Изобретение относится к области радиолокации и может быть использовано при разработке мобильных нелинейных радаров для дистанционного обнаружения исполнительных радиоэлектронных устройств управления взрывом.
Известны нелинейные радары [Андреев Г.А., Потапов А.А. Миллиметровые волны в радиолокации. Системы индикации цели. Зарубежная радиоэлектроника, №11, 1984 г., и патент США №4053891, G 01 S 9/02, 1977 г.], которые содержат последовательно соединенные задающий генератор, усилитель мощности, фильтр нижних частот и передающую антенну, а также последовательно соединенные приемную антенну, полосовой фильтр, приемник и индикаторное устройство, при этом второй вход усилителя мощности через последовательно соединенные модулятор и синхронизатор подключен ко второму входу приемника.
Приведенные выше нелинейные радары имеют небольшую дальность обнаружения объектов с нелинейными рассеивателями, так как полезный сигнал, поступающий на вход приемной антенны, имеет уровень мощности меньше мощности зондирующего сигнала примерно на 150 дБ [Harger R. О. Harmonic Radar Systems for Near - Ground In Foliage Nonlinear Scalterers. - Trans. Aerospace and Electronic Systems, 1976, v. AES - 12, №2]. Применяемый в нелинейных радарах фильтр нижних частот не обеспечивает, при увеличении мощности зондирующего сигнала, требуемого ослабления помех (требуемое ослабление помех порядка 100 дБ). Поэтому на вход приемной антенны, совмещенной с передающей антенной, вместе с полезным сигналом проникают гармоники зондирующего сигнала с передающей антенны и отраженные от подстилающей поверхности. Наличие гармоник зондирующего сигнала (в дальнейшем помехи) на входе приемной антенны затрудняет обнаружение полезного сигнала.
Недостатком приведенных выше радаров является небольшая дальность обнаружения.
Из известных нелинейных радаров наиболее близким по технической сущности и достигаемому эффекту является нелинейный радар для обнаружения исполнительных радиоэлектронных устройств управления взрывом [Россия. Заявка №2002125601 от 25 сентября 2002 г. по МПК G 01 S 9/02], содержащий последовательно соединенные опорный генератор, делитель частоты, линейный частотно-модулированный генератор, второй вход которого подключен к выходу опорного генератора, усилитель мощности, фильтр нижних частот и передающую антенну, а также последовательно соединенные приемную антенну, первый полосовой фильтр, смеситель, второй полосовой фильтр, приемник и индикаторное устройство, при этом второй вход смесителя через последовательно соединенные третий полосовой фильтр и усилитель-ограничитель подключен к выходу линейного частотно-модулированного генератора.
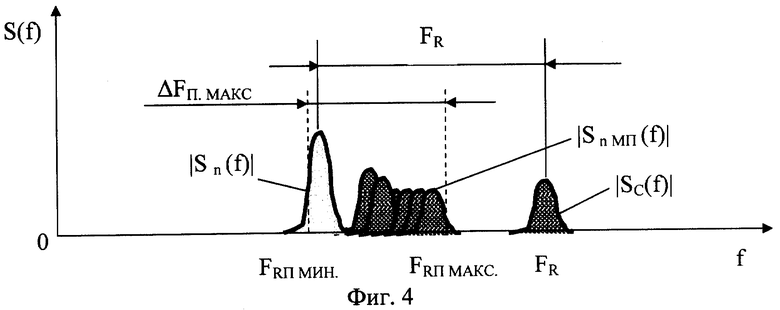
В данном радаре на вход приемной антенны вместе с полезным сигналом также проникают гармоники зондирующего сигнала с передающей антенны и отраженные от подстилающей поверхности. С выхода приемной антенны аддитивная смесь сигнала и помехи через первый полосовой фильтр поступает на вход смесителя. Преобразованные по частоте принимаемые сигналы поступают на вход второго полосового фильтра. Далее принимаемые сигналы через приемник поступают на вход индикаторного устройства. При наличии различий по дальности между искомым объектом и местными предметами на экране индикаторного устройства полезный сигнал SС(f) и помеха SП(f) наблюдаются раздельно (см. фиг.4). Из анализа фиг.4 следует, что полезный сигнал SС(f) в отличие от помехи SП(f) получает приращение частоты FR, величина которого зависит от времени задержки полезного сигнала и скорости перестройки частоты зондирующего сигнала.
Увеличение мощности излучения с целью повышения дальности обнаружения приведет к повышению уровня гармоник зондирующего сигнала на выходе фильтра нижних частот, а следовательно, и возрастет уровень гармоник зондирующего сигнала, которые через передающую антенну, напрямую, а также отражаясь от подстилающей поверхности, поступают на вход приемной антенны, что приведет к перегрузке приемника и снижению дальности обнаружения.
Таким образом, недостатком данного нелинейного радара является небольшая дальность обнаружения за счет влияния гармоник зондирующего сигнала, поступающих на вход приемного устройства с передающей антенны и отраженных от подстилающей поверхности.
Техническим результатом изобретения является повышение дальности обнаружения исполнительных радиоэлектронных устройств управления взрывом за счет снижения влияния гармоник зондирующего сигнала, поступающих на вход приемного устройства с передающей антенны и отраженных от подстилающей поверхности.
Указанный результат достигается за счет того, что в известный нелинейный радар для обнаружения исполнительных радиоэлектронных устройств управления взрывом, содержащий последовательно соединенные опорный генератор, делитель частоты, линейный частотно-модулированный генератор, второй вход которого подключен к выходу опорного генератора, последовательно соединенные усилитель мощности, фильтр нижних частот и передающую антенну, и последовательно соединенные приемную антенну, первый полосовой фильтр, смеситель и второй полосовой фильтр, а также последовательно соединенные приемник и индикаторное устройство, между линейным частотно-модулированным генератором и усилителем мощности введены последовательно соединенные третий полосовой фильтр, второй делитель частоты, четвертый полосовой фильтр, второй смеситель, второй вход которого подключен к выходу опорного генератора, пятый полосовой фильтр и блок формирования зондирующего линейного частотно-модулированного сигнала, между линейным частотно-модулированным генератором и вторым входом первого смесителя введены последовательно соединенные седьмой полосовой фильтр и блок формирования гетеродинного линейного частотно-модулированного сигнала, между вторым полосовым фильтром и приемником введены последовательно соединенные третий смеситель, шестой полосовой фильтр, режекторный фильтр, четвертый смеситель и блок фильтров точной селекции, а между вторыми входами третьего и четвертого смесителей и выходом опорного генератора введен блок формирования гетеродинных сигналов, причем ко второму входу индикаторного устройства подключен выход первого делителя частоты.
Предлагаемое техническое решение является новым, поскольку из общедоступных сведений не известен нелинейный радар, в котором повышение дальности обнаружения объектов с нелинейными рассеивателями достигается за счет снижения влияния гармоник зондирующего сигнала путем дополнительного преобразования принимаемых сигналов по частоте и подавления помех с помощью режекторного фильтра, и частотной избирательности приемного устройства за счет дополнительного преобразования и узкополосной фильтрации полезного сигнала по частоте.
Для снижения влияния гармоник зондирующего сигнала в известном нелинейном радаре введены третий полосовой фильтр, второй делитель частоты, четвертый полосовой фильтр, второй смеситель, пятый полосовой фильтр, блок формирования зондирующего линейного частотно-модулированного (ЛЧМ) сигнала, третий смеситель, шестой полосовой фильтр, режекторный фильтр, седьмой полосовой фильтр и блок формирования гетеродинного ЛЧМ сигнала.
Третий смеситель предназначен для понижения промежуточной частоты принимаемых сигналов до значений, на которых возможна реализация режекторного фильтра с амплитудно-частотной характеристикой, согласованной со спектром помехи.
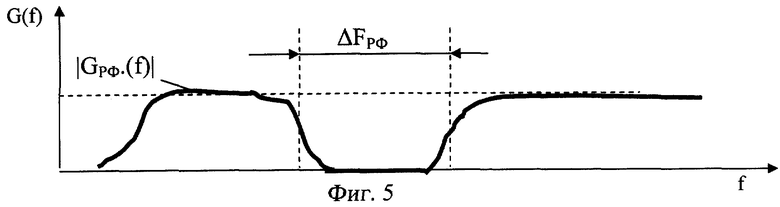
Полоса подавления режекторного фильтра ΔFРФ должна совпадать с преобразованными по частоте и свернутыми по спектру гармониками зондирующего ЛЧМ сигнала, проникающими с передающей антенны и отраженными от подстилающей поверхности (см. фиг.4 и 5 соответственно).
Требуемое значение ΔFРФ определяется по формуле


где ΔFП.МАКС.=2nμΔRП./С+1/(τИ.-2RП.МАКС./С)+1/τИ - максимальная ширина спектра помехи (см. фиг.4);
n=2, 3... - номер гармоник зондирующего сигнала;
μ=ΔF/τИ - скорость перестройки частоты зондирующего сигнала;
τИ - длительность зондирующего ЛЧМ сигнала;
ΔF- девиация частоты;
ΔRП.=RП.МАКС.-RП.МИН. - протяженность местных предметов;
RП.МАКС., RП.МИН. - максимальное и минимальное расстояние до местных предметов соответственно;
С - скорость света.
Так, например, для значений девиации частоты зондирующего сигнала ΔF=100 МГц, длительности ЛЧМ сигнала τИ=0,05 с, максимальном удалении и протяженности местных предметов RП.МАКС=15 м и ΔRП=15 м, при работе радара по второй гармонике ширина спектра отражений от подстилающей поверхности ΔFП не превышает 440 Гц. Тогда значение ширины полосы подавления режекторного фильтра ΔFРФ=1320 Гц.
Мощность помехи на выходе режекторного фильтра найдем из выражения

где РВХ.РФ - мощность помехи на входе режекторного фильтра;
КОСЛ. - коэффициент ослабления в полосе подавления режекторного фильтра.
Для нелинейного радара дальность действия RП в случае свободного пространства и в условиях помех [Зарубежная радиоэлектроника. №11, 1984 г.] находится из выражения

где  - мощность передатчика;
- мощность передатчика;  - коэффициент усиления передающей антенны; Gn - коэффициент усиления приемной антенны;
- коэффициент усиления передающей антенны; Gn - коэффициент усиления приемной антенны;  - длина принимаемой волны n-го порядка; σn - эффективная поверхность рассеяния (ЭПР) n-го порядка (имеет размерность площади только для линейного локатора, n=1);
- длина принимаемой волны n-го порядка; σn - эффективная поверхность рассеяния (ЭПР) n-го порядка (имеет размерность площади только для линейного локатора, n=1);  - отношение сигнал/шум;
- отношение сигнал/шум;  - мощность помехи на частоте n-й гармоники; ρ - показатель потерь, учитывающий несогласованную фильтрацию полезного сигнала при его обработке; n=1, 2, 3 - номер гармоник принимаемого сигнала.
- мощность помехи на частоте n-й гармоники; ρ - показатель потерь, учитывающий несогласованную фильтрацию полезного сигнала при его обработке; n=1, 2, 3 - номер гармоник принимаемого сигнала.
Тогда для предлагаемого нелинейного радара дальность действия (3) с учетом выражения (2) приобретает вид

где  - дальность действия предлагаемого нелинейного радара.
- дальность действия предлагаемого нелинейного радара.
Увеличение дальности действия нелинейного радара k за счет использования режекторного фильтра найдем из отношения выражений (4) и (3)

На практике режекторный фильтр в полосе режекции имеет коэффициент ослабления Косл более 30 дБ, который зависит от частоты настройки и ширины полосы подавления [Зааль Р. Справочник по расчету фильтров: Пер. с нем. - М.: Радио и связь, 1983, - 752 с., ил.]. Следовательно, мощность помехи на выходе режекторного фильтра (2) будет ослаблена более чем в 1000 раз. Тогда увеличение дальности k в соответствии с выражением (5) при приеме полезного сигнала на частоте второй гармоники (n=2) составит более чем в 3 раза.
Дополнительное снижение влияния гармоник зондирующего сигнала достигается за счет повышения частотной избирательности приемного устройства. Для этого в нелинейный радар введен четвертый смеситель и блок фильтров точной селекции.
Четвертый смеситель предназначен для преобразования полезного сигналов на промежуточную частоту до значений, на которых возможна реализация узкополосного фильтра, согласованного со спектром полезного сигнала.
Блок фильтров точной селекции состоит из гребенки фильтров точной селекции (6) со смещенными на ширину полосы пропускания резонансными частотами Fmо, где m=1, 2, 3,... номер фильтра точной селекции.
Число фильтров m, необходимое для анализа полосы обзора ΔFo, равно

где ΔFО - полоса обзора, определяемая из выражения

где RМАКС - максимальная дальность до искомого объекта с нелинейными рассеивателями, обнаружение которого обеспечивается с вероятностью не хуже заданной;
RМИН - минимальная дальность обнаружения объектов с нелинейными рассеивателями.
Минимальная дальность обнаружения Rмин объектов с нелинейными рассеивателями выбирается из условия снижения влияния на приемное устройство гармоник зондирующего сигнала, отраженных от подстилающей поверхности, и может быть найдена как

где ΔFФТС - полоса пропускания каждого фильтра точной селекции, выбираемая из условия

Так, например, для длительности импульса ЛЧМ сигнала τи=0,05 с, ΔF=100 МГц, Rмакс=750 м при ΔFРФ=1320 Гц и n=2, полоса пропускания фильтра точной селекции ΔFФТС, определяемая из выражения (9), не превышает 100 Гц, а величина R мин, определяемая из выражения (8), равна 49,5 м.
Величина ΔFо, определяемая из выражения (7), равна 12633,3 Гц. Тогда число фильтров m из (6), необходимое для анализа данной полосы обзора, равно 126.
Данное количество фильтров с полосой пропускания, равной 100 Гц, в настоящее время технически реализуемо.
Полоса пропускания фильтра ΔFФТС в предлагаемом нелинейном радаре влияет на разрешающую способность по дальности ΔR, которая может быть найдена из выражения

Для величин τи=0,05 с, ΔF=100 МГц при ΔFФТС=100 Гц и n=2 разрешающая способность по дальности не превышает ΔR=1,9 м, что является достаточным в реальных условиях применения нелинейного радара при указанных дальностях обнаружения.
Напряжение гетеродина для третьего и четвертого смесителей поступает с введенного блока формирования гетеродинных сигналов.
Таким образом, введение в состав нелинейного радара новых блоков снижает влияние гармоник зондирующего сигнала, поступающих с передающей антенны и отраженных от подстилающей поверхности на приемное устройство, что увеличивает более чем в три раза дальность обнаружения объектов с нелинейными рассеивателями и одновременно повышает частотную избирательность приемного устройства.
На фиг.1 представлена структурная схема предлагаемого нелинейного радара.
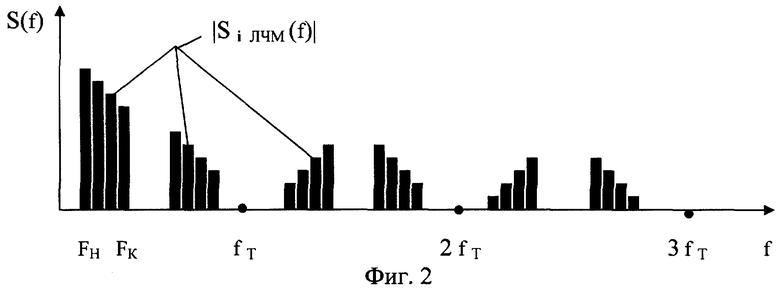
На фиг.2 - амплитудно-частотный спектр сигнала на выходе линейного частотно-модулированного генератора.
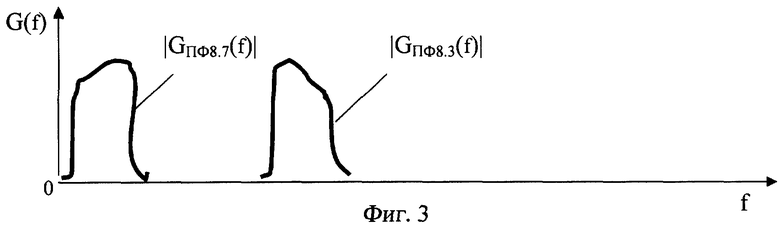
На фиг.3 представлена амплитудно-частотная характеристика седьмого и третьего полосовых фильтров соответственно.
На фиг.4 приведен амплитудно-частотный спектр полезного сигнала и помехи для прототипа.
На фиг.5 представлена амплитудно-частотная характеристика режекторного фильтра.
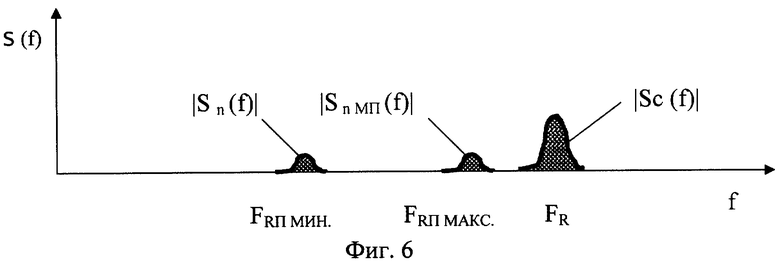
На фиг.6 приведен амплитудно-частотный спектр полезного сигнала предлагаемого нелинейного радара.
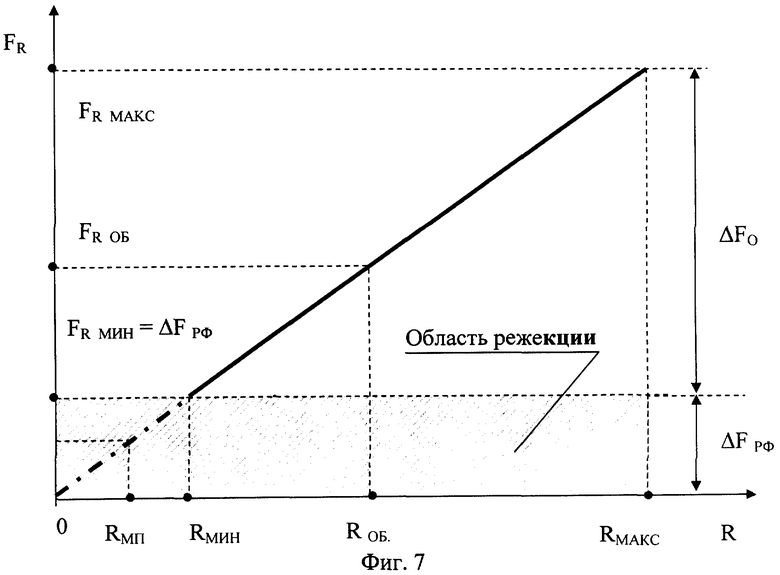
На фиг.7 приведена зависимость приращения частоты полезного сигнала от дальности при фиксированном значении скорости перестройки частоты зондирующего сигнала.
На фиг.1 структурной схемы нелинейного радара приняты следующие обозначения:
1 - опорный генератор,
2.1 и 2.2 - делители частоты,
3 - линейный частотно-модулированный (ЛЧМ) генератор,
4 - усилитель мощности,
5 - фильтр нижних частот,
6 - передающая антенна,
7 - приемная антенна,
8.1, 8.2, 8.3, 8.4, 8.5, 8.6 и 8.7 - полосовые фильтры,
9.1, 9.2, 9.3 и 9.4 - смесители,
10 - приемник,
11 - индикаторное устройство,
12 - блок формирования зондирующего ЛЧМ сигнала,
13 - режекторный фильтр,
14 - блок фильтров точной селекции,
15 - блок формирования гетеродинного ЛЧМ сигнала,
16 - блок формирования гетеродинных сигналов.
В предлагаемом нелинейном радаре, фиг.1, опорный генератор 1 через последовательно соединенные первый делитель частоты 2.1, линейный частотно-модулированный генератор 3, второй вход которого подключен к выходу опорного генератора 1, третий полосовой фильтр 8.3, второй делитель частоты 2.2, четвертый полосовой фильтр 8.4, второй смеситель 9.2, второй вход которого подключен к выходу опорного генератора 1, пятый полосовой фильтр 8.5, блок 12 формирования зондирующего ЛЧМ сигнала, усилитель мощности 4 и фильтр нижних частот 5 подключен к передающей антенне 6, а приемная антенна 7 через последовательно соединенные первый полосовой фильтр 8.1, первый смеситель 9.1, второй полосовой фильтр 8.2, третий смеситель 9.3, шестой полосовой фильтр 8.6, режекторный фильтр 13, четвертый смеситель 9.4, блок 14 фильтров точной селекции и приемник 10 подключена к входу индикаторного устройства 11, второй вход которого соединен с выходом первого делителя частоты 2.1, причем выход линейного частотно-модулированного генератора 3 через последовательно соединенные седьмой полосовой фильтр 8.7 и блок 15 формирования гетеродинного ЛЧМ сигнала подключен ко второму входу смесителя 9.1, а выход опорного генератора 1 через блок 16 формирования гетеродинных сигналов соединен со вторыми входами третьего и четвертого смесителей 9.3 и 9.4 соответственно.
Для реализации технического решения может быть использовано стандартное промышленное оборудование. Так, например, опорный генератор 1 представляет собой генератор с кварцевой стабилизацией, выполненный, например, на микросхеме серии К564ЛН2 [В.Н.Вениаминов, О.Н.Лебедев, А.И.Мирошниченко. Микросхемы и их применение: Справ. пособие. - 3-е изд., перераб. и доп. - М.: Радио и связь, 1989 г. - 240 с., стр.210, рис. 7.10, д ].
Делители частоты 2.1 и 2.2 могут быть выполнены, например, на микросхеме серии КМ155ИЕ8 [Перельман Б.Л., Шевелев В.И. Отечественные микросхемы и зарубежные аналоги. Справочник, "НТЦ Микротех", 2000 г. - 375 с., ил., стр.129, 81].
ЛЧМ генератор 3 представляет собой, например, схему цифрового синтезатора ЛЧМ сигнала [Кочемасов В.Н., Белов Л.А., Оконешников В.С. Формирование сигналов с линейной частотной модуляцией. - М.: Радио и связь, 1983. - 192 с., ил., стр.55, рис. 4.12].
Фильтр нижних частот 5, полосовые фильтры 8.1, 8.2, 8.3, 8.4, 8.5, 8.6 и 8.7 могут быть выполнены, например, по схеме полосового фильтра [Радиопередающие устройства. / М.В.Балакирев, Ю.С.Вохмяков, А.В.Журиков и др./ Под ред. О.А.Челнокова. - М.: Радио и связь, 1982. - 256 с., ил., стр.94, рис.4.12].
Смесители 9.1, 9.2, 9.3 и 9.4 представляют собой, например, диодный преобразователь частоты, выполненный по балансной схеме [М.С.Шумилин, В.Б.Козырев, В.А.Власов. Проектирование транзисторных каскадов передатчиков. Учебное пособие для техникумов. - М.: Радио и связь, 1987. - 320 с., ил., стр.178, рис.2.77].
Блоки 12 и 15 формирования зондирующего и гетеродинного ЛЧМ сигналов могут быть выполнены по схеме ФАПЧ с умножением входного опорного ЛЧМ сигнала в N раз [Гальперин М. В. Практическая схемотехника в промышленной автоматике. - М., 1987. - 320 с., ил., см. стр.183, рис.4.18, б].
Режекторный фильтр 13 может быть выполнен, например, по схеме режекторного LC-фильтра шестого порядка [Зааль Р. Справочник по расчету фильтров: Пер. с нем. - М.: Радио и связь, 1983, - 752 с., ил., см. стр.75, рис.8.21].
Блок 14 фильтров точной селекции состоит из гребенки узкополосных фильтров с высокой добротностью, выполненных, например, по схеме, приведенной в [М.: Радио, 1980, №9, стр.17].
Блок 16 формирования гетеродинных сигналов состоит из двух схем ФАПЧ с умножением в L (М) раз [Гальперин М.В. Практическая схемотехника в промышленной автоматике. - М., 1987. - 320 с., ил., см. стр.183, рис.4.18, б], где L, М - коэффициенты умножения опорного сигнала при формировании третьего и четвертого гетеродинных сигналов.
Заявляемый нелинейный радар (фиг.1) работает следующим образом.
Высокостабильные колебания с выхода опорного генератора 1 с тактовой частотой FT поступают на вход первого делителя 2.1 частоты и на второй вход ЛЧМ генератора 3. Делитель 2.1 частоты предназначен для формирования импульсов запуска ЛЧМ генератора 3 и для синхронизации индикаторного устройства 11. Период повторения импульсов равен длительности ЛЧМ сигнала. Амплитудно-частотный спектр ЛЧМ сигнала  на выходе генератора 3 показан на фиг.2. ЛЧМ сигнал с выхода генератора 3 поступает на входы третьего и седьмого полосовых фильтров 8.3 и 8.7 соответственно.
на выходе генератора 3 показан на фиг.2. ЛЧМ сигнал с выхода генератора 3 поступает на входы третьего и седьмого полосовых фильтров 8.3 и 8.7 соответственно.
Вид амплитудно-частотных характеристик полосовых фильтров 8.3 и 8.7 приведен на фиг.3.
Полосовой фильтр 8.3 настроен на третий подспектр ЛЧМ сигнала (см. фиг.2 и 3). С выхода полосового фильтра 8.3 третий подспектр ЛЧМ сигнала поступает на вход второго делителя 2.2 частоты для понижения частоты и ширины спектра входного сигнала в два раза. С выхода делителя 2.2 частоты ЛЧМ сигнал через полосовой фильтр 8.4 поступает на вход второго смесителя 9.2, на второй вход которого с выхода опорного генератора 1 поступает напряжение гетеродина. Преобразованный по частоте опорный ЛЧМ сигнал, через полосовой фильтр 8.5, поступает на вход блока 12 формирования зондирующего ЛЧМ сигнала. В блоке 12 формирования зондирующего ЛЧМ сигнала происходит умножение частоты опорного ЛЧМ сигнала в N раз.
Частота зондирующего ЛЧМ сигнала fзонд. (t) выбирается из условия

где N - коэффициент умножения;
Fi.лчм=iFT+FН - центральная частота i-го нечетного подспектра ЛЧМ сигнала, где i=1, 3, 5;
FН - начальная частота первого подспектра ЛЧМ сигнала;
t - текущее время.
С выхода блока 12 сигнал через последовательно соединенные усилитель мощности 4, фильтр 5 нижних частот поступает на вход передающей антенны 6.
Усилитель мощности 4 может быть выполнен по схеме линейного усилителя и согласован с девиацией частоты зондирующего сигнала (11).
Полосовой фильтр 8.7 настроен на первый подспектр ЛЧМ сигнала (см. фиг.2 и 3). Выделяемый ЛЧМ сигнал с выхода полосового фильтра 8.7 поступает на вход блока 15 формирования гетеродинного ЛЧМ сигнала.
Частота гетеродинного ЛЧМ сигнала fГ1 (t) выбирается из условия

где FО1.ЛЧМ=FH - частота основного подспектра ЛЧМ сигнала.
С выхода блока 15 ЛЧМ сигнал на частоте (12) поступает на второй вход смесителя 9.1.
Поиск объектов с нелинейными рассеивателями начинается с момента излучения передающей антенной 6 зондирующего ЛЧМ сигнала (11).
В сигнале, поступающем на вход приемной антенны 7, наряду с сигналом, отраженным от объектов с нелинейными рассеивателями, появляются n частотных составляющих с умноженным в n значением девиации частоты, отсутствующих в спектре облучающего поля [Кузнецов А.С., Кутан Г.И. Методы исследования эффекта нелинейного рассеяния электромагнитных волн. Зарубежная радиоэлектроника, 1985, 4, стр.41-53].

где tЗ=2R/C - время задержки;
R - расстояние до объекта с нелинейными рассеивателями.
Наряду с полезным сигналом на вход приемной антенны 7 возможно поступление n-ой гармоники зондирующего сигнала (помехи) как с предающей антенны, так и отраженной от подстилающей поверхности.
Предположим, что полоса пропускания полосового фильтра 8.1 согласована с шириной спектра второй гармоники принятого ЛЧМ сигнала. Тогда полезный сигнал и помеха на частоте второй гармоники с выхода полосового фильтра 8.1 поступают на смеситель 9.1, где они смешиваются с сигналом гетеродина (12). На выходе смесителя 9.1 формируются сигналы первой промежуточной частоты (fпч1)

Полезный сигнал Sc(f) будет отличаться от помехи SП(f) по частоте, на величину

где FR=μtЗ - приращение частоты.
Так, например, для значений девиации частоты ΔF=100 МГц, периода следования ЛЧМ сигнала τИ=0,05 с и задержки полезного ЛЧМ сигнала tЗ=1·10-6 с, приращение частоты FR составит 4,0 кГц.
Амплитудно-частотные спектры полезного сигнала  и помехи
и помехи  приведены на фиг.4. Спектр помехи
приведены на фиг.4. Спектр помехи  состоит из гармоники зондирующего сигнала
состоит из гармоники зондирующего сигнала  и гармоник отраженных от местных предметов
и гармоник отраженных от местных предметов 
Сигналы (14), отфильтрованные полосовым фильтром 8.2, поступают на вход третьего смесителя 9.3, где они смешиваются с сигналом гетеродинной частоты, поступающим с первого выхода блока 16 формирования гетеродинных сигналов. Полезный сигнал и помеха с выхода смесителя 9.3 поступают на вход шестого полосового фильтра 8.6.
Ширина полосы пропускания полосового фильтра 8.6 ΔFПФ8.6 влияет на полосу обзора нелинейного радара ΔFo, и выбирается из условия

Полезный сигнал и помеха на второй промежуточной частоте fПЧ.20 с выхода полосового фильтра 8.6 поступают на вход режекторного фильтра 13.
Амплитудно-частотная характеристика режекторного фильтра 13 приведена на фиг.5.
Из сравнения значений дальномерного приращения частоты FR полезного сигнала Sc(f) из (15) и ширины полосы подавления режекторного фильтра 13 ΔFРФ из (1) следует, что помеха попадает в полосу подавления режекторного фильтра 13, а полезный сигнал Sc(f) проходит без ослабления. Вид амплитудно-частотных спектров полезного сигнала  и остатков помехи
и остатков помехи  на выходе режекторного фильтра 13 приведен на фиг.6.
на выходе режекторного фильтра 13 приведен на фиг.6.
Зависимость приращения частоты полезного сигнала FR от дальности при фиксированном значении скорости перестройки частоты зондирующего сигнала μ приведена на фиг.7 (сплошная линия - значение частоты FR находится в полосе обзора ΔFО, штрихпунктирная линия - значение частоты FR находится в области режекции ΔFРФ (заштрихованная область)).
Полезный сигнал Sc(f) поступает на вход четвертого смесителя 9.4, где смешивается с напряжением гетеродина, поступающим со второго выхода блока 16 формирования гетеродинных сигналов. С выхода смесителя 9.4 полезный сигнал на третьей промежуточной частоте, через блок 14 фильтров точной селекции, поступает на вход приемника 10.
Блок 14 фильтров точной селекции выполнен в виде гребенки доплеровских фильтров (9).
В приемнике 10 происходит усиление и преобразование полезного сигнала к виду, удобному для наблюдения на индикаторном устройстве 11.
Таким образом, введение в состав нелинейного радара новых блоков снижает влияние гармоник зондирующего сигнала, поступающих в приемное устройство с передающей антенны и отраженных от подстилающей поверхности, что увеличивает более чем в три раза дальность обнаружения объектов с нелинейными рассеивателями и одновременно повышает частотную избирательность приемного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ОБНАРУЖЕНИЯ ПОДСЛУШИВАЮЩИХ УСТРОЙСТВ | 2007 |
|
RU2327185C1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ПРОДУКТОПРОВОДОВ | 2007 |
|
RU2343499C1 |
| НЕЛИНЕЙНЫЙ РАДАР ДЛЯ ОБНАРУЖЕНИЯ ИСПОЛНИТЕЛЬНЫХ РАДИОЭЛЕКТРОННЫХ УСТРОЙСТВ УПРАВЛЕНИЯ ВЗРЫВОМ | 2002 |
|
RU2234715C2 |
| СТАНЦИЯ ПОМЕХ ЛИНИЯМ РАДИОСВЯЗИ | 2002 |
|
RU2233551C2 |
| РАДИОЛОКАТОР С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩЕГО СИГНАЛА | 1993 |
|
RU2060514C1 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| СПОСОБ НЕЛИНЕЙНОЙ РАДИОЛОКАЦИИ С ЛИНЕЙНЫМ ЧАСТОТНЫМ МОДУЛИРОВАННЫМ ЗОНДИРУЮЩИМ СИГНАЛОМ | 2020 |
|
RU2750571C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ, ВКЛЮЧАЮЩИХ ЭЛЕМЕНТЫ С НЕЛИНЕЙНЫМИ ВОЛЬТ-АМПЕРНЫМИ ХАРАКТЕРИСТИКАМИ | 2004 |
|
RU2291462C2 |
| РАДИОВЫСОТОМЕР | 2001 |
|
RU2212684C1 |
| Способ повышения точности определения дальности до нелинейного рассеивателя при помощи нелинейного радиолокатора, использующего линейно-частотно-модулированные зондирующие сигналы | 2024 |
|
RU2830970C1 |
Изобретение относится к области радиолокации и может быть использовано при разработке мобильных нелинейных радаров для дистанционного обнаружения исполнительных радиоэлектронных устройств управления взрывом. Техническим результатом изобретения является повышение дальности обнаружения исполнительных радиоэлектронных устройств управления взрывом за счет снижения влияния гармоник зондирующего сигнала, поступающих на вход приемного устройства с передающей антенны и отраженных от подстилающей поверхности. Нелинейный радар для обнаружения исполнительных радиоэлектронных устройств управления взрывом содержит опорный генератор, первый делитель частоты, линейный частотно-модулированный генератор, усилитель мощности, фильтр нижних частот, передающую и приемную антенны, первый полосовой фильтр, смеситель, второй полосовой фильтр, приемник и индикаторное устройство, согласно изобретению введены третий полосовой фильтр, второй делитель частоты, четвертый полосовой фильтр, второй смеситель, пятый полосовой фильтр, формирователь зондирующего линейного частотно-модулированного сигнала, третий смеситель, шестой полосовой фильтр, режекторный фильтр, четвертый смеситель, блок фильтров точной селекции, седьмой полосовой фильтр, формирователь гетеродинного линейного частотно-модулированного сигнала и блок гетеродинных сигналов. Введение в состав нелинейного радара новых блоков снижает влияние гармоник зондирующего сигнала, поступающих в приемное устройство с передающей антенны и отраженных от подстилающей поверхности, что увеличивает более чем в три раза дальность обнаружения объектов с нелинейными рассеивателями и одновременно повышает частотную избирательность приемного устройства. 7 ил.

Нелинейный радар для обнаружения исполнительных радиоэлектронных устройств управления взрывом, содержащий последовательно соединенные опорный генератор, делитель частоты, линейный частотно-модулированный генератор, второй вход которого подключен к выходу опорного генератора, последовательно соединенные усилитель мощности, фильтр нижних частот и передающую антенну, и последовательно соединенные приемную антенну, первый полосовой фильтр, смеситель и второй полосовой фильтр, а также последовательно соединенные приемник и индикаторное устройство, отличающийся тем, что между линейным частотно-модулированным генератором и усилителем мощности введены последовательно соединенные третий полосовой фильтр, второй делитель частоты, четвертый полосовой фильтр, второй смеситель, второй вход которого подключен к выходу опорного генератора, пятый полосовой фильтр и блок формирования зондирующего линейного частотно-модулированного сигнала, между линейным частотно-модулированным генератором и вторым входом первого смесителя введены последовательно соединенные седьмой полосовой фильтр и блок формирования гетеродинного линейного частотно-модулированного сигнала, между вторым полосовым фильтром и приемником введены последовательно соединенные третий смеситель, шестой полосовой фильтр, режекторный фильтр, четвертый смеситель и блок фильтров точной селекции, а между вторыми входами третьего и четвертого смесителей и выходом опорного генератора введен блок формирования гетеродинных сигналов, причем ко второму входу индикаторного устройства подключен выход первого делителя частоты.
| СПОСОБ ОБНАРУЖЕНИЯ НЕЛИНЕЙНОГО ОБЪЕКТА С РАСПОЗНАВАНИЕМ ТИПА НЕЛИНЕЙНОСТИ | 2001 |
|
RU2205419C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ОБЪЕКТОВ, ВКЛЮЧАЮЩИХ ЭЛЕМЕНТЫ С НЕЛИНЕЙНЫМИ ВОЛЬТАМПЕРНЫМИ ХАРАКТЕРИСТИКАМИ | 2000 |
|
RU2166769C1 |
| US 2002158697, 31.10.2002 | |||
| US 4439766 А, 27.03.1984 | |||
| US 4503433 А, 05.03.1985 | |||
| ЭЛЕКТРОМАГНИТ/НЫЙ ВИБРАЦИОННЫЙ ПРИВОД | 0 |
|
SU258917A1 |

