Изобретение относится к области подводной морской техники, в частности к модульным необитаемым подводным, преимущественно телеуправляемым, аппаратам (МНПА), которые могут быть применены в качестве игрового обучающего конструктора с широкой вариабельностью параметров и типоразмеров, а также в различного рода подводных исследованиях и проведении работ по поиску и обследованию затонувших объектов, инспекции подводных сооружений и коммуникаций, в том числе трубопроводов и электрических кабелей, геологоразведочных работах, включающих фотосъемку, гидроакустическую и профилографическую съемку рельефа морского дна, экологический мониторинг, оценку запасов биоресурсов тестирование и апробацию аппаратных и программных решений при совершенствовании конструкций МНПА, тестирование и калибровку датчиков, основанных на различных физических принципах.
Известен комплекс телеуправляемого необитаемого подводного аппарата [1. Патент РФ на полезную модель №130292, Опубликовано: 20.07.2013 Бюл. №20. Комплекс телеуправляемого необитаемого подводного аппарата], содержащий установленную на обеспечивающем судне бортовую часть, соединенную кабель-тросом с забортной подводной частью, и включающий надводный модуль, содержащий блок отображения информации, блок питания, блок обработки гидроакустической информации, блок отображения видео- и гидроакустической информации, пульт управления, антенну системы подводного позиционирования, кабель-трос на кабельной вьюшке с токосъемником, подводная часть комплекса выполнена в виде модуля телеуправляемого подводного аппарата, который содержит несущую раму с блоком плавучести, подводная часть оснащена телекамерами, источниками освещения и маяком-ответчиком системы подводного позиционирования, гидролокатором, навигационным блоком, распределительным блоком, манипулятором, пятью движителями, причем горизонтальные движители расположены по векторной схеме, наклонной платформой, содержащей, по меньшей мере, одну видеокамеру и/или светильник, подводная часть содержит, по меньшей мере, две видеокамеры.
Недостатком такого комплекса является необходимость привязки к обеспечивающему судну, что существенно ограничивает автономность подводной части, применимость в качестве игровой образовательной платформы. Кроме того, отсутствуют возможности комбинирования различных блоков и полезных нагрузок.
Известен мобильный подводный аппарат [2. Патент на полезную модель РФ №60476, Опубликовано: 27.01.2007 Бюл. №3. Мобильный подводный аппарат], содержащий корпус обтекаемой формы, движитель непосредственного воздействия на воду, соединенный с корпусом, корпус этого подводного аппарата выполнен в виде симметричного тела вращения, а на внешней части корпуса закреплены движители, соединенные с корпусом посредством пилонов, причем на аппарате установлено не менее двух движителей.
Недостатком такого мобильного подводного аппарата является сложность размещения или присоединения дополнительных модулей полезной нагрузки.
Известен подводный аппарат повышенной маневренности [3. Патент РФ №2290338, Опубликовано: 27.12.2006 Бюл. №36. Подводный аппарат повышенной маневренности], содержащий корпус и кормовую движительную установку, включающую два маршевых реверсивных движителя, размещенных в горизонтальной плоскости под углом к продольной оси аппарата по разные стороны от оси, а кормовая движительная установка дополнительно снабжена размещенным в горизонтальной плоскости перпендикулярно продольной оси подводного аппарата баллером с реверсивным приводом, обеспечивающим возможность возвратно-поворотных движений баллера относительно его продольной оси, а маршевые реверсивные движители неподвижно размещены на баллере.
Недостатком такого подводного аппарата является отсутствие специализированной полезной нагрузки, системы связи и передачи данных.
Известен модульный автономный необитаемый подводный аппарат [4. Патент РФ №2667674, Опубликовано: 24.09.2018 Бюл. №27. Модульный автономный необитаемый подводный аппарат].
Он содержит металлический корпус с размещенными в нем герметичными модулями, корпуса которых выполнены из радиопрозрачного материала, при этом модули снабжены источниками электроэнергии и электронной аппаратурой с радиомодулями, объединяющими электронную аппаратуру всех модулей в единую беспроводную информационно-управляющую сеть, причем питание каждого модуля осуществляется от своего источника электроэнергии.
Недостаток известного устройства заключается в том, что его конструкция не предполагает использования нескольких типоразмеров, быструю замену полезной нагрузки, изменение конфигурации МНПА за счет присоединения (удаления) дополнительных модулей.
Наиболее близким к заявляемому устройством (ближайшим аналогом, т.е. прототипом) по назначению и совокупности существенных конструктивных признаков является модульный необитаемый подводный аппарат «Океаника» [5. Полезная модель к патенту РФ №193287 U1, B63G 8/00; В63Н 25/00; В63С 11/48 Опубл. 22.10.2019. Бюл. №30. Модульный автономный необитаемый подводный аппарат «Океаника»], содержащий пластиковый корпус с размещенными в нем герметичными модулями, корпуса которых выполнены из радиопрозрачного материала, при этом упомянутые модули снабжены собственными источниками электроэнергии и электронной аппаратурой с радиомодулями, объединяющими электронную аппаратуру всех модулей в единую беспроводную информационно-управляющую сеть, с возможностью взаимосвязи аппарата с пультом управления, расположенным на транспортном средстве сопровождения или непосредственно у оператора, надводный модуль, содержащий источник электроэнергии, блок проводной связи, радиомодуль, блок спутниковой системы навигации, движители, электромеханическую и электронную аппаратуру для перемещения модуля по водной поверхности, причем надводный модуль связан с подводной частью аппарата проводной линией связи, а с упомянутым пультом управления связан радиомодуль надводной части аппарата.
Недостатком устройства, выбранного в качестве прототипа, является то, что наличие нескольких автономных корпусов усложняет и удорожает конструкцию и снижает ее надежность.
Задача заявляемого изобретения состоит в разработке МНПА, дающего пользователю возможность выбора множества вариантов конструкций аппарата при упрощении и удешевлении устройства, а также повышении его надежности.
Техническим результатом заявляемого изобретения являются упрощение конструкции, ее удешевление, повышение надежности при обеспечении больших возможностей по построению финальной конструкции МНПА в зависимости от специфики решаемых задач, при самостоятельном проектировании и обучении, а также осуществление быстрой смены полезной нагрузки.
Указанный технический результат достигается тем, что в модульном, преимущественно телеуправляемом, необитаемом подводном аппарате содержащем подводный модуль, в корпусе которого размещен первый источник электроэнергии, электромеханическая и электронная аппаратура, движители для перемещения модуля под водой, управляемые и неуправляемые стабилизаторы, полезная нагрузка, в том числе видеокамеры и осветители, и планки Пикатинни в качестве средств крепления дополнительной нагрузки и модулей, и конструктивно и функционально объединенный с подводным модулем надводный модуль, с размещенными в нем, при необходимости, вторым источником электроэнергии, блоком проводной или беспроводной связи, радиомодулями и блоками спутниковой системы навигации, связанный с подводным модулем проводной линией связи, при этом предусмотрена возможность радиосвязи надводного модуля с пультом управления с размещенными в нем, третьим источником электроэнергии, органами управления, устройством отображения информации и радиомодулем, согласно заявляемому изобретению, упомянутые планки Пикатинни установлены на корпусе подводного модуля и на них смонтировано перечисленное бортовое оборудование подводного модуля, включая упомянутую полезную нагрузку, управляемую систему переменного балласта, а электропитание оборудования осуществляется через соответствующие группы электроразъемов, надводный модуль дополнительно снабжен оптическим датчиком сигнализации.
Поставленная задача решается также за счет группы дополнительных конструктивных признаков устройства (на базе сформулированной выше совокупности основных признаков):
- движители могут быть выполнены с винтами разных форм и моторов различной мощности для обеспечения движения по суше и под водой (это позволяет обеспечить равномерность хода при навешивании на планки Пикатинни различных видов полезной нагрузки);
- корпус подводного модуля может быть выполнен в виде цилиндра, эллипсоида, оживальной и др. форм (это позволяет интегрировать внутрь корпуса различные по размерам и функциональности блоки электроники);
- движители могут быть выполнены гусеничными или колесными для обеспечения движения по суше и под водой (это позволяет обеспечить применение на различных по условиям проходимости участках поверхности суши);
- на планках Пикатинни могут быть смонтированы понтоны для обеспечения положительной плавучести с возможностью перемещения по водной поверхности (это позволяет, при необходимости, трансформировать подводный или наземный вариант аппарата в надводный);
- на планках Пикатинни могут быть смонтированы датчики, различных типов, видеокамеры (это позволяет быстро менять функционал аппарата, манипулировать различным расположением датчиков в зависимости от требований и необходимости);
- к корпусу подводного модуля в вертикальной, горизонтальной и продольной плоскостях могут быть прикреплены дополнительные планки Пикатинни, с возможностью размещения на них движителей, датчиков различных типов, видеокамер и осветителей (это позволяет обеспечить расширение функциональности за счет крепления дополнительных датчиков, грузов и других полезных нагрузок в пределах ограничений по грузоподъемности и мощности движителей);
- посредством планок Пикатинни могут быть соединены несколько основных подводных модулей (их корпусов) между собой, образуя различные его конфигурации (это позволяет обеспечить расширение функциональных возможностей за счет использования нескольких подводных модулей оснащенных разными датчиками);
- посредством планок Пикатинни может быть смонтирован дополнительный герметичный модуль, представляющий собой аккумуляторный отсек, с возможностью использования как внутреннего источника энергоснабжения (аккумулятора), так и внешнего источника энергоснабжения (аккумулятора) (это позволяет увеличить энергетические возможности аппарата по необходимости);
- устройство отображения информации может быть выполнено в виде отдельного устройства, с возможностью осуществления связи по беспроводному каналу с пультом управления и представляет собой, мобильный телефон, айфон или компьютер (это позволяет применять различные устройства в зависимости от того, что имеется в распоряжении оператора);
- в качестве полезной нагрузки могут использоваться манипуляторы различных типов (это позволяет расширить функциональность за счет обеспечения захвата различных предметов в пределах ограничений по грузоподъемности);
- в качестве полезной нагрузки могут использоваться специализированные датчики экологического мониторинга (это позволяет расширить функциональность устройства телеуправляемого необитаемого подводного аппарата);
- на надводном модуле в качестве источника энергоснабжения может использоваться солнечная батарея (это обеспечит большее время работы аппарата без зарядки аккумуляторных батарей);
- на надводном модуле может быть установлен световой или звуковой датчик для визуального или акустического определения местоположения аппарата в ночное время суток (это позволит визуально или акустических определить местоположение аппарата в ночное время суток оператором и/или служить как дополнительное средство контроля перемещения аппарата по акватории);
- на подводном, надводном модуле и пульте управления могут находиться системы контроля состояния источников энергоснабжения (контроллеры заряда-разряда) (это позволит оператору в реальном масштабе времени оценивать остаточный ресурс работы элементов системы);
- подводный модуль может быть оснащен доплеровским лагом для измерения скорости (это позволит получить дополнительное независимое измерение скорости перемещения подводного модуля, что позволит повысить эффективность работы системы управления МНПА);
- подводный модуль может иметь блок комплексирования барометрических и ультразвуковых датчиков измерения глубины (это позволит с большей точностью и достоверностью определить реальную глубину МНПА);
- связь между надводным и подводным модулем может осуществляться по гидроакустическому каналу связи, приемо-передающие модули которых крепятся на планки Пикатинни (это позволит отказаться от кабель-троса, соединяющего подводный и надводный модули, что даст МНПА большую маневренность, особенно в водоемах, имеющих значительное количество затопленных подводных предметов, густые водоросли, а также и в ряде случаев в водоемах с интенсивным течением);
- на планки Пикатинни может крепиться видеокамера, с возможностью осуществления режима виртуального перископа (это позволит организовать наблюдение за объектами интереса из-под воды с применением подводного модуля);
- видеокамера может быть установлена на подводном модуле на манипуляторе, обладающем двумя или тремя степенями свободы (это позволит вести наблюдение за объектами интереса без изменения параметров движения МНПА);
- надводный модуль может выполнять роль буксировщика подводного модуля (это позволит осуществить эвакуацию подводного модуля при его отказе, или в целях экономии ресурса аккумуляторных батарей подводного модуля);
- зарядка источника энергоснабжения подводного модуля может осуществляться бесконтактным (индукционным) способом (это позволит не разбирать корпус аппарата при замене источника энергоснабжения или исключить иные операции по связанные прямо или косвенно с нарушением герметичности корпуса МНПА, что повысит надежность конструкции в целом);
- на надводном модуле может быть размещен парус для его перемещения (это позволит осуществить перемещение надводного модуля с минимизацией затрат энергии).
С целью идентификации заявляемого устройства в линейке устройств такого назначения, а также акцентирования внимания на его функциональные особенности, авторы считают целесообразным присвоить заявляемому устройству значимое название - «Океаника-КИТ», где аббревиатура «КИТ» расшифровывается как «комплект исследовательских технологий. При этом важно отметить, что заявляемый аппарат выполнен по принципу «морфологического куба». Это позволяет при точной формулировке задачи, подлежащей решению с применением МНПА, составить список всех морфологических признаков, т.е. наиболее важных его характеристик, от которых зависит решение задачи и достижение основной цели. После чего осуществляется раскрытие возможных вариантов по каждому морфологическому признаку (характеристике) путем составления матрицы и определение практической ценности всех полученных вариантов решений, и далее - выбор наиболее рациональных решений.
Совокупность отличительных существенных признаков заявляемого устройства не является простой суммой известных технических результатов применения порознь известных компонентов системы. Имеет место «сверхэффект» (в патентоведческом значении этого термина), который не был очевидным для специалиста из достигнутого уровня техники (разумеется, до рассмотрения заявляемого технического решения). С целым спектром дополнительных технико-эксплуатационных возможностей. Это убедительно демонстрирует изобретательский уровень разработки как второй из триады квалификационных признаков изобретения.
Третий квалификационный признак - промышленная применимость - также неоспорим и вытекает, прежде всего, из того же богатого опыта проектирования, производства, эксплуатации и ремонта морских, речных и амфибийных транспортных средств.
Техническая сущность и принцип действия предложенного устройства поясняются фигурой 1, на которой представлена блок-схема заявляемого устройства.
Модульный автономный необитаемый подводный аппарат «Океаника-КИТ» содержит (фигуры 1-7):
1 - корпус подводного модуля;
2 - аппаратура управления и вычислительное устройство;
3.1-3.n - движители(ь), электромеханическая и электронная аппаратура;
4.1-4.n - измерительные модули (модули полезной нагрузки);
5 - надводный модуль;
6 - пульт управления;
7.1-7.3 - источники электроэнергии (первый, второй и третий соответственно);
8.1, 8.2 - радиомодули;
9.1-9.3 - блоки проводной связи;
10 - провод связи;
11.1-11.2 - блоки спутниковой системы навигации;
12 - органы управления;
13 - устройство отображения информации;
14.1-14.8 - планки Пикатинни (или иные, аналогичные им);
15 - управляемая система переменного балласта;
16.1-16.n - понтоны;
17.1-17.n - рули-стабилизаторы;
18 - оптический датчик сигнализации.
Подводный модуль 1 содержит: аппаратуру управления и вычислительное устройство 2, n - движителей и электромеханическую (с электронной) аппаратуру 3.1-3.4, измерительные модули (модули полезной нагрузки) 4.1-4.4, в качестве которых может использоваться видеокамера с аппаратурой освещения, различные типы датчиков-измерителей, в качестве которых могут быть применены исследовательские системы (гидроакустическая антенна, глубиномер, аппаратура фото- и видеорегистрации, радиационного и химического контроля, датчики растворенного кислорода, датчики прозрачности воды, датчики температуры, и пр.), блок проводной связи - 9.1, планки Пикатинни (или аналогичные им, например Вивера) 14.1-14.8, управляемую систему переменного балласта 15, понтоны для регулирования плавучести или движения в надводном положении 16.1-16.n.
Надводный модуль 5 содержит: второй источник электроэнергии 7.2, радиомодуль 8.1, блок проводной связи 9.2, электромеханическую аппаратуру 11.4, блок спутниковой системы навигации 11.1, при необходимости, надводный модуль может обеспечиваться движителем и электромеханической аппаратурой 3 и оптическим датчиком сигнализации 18.
Надводный модуль является коммуникационным буем, который, в зависимости от среды, в которой работает аппарат, либо соединен кабелем определенной длины, в зависимости от глубины погружения, либо связан с корпусом с помощью короткого кабеля. Надводный модуль может являться источником дополнительного энергоснабжения при размещении в нем или на прикрепленном к нему понтону размещение источника энергоснабжения большой емкости. Возможно исполнение надводного модуля в варианте, содержащем движители для самостоятельного перемещения по водной поверхности, с тем, чтобы разгрузить подводный аппарат от необходимости буксировать надводный модуль по поверхности воды, а также для обеспечения большей автономности.
Таким образом, подводный 1 и надводный 5 модули конструктивно и функционально объединены, по меньшей мере, постоянной гибкой связью (кабельной, проводной, беспроводной).
Пульт управления 6 содержит: третий источник электроэнергии 7.3, радиомодуль 8.2, блок спутниковой системы навигации 11.2, органы управления 12; устройство отображения информации 13.
Связь между надводным модулем 1 и подводным модулем 5 осуществляется посредством блоков 9.1 и 9.2, соединенных проводом связи 10.
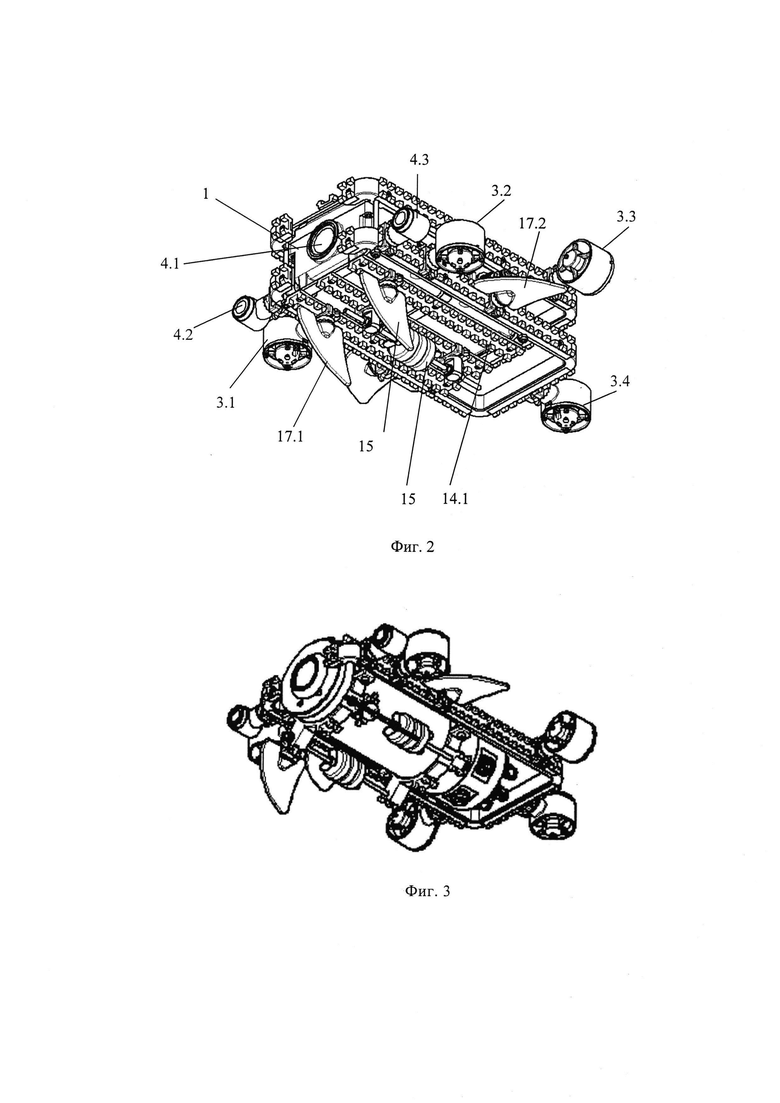
Заявляемый модульный, преимущественно телеуправляемый, необитаемый подводный аппарат «Океаника-КИТ», выполненный по принципу морфологического куба, позволяет по различному конфигурировать модули 3.n и 4.n, получать при этом различные форм-факторы, путем наращивания модулей, достигая широкой вариабельности по конструкциям (см. фиг. 2-7).
Фиг. 2. Подводный аппарат с корпусом в виде параллелепипеда. Внешний вид снизу, где номера (позиции) составных частей соответствуют номерам (позициям) элементов блок-схемы фиг. 1.
Фиг. 3. Подводный аппарат с цилиндрическим корпусом.
Фиг. 4. Подводный аппарат в режиме надводного плавания.
Фиг. 5. Подводный аппарат с дополнительными планками Пикатинни.
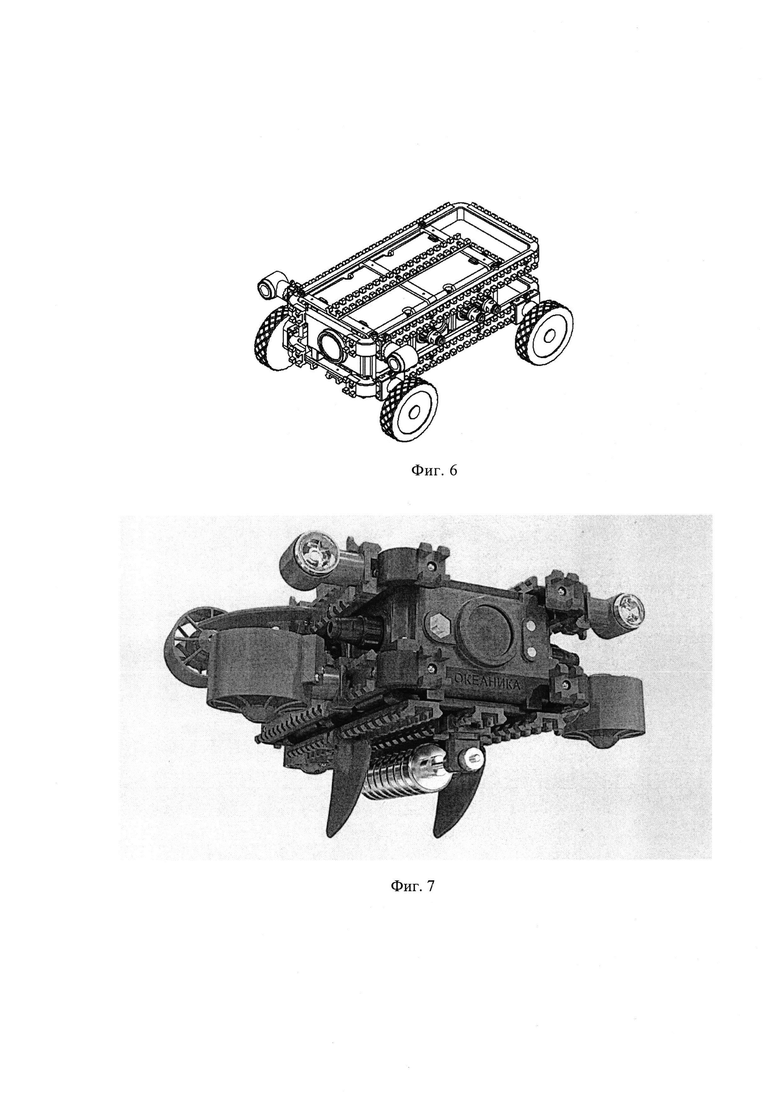
Фиг. 6. Подводный аппарат с колесным движителем для перемещения по наземной поверхности и дну.
Фиг. 7. Внешний вид изготовленного телеуправляемого МНПА «Океаника-КИТ», выполненного по принципу морфологического куба.
Управление аппаратом осуществляется с пульта управления 6 посредством органов управления 12, а команды управления транслируются по радиоканалу (радиомодули 8.1 и 8.2). Команды управления поступают на надводный модуль 5 и посредством электромеханической аппаратуры 3.5 осуществляется выход надводного модуля 5 в заданную точку, либо осуществление по заданному маршруту. Взаимное положение надводного модуля 5 и пульта управления 6 осуществляется путем съема координат по данным блоков спутниковой системы навигации 11.1 и 11.2.
Команды управления подводным модулем осуществляются органами управления 12 с пульта управления 6, транслируются по радиоканалу (радиомодули 8.1 и 8.2) и далее, через блоки проводной связи 9.1 и 9.2, соединенные кабелем связи 10, команды управления поступают в аппаратуру управления и вычислительное устройство 2, благодаря чему осуществляется управление электромеханической аппаратурой и движительными модулями 3.1-3.n, измерительными модулями (модули полезной нагрузки) 4.1-4.n и модулями рулей стабилизаторов 17.1-17.n и управляемой системой переменного балласта 15 для обеспечения плавучести аппарата в соленой и пресной воде.
Показания измерительных модулей (модулей полезной нагрузки) 4.1-4.n. и местоположение надводного модуля 5 отображаются на устройстве отображения информации 13.
Применение такого подхода позволяет находить наибольшее число, а в переделе - исследовать все возможные варианты построения проектируемого устройства путем комбинирования различных элементов, входящих в систему, их расположения на корпусе подводного модуля, выбора их взаимодействия между собой, оптимизации режимов работы (применения движителей различной мощности и типа, различных типов винтов, колес, мест их крепления, управляемых и неуправляемых рулевых машин, гидроакустических антенн, глубиномеров, аппаратуры фото- и видеорегистрации, ультразвукового сканирования (ультразвукового синтеза апертуры), датчиков растворенного кислорода, прозрачности воды, температуры, балластных грузов, понтонов и пр.).
Применение морфологического анализа позволяет рассмотреть проблему проектирования устройств с точки зрения разложения целого на составные части и выбор наиболее эффективных решений.
Описание остальных устройств касается частных принципов их построения и функционирования, так:
движители 3.1-3.n выполнены с винтами разных форм и моторов различной мощности для обеспечения движения по суше и под водой (см. например фиг. 5, фиг. 6 и фиг. 7);
корпус подводного модуля 1 выполнен в виде цилиндра, эллипсоида, оживальной и др. форм (см. например фиг. 3);
движители 3.1-3.n выполнены гусеничными или колесными для обеспечения движения по суше и под водой (см. например фиг. 6);
на планки Пикатинни 14.1-14.n крепятся понтоны 16.1-16.n в обеспечение положительной плавучести с возможностью перемещения по водной поверхности (см. например фиг. 4);
на планках Пикатинни 14.1-14.n смонтированы датчики, различных типов, видеокамеры 4.1-4.n;
к корпусу подводного модуля 1 в вертикальной, горизонтальной и продольной плоскостях прикреплены планки Пикатинни 14.1-14.n большей длины, с возможностью размещения на них движителей 3.1-3.n, датчиков различных типов, видеокамер и осветителей 4.1-4.n (см. например фиг. 5);
посредством планок Пикатинни 14.1-14.n соединено несколько основных подводных модулей 1 (основных корпусов) между собой, образуя различные конфигурации МНПА;
посредством планок Пикатинни 14.1-14.n смонтирован дополнительный герметичный модуль, представляющий собой аккумуляторный отсек, с возможностью использования как внутреннего источника энергоснабжения (аккумулятора) 7.1, 7.2, так и внешнего источника энергоснабжения (аккумулятора) 7.1, 7.2;
устройство отображения информации 13 выполнено в виде отдельного устройства, с возможностью осуществления связи по беспроводному каналу с пультом управления 6 и представляет собой, мобильный телефон, айфон, компьютер или очки виртуальной реальности;
в качестве полезной нагрузки 4.1-4.n используются манипуляторы различных типов;
в качестве полезной нагрузки 4.1-4.n используются специализированные датчики экологического мониторинга различных типов и назначения;
на надводном модуле 5 в качестве источника энергоснабжения 7.2, 7.3 используется солнечная батарея;
на надводном модуле 5 установлен световой 18 или звуковой датчик для визуального или акустического определения его местоположения в ночное время суток;
на подводном 1, надводном модуле 5 и пульте управления 6 находятся системы контроля состояния источников энергоснабжения (контроллеры заряда-разряда);
на подводном модуле 1 размещен доплеровский лаг для измерения скорости;
на подводном модуле 1 размещен блок комплексирования барометрических и ультразвуковых датчиков измерения глубины;
связь между надводным 1 и подводным модулем 5 осуществляется по гидроакустическому каналу связи, приемо-передающие модули которых крепятся на планки Пикатинни 14.1-14.n;
на планки Пикатинни 14.1-14.n крепится видеокамера, с возможностью осуществления режима виртуального перископа;
видеокамера установлена на подводном модуле 1 на манипуляторе, обладающем двумя или тремя степенями свободы;
надводный модуль 5 выполняет роль буксировщика подводного модуля 1;
зарядка источника электроэнергии 7.1 подводного модуля 1 осуществляется бесконтактным (индукционным) способом;
на надводном модуле 5 размещен парус для его перемещения.
Пример №1 исполнения приведен на фиг. 2.
Пример №2 исполнения приведен на фиг. 3.
Пример №3 исполнения приведен на фиг. 4.
Пример №4 исполнения приведен на фиг. 5.
Пример №5 исполнения приведен на фиг. 6.
Изготовленный и прошедший испытания образец необитаемого подводного аппарата «Океаника-КИТ» (в телеуправляемом исполнении), выполненный по принципу морфологического куба, приведен на фиг. 7.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс для осуществления подводных работ | 2022 |
|
RU2785237C1 |
| Малогабаритный телеуправляемый подводный аппарат | 2021 |
|
RU2775894C1 |
| МАЛОГАБАРИТНЫЙ ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2008 |
|
RU2387570C1 |
| Автоматическое устройство для развертывания и свертывания донной антенны под водой и под ледовым покровом | 2016 |
|
RU2640896C1 |
| ТЕЛЕУПРАВЛЯЕМЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2024 |
|
RU2829517C1 |
| СОСТАВНОЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2021 |
|
RU2770623C1 |
| КОМБИНИРОВАННЫЙ ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2022 |
|
RU2809785C1 |
| Подводный аппарат | 2016 |
|
RU2703558C1 |
| УНИВЕРСАЛЬНАЯ САМОХОДНАЯ СПУСКАЕМАЯ СИСТЕМА ОБСЛЕДОВАНИЯ И РЕМОНТА ОБЪЕКТОВ ГИДРОТЕХНИЧЕСКОЙ ИНФРАСТРУКТУРЫ | 2011 |
|
RU2468960C1 |
| БЫСТРОРАЗВЕРТЫВАЕМЫЙ КОМПЛЕКС ПОИСКА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2746060C1 |


Изобретение относится к области подводной морской техники, в частности к модульным необитаемым, преимущественно телеуправляемым, подводным аппаратам, которые могут быть применены в качестве игрового обучающего конструктора с широкой вариабельностью параметров, а также в различного рода подводных исследованиях. Предложен модульный необитаемый подводный аппарат, содержащий подводный модуль, в корпусе которого размещены первый источник электроэнергии, движители, электромеханическая и электронная аппаратура для перемещения модуля под водой, управляемые и неуправляемые стабилизаторы, полезная нагрузка, в том числе видеокамеры и осветители, и планки Пикатинни в качестве средств взаимосвязи, и конструктивно и функционально объединенный с подводным модулем надводный модуль с размещенными в нем вторым источником электроэнергии, блоком проводной связи, радиомодулями и блоками спутниковой системы навигации, связанный с подводным модулем проводной линией связи, при этом предусмотрена возможность радиосвязи надводного модуля с пультом управления с размещенными в нем третьим источником электроэнергии, органами управления, устройством отображения информации и радиомодулем, причем упомянутые планки Пикатинни установлены на корпусе подводного модуля и на них смонтировано перечисленное бортовое оборудование подводного модуля, включая упомянутую полезную нагрузку, управляемую систему переменного балласта для обеспечения плавучести аппарата в соленой и пресной воде, электропитание которой осуществляется через соответствующие группы электроразъемов, а надводный модуль дополнительно оснащен системой светозвуковой индикации. Техническим результатом являются упрощение конструкции, повышение надежности при обеспечении больших возможностей по построению финальной конструкций аппарата в зависимости от специфики решаемых задач, а также осуществление быстрой смены полезной нагрузки. 22 з.п. ф-лы, 7 ил.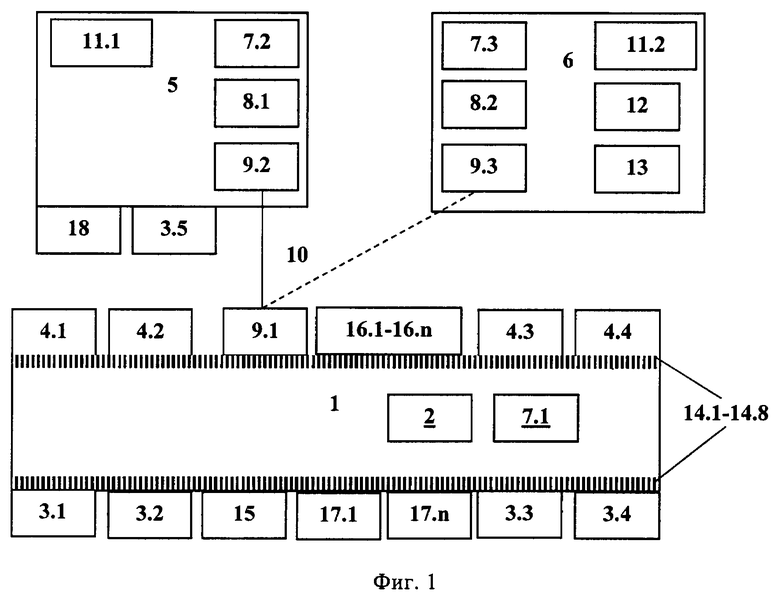
1. Модульный необитаемый подводный аппарат, содержащий подводный модуль, в корпусе которого размещены первый источник электроэнергии, движители, электромеханическая и электронная аппаратура для перемещения модуля под водой, управляемые и неуправляемые стабилизаторы, полезная нагрузка, в том числе видеокамеры и осветители, и планки Пикатинни в качестве средств взаимосвязи, и конструктивно и функционально объединенный с подводным модулем надводный модуль с размещенными в нем вторым источником электроэнергии, блоком проводной связи, радиомодулями и блоками спутниковой системы навигации, связанный с подводным модулем проводной линией связи, при этом предусмотрена возможность радиосвязи надводного модуля с пультом управления с размещенными в нем третьим источником электроэнергии, органами управления, устройством отображения информации и радиомодулем, отличающийся тем, что упомянутые планки Пикатинни установлены на корпусе подводного модуля и на них смонтировано перечисленное бортовое оборудование подводного модуля, включая упомянутую полезную нагрузку, управляемую систему переменного балласта для обеспечения плавучести аппарата в соленой и пресной воде, электропитание которой осуществляется через соответствующие группы электроразъемов, а надводный модуль дополнительно оснащен системой светозвуковой индикации.
2. Аппарат по п. 1, отличающийся тем, что движители выполнены с винтами и моторами для обеспечения движения по суше и под водой.
3. Аппарат по п. 1, отличающийся тем, что движители выполнены гусеничными или колесными для обеспечения движения по суше и под водой.
4. Аппарат по п. 1, отличающийся тем, что корпус подводного модуля выполнен цилиндрической, или эллиптической, или оживальной формы.
5. Аппарат по п. 1, отличающийся тем, что на планки Пикатинни прикреплены понтоны в обеспечение положительной плавучести с возможностью перемещения по водной поверхности.
6. Аппарат по п. 1, отличающийся тем, что на планках Пикатинни смонтированы датчики и видеокамеры в составе упомянутого бортового оборудования.
7. Аппарат по п. 1, отличающийся тем, что к корпусу подводного модуля в вертикальной и горизонтальной продольных плоскостях крепятся планки Пикатинни большей длины, чем в поперечных плоскостях, с возможностью размещения на них движителей, датчиков, видеокамер и осветителей.
8. Аппарат по п. 1, отличающийся тем, что посредством планок Пикатинни соединены несколько основных подводных модулей между собой с возможностью варьирования их взаимного пространственного расположения.
9. Аппарат по п. 1, отличающийся тем, что посредством планок Пикатинни смонтирован дополнительный герметичный модуль, представляющий собой аккумуляторный отсек, с возможностью использования как внутреннего, так и внешнего автономных источников энергоснабжения.
10. Аппарат по п. 1, отличающийся тем, что устройство отображения информации выполнено в виде отдельного устройства с возможностью осуществления связи по беспроводному каналу с пультом управления и представляет собой мобильный телефон, айфон, компьютер или очки виртуальной реальности.
11. Аппарат по п. 1, отличающийся тем, что в качестве полезной нагрузки используются манипуляторы.
12. Аппарат по п. 1, отличающийся тем, что в качестве полезной нагрузки используются специализированные датчики экологического мониторинга.
13. Аппарат по п. 1, отличающийся тем, что на надводном модуле в качестве источника энергоснабжения используется солнечная батарея.
14. Аппарат по п. 1, отличающийся тем, что на надводном модуле установлен световой или звуковой датчик для визуального или акустического определения местоположения аппарата в ночное время суток.
15. Аппарат по п. 1, отличающийся тем, что на подводном, надводном модуле и пульте управления находятся системы контроля состояния источников энергоснабжения - контроллеры заряда-разряда.
16. Аппарат по п. 1, отличающийся тем, что на подводном модуле размещен доплеровский лаг для измерения скорости.
17. Аппарат по п. 1, отличающийся тем, что на подводном модуле размещен блок комплексирования барометрических и ультразвуковых датчиков измерения глубины.
18. Аппарат по п. 1, отличающийся тем, что связь между надводным и подводным модулем осуществляется по гидроакустическому каналу связи, приемопередающие модули которых крепятся на планки Пикатинни.
19. Аппарат по п. 1, отличающийся тем, что на планки Пикатинни крепится видеокамера с возможностью осуществления режима виртуального перископа.
20. Аппарат по п. 1, отличающийся тем, что видеокамера установлена на подводном модуле на манипуляторе, обладающем двумя или тремя степенями свободы.
21. Аппарат по п. 1, отличающийся тем, что надводный модуль выполняет роль буксировщика подводного модуля.
22. Аппарат по п. 1, отличающийся тем, что зарядка источника энергоснабжения подводного модуля осуществляется бесконтактным способом.
23. Аппарат по п. 1, отличающийся тем, что на надводном модуле размещен парус для его перемещения.
| 0 |
|
SU193287A1 | |
| МОДУЛЬНЫЙ АВТОНОМНЫЙ НЕОБИТАЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2017 |
|
RU2667674C1 |
| CN 106564576 A, 19.04.2017 | |||
| CN 107902059 A, 13.04.2018 | |||
| 0 |
|
SU161175A1 | |
| Привод к независимым рейкам секций топливного насоса | 1959 |
|
SU130292A1 |
| US 8677920 B1, 25.03.2014. | |||

