Изобретение относится к нелинейной радиолокации и может быть использовано для дистанционного обнаружения и распознавания объектов, находящихся вне зоны визуального наблюдения.
Известны способы и устройства дистанционного обнаружения объектов, использующие нелинейные способы и устройства радиолокации (НРЛ) [1, 2, 3], где основными элементами устройств являются нелинейные рассеиватели энергии (HP) (высокочастотные полупроводниковые радиодетали, точечные и плоскостные металлические контакты деталей), имеющиеся (или специально размещенные) в объекте поиска.
При облучении объекта поиска зондирующим сигналом нелинейный рассеиватель переизлучает в пространство сигнал на частотах высших гармоник и субгармоник зондирующего сигнала.
Таким образом, факт регистрации приемником поисковой системы сигнала отклика на частотах высших гармоник и субгармоник зондирующего сигнала говорит о нахождении в области облучения нелинейного рассеивателя или нелинейного пассивного маркера (НМ).
Существенными недостатками указанных способов и устройств являются незначительная (до 30 м) дальность обнаружения объектов поиска и слабая помехозащищенность из-за малого коэффициента преобразования мощности принятого зондирующего сигнала в сигналы его высших гармоник и субгармоник (слабого пассивного сигнала отклика), а также невозможность идентификации (распознавания) объектов поиска.
Использование HP в параметрических рассеивателях [4, 5, 6], повышающих на один-два порядка эффективность преобразования энергии входного сигнала, увеличивает мощность сигнала отклика, что несколько увеличивает дальность обнаружения объектов поиска (менее 100 м) и помехозащищенность.
Увеличение дальности обнаружения HP за счет значительного повышения мощности зондирующего сигнала или чувствительности приемника поисковой системы приводит к ухудшению электромагнитной совместимости, повышению опасности для операторов и ухудшению помехозащищенности.
В качестве прототипа предлагаемого изобретения выбрано техническое решение [6], которое может быть использовано в поисковых системах, например в системе обнаружения жертв кораблекрушения.
В случае сигнала бедствия поисковая система излучает в пространство зондирующий сигнал, принимаемый объектом поиска с HP, который возбуждает в нелинейном маркере - субгармоническом параметрическом рассеивателе колебания на половинной частоте зондирующего сигнала, излучаемые в пространство и принимаемые поисковой системой, что позволяет обнаружить объект поиска и по направлению приемной антенны поисковой системы - его направление.
Устройство-прототип состоит из поисковой системы, расположенной на подвижном водном или воздушном носителе и состоящей из генератора зондирующего сигнала, подсоединенного к излучающей антенне, настроенных на частоту зондирующего сигнала, приемной антенны и присоединенного к ней приемника, настроенных на половинную частоту зондирующего сигнала, и нелинейного маркера, расположенного на объекте поиска.
Нелинейный маркер - субгармонический параметрический рассеиватель состоит из приемной и передающей антенн, настроенных, соответственно, на частоту зондирующего сигнала и его половинную частоту, и двух параметрических генераторов, настроенных на половинную частоту зондирующего сигнала.
Параметрический генератор представляет собой параметрический колебательный контур, состоящий из индуктивности и HP, имеющего нелинейную емкость, в качестве которой может быть использован полупроводниковый диод.
Недостатки прототипа те же, что и у аналогов, хотя дальность обнаружения и помехозащищенность прототипа несколько увеличены.
Достигаемым техническим результатом предлагаемого изобретения является существенное (на один-два порядка) увеличение дальности обнаружения объектов поиска с нелинейными маркерами при повышении помехозащищенности и возможность распознавания объектов поиска.
Дополнительным техническим результатом является возможность оповещения о начале поиска объекта.
В предложенном способе так же, как и в прототипе, поисковая система облучает объект поиска, содержащего нелинейный рассеиватель, зондирующим сигналом на частоте f0 и получает отклик на другой частоте. Однако в предложенном способе зондирующий сигнал и сигнал отклика кодируются и декодируются, а нелинейный рассеиватель, в отличие от прототипа, преобразует высокочастную энергию принятого зондирующего сигнала в энергию постоянного напряжения для включения активного сигнала отклика на частоте f0+Δf, где Δ<<f0.
Предложенный способ может быть реализован устройством, обеспечивающим достижение указанного технического результата за счет того, что в известное устройство, состоящее из поисковой системы (ПС), расположенной на подвижном носителе и включающей антенну (А), передающее устройство (ПУ), выход которого соединен с входом-выходом антенны, и приемник (Пр), и нелинейного маркера (НМ), расположенного на объекте поиска и включающего антенну (А), передающее устройство (ПУ), выход которого соединен с входом-выходом антенны, и нелинейный рассеиватель (HP), в ПС дополнительно включены полосовой фильтр (ПФ) и индикатор (И), причем вход ПФ соединен с входом-выходом А, а выход через Пр - с входом И, а в НМ дополнительно введены полосовой фильтр (ПФ), дешифратор кодовых посылок (ДКП), ключ (Кл), аккумулятор (Ак) и индикатор (И), причем вход ПФ соединен с входом-выходом А, а выход - с первым входом ДКП и входом HP, выход которого соединен со вторым входом ДКП, выход которого соединен с первым входом Кл, второй вход Кл - с выходом Ак, а выход - со входами ПУ и И. Кроме того, ПУ ПС и ПФ НМ настроены на частоту f0, ПУ НМ, ПФ ПС - на частоту f0+Δf, где Δf<<f0, оба ПУ содержат формирователи кодовых посылок, Пр содержит дешифратор кодовых посылок, а обе антенны являются приемно-передающими с полосой пропускания от f0 до f0+Δf и соединены между собой по радиоканалу.
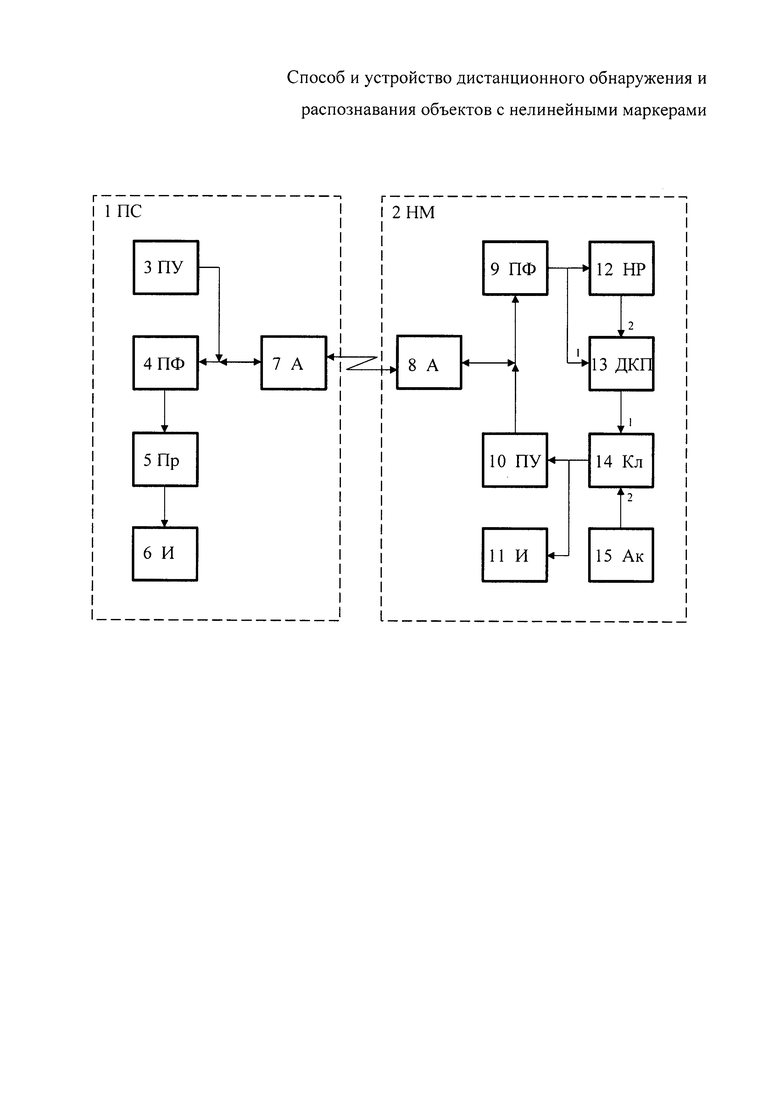
На фигуре представлена структурная схема предлагаемого устройства, где обозначено:
1 - поисковая система (ПС);
2 - нелинейный маркер (НМ);
3 - передающее устройство (ПУ);
4 - полосовой фильтр (ПФ);
5 - приемник (Пр);
6 - индикатор (И);
7 - антенна (А);
8 - антенна (А);
9 - полосовой фильтр (ПФ);
10 - передающее устройство (ПУ);
11 - индикатор (И);
12 - нелинейный рассеиватель (HP);
13 - дешифратор кодовых посылок (ДКП);
14 - ключ (Кл);
15 - аккумулятор (Ак).
Устройство дистанционного обнаружения и распознавания объектов с нелинейными маркерами состоит из поисковой системы ПС 1, расположенной на подвижном носителе, включающей передающее устройство ПУ 3, полосовой фильтр ПФ 4, приемник Пр 5, индикатор И 6 и антенну А 7, причем вход-выход А 7 соединен с выходом ПУ 3 и входом ПФ 4, выход которого через Пр 5 соединен с входом И, и нелинейный маркер НМ 2, расположенный на объекте поиска, включающий антенну А 8, полосовой фильтр ПФ 9, передающее устройство ПУ 10, индикатор И 11, нелинейный рассеиватель HP 12, дешифратор кодовых посылок ДКП 13, ключ Кл 14 и аккумулятор Ак 15, причем вход-выход А 8 соединен с выходом ПУ 10 и входом ПФ 9, выход которого соединен с первым входом ДКП 13 и через HP 12 - со вторым входом ДКП 13, первый вход Кл 14 соединен с выходом ДКП 13, второй - с выходом Ак 15, а выход - с входами ПУ 10 и И 11.
При этом ПУ 3 и ПФ 9 настроены на частоту f0, ПУ 13, ПФ 4 и Пр 5 - на частоту f0+Δf, где Δf<<f0, ПУ 3 и ПУ 10 включают в себя формирователи кодовых посылок, а Пр 5 - дешифратор кодовых посылок, а А 7 и А 8 являются приемно-передающими с полосой пропускания от f0 до f0+Δf и соединены между собой по радиоканалу.
Устройство работает следующим образом.
ПУ 3 излучает через А 7 зондирующий сигнал в виде кодовой последовательности импульсов с несущей частотой f0, который проходит через А 8 и ПФ 9 на вход HP 12 и первый вход ДКП 13. HP 12 преобразует энергию принятого высокочастотного зондирующего сигнала в энергию постоянного напряжения, подаваемого на второй вход ДКП 13. ДКП 13 при наличии питающего напряжения от HP 12 и известной кодовой посылки от ПФ 9 подключает Ак 15 через Кл 14 к ПУ 10 и И 11 (световой диод). Включение И 11 свидетельствует о начале поиска объекта.
ПУ 10 начинает формировать ответную кодовую посылку на частоте f0+Δf, которая через А 8 и А7 поступает через ПФ 4 на Пр 5 и далее на И 6. Показания И 6 содержат информацию о направлении и дальности объекта поиска и его распознавании (по ответным кодовым посылкам или по величине Δf, которые для каждого объекта могут быть различными).
Таким образом, использование в предложенных способе и устройстве HP как преобразователя высокочастотной энергии принятого зондирующего сигнала в энергию постоянного напряжения для формирования более мощного, активного сигнала отклика благодаря введенным ПУ 10, ДКП 13 и Ак 15, кодирование и декодирование зондирующего сигнала и сигнала отклика, использование двух (вместо четырех, как в прототипе) приемно-передающих антенн с полосой пропускания f0+Δf, где Δf<<f0, позволило существенно увеличить дальность обнаружения объектов поиска с нелинейными маркерами, повысить помехозащищенность способа и устройства, а также обеспечить распознавание объектов поиска.
Источники информации
1. Г.Н. Щербаков. Применение нелинейной радиолокации для дистанционного обнаружения малоразмерных объектов. Специальная техника, 1999, №1, с. 34-39.
2. Н.Ю. Бабанов и др. Об использовании эффекта нелинейного рассеяния радиоволн при поиске терпящих бедствие на воде. Радиотехника и электроника, 2000, т. 45, №6, с. 676.
3. Нелинейная радиолокация. Сборник статей, часть 2. Под ред. А.А. Горбачева и др., Радиотехника, 2006.
4. А.В. Иванов и др. Параметрический метод обнаружения объектов с нелинейными рассеивателями. Известия вузов. Сер. Радиоэлектроника, 2003, №9-10, с. 11-16.
5. Нелинейный пассивный маркер - параметрический рассеиватель. Патент РФ №2336538, G01S 13/74, опубл. 20.10.2008, бюл. №29.
6. Субгармонический параметрический рассеиватель. Патент РФ №2495450, G01S 13/74, опубл. 10.10.2013, бюл. №28.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТРЕХМЕРНОЙ ПУТЕВОЙ НАВИГАЦИИ В АВТОМАТИЗИРОВАННОЙ ПОМОЩИ УПРАВЛЕНИЕМ ГРУЗО-ПОДЪЕМНО-ТРАНСПОРТНЫМИ МЕХАНИЗМАМИ | 2018 |
|
RU2727325C2 |
| Способ и устройство обнаружения радиоуправляемых взрывных устройств с применением беспилотного летательного аппарата | 2018 |
|
RU2745658C2 |
| СПОСОБ И УСТРОЙСТВО НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ | 2011 |
|
RU2474839C1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ОБНАРУЖЕНИЯ ИСПОЛНИТЕЛЬНЫХ РАДИОЭЛЕКТРОННЫХ УСТРОЙСТВ УПРАВЛЕНИЯ ВЗРЫВОМ | 2003 |
|
RU2251708C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ДВУХЧАСТОТНОМ НЕЛИНЕЙНОМ РАДИОЛОКАТОРЕ | 2016 |
|
RU2621319C1 |
| ОБНАРУЖИТЕЛЬ ОБЪЕКТОВ, СОДЕРЖАЩИХ НЕЛИНЕЙНЫЕ ЭЛЕМЕНТЫ | 2012 |
|
RU2513712C2 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТОВ ПОИСКА, СОДЕРЖАЩИХ МЕТАЛЛИЧЕСКИЕ КОНТАКТЫ, В НЕЛИНЕЙНЫХ РАДИОЛОКАТОРАХ БЛИЖНЕГО ДЕЙСТВИЯ | 2016 |
|
RU2614038C1 |
| РАДИОКОМПЛЕКС РОЗЫСКА МАРКЕРОВ | 1994 |
|
RU2108596C1 |
| БОРТОВОЙ ОБНАРУЖИТЕЛЬ С КОМПЕНСАЦИЕЙ ВАРИАЦИЙ МАГНИТНЫХ ПОЛЕЙ | 2019 |
|
RU2710363C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВУХКОНТУРНЫХ ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2010 |
|
RU2455659C2 |
Изобретение относится к нелинейной радиолокации и может быть использовано для дистанционного обнаружения и распознавания объектов, находящихся вне зоны визуального наблюдения. Достигаемый технический результат - увеличение дальности обнаружения объектов поиска с нелинейными маркерами при повышении помехозащищенности и возможность распознавания объектов поиска. Сущность способа заключается в том, что поисковая система облучает объект поиска с нелинейным маркером зондирующим сигналом на частоте f0 и получает отклик на частоте f0+Δf, где Δf<<f0. При этом зондирующий сигнал и сигнал отклика кодируются и декодируются, а нелинейный рассеиватель, входящий в состав нелинейного маркера, преобразует высокочастную энергию принятого зондирующего сигнала в энергию постоянного напряжения для включения активного сигнала отклика на частоте f0+Δf. Реализующее указанный способ устройство состоит из поисковой системы, содержащей передающее устройство, полосовой фильтр, приемник, индикатор и антенну с соответствующими связями, и нелинейного маркера, содержащего антенну, полосовой фильтр, передающее устройство, индикатор, нелинейный рассеиватель, дешифратор кодовых посылок, ключ и аккумулятор с соответствующими связями. При этом передающее устройство поисковой системы и полосовой фильтр нелинейного маркера настроены на частоту f0, передающее устройство нелинейного маркера, полосовой фильтр поисковой системы и приемник - на частоту f0+Δf, оба передающих устройства содержат формирователи кодовых посылок, приемник содержит дешифратор кодовых посылок, а обе антенны являются приемно-передающими с полосой пропускания от f0 до f0+Δf и соединены между собой по радиоканалу. 2 н.п. ф-лы, 1 ил.
1. Способ дистанционного обнаружения и распознавания объектов с нелинейными маркерами, заключающийся в облучении объекта поиска зондирующим сигналом на несущей частоте f0 и получении отклика на другой частоте, отличающийся тем, что нелинейный маркер производит преобразование высокочастотной энергии принятого зондирующего сигнала в энергию постоянного напряжения для включения мощного активного сигнала отклика на частоте f0+Δf, где Δf<<f0, а зондирующий сигнал и сигнал отклика кодируются и декодируются.
2. Устройство дистанционного обнаружения и распознавания объектов с нелинейными маркерами, состоящее из поисковой системы (ПС), расположенной на подвижном носителе и включающей антенну (А), передающее устройство (ПУ), выход которого соединен с входом-выходом антенны, и приемник (Пр), и нелинейного маркера (НМ), расположенного на объекте поиска и включающего антенну (А), передающее устройство (ПУ), выход которого соединен с входом-выходом антенны, и нелинейный рассеиватель (HP), отличающееся тем, что в ПС дополнительно введены полосовой фильтр (ПФ) и индикатор (И), причем вход ПФ соединен с входом-выходом А, а выход - через Пр со входом И, а в НМ дополнительно введены полосовой фильтр (ПФ), дешифратор кодовых посылок (ДКП), ключ (Кл), аккумулятор (Ак) и индикатор (И), причем вход ПФ соединен с входом-выходом А, а выход - с первым входом ДКП и входом HP, выход которого соединен со вторым входом ДКП, выход которого соединен с первым входом Кл, второй вход Кл - с выходом Ак, а выход - со входами ПУ и И, при этом ПУ ПС и ПФ НМ настроены на частоту f0, ПУ НМ, ПФ ПС и Пр - на частоту f0+Δf, где Δf<<f0, оба ПУ содержат формирователи кодовых посылок, Пр содержит дешифратор кодовых посылок, а обе антенны являются приемно-передающими с полосой пропускания от f0 до f0+Δf и соединены между собой по радиоканалу.
| СУБГАРМОНИЧЕСКИЙ ПАРАМЕТРИЧЕСКИЙ РАССЕИВАТЕЛЬ | 2012 |
|
RU2495450C1 |
| СПОСОБ И УСТРОЙСТВО МАРКИРОВКИ ОБЪЕКТОВ ПРИ ПОМОЩИ ЭЛЕКТРОННОГО НОМЕРА-ПЛОМБЫ, ОСУЩЕСТВЛЯЮЩЕЙ ИНФОРМАЦИОННЫЙ ОБМЕН СО СЧИТЫВАЮЩИМ УСТРОЙСТВОМ С ИСПОЛЬЗОВАНИЕМ СЕКРЕТНОГО КОДИРОВАНИЯ НА ОСНОВЕ АСИММЕТРИЧНЫХ КЛЮЧЕЙ | 2009 |
|
RU2408896C1 |
| МАРКЕР - СУБГАРМОНИЧЕСКИЙ ПАРАМЕТРИЧЕСКИЙ РАССЕИВАТЕЛЬ | 2012 |
|
RU2496123C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАРКЕРОВ - ПАРАМЕТРИЧЕСКИХ РАССЕИВАТЕЛЕЙ | 2010 |
|
RU2441253C1 |
| Устройство для непосредственного определения расстояния до места короткого замыкания на линии с ответвлениями | 1972 |
|
SU479058A1 |
| WO 2010034933 A1, 01.04.2010 | |||
| US 7596228 B2, 29.09.2009. | |||

