ автоматизированного видеонаблюдения и распознавания объектов и ситуаций», патент RU №2268497, дата публикации 2006.01.20.
В последние годы на рынке ТС охраны появилось большое количество типов РЛС, систем и комплексов охраны на их базе. Работоспособность РЛС практически не зависит от погодных условий, времени суток, освещенности, что их выгодно отличает от оптических систем. Вместе с тем, они позволяют решать вопросы обнаружения, сопровождения, распознавания подвижных объектов и их классификацию. Обнаружение подвижного объекта (пеший человек) может осуществляться на расстоянии до нескольких километров. Все это привело к широкому применению РЛС в системах и комплексах охраны.
Фирмой «Юмирс» разработан и производится радиолокационный комплекс охраны объектов «Радескан» (сайт фирмы «Юмирс» http://www.umirs.ru). Основой комплекса является РЛС «Радескан», работающая в комплексе с тепловизионной камерой серии «АСТРОН». Моноимпульсная активная когерентная РЛС «Радескан» предназначена для обнаружения и распознавания движущихся объектов (человек, транспортное средство, самолет и т.д.) на открытой земной поверхности и в воздухе, а также для обнаружения и распознавания движущихся объектов (водный мотоцикл, лодка, судно и т.п.) на водной поверхности. РЛС «Радескан» обнаруживает подвижной объект и визуально отражает информацию о его движении (дальность, азимут, вектор скорости, площадь отражательной поверхности) на мониторе ноутбука в виде трассы на карте. Тепловизионная камера серии «АСТРОН» (тепловизор) предназначена для охраны протяженных объектов, обнаружения и идентификация людей и транспортных средств на больших расстояниях, когда обычные видеокамеры не способны распознать подвижный объект. Недостатком комплекса охраны объектов «Радескан» является отсутствие возможности идентификации подвижных объектов по признаку «свой-чужой» и управления силами охраны.
В качестве другого примера использования РЛС в охранных целях можно привести систему безопасности для охраны неогороженных объектов «Orwell-R» (ЭЛВИС-НеоТек, http://elvees.ru/index.php?id=234). Данная система обеспечивает круглосуточную всепогодную охрану неогороженных объектов, автоматическое обнаружение подвижных объектов на расстояние до 1,5 км (пеший человек) и в азимуте до 360 градусов. В состав системы безопасности для охраны неогороженных объектов Orwell-R входит один или несколько когерентных дальностно-доплеровских импульсных радиолокаторов Ku-диапазона разработки ЗАО «ЭЛВИС-НЕОТЕК» (http://elvees.ru/home). Недостатком указанной системы безопасности является отсутствие возможности идентификации подвижных объектов по признаку «свой-чужой» и управления силами охраны.
Общеизвестны способы и устройства идентификации подвижных объектов по критерию «свой-чужой». Например, для контроля трассы следования автомашин «Скорой помощи», транспортных средств общего пользования и др. применяют системы, в которых каждому транспортному средству выдается устройство «ГЛОНАСС - навигатор» или «GPS - навигатор». Эти устройства определяют местоположение транспортного средства и по радиоканалу передают координаты диспетчеру, где эти сигналы принимаются и отображаются на карте местности. Таким образом, организуется мониторинг местоположения транспортного средства.
Общеизвестен также способ идентификации объектов по критерию «свой-чужой», широко используемый в авиации. В этом случае каждому своему объекту выдается приемоответчик, который по сигналу РЛС, содержащему кодовый сигнал, отвечает кодовой комбинацией «свой». РЛС должна обеспечить прием этого кодового сигнала и отобразить на дисплее рядом с отметкой подвижного объекта отметку «свой». Такой способ усложняет РЛС, поскольку она должна передавать подвижному объекту кодированный сигнал и иметь канал приема ответного сигнала «свой».
Наиболее близкой по совокупности признаков к предлагаемой системе является «Система обеспечения безопасности и мониторинга мобильных объектов», патент RU №2265531, дата публикации 2005.12.10, (прототип). Система состоит из взаимосвязанных устройств, соединенных электрически или по радиоканалу. Отдельные устройства, выполняющие сходные функции в системе, для удобства объединены в логические блоки.
Указанная система обеспечения безопасности и мониторинга мобильных объектов содержит:
а) блок обнаружения подвижных объектов и анализа фона, далее - блок обнаружения;
б) блок распознавания нарушителей, определения координат, параметров нарушителей и анализа ситуаций, далее - блок распознавания;
в) блок управляемых адресуемых подвижных видеокамер;
г) базу данных, реализованную на вычислительном устройстве с памятью, далее - устройство памяти с библиотекой нарушителей;
д) блок терминалов наблюдения;
е) блок устройств приема/передачи сигнала;
ж) блок транспондеров.
Блок обнаружения представляет собой комплект СО (видеокамер и иных устройств), использующих для обнаружения различные физические принципы:
а) черно-белые видеокамеры;
б) цветные видеокамеры;
в) термовизорные камеры (тепловизоры);
г) радиолокационные устройства;
д) датчики движения и определения координат нахождения подвижного объекта.
Неподвижные видеокамеры обеспечивают обнаружение подвижных объектов, передачу видеосигналов и иных сигналов распознавания в блок распознавания.
Блок распознавания содержит устройство распознавания нарушителей, которое выполнено с возможностью определения координат и параметров объектов, анализа ситуаций. Устройство распознавания объектов реализуется, например, на промышленном компьютере, снабженным специальным программным обеспечением. Блок распознавания соединен с устройством памяти с библиотекой нарушителей, в которой заранее записаны параметры распознавания объектов. В блоке распознавания производится классификация нарушителей (пеший человек, экипированный человек, транспортной средство и др.) с использованием данных библиотеки нарушителей.
Управляемые адресуемые подвижные видеокамеры связаны через интерфейс с устройством обнаружения неподвижной видеокамеры, по сигналам которой производится наведение подвижных видеокамер на нарушителя. Подвижные видеокамеры выполнены с возможностью получения детального укрупненного изображения нарушителя, используемого для более точного распознавания параметров нарушителя.
Блок терминалов наблюдения, включающих не менее одного терминала, выполнен с возможностью анализа результатов и управления системой. Терминалы наблюдения электрически связаны с устройством памяти с библиотекой нарушителей. Терминалы наблюдения представляют собой один или несколько персональных компьютеров, объединенных сетями связи и выполненных с возможностью анализа результатов и управления системой. Терминалы наблюдения обеспечивают оператора возможностью наблюдать за происходящим в зоне контроля системы (зоне обнаружения подвижных объектов) и управлять системой.
Блок устройств приема/передачи сигнала состоит из одного или нескольких устройств приема/передачи сигнала, которые выполнены с возможностью передачи сигнала запроса в транспондеры и получения индивидуальных сигналов (кодов) ответа от транспондеров. Транспондерами оборудованы мобильные объекты, подлежащие мониторингу. Собственный индивидуальный идентификационный сигнал (код) заранее записан в транспондер. Устройство приема/передачи сигнала принимает все индивидуальные идентификационные сигналы (коды) транспондеров и предает их в устройство распознавания объекта.
В устройстве распознавания объектов происходит сравнение всех получаемых индивидуальных идентификационных кодов транспондеров, с кодами, имеющимися в устройстве памяти с библиотекой нарушителей. При несовпадении кодов объекта с кодами библиотеки нарушителей система выдает сигнал тревоги в терминалы наблюдения.
Сходными существенными признаками заявленной системы с вышеупомянутой системой являются: комплект СО, работающих на разных физических принципах: радиолокационных устройств (станций), видеокамер и тепловизоров, устройства обнаружения, устройство распознавания, устройство памяти с библиотекой нарушителей, управляемые адресуемые подвижные видеокамеры (поворотные устройства) и терминалы наблюдения.
Рассмотренная «Системе обеспечения безопасности и мониторинга мобильных объектов» имеет следующие недостатки. В данной системе предусмотрена идентификация мобильных объектов по критерию «свой-чужой» с помощью устройств приема/передачи сигналов и транспондеров. Однако, транспондеры достаточно массивны, чтобы их использовать для идентификации людей по критерию «свой-чужой». Например, французские транспондеры, описанные в статье «Опознавание объектов на поле боя» (http://www.dogswar.ru/armii-mira/vooryjenie/592-opoznavanie-obektov-na-pole,-статья), имеют массу порядка 4 кг. Существенным недостатком указанной системы является наличие всего одного устройства распознавания, которое выполнено с помощью использования промышленного компьютера. Учитывая, что цифровое кодирование в данной системе производится в устройстве распознавания, то можно утверждать, что указанная система будет обладать недостаточной помехоустойчивостью, так как устройства блока распознавания могу быть отнесены от устройства обнаружения на сотни метров и даже километры. Передача аналоговых сигналов на такое расстояние может привести к частым сбоям и искажениям изображения распознаваемого объекта. Построение системы с одним общими устройствами для нескольких других устройств исключает автономное блочное конструктивное исполнение отдельных средств обнаружения, что существенно снижает эксплуатационные возможности средств обнаружения. Если промышленные компьютеры устанавливать на периферии рядом с устройствами блока обнаружения, то это приведет к значительному удорожанию системы, так как потребуется значительное количество достаточно дорогих компьютеров. Устройство памяти с библиотекой нарушителей также представляет собой компьютер, что подтверждает недостатки предлагаемой системы даже при совмещении устройств блока обнаружения и устройств памяти с библиотеками нарушителей на одном компьютере. Практичнее устройство распознавания и устройство памяти с библиотекой нарушителей выполнять на микроконтроллерах с памятью индивидуально для каждого средства обнаружения, что обеспечивает их автономную работу.
Самым значительным недостатком данной системы следует считать отсутствие возможности корректировки оператором системы действий сил охраны из-за отсутствия соответствующих ТС.
Сущность изобретения
Технические результаты, на достижение которых направлено изобретение, заключаются в:
а) классификации подвижных объектов по критерию «свой-чужой»;
б) возможности пресечения действий нарушителя оптимальными силами охраны;
в) упрощении и удешевлении линии связи и повышении помехоустойчивости при передаче видеоинформации с параметрами распознавания нарушителя в малокадровом режиме.
Для достижения технических результатов предлагаемая радиолокационная система охраны объекта с малокадровой системой видеонаблюдения и оптимальной численностью сил охраны содержит:
а) комплект средств обнаружения (СО) в количестве от одного до нескольких СО, работающих на разных физических принципах: радиолокационных станций (РЛС), видеокамер (ВК) и тепловизоров (ТпВ), в любом сочетании при условии наличия в комплекте СО хотя бы одной РЛС, при этом каждое СО содержит: устройство обнаружения, устройство распознавания, устройство памяти с библиотекой нарушителей, управляемое адресуемое поворотное устройство;
б) терминалы наблюдения;
в каждом СО выход устройства обнаружения соединен со входом устройства распознавания, вход/выход которого соединен с первым входом/выходом устройства памяти с библиотекой нарушителей, выходы устройств распознавания РЛС соединены посредством первой линии связи со входами управляемых адресуемых поворотных устройств ВК и ТпВ, которые выполнены с возможностью наведения на нарушителя по командам устройств распознавания РЛС, выходы устройств распознавания ВК и ТпВ соединены со входами устройств обнаружения соответствующих ВК и ТпВ, выполненных с возможностью фокусировки, установки диафрагмы и скорости работы затвора, в состав каждого СО включен адресуемый буфер, первый вход/выход которого соединен со вторым входом/выходом устройства памяти с библиотекой нарушителей, а второй вход/выход подключен к второй линии связи, к которой также подключены входы управляемых адресуемых поворотных устройств РЛС, в состав системы также включены:
а) центральный пульт охраны (ЦПО), содержащий:
- одно или несколько автоматизированных рабочих мест (АРМ) операторов ЦПО,
- коммутатор, выполненный с возможностью подключения к каждому АРМ адресуемых буферов только тех СО, которые совместно работают с соответствующим АРМ;
- стационарный терминал ЦПО, выполненный с возможностью приема координат групп силового реагирования (ГСР);
причем первый вход/выход коммутатора подключен ко второй линии связи, а второй его вход/выход подключен посредством второй линии связи к входам/выходам каждого АРМ и выходу стационарного терминала ЦПО;
б) аппаратура сил охраны, содержащая один или несколько комплектов технических средств групп силового реагирования (ТС ГСР).
В состав каждого АРМ включены: устройство дополнительного распознавания, терминал наблюдения, выполненный с возможностью отображения местоположения нарушителя и ГСР с отметками «свой», а также стационарный терминал АРМ, вход/выход каждого устройства дополнительного распознавания является входом/выходом соответствующего АРМ и подключен к третьей линии связи, выход каждого устройства дополнительного распознавания соединен со входом терминала наблюдения, выход которого соединен со входом соответствующего стационарного терминала АРМ.
Каждый комплект ТС ГСР содержит:
а) мобильный терминал навигатора, выполненный с возможностью передачи по сети сотовой связи GSM координат ГСР в стационарный терминал ЦПО;
б) ГЛОНАСС/GPS - навигатор, выполненный с возможностью высокоточного определения местоположения (координат) ГСР;
в) мобильный терминал радиосвязи, выполненный с возможностью организации по сети сотовой связи GSM дуплексной радиосвязи с операторами АРМ и приема тревожных сообщений от операторов АРМ, передаваемых в автоматическом режиме с указанием номера сработавшего участка рубежа охраны;
г) носимый пульт охраны (НПО), выполненный с возможностью формирования звуковых тревожных сигналов и отображения принятых номеров сработавших участков рубежа охраны в установленном световом формате; причем вход мобильного терминала навигатора соединен с выходом ГЛОНАСС/GPS - навигатора, выход мобильного терминала радиосвязи соединен со входом НПО.
Вторая линия связи является обычной (с полосой пропускания от 3 кГц) двухпроводной линией связи с возможностью передачи видеоинформации с параметрами распознавания нарушителя в малокадровом режиме.
Применение серийно выпускаемых мобильных и стационарных терминалов системы сотовой связи GSM существенно упрощает и удешевляет организацию радиосвязи.
В предлагаемой системе используется общеизвестный способ обмена скорости передачи информации на ширину полосы пропускания канала связи и помехоустойчивость (малокадровая система видеонаблюдения). Суть этого способа заключается в том, что захваченный видеокадр запоминается в адресуемом буфере и далее передается с медленной скоростью в пункт приема, сохраняя при этом хорошее качество изображения и высокую помехоустойчивость. В частности, этот способ применен в «Малокадровой системе видеонаблюдения для контроля протяженных рубежей охраны», патент RU №2517042, дата публикации 2014.05.27. Такое решение позволяет существенно снизить затраты на линии связи, используя обычные (с полосой пропускания от 3 кГц) двухпроводные линии связи для передачи видеоинформации вместо широкополосных и дорогих кабелей.
Осуществление
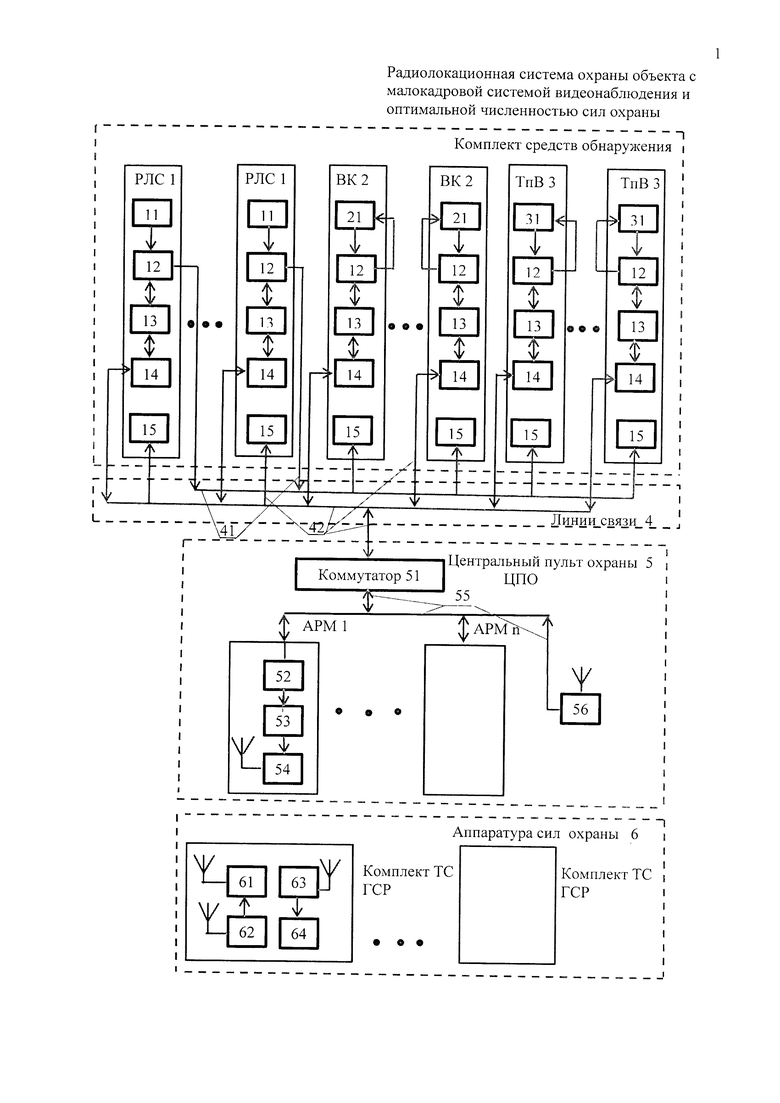
На чертеже приведена структурная схема предлагаемой системы. Однотипные устройства, средства имеют одинаковое обозначение. Система состоит из следующих групп аппаратуры:
а) комплекта СО в составе:
- радиолокационных станций РЛС - 1;
- телевизионных видеокамер ВК - 2;
- тепловизоров ТпВ - 3.
б) линий связи - 4, выполненных с возможностью электрических соединений СО между собой (первая линия связи - 41) и СО - с коммутатором - 51 (вторая линия связи - 42);
в) центрального пульта охраны (ЦПО) - 5;
г) аппаратуры сил охраны - 6.
В предлагаемой системе в качестве основных СО применены РЛС. Тактико-технические характеристики РЛС практически не зависят от погодных условий (туман, густой снегопад, метель, пыльная буря и т.п.), от условий освещенности (день, ночь, тени от облаков и т.п.). РЛС обеспечивают большую и стабильную дальность обнаружения подвижного объекта, простоту в определении дальности до подвижного объекта и его координат. В качестве недостатков следует отметить:
- меньшую разрешающую способность по сравнению с оптическими СО;
- изображение подвижного объекта на терминале отображения не соответствует визуальному виду подвижного объекта, что затрудняет распознавание подвижного объекта оператором. Применение РЛС миллиметрового диапазона длин волн обеспечивает достаточно высокую разрешающую способность и позволяет уверенно распознать большинство подвижных объектов на достаточном расстоянии от РЛС в автоматическом режиме и оператором при определенном навыке работы по распознаванию объектов. В некоторых случаях использование РЛС не требует применения других СО, что существенно удешевляет систему при строительстве и сокращает эксплуатационные расходы. РЛС в зависимости от условий эксплуатации и модели нарушителя, как правило, выбирается с рабочей длиной волны в диапазоне от 8 до 32 мм. Рекомендуется устанавливать не менее двух РЛС с возможностью дублирования работы друг друга и взаимного перекрытия зон контроля для обеспечения повышенной надежности работы системы. Общее количество РЛС определяется площадью охраняемого объекта. РЛС устанавливают так, чтобы обеспечить радиолокационное наблюдение за прилегающей к объекту охраны территорией и территорией самого объекта. Площадь радиолокационного наблюдения, которая обеспечивается одной РЛС, может составлять несколько десятков квадратных километров. РЛС имеет самую низкую удельную стоимость (руб./км2) сигнального блокирования территории объекта по сравнению с другими СО. В состав комплекта СО включены оптические средства: видеокамеры ВК 2 и тепловизоры ТпВ 3. Видеокамеры и тепловизоры соединены с РЛС. Каждая РЛС, к которой подключены видеокамеры и/или тепловизоры, управляет наведением оптических средств на нарушителя. Количество подключенных к РЛС оптических средств и их состав определяется условиями эксплуатации и моделью нарушителя. Оптические средства выполнены с возможностью получения более детального изображения нарушителя для проведения уточненного распознавания и точной его классификации.
Рассмотрим работу СО по структурной схеме.
Каждое СО (РЛС, ВК, ТпВ) включает в свой состав:
а) устройство обнаружения, соответственно - 11,21,31;
б) устройство распознавания, определения координат, параметров объектов-нарушителей и анализа ситуаций, далее - устройство распознавания - 12;
в) устройство памяти с библиотекой нарушителей - 13;
г) адресуемый буфер - 14;
д) управляемое адресуемое поворотное устройство - 15.
Устройство обнаружения 11 из состава РЛС - активное и представляет собой приемо-передающее устройство, выполненное с возможностью зондирования прилегающего пространства электромагнитным излучением сверхвысокой частоты (СВЧ), приема отраженных сигналов, усиления принятых отраженных сигналов, их преобразования в цифровой формат и выделения подвижных объектов с помощью детекторов движения. Устройство обнаружения 21 из состава видеокамеры ВК - пассивное устройство и представляет собой приемное устройство с объективом и инфракрасным фильтром, выполненное с возможностью приема сигналов от объектов в ближнем РЖ диапазоне, усиления принятых сигналов, их преобразования в цифровой формат и выделения подвижных объектов с помощью компьютерного зрения с учетом интенсивности окружающего фона. Устройство обнаружения 31 из состава тепловизора ТпК - пассивное устройство и представляет собой приемное устройство с объективом и германиевой оптикой, выполненное с возможностью приема сигналов от объектов в ближнем ИК диапазоне, усиления принятых сигналов, их преобразования в цифровой формат и выделения подвижных объектов с помощью компьютерного зрения с учетом интенсивности окружающего фона. Наведение оптических СО на нарушителя производится по командам РЛС, с которыми эти СО совместно работают и электрически связаны. Команды наведения подаются от РЛС в управляемые адресуемые поворотные устройства оптических СО по первой линии связи - 41. Каждый объектив оптических СО фокусирует изображение нарушителя на соответствующей светочувствительной матрице, изменяет диафрагмы и скорости работы затвора по командам от собственных устройств распознавания 12, с которыми они соединены интерфейсом по первой линии связи 41.
Подвижный объект становится нарушителем после несанкционированного преодоления им на плане охраняемого объекта виртуального изображения предварительного или основного участка охраняемого рубежа.
Сигналы от нарушителя в цифровом формате из устройств обнаружения подвижного объекта 11, 21, 31 любого СО поступают в соответствующие устройства распознавания 12, связанные электрически с устройством памяти с библиотекой нарушителей 13. Распознавание нарушителей в устройстве распознавания 12 происходит путем поиска по определенному алгоритму в устройстве памяти с библиотекой нарушителей 13 заранее записанных параметров распознавания нарушителей и их сопоставление с параметрами распознавания вновь обнаруженного подвижного объекта. Распознавание и классификация нарушителя производится программным путем, например, с помощью известного последовательного дискриминантного метода (построения гиперплоскостей в многомерном пространстве). Параметры распознавания нового нарушителя с указанием расстояния до него заносятся в устройство памяти с библиотекой нарушителей 13 с возможностью последующего использования этих параметров при распознавании последующих нарушителей. Устройство распознавания 12 и устройство памяти с библиотекой нарушителей 13 реализуются, в отличие от прототипа, на микроконтроллерах, снабженных программным обеспечением, а не на промышленном компьютере, что существенно удешевляет и обеспечивает возможность выполнения средств обнаружения в виде автономных функционально и конструктивно законченных средств (блоков).
Параметры распознавания нарушителя или тревожной ситуации одновременно с записью в устройство памяти с библиотекой нарушителей 13 записываются совместно с изображением нового нарушителя или тревожной ситуации в адресуемый буфер 14 каждого СО. Каждый адресуемый буфер 14 обеспечивает работоспособность в двух режимах: в первом режиме - сохранение отдельных кадров изображения по внешнему сигналу (например, сигналу тревоги), а во втором режиме - непрерывное малокадровое наблюдение по команде оператора. Адресуемый буфер 14 выполнен по схеме циклической перезаписи информации с возможностью адресного выделения нескольких зон памяти для сохранения отдельных изображений (например, кадров предтревожной, тревожной и послетревожной информации). По внешнему сигналу адресуемый буфер 14 приостанавливает процесс циклической перезаписи информации и сохраняет определенные кадры в соответствующих выделенных адресным путем зонах памяти. Далее адресный буфер 14 инициирует процесс последовательной выдачи сохраненных кадров изображения с более медленной частотой (чем частота записи в адресуемый буфер 14) в пункт приема. Второй режим работы отличается от первого тем, что адресуемый буфер 14 обеспечивает непрерывное малокадровое наблюдение по команде оператора, в случае которого адресуемый буфер 14 используется в качестве стековой памяти для последовательного процесса накопления, продвижения по стеку и непрерывной выдаче на выход кадров изображения. При этом адресуемый буфер 14 обеспечивает разные скорости записи и считывания по его входу и выходу. Интенсивность непрерывного малокадрового наблюдения (количество кадров за единицу времени) может также регулироваться оператором.
Различия в работе РЛС и оптических СО имеются в работе управляемых адресуемых поворотных устройств 15.
Управляемое адресуемое поворотное устройство РЛС 15 работает автономно под управлением программы, заложенной в это устройство. Параметры программы:
- угол и скорость вращения антенн РЛС в вертикальной плоскости;
- угол и скорость вращения антенн РЛС в горизонтальной плоскости; могут задаваться и изменяться дистанционно оператором АРМ ЦПО.
Вместо вращения антенн может использоваться сканирование, которое производится электронным способом без применения вращающихся элементов.
Управляемое адресуемое поворотное устройство 15 оптического средства обеспечивает наведение устройства обнаружения (объектива) 21,31 на нарушителя поворотом в вертикальной и горизонтальной плоскостях в соответствии с управляющими командами устройства распознавания 12 соответствующей РЛС.
Работу центрального пульта охраны (ЦПО) 5 рассмотрим по структурной схеме чертежа. ЦПО включает в свой состав:
а) коммутатор -51;
б) автоматизированные рабочие места (АРМ) операторов системы APM1-APMn. Каждый АРМ включает в свой состав:
- устройство дополнительного распознавания - 52;
- терминал наблюдения - 53;
- стационарный терминал системы сотовой связи GSM, выполненный с возможностью связи с силами охраны, далее - стационарный терминал АРМ -54;
в) третью линию связи - 55;
г) стационарный терминал системы сотовой связи GSM, выполненный с возможностью связи с ГЛОНАСС/GPS - навигатором системы глобального позиционирования из комплекта ТС ГСР, далее - стационарный терминал ЦПО -56.
Изображения нарушителей с параметрами распознавания от адресуемых буферов 14 РЛС, видеокамер и тепловизоров за счет использования малокадровой системы наблюдения передаются по обычной (с полосой пропускания от 3 кГц) двухпроводной второй линии связи - 42 в коммутатор 51 ЦПО.
В коммутаторе 51 информация от СО распределяется по третьей линии связи 55 в устройства дополнительного распознавания 52 тех АРМ, с которыми СО предназначены для совместной работы. В устройстве дополнительного распознавания 52 поступившие сигналы подвергаются дополнительной обработке по распознаванию и классификации нарушителей. Простейшим алгоритмом дополнительного распознавания может служить алгоритм мажоритарности. После дополнительного распознавания и уточненной классификации нарушителя может появиться необходимость корректировки параметров распознавания и классификации в устройствах памяти с библиотеками нарушителей 13 соответствующих СО. Параметры корректировки направляются в соответствующие устройства памяти с библиотеками нарушителей 13 через адресуемый буфер 14 соответствующего СО, а результаты уточненной классификации и изображения нарушителей или их отметки - на терминалы наблюдения 53 АРМ. Программа может привлекать внимание оператора или оператор может самостоятельно принимать участие в дополнительном распознавании и уточненной классификации нарушителя. Решение оператора имеет наивысший приоритет. Таким образом, организуется самообучение СО при автоматическом распознавании нарушителя, или обучение СО при участии в распознавании оператора. На карте местности и плане объекта, отображаемых на терминалах наблюдения 53, оператор терминала наносит виртуальные рубежи охраны по периметру объекта и рубежи предупреждения, а также границы внутренних охраняемых зон. Рубежи предупреждения наносятся перед основными рубежами охраны с наружной стороны периметра объекта или зоны. Терминалы наблюдения 53 представляют собой видеомониторы компьютеров (персональные ЭВМ или ноутбуки). Каждый терминал наблюдения 53 выполнен с возможностью наблюдения ситуации на экране и доступа оператора к управлению системой через клавиатуру или другой специализированный интерфейс типа человек-компьютер, например, джойстик. Для каждого подвижного объекта, который появляется в зоне обнаружения РЛС, компьютер отображает на соответствующем терминале наблюдения 53 трассу движения подвижного объекта, например, мигающим черным цветом. При несанкционированном пересечении подвижным объектом рубежа предупреждения выдается звуковой сигнал предупреждения, трасса подвижного объекта становится трассой нарушителя и отображается, например, мигающим красным цветом. При пересечении нарушителем основного рубежа охраны или границы внутренней охраняемой зоны в терминале наблюдения формируется тревожный звуковой сигнал, отличающийся по формату от предупреждающего сигнала. Трасса нарушителя продолжает отображаться прерывистым красным мигающим цветом.
Аппаратура сил охраны представлена на чертеже комплектами ТС одной или нескольких ГСР1-ГСРn. Состав и численность сил охраны определяется особенностями объекта и условиями охраны. Комплект ТС каждой ГСР в свой состав включает:
а) мобильный терминал сети сотовой связи GSM (далее - мобильный терминал навигатора - 61), выполненный с возможностью передачи координат ГСР в стационарный терминал ЦПО 56;
б) навигатор системы глобального позиционирования ГЛОНАСС/GPS (далее - ГЛОНАСС/GPS - навигатор - 62), выполненный с возможностью высокоточного определения местонахождения (координат) ГСР;
в) мобильный терминал сети сотовой связи GSM (далее - мобильный терминал радиосвязи - 63), выполненный с возможностью организации по сети дуплексной радиосвязи с оператором соответствующего АРМ ЦПО и приема тревожных сообщений от операторов АРМ, передаваемых в автоматическом режиме с указанием номера сработавшего участка рубежа охраны;
г) носимый пульт охраны (НПО) - 64, выполненный с возможностью формирования звуковых тревожных сигналов и отображения принятых номеров сработавших участков рубежа охраны в установленном световом формате.
Система выполнена с возможностью управления ГСР голосовыми командами оператора соответствующего АРМ ЦПО по радиоканалу, образованному стационарным терминалом АРМ оператора и мобильным терминалом ГСР. Оператор располагает сведениями о нарушителе (пеший человек, экипированный человек, группа людей, направление и скорость движения и т.п.). Команды формируются оператором на основе анализа положения нарушителя и ГСР на плане объекта, отображаемого на терминале наблюдения. В этом случае, имея данные об объекте-нарушителе, трассе его движения нет необходимости превентивного блокирования критически важных объектов дополнительными силами охраны. Оператор, наводя ГСР на нарушителя, обеспечивает возможность пресечения действий нарушителя за минимальное время минимальными силами охраны.
При получении тревожного звукового сигнала оператор передает голосовое тревожное сообщение по радиоканалу связи от стационарного терминала 54 АРМа в мобильный терминал радиосвязи 63 ГСР. Одновременно с голосовым сообщением терминал наблюдения 53 автоматически по тому же радиоканалу связи передает тревожное сообщение. Мобильный терминал радиосвязи 63 связан с НПО 64 комплекта ТС ГСР. В этом пульте формируется звуковой тревожный сигнал и световые сигналы с указанием номера сработавшего участка рубежа охраны в установленном формате.
Стационарный терминал ЦПО 56 обеспечивает прием координат ГСР от мобильного терминала навигатора 61 комплекта ТС ГСР. Принятые сигналы от стационарного терминала ЦПО 55 подаются в устройство дополнительного распознавания 52 по третьей линии связи 55. Применение системы глобального позиционирования ГЛОНАСС/GPS существенно упрощает и удешевляет систему идентификации подвижных объектов по критерию «свой-чужой», так как возможно использование массово выпускаемых изделий для решения этой задачи.
По сигналу тревоги ГСР выдвигается для пресечения действий нарушителя. В этой группе должно быть не менее одного ГЛОНАСС/GPS - навигатора 62, который с помощью мобильного терминала навигатора 61 передает координаты местоположения ГСР в стационарный терминал ЦПО 56. Стационарный терминал ЦПО передает принятые координаты ГСР в автоматизированное рабочее место (АРМ) оператора, где на терминале наблюдения 53 рядом с отметкой ГСР отображается отметка «свой», которая все время сопровождает отметку ГСР. Отметка «чужой» на терминале наблюдения 53 не отображается. Трассы объекта-нарушителя и сотрудников охраняемого объекта на терминале наблюдения 53 отображаются различными цветами (например, трасса нарушителя - красным цветом, сотрудника - синим), что облегчает работу оператора. Трасса ГСР то же выделяется цветом (например, зеленым), но для большей надежности рядом с изображением или отметкой ГСР отображается отметка «свой» тем же цветом, что и ГСР.
Координаты ГСР также поступают по третьей линии связи 55 в устройство дополнительного распознавания 52, которое представляет собой вычислительное устройство с памятью (компьютер) и, после соответствующей обработки, - в терминал наблюдения 53. Рядом с отметкой ГСР отображается отметка «свой», которая непрерывно сопровождает отображение ГСР на экране терминала наблюдения 53. Таким образом, оператор имеет сведения о местоположении нарушителя и ГСР. Оператор с помощью голосовых команд по радиоканалу, образованному мобильным терминалом радиосвязи 63 и стационарным терминалом АРМ 54, обеспечивает наведение ГСР на нарушителя для скорейшего пресечения его действий.
В предлагаемой системе охраны оптимальная численность сил охраны достигается за счет:
- заблаговременного обнаружения и распознавания нарушителя РЛС;
- наведения ГСР на нарушителя оператором.
При этом можно обойтись минимальным количеством сил охраны, так как нет необходимости превентивного блокирования критически важных объектов дополнительными силами охраны (патрулями, часовыми, резервными ГСР).
Существенное упрощение и удешевление второй 42 линии связи и повышение помехоустойчивости достигается за счет применения обычной (с полосой пропускания от 3 кГц) двухпроводной линии связи, обеспечивающей передачу видеоинформации с параметрами распознавания нарушителя в малокадровом режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационно-лучевая система охраны периметров протяженных объектов и контроля за прилегающей территорией | 2019 |
|
RU2724805C1 |
| Радиолокационный комплекс раннего обнаружения нарушителей для охраны объекта | 2018 |
|
RU2695412C1 |
| Радиолокационно-лучевая система охраны периметров протяженных объектов | 2019 |
|
RU2720552C1 |
| Малообслуживаемая система физической защиты объектов | 2018 |
|
RU2708509C1 |
| МАЛОКАДРОВАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2012 |
|
RU2517042C2 |
| Малокадровая система видеонаблюдения для контроля протяженных рубежей охраны | 2017 |
|
RU2639051C1 |
| Комбинированный комплекс физической защиты объектов, территорий и прилегающих акваторий с автоматизацией процессов охраны для сокращения численности людских ресурсов по его обслуживанию | 2021 |
|
RU2792588C1 |
| Автономный мобильный комплекс видео-тепловизионного наблюдения | 2018 |
|
RU2671155C1 |
| Интегрированная система безопасности на основе автоматизированных функциональных систем и подсистем | 2022 |
|
RU2794559C1 |
| МАЛОКАДРОВАЯ МОБИЛЬНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ | 2012 |
|
RU2504015C1 |
Изобретение относится к области охранной сигнализации, а более конкретно к системам охраны объектов и их периметров. Технические результаты, на достижение которых направлено изобретение, заключаются в классификации подвижных объектов по критерию «свой-чужой», в упрощении линии связи и повышении помехоустойчивости при передаче видеоинформации с параметрами распознавания нарушителя в малокадровом режиме. Система состоит из следующих групп аппаратуры: комплекта средств обнаружения, работающих на разных физических принципах (радиолокационных станций, видеокамер и тепловизоров), линий связи, центрального пульта охраны (ЦПО), а также аппаратуры сил охраны, содержащей один или несколько комплектов технических средств групп силового реагирования (ТС ГСР), автоматизированных рабочих мест (АРМ) операторов в составе ЦПО, коммутатора и стационарного терминала ЦПО. Каждое АРМ содержит устройство дополнительного распознавания, терминал наблюдения и стационарный терминал АРМ. Каждый комплект ТС ГСР содержит мобильный терминал навигатора, ГЛОНАСС/GPS-навигатор, мобильный терминал радиосвязи и носимый пульт охраны. 3 з.п. ф-лы, 1 ил.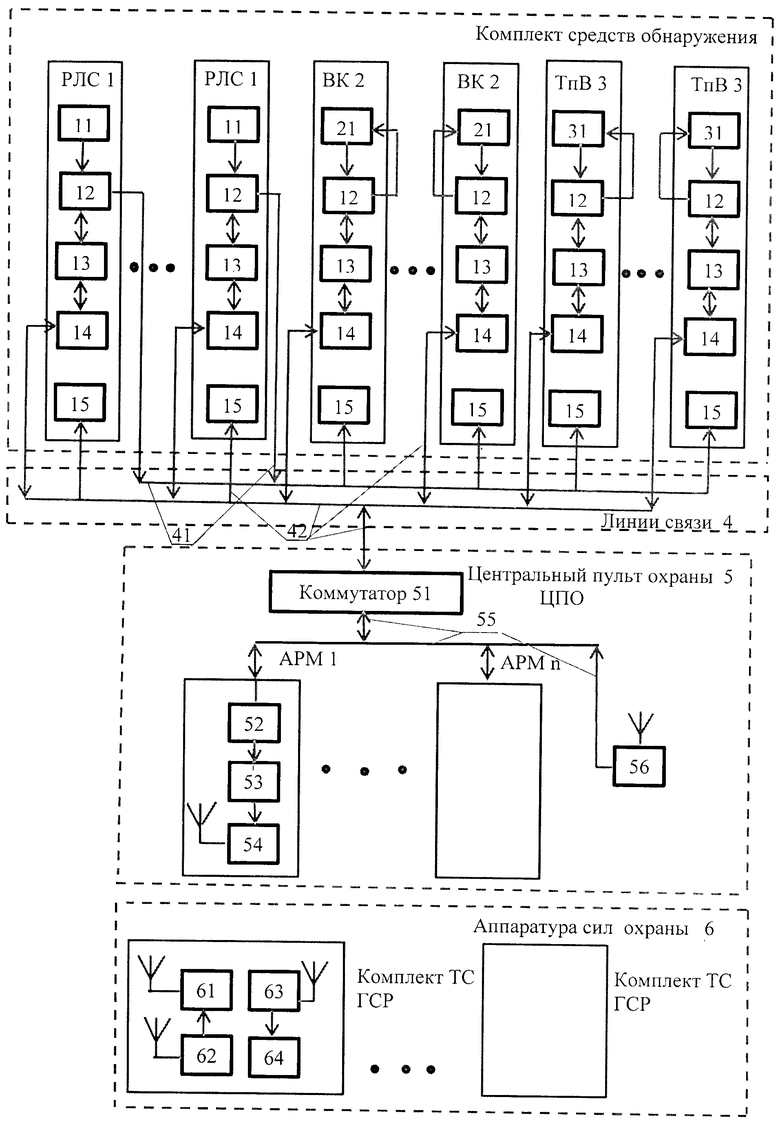
1. Радиолокационная система охраны объекта с малокадровой системой видеонаблюдения и оптимальной численностью сил охраны, содержащая:
а) комплект средств обнаружения (СО) в количестве от одного до нескольких СО, работающих на разных физических принципах: радиолокационных станций (РЛС), видеокамер (ВК) и тепловизоров (ТпВ), в любом сочетании при условии наличия в комплекте СО хотя бы одной РЛС, при этом каждое СО содержит: устройство обнаружения, устройство распознавания, устройство памяти с библиотекой нарушителей, управляемое адресуемое поворотное устройство;
б) терминалы наблюдения;
в каждом СО выход устройства обнаружения соединен с входом устройства распознавания, вход/выход которого соединен с первым входом/выходом устройства памяти с библиотекой нарушителей, выходы устройств распознавания РЛС соединены посредством первой линии связи с входами управляемых адресуемых поворотных устройств ВК и ТпВ, которые выполнены с возможностью наведения на нарушителя по командам устройств распознавания РЛС, выходы устройств распознавания ВК и ТпВ соединены с входами устройств обнаружения соответствующих ВК и ТпВ, выполненных с возможностью фокусировки, установки диафрагмы и скорости работы затвора, отличающаяся тем, что в состав каждого СО включен адресуемый буфер, первый вход/выход которого соединен со вторым входом/выходом устройства памяти с библиотекой нарушителей, а второй вход/выход подключен ко второй линии связи, к которой также подключены входы управляемых адресуемых поворотных устройств РЛС, в состав системы также включены:
а) центральный пульт охраны (ЦПО), содержащий:
- одно или несколько автоматизированных рабочих мест (АРМ) операторов ЦПО,
- коммутатор, выполненный с возможностью подключения к каждому АРМ адресуемых буферов только тех СО, которые совместно работают с соответствующим АРМ;
- стационарный терминал ЦПО, выполненный с возможностью приема координат групп силового реагирования (ГСР);
причем первый вход/выход коммутатора подключен ко второй линии связи, а второй его вход/выход подключен посредством второй линии связи к входам/выходам каждого АРМ и выходу стационарного терминала ЦПО;
б) аппаратура сил охраны, содержащая один или несколько комплектов технических средств групп силового реагирования (ТС ГСР).
2. Радиолокационная система по п. 1, отличающаяся тем, что в состав каждого АРМ включены: устройство дополнительного распознавания, терминал наблюдения, выполненный с возможностью отображения местоположения нарушителя и ГСР с отметками «свой», а также стационарный терминал АРМ, вход/выход каждого устройства дополнительного распознавания является входом/выходом соответствующего АРМ и подключен к третьей линии связи, выход каждого устройства дополнительного распознавания соединен с входом терминала наблюдения, выход которого соединен с входом соответствующего стационарного терминала АРМ.
3. Радиолокационная система по п. 1 отличающаяся тем, что каждый комплект ТС ГСР содержит:
а) мобильный терминал навигатора, выполненный с возможностью передачи по сети сотовой связи GSM координат ГСР в ЦПО;
б) ГЛОНАСС/GPS-навигатор, выполненный с возможностью высокоточного определения местоположения (координат) ГСР;
в) мобильный терминал радиосвязи, выполненный с возможностью организации по сети сотовой связи GSM дуплексной радиосвязи с операторами АРМ и приема тревожных сообщений от операторов АРМ, передаваемых в автоматическом режиме с указанием номера сработавшего участка рубежа охраны;
г) носимый пульт охраны (НПО), выполненный с возможностью формирования звуковых тревожных сигналов и отображения принятых номеров сработавших участков рубежа охраны в установленном световом формате, причем вход мобильного терминала навигатора соединен с выходом ГЛОНАСС/GPS-навигатора, выход мобильного терминала радиосвязи соединен с входом НПО.
4. Радиолокационная система по п. 1, отличающаяся тем, что вторая линия связи является обычной (с полосой пропускания от 3 кГц) двухпроводной линией связи с возможностью передачи видеоинформации с параметрами распознавания нарушителя в малокадровом режиме.
| СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ И МОНИТОРИНГА МОБИЛЬНЫХ ОБЪЕКТОВ | 2003 |
|
RU2265531C2 |
| СИСТЕМА И СПОСОБ АВТОМАТИЗИРОВАННОГО ВИДЕОНАБЛЮДЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ И СИТУАЦИЙ | 2003 |
|
RU2268497C2 |
| ЗАКРЫВАЮЩЕЕ СРЕДСТВО | 2004 |
|
RU2310960C2 |
| СПОСОБ ВИДЕОНАБЛЮДЕНИЯ ОТКРЫТОГО ПРОСТРАНСТВА С КОНТРОЛЕМ ПОЖАРНОЙ ОПАСНОСТИ | 2013 |
|
RU2534827C2 |
| СПОСОБ НАБЛЮДЕНИЯ ЗА ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСОЙ И СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2008 |
|
RU2523167C2 |
| US 6985172 B1, 10.01.2006 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 6504479 B1, 07.01.2003. | |||

