Известны зажимные устройства для закрепления рабочих инструментов, прежде всего рабочих инструментов осциллирующих технологических машин, содержащие зажимной узел. При этом зажимной узел имеет стержневидный зажимной элемент для зажима рабочего инструмента в осевом направлении и расположенную на зажимном элементе зажимную головку.
Подобное зажимное устройство раскрыто в публикации ЕР 776634 А2.
Объектом настоящего изобретения является переносная технологическая машина, прежде всего переносная технологическая машина с приводимым в осциллирующее движение шпинделем, содержащая по меньшей мере одно зажимное устройство для закрепления рабочего инструмента, содержащее по меньшей мере один зажимной узел, имеющий по меньшей мере один стержневидный зажимной элемент для зажима рабочего инструмента в осевом направлении, а также имеющий по меньшей мере одну расположенную на зажимном элементе зажимную головку, имеющую по меньшей мере два подвижных относительно друг друга участка, и содержащее по меньшей мере один узел преобразования движения, предусмотренный для того, чтобы в зависимости от движения зажимного элемента, совершаемого по меньшей мере по существу в осевом направлении, перемещать по меньшей мере два подвижных относительно друг друга участка зажимной головки по меньшей мере в одном направлении, отличном от осевого направления, причем узел преобразования движения выполнен в виде разводного узла, предусмотренного для того, чтобы по меньшей мере в одном режиме работы зажимного узла перемещать по меньшей мере два подвижных относительно друг друга участка зажимной головки относительно друг друга в противоположных направлениях.
В соответствии с изобретением участки зажимной головки имеют поверхности зажима, которые при зажатии рабочего инструмента в осевом направлении зажимным узлом разведены, т.е. отведены в стороны друг от друга, так, что они прилегают меньшей мере к участку поверхности рабочего инструмента, и на рабочий инструмент действует в осевом направлении зажимное усилие.
В контексте изобретения выражение "предусмотренный" следует понимать как специально выполненный, рассчитанный и/или установленный для выполнения определенной функции. Под зажимным узлом здесь понимается, в частности, узел, который за счет геометрического и/или силового замыкания фиксирует рабочий инструмент в осевом направлении, т.е. от осевого смещения, в частности фиксирует рабочий инструмент на соответствующем держателе переносной технологической машины. Предпочтительно, чтобы в режиме закрепления рабочего инструмента зажимным узлом к рабочему инструменту было приложено зажимное усилие, действующее в осевом направлении. Под стержневидным зажимным элементом здесь понимается, в частности, зажимной элемент, который в установленном состоянии имеет продольную протяженность в осевом направлении, превышающую его поперечную протяженность в направлении, проходящем перпендикулярно осевому направлению. В частности, продольная протяженность зажимного элемента более чем вдвое, предпочтительно - более чем вчетверо и особенно предпочтительно - более чем вшестеро превышает его поперечную протяженность. Предпочтительно, чтобы стержневидный зажимной элемент был выполнен, по меньшей мере частично, в виде полого элемента. Особенно предпочтительным является исполнение зажимного элемента, при котором он имеет по меньшей мере два участка, выполненных в виде ножек и расположенных, по меньшей мере частично, на расстоянии друг от друга в направлении, проходящем по меньшей мере по существу перпендикулярно осевому направлению. Предпочтительно, чтобы зажимной элемент был расположен нетеряемым образом, т.е. с предохранением от его выпадения, в полом валу переносной технологической машины. Под осевым направлением здесь понимается, в частности, направление, предпочтительно проходящее по меньшей мере по существу параллельно оси возвратно-вращательного движения (поворота) и/или оси непрерывного вращения приводного вала и/или шпинделя переносной технологической машины, предусмотренного для приведения в движение рабочего инструмента этой технологической машины. Под по существу параллельной ориентацией определенного направления относительно направления отсчета, в частности в одной плоскости, здесь понимается, в частности, то, что указанное направление может иметь отклонение от направления отсчета, составляющее, в частности, менее 8°, предпочтительно - менее 5° и особенно предпочтительно - менее 2°.
Под зажимной головкой здесь понимается, в частности, элемент, имеющий по меньшей мере два участка с поверхностями зажима, которые для закрепления (зажатия) рабочего инструмента в осевом направлении прилегают по меньшей мере к участку поверхности рабочего инструмента и нагружают рабочий инструмент зажимным усилием в осевом направлении. Под узлом преобразования движения здесь понимается, в частности, узел, содержащий механизм, посредством которого движение первого элемента, в частности поступательное движение первого элемента, может преобразовываться в движение другого элемента, в частности в движение поворота и/или в поступательное движение другого элемента. В предпочтительном варианте осуществления изобретения узел преобразования движения позволяет преобразовывать поступательное движение зажимного элемента в движение поворота и/или в поступательное движение зажимной головки. Особенно предпочтительно, чтобы зажимная головка посредством узла преобразования движения перемещалась по меньшей мере в основном вдоль главной составляющей своего движения, проходящей по меньшей мере по существу перпендикулярно осевому направлению. Под по существу перпендикулярной ориентацией определенного направления относительно направления отсчета здесь понимается, в частности, то, что указанное направление и направление отсчета, в частности при их рассмотрении в одной плоскости, образуют между собой угол 90°, и максимальное отклонение от этого угла составляет, в частности, менее 8°, предпочтительно - менее 5° и особенно предпочтительно -менее 2°. Выражение "по существу вдоль" означает здесь, в частности, ориентацию определенного направления вдоль направления отсчета, при которой указанное направление может иметь отклонение от направления отсчета, составляющее, в частности, менее 8°, предпочтительно - менее 5° и особенно предпочтительно - менее 2°. Благодаря предлагаемому в изобретении исполнению зажимного устройства достигается простота реализации процесса закрепления рабочего инструмента. Кроме того, при осуществлении изобретения закрепление рабочего инструмента на соответствующем держателе переносной технологической машины, в частности на держателе рабочего инструмента переносной технологической машины с приводимым в осциллирующее движение шпинделем, достигается конструктивно простым образом.
В частном варианте осуществления изобретения узел преобразования движения может иметь по меньшей мере один преобразующий движение элемент, предусмотренный для того, чтобы по меньшей мере в режиме закрепления рабочего инструмента зажимным узлом перемещать зажимную головку по меньшей мере в одном направлении, отличном от осевого направления, для достижения осевого перекрытия зажимной головки и рабочего инструмента. Под режимом закрепления рабочего инструмента здесь понимается, в частности, состояние зажимного узла, в котором рабочий инструмент зафиксирован посредством зажимного элемента и/или зажимной головки. В частности, рабочий инструмент в режиме его закрепления зафиксирован зажимным узлом на держателе рабочего инструмента переносной технологической машины в осевом и/или радиальном направлении для обработки заготовок (обрабатываемых изделий или объектов). При этом особенно предпочтительно, чтобы рабочий инструмент был нагружен зажимным усилием в осевом направлении. Под радиальным направлением здесь понимается, в частности, направление, проходящее по меньшей мере по существу перпендикулярно осевому направлению. Предпочтительно, чтобы преобразующий движение элемент был выполнен отдельно от зажимного элемента и/или зажимной головки. Под осевым перекрытием здесь понимается, в частности, наложение или совмещение, в частности отдельных участков, по меньшей мере двух деталей в осевом направлении, в частности таким образом, что прямая пересекает в осевом направлении эти две детали. Предпочтительно, чтобы в режиме закрепления рабочего инструмента по меньшей мере одна поверхность зажима зажимной головки перекрывала в осевом направлении по меньшей мере один участок рабочего инструмента. Особенно предпочтительно, чтобы это перекрытие в смонтированном состоянии зажимной головки можно было временно снимать, в частности для замены рабочего инструмента и/или для изменения положения рабочего инструмента, в частности изменения его углового положения. Этим выгодно достигается безынструментальное, т.е. осуществляемое без использования вспомогательного инструмента, закрепление и/или отсоединение рабочего инструмента. Таким образом, изобретение в этом варианте его осуществления позволяет обходиться без вспомогательного инструмента для закрепления и/или для отсоединения рабочего инструмента технологической машины. Кроме того, установка и/или закрепление рабочего инструмента на соответствующем держателе переносной технологической машины может выполняться изолированно от извлечения и/или демонтажа зажимного элемента, т.е. эти процессы могут быть развязаны.
Целесообразно, чтобы преобразующий движение элемент был выполнен в виде пальца. Под пальцем здесь понимается, в частности, элемент, имеющий продольную протяженность, превышающую поперечную протяженность, проходящую перпендикулярно продольной протяженности. В предпочтительном варианте осуществления изобретения палец выполнен цилиндрическим. Особенно предпочтительным является выполнение пальца вращательно-симметричным относительно по меньшей мере одной оси. Предпочтительно, чтобы палец был выполнен из сплошного материала. Вместе с тем, преобразующий движение элемент может иметь и другое исполнение, подходящее с точки зрения специалиста. В этом варианте обеспечивается простота конструкции преобразующего движение элемента. В частности, в случае выполнения пальца цилиндрическим особенно эффективно обеспечивается скольжение по меньшей мере одного участка зажимной головки по преобразующему движение элементу при движении зажимной головки, совершаемом вследствие движения зажимного элемента. В этом варианте осуществления изобретения предлагаемое в изобретении зажимное устройство для закрепления рабочего инструмента характеризуется материалосберегающим - в отношении минимизации изнашивания сопряженных деталей - исполнением. Соответственно, при этом достигается большой срок службы предлагаемого в изобретении зажимного устройства.
Предпочтительно, чтобы зажимная головка была расположена на зажимном элементе пружинящим образом. Под выражением "расположена пружинящим образом" здесь понимается, в частности, бесшарнирное упругоэластичное присоединение одного элемента к другому элементу, при котором относительное движение элементов может совершаться изолированно от какого-либо шарнира вследствие упругого отклонения или смещения элементов относительно друг друга. Расположение зажимной головки пружинящим образом, или с обеспечением ее пружинения, предпочтительно реализуется за счет специальных свойств материалов и/или специальной геометрии зажимной головки и зажимного элемента. В частности, зажимная головка может упруго отклоняться относительно зажимного элемента более чем на 1 мм, предпочтительно - более чем на 2 мм и особенно предпочтительно - более чем на 5 мм. Преимуществом этого варианта осуществления изобретения является конструктивно простое обеспечение подвижности зажимной головки относительно зажимного элемента.
Кроме того, узел преобразования движения может включать в себя по меньшей мере один кулачковый профиль (кулачок), в который по меньшей мере частично входит преобразующий движение элемент. Под кулачковым профилем здесь понимается, в частности, элемент кулачкового механизма. Под кулачковым механизмом здесь понимается, в частности, механизм, который вследствие движения кулачка, или кулачкового профиля, и вследствие взаимодействия последнего с преобразующим движение элементом управляет конструктивным элементом, который за счет взаимодействия кулачкового профиля и преобразующего движение элемента совершает заданное перемещение. В этом варианте осуществления изобретения движение одного элемента может преобразовываться в движение другого элемента конструктивно простым образом. Таким образом можно получить простое в управлении зажимное устройство для закрепления рабочего инструмента.
Предпочтительно, чтобы кулачковый профиль был расположен на зажимном элементе. Особенно предпочтительным является выполнение кулачкового профиля в виде паза. Такой паз образован, в частности, выемкой в зажимном элементе. В предпочтительном варианте своего выполнения кулачковый профиль имеет меньшую толщину материала по сравнению с примыкающей к нему областью зажимного элемента, в частности толщину 0 мм. Вместе с тем, возможен вариант выполнения кулачкового профиля (кулачка), в котором на наружной поверхности зажимного элемента расположено по меньшей мере два ребра, между которыми по меньшей мере частично входит преобразующий движение элемент. При этом по меньшей мере два ребра могут, в частности, выступать, начиная от указанной наружной поверхности по меньшей мере по существу перпендикулярно в направлении от зажимного элемента, вследствие чего эти по меньшей мере два ребра могут образовывать направляющую для преобразующего движение элемента. Возможны и другие целесообразные с точки зрения специалиста формы выполнения кулачкового профиля. Преобразующий движение элемент предпочтительно проходит через кулачковый профиль насквозь, в частности в направлении по меньшей мере по существу перпендикулярном осевому направлению. Под прохождением преобразующего движение элемента "насквозь" здесь понимается, в частности, то, что преобразующий движение элемент имеет главную протяженность в радиальном направлении, проходящем по меньшей мере по существу перпендикулярно осевому направлению, превышающую протяженность кулачкового профиля в радиальном направлении, проходящем по меньшей мере по существу перпендикулярно осевому направлению. Преимуществом этого варианта осуществления изобретения является уменьшение потребного монтажного пространства. Таким образом можно получить компактное зажимное устройство для закрепления рабочего инструмента.
Далее, по меньшей мере зажимная головка может иметь по меньшей мере два подвижных относительно друг друга участка. Предпочтительно, чтобы относительная подвижность двух таких участков обеспечивалась упругостью материала зажимной головки и/или ее специальной геометрией. Предпочтительно, чтобы указанные два участка были подвижными относительно друг друга вследствие пружинящего соединения зажимной головки с зажимным элементом. В альтернативном исполнении предлагаемого в изобретении зажимного устройства для закрепления рабочего инструмента зажимной элемент также имеет два подвижных относительно друг друга участка. При этом участки зажимного элемента установлены с возможностью поворота относительно друг друга. При этом особенно предпочтительно, чтобы один участок зажимной головки был выполнен за одно целое с соответствующим участком зажимного элемента. Преимуществом этого варианта осуществления изобретения является возможность симметричного крепления рабочего инструмента, в частности на соответствующем держателе переносной технологической машины.
Как указано выше, узел преобразования движения выполнен в виде разводного узла, предусмотренного для того, чтобы по меньшей мере в одном режиме работы зажимного узла перемещать по меньшей мере два подвижных относительно друг друга участка зажимной головки относительно друг друга в противоположных направлениях, т.е. разводить эти участки. Предпочтительно, чтобы участки зажимной головки и/или зажимного элемента перемещались вдоль главной составляющей своего движения, проходящей по меньшей мере по существу перпендикулярно осевому направлению. В этом варианте осуществления изобретения перемещение двух участков зажимной головки и/или зажимного элемента достигается конструктивно простым образом.
Предпочтительно, чтобы зажимная головка была выполнена за одно целое с зажимным элементом. Под выполнением за одно целое здесь понимается, в частности, по крайней мере, неразъемное (обеспечиваемое силами межмолекулярного или межатомного сцепления) соединение, например сварное, клеевое соединение, приформовывание методом литья под давлением и/или применение иного подходящего с точки зрения специалиста метода соединения, и/или, что предпочтительно, выполнение в виде одного изделия, например путем изготовления из одной отливки и/или путем изготовления методом одно- или многокомпонентного литья под давлением и, что предпочтительно, из одной заготовки. При этом сокращаются затраты на выполнение монтажа (сборки).
Под переносной технологической машиной здесь понимается, в частности, технологическая машина, прежде всего ручная машина, которую оператор может транспортировать без использования для этого транспортных машин. Переносная технологическая машина имеет массу, составляющую, в частности, менее 40 кг, предпочтительно - менее 10 кг и особенно предпочтительно - менее 5 кг. При этом достигается высокий уровень удобства управления для оператора технологической машины.
Предлагаемая в изобретении переносная технологическая машина с зажимным устройством для закрепления рабочего инструмента при этом не ограничивается описанным выше применением и примером осуществления изобретения. В частности, зажимное устройство для реализации описанного здесь принципа действия может включать в себя отдельные элементы, детали и узлы в количестве, отличном от указанного в данном описании.
Другие преимущества изобретения выявляются в нижеследующем описании его осуществления, поясняемом чертежами. На чертежах в качестве примеров представлены варианты осуществления изобретения. На чертежах, в описании и в формуле изобретения многочисленные признаки содержатся в определенной комбинации. Исходя из целесообразности, специалист сможет также рассматривать эти признаки в отдельности и объединять их в другие рациональные комбинации. На чертежах показано:
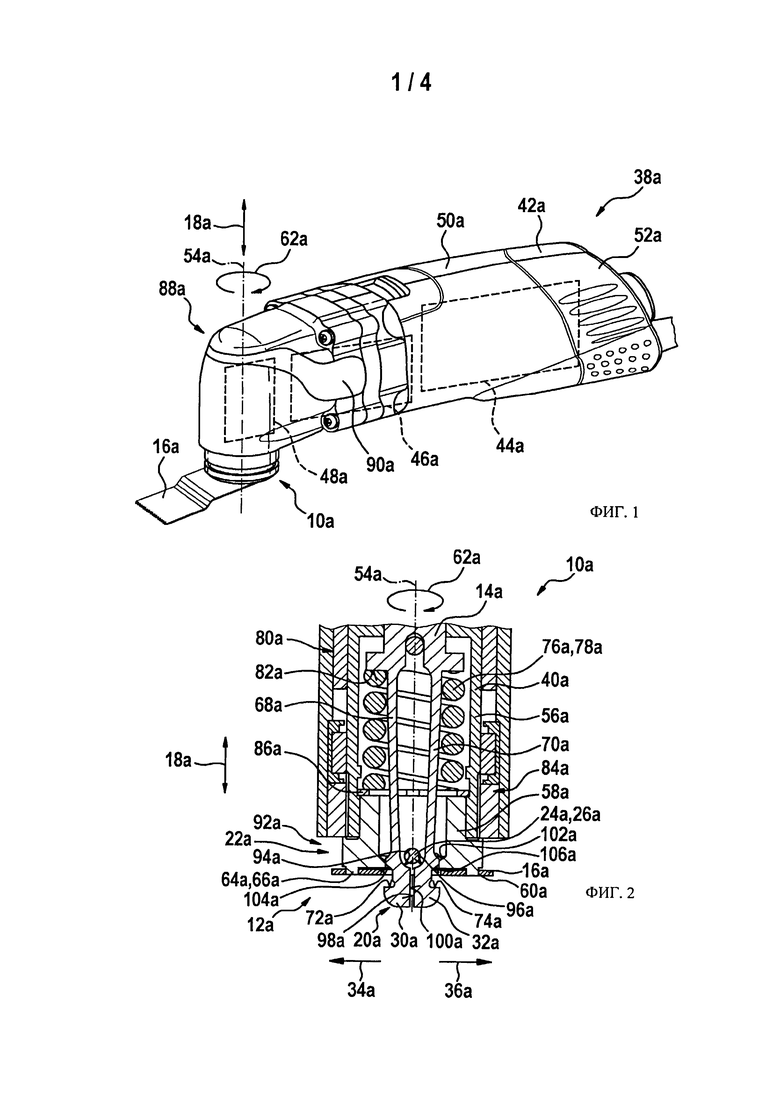
на фиг. 1 - схематическое изображение предлагаемой в изобретении технологической машины с предлагаемым в изобретении зажимным устройством для закрепления рабочего инструмента,
на фиг. 2 - схематическое подробное изображение предлагаемого в изобретении зажимного устройства для закрепления рабочего инструмента в режиме замены рабочего инструмента в зажимном узле этого зажимного устройства,
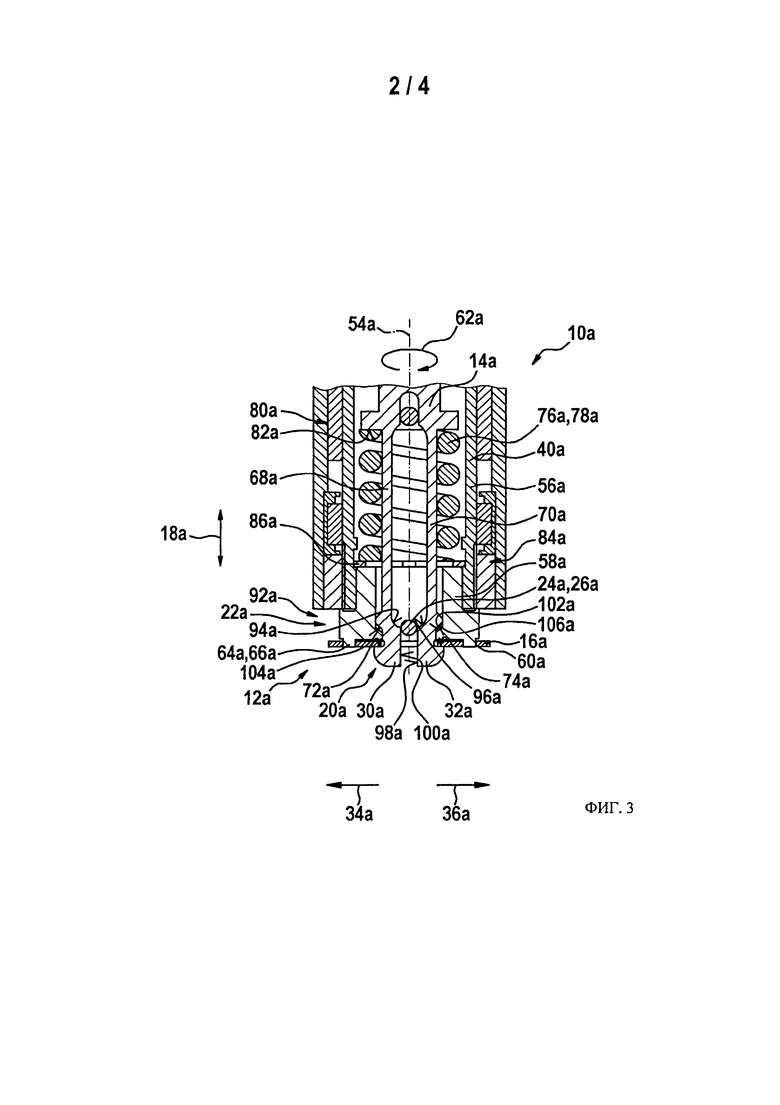
на фиг. 3 - схематическое подробное изображение предлагаемого в изобретении зажимного устройства для закрепления рабочего инструмента в режиме закрепления рабочего инструмента зажимным узлом,
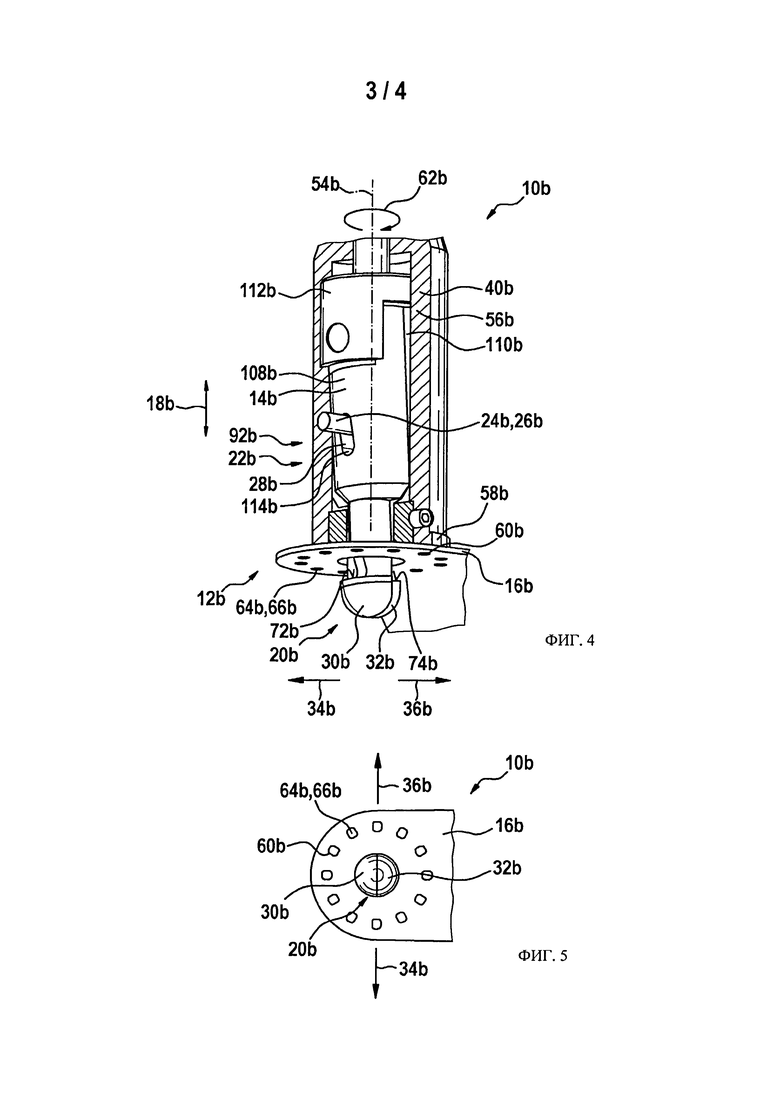
на фиг. 4 - схематическое подробное изображение альтернативного предлагаемого в изобретении зажимного устройства для закрепления рабочего инструмента в режиме замены рабочего инструмента в зажимном узле этого альтернативного зажимного устройства,
на фиг. 5 - схематическое подробное изображение зажимной головки зажимного узла альтернативного предлагаемого в изобретении зажимного устройства для закрепления рабочего инструмента в режиме замены рабочего инструмента в зажимном узле,
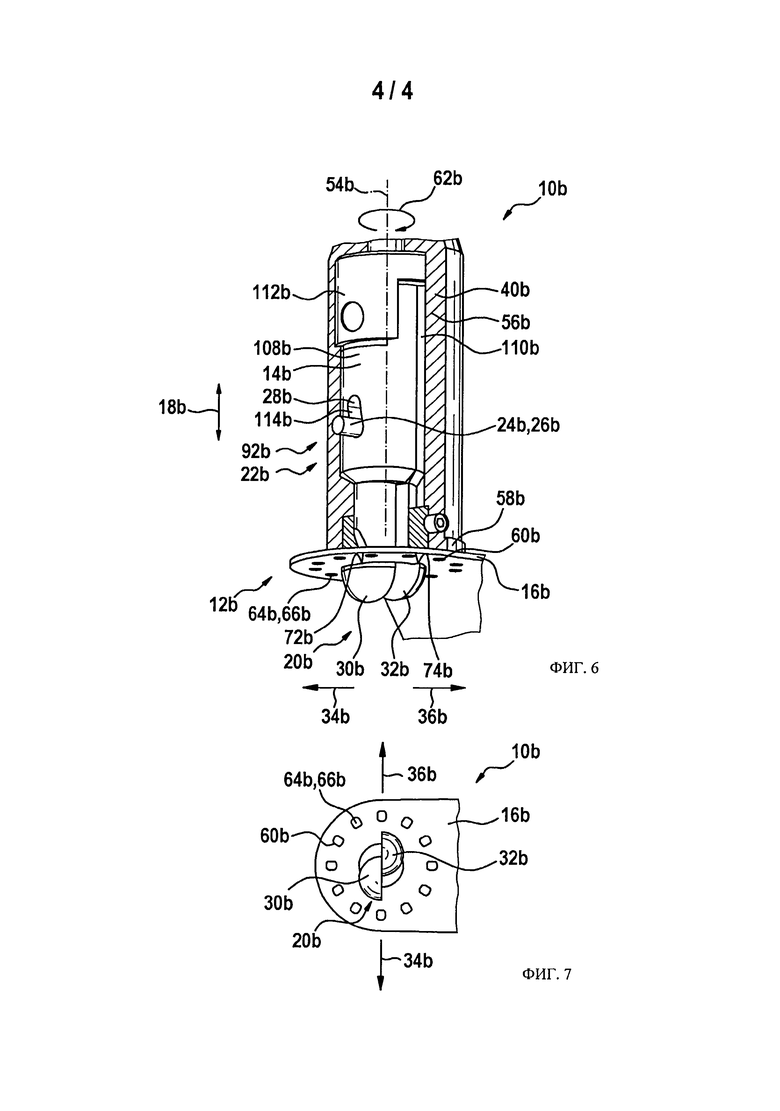
на фиг. 6 - схематическое подробное изображение показанного на фиг. 4 альтернативного предлагаемого в изобретении зажимного устройства для закрепления рабочего инструмента в режиме закрепления рабочего инструмента зажимным узлом и
на фиг. 7 - схематическое подробное изображение зажимной головки зажимного узла альтернативного предлагаемого в изобретении зажимного устройства для закрепления рабочего инструмента в режиме закрепления рабочего инструмента зажимным узлом.
На фиг. 1 показана переносная электрическая технологическая машина 38а с зажимным устройством 10а для закрепления ее рабочего инструмента. Переносная технологическая машина 38а имеет корпус 42а, содержащий в себе узел 44а электродвигателя, передаточный механизм 46а и ведомый узел 48а переносной технологической машины 38а. При этом корпус 42а технологической машины имеет две корпусные полуоболочки 50а, 52а, соединенные друг с другом разъемным образом вдоль плоскости, проходящей через осевое направление 18а. Вместе с тем, корпус 42а технологической машины может иметь две или более горшкообразных корпусных частей, соединяемых друг с другом разъемным образом. Осевое направление 18а проходит вдоль и/или параллельно оси 54а вращения выполненного в качестве шпинделя 40а полого вала 56а ведомого узла 48а (фиг. 2). Полый вал 56а предусмотрен для того, чтобы приводить установленный рабочий инструмент 16а в осциллирующее (в частности возвратно-вращательное) движение. Приведение рабочего инструмента 16а в осциллирующее движение происходит при этом известным специалисту образом, например посредством эксцентрически расположенной на приводном валу узла 44а электродвигателя цапфы (на чертежах не показана) передаточного механизма 46а, которая посредством качающегося рычага и сопряженной с ним втулки (на чертежах не показаны) передаточного механизма 46а приводит полый вал 56а в движение во время работы переносной технологической машины 38а. Таким образом, выполненный в качестве шпинделя 40а полый вал 56а приводится в осциллирующее движение. Рабочий инструмент 16а закрепляется на соответствующем держателе 58а ведомого узла 48а для механической обработки заготовок со снятием их материала. Держатель 58а рабочего инструмента соединен за счет геометрического и/или силового замыкания с полым валом 56а жестко на кручение, т.е. с фиксацией от проворачивания относительно него. Вместе с тем, держатель 58а рабочего инструмента также может быть выполнен за одно целое с полым валом 56а. Это позволяет передавать возвратно-вращательное движение полого вала 56а на держатель 58а рабочего инструмента.
На фиг.2 приведено подробное изображение зажимного устройства 10a для закрепления рабочего инструмента в режиме замены рабочего инструмента, в котором оператор может устанавливать рабочий инструмент 16a на держателе 58a рабочего инструмента и/или изменять положение рабочего инструмента 16a в окружном направлении 62a относительно держателя 58a рабочего инструмента. Для жесткого на кручение крепления рабочего инструмента 16a на держателе 58a рабочий инструмент 16a имеет передающие вращение выемки 60a, расположенные в рабочем инструменте 16a на окружности и равномерно распределенные в окружном направлении 62a. Рабочий инструмент 16a имеет в общей сложности двенадцать передающих вращение выемок 60a (на чертеже показаны не все выемки), расположенных на окружности и равномерно распределенных в окружном направлении 62a. Вместе с тем рабочий инструмент 16a также может иметь отличное от двенадцати число передающих вращение выемок 60a. Окружное направление 62a проходит в плоскости, перпендикулярной осевому направлению 18a. Держатель 58a рабочего инструмента имеет соответствующие передающим вращение выемкам 60a и подобные бугоркам выступы 64a, которые при установленном на держателе 58a рабочем инструменте 16a входят в осевом направлении 18a в передающие вращение выемки 60a. При этом подобные бугоркам выступы 64a выполнены в качестве стопорных выступов 66a. Держатель 58a рабочего инструмента имеет в общей сложности двенадцать стопорных выступов 66a (на чертеже показаны не все выступы), расположенных на окружности и равномерно распределенных в окружном направлении 62a. Вместе с тем, держатель 58a рабочего инструмента также может иметь отличное от двенадцати число стопорных выступов 66a.
Зажимное устройство 10a для закрепления рабочего инструмента содержит зажимной узел 12a. Зажимной узел 12a имеет стержневидный зажимной элемент 14a для зажима рабочего инструмента 16a в осевом направлении 18a (фиг.3). Зажимной элемент 14a подвижно расположен в полом валу 56a. При этом зажимной элемент 14a проходит в осевом направлении 18a через полый вал 56a насквозь. Таким образом, зажимной элемент 14a в собранном состоянии зажимного устройства установлен в полом валу 56a. Кроме того, зажимной элемент 14a имеет две ножки 68a, 70a, которые при установленном зажимном элементе 14a проходят по меньшей мере по существу в осевом направлении 18a. Ножки 68a, 70a выполнены за одно целое с зажимным элементом 14a. Кроме того, ножки 68a, 70a характеризуются малой толщиной материала, глядя в направлении, проходящем перпендикулярно осевому направлению 18a, для обеспечения возможности отклонения ножек 68a, 70a. Таким образом, ножки 68a, 70a за счет свойств их материала и/или их геометрической формы расположены на зажимном элементе 14a подвижно относительно друг друга. При этом ножки 68a, 70a расположены на зажимном элементе 14a пружинящим образом, т.е. с обеспечением их упругой деформации. Кроме того, ножки 68a, 70a расположены на расстоянии друг от друга в направлении, проходящем перпендикулярно осевому направлению 18a. Ножки 68a, 70a, благодаря их пружинящему расположению на зажимном элементе 14a и наличию зазора между ними в направлении, проходящем перпендикулярно осевому направлению 18a, могут перемещаться относительно друг друга.
Далее, зажимной узел 12a имеет зажимную головку 20a, расположенную на зажимном элементе 14a. При этом зажимная головка 20a выполнена за одно целое с зажимным элементом 14a. Зажимная головка 20a имеет два подвижных относительно друг друга участка 30a, 32a. Каждый из этих участков 30a, 32a расположен на соответствующей ножке 68a, 70a зажимного элемента 14a. При этом участки 30a, 32a зажимной головки 20a выполнены за одно целое с соответствующими ножками 68a, 70a зажимного элемента 14a. Таким образом, зажимная головка 20a посредством ножек 68a, 70a расположена на зажимном элементе 14a пружинящим образом. Также каждый из участков 30a, 32a имеет свою поверхность 72a, 74a зажима, которая в режиме закрепления рабочего инструмента зажимным узлом 12a прилегает для закрепления рабочего инструмента 16a в осевом направлении 18a по меньшей мере к одному участку поверхности рабочего инструмента 16a. Поверхности 72a, 74a зажима предусмотрены для того, чтобы в режиме закрепления рабочего инструмента нагружать рабочий инструмент 16a зажимным усилием, действующим в осевом направлении 18a.
Кроме того, зажимной узел 12a включает в себя упругий элемент 76a, предусмотренный для того, чтобы нагружать зажимной элемент 14a в осевом направлении 18a силой упругости. При этом упругий элемент 76a выполнен в виде пружины 78a сжатия. Вместе с тем, упругий элемент 76a может иметь любое другое целесообразное с точки зрения специалиста исполнение, например, может быть выполнен в виде пружины растяжения, тарельчатой пружины и т.д. Кроме того, зажимной узел 12a также может иметь более одного упругого элемента 76a для нагружения зажимного элемента 14a силой упругости. Зажимной элемент 14a в установленном состоянии проходит в осевом направлении 18a сквозь пружину 78a сжатия. Таким образом, пружина 78a сжатия расположена вокруг по меньшей мере одного участка зажимного элемента 14a, охватывая его в окружном направлении 62a. Пружина 78a сжатия в собранном состоянии зажимного устройства опирается одним концом 80a на контактную поверхность 82a зажимного элемента 14a. При этом контактная поверхность 82a выполнена кольцеобразной. Кроме того, другим своим концом 84a пружина 78a сжатия упирается в стопорное кольцо 86a, установленное на держателе 58a рабочего инструмента. Стопорное кольцо 86a предусмотрено для удержания пружины 78a сжатия в предварительно напряженном состоянии. При этом в собранном состоянии зажимного устройства стопорное кольцо 86a установлено в пазу, выполненном в полом валу 56a. Вышеупомянутый другой конец 84a расположен со стороны пружины 78a сжатия, противоположной той ее стороне, с которой пружина 78a сжатия опирается своим концом 80a на контактную поверхность 82a зажимного элемента 14a. Таким образом, пружина 78a сжатия расположена, глядя в осевом направлении 18a, между контактной поверхностью 82a зажимного элемента 14a и стопорным кольцом 86a, расположенным на держателе 58a рабочего инструмента. При этом стопорное кольцо 86a расположено со стороны держателя 58a рабочего инструмента, которая, глядя в осевом направлении 18a, противоположна установленному рабочему инструменту 16a, т.е. обращена от него.
Для воздействия на зажимной элемент 14a зажимной узел 12a имеет узел 88a управления (фиг.1). Узел 88a управления включает в себя рычаг 90a управления, установленный с возможностью поворота вокруг оси 54a вращения полого вала 56a. Кроме того, узел 88a управления имеет механизм (на чертежах не показан), предусмотренный для преобразования движения поворота рычага 90a управления вокруг оси 54a вращения в поступательное движение зажимного элемента 14a в осевом направлении 18a. При этом такой механизм может быть выполнен в виде передачи, кулачкового профиля (управляющего кулачка), сопряженного с толкателем, или других известных специалисту механизмов для преобразования движения поворота в поступательное движение. В режиме закрепления рабочего инструмента узел 88a управления известным специалисту образом изолирован (кинематически развязан) от осциллирующего движения, совершаемого зажимным элементом 14a во время работы переносной технологической машины 38a. В режиме замены рабочего инструмента узел 88a управления известным специалисту образом вступает во взаимодействие с зажимным элементом 14a и/или зажимной головкой 20a для снятия зажимного усилия. После снятия зажимного усилия, прикладываемого зажимным элементом 14a и/или зажимной головкой 20a, оператор может снять рабочий инструмент 16a с соответствующего держателя 58a.
Зажимное устройство 10a для закрепления рабочего инструмента также имеет узел 22a преобразования движения, предусмотренный для того, чтобы в зависимости от движения зажимного элемента 14a, совершаемого по меньшей мере по существу в осевом направлении 18a, перемещать зажимную головку 20a в направлении, отличном от осевого направления 18a. Посредством узла 22a преобразования движения зажимная головка 20a при этом поворачивается вокруг оси, проходящей перпендикулярно осевому направлению 18a. При этом зажимная головка 20a перемещается по меньшей мере по существу вдоль главного направления движения, проходящего по меньшей мере по существу перпендикулярно осевому направлению 18a. Узел 22a преобразования движения выполнен в виде разводного узла 92a, предусмотренного для того, чтобы в определенном режиме работы зажимного узла 12a перемещать два подвижных относительно друг друга участка 30a, 32a зажимной головки 20a относительно друг друга в противоположных направлениях 34a, 36a. При этом узел 22a преобразования движения имеет преобразующий движение элемент 24a, предусмотренный для того, чтобы в режиме закрепления рабочего инструмента зажимным узлом 12a перемещать зажимную головку 20a в направлении, отличном от осевого направления 18a, для достижения осевого перекрытия зажимной головки 20a и рабочего инструмента 16a. Преобразующий движение элемент 24a выполнен в виде пальца 26a. Вместе с тем, преобразующий движение элемент 24a также может быть выполнен в виде штифта и/или в виде разрезного штифта. Возможны и другие целесообразные с точки зрения специалиста формы выполнения преобразующего движение элемента 24a.
Для установки рабочего инструмента 16a на соответствующем держателе 58a рычаг 90a управления перемещается оператором из положения, в котором этот рычаг прилегает к корпусу 42a технологической машины, в направлении от корпуса 42a технологической машины, а соответственно, рычаг управления поворачивается вокруг оси 54a вращения. За счет этого зажимной элемент 14a перемещается в осевом направлении 18a по направлению к держателю 58a рабочего инструмента. Зажимной узел 12a оказывается при этом в режиме замены рабочего инструмента. Удерживая рычаг 90a управления повернутым вокруг оси 54a вращения, оператор может установить рабочий инструмент 16a на соответствующем держателе 58a. Вместе с тем, узел 88a управления может иметь стопорное приспособление (на чертежах не показано), предусмотренное для того, чтобы фиксировать рычаг 90a управления в определенном положении, например фиксировать рычаг 90a управления в положении, соответствующем режиму замены рабочего инструмента. Оператор надевает рабочий инструмент 16a центральным установочным отверстием на зажимную головку 20a, пока рабочий инструмент 16a не упрется в держатель 58a рабочего инструмента и пока стопорные выступы 66a держателя 58a рабочего инструмента не окажутся в передающих вращение выемках 60a рабочего инструмента 16a. За счет этого рабочий инструмент 16a в режиме его закрепления зажимным узлом 12a будет зафиксирован на держателе от проворачивания в окружном направлении 62a. После снятия оператором усилия с рычага 90a управления, т.е. после отпускания рычага оператором, рычаг 90a управления под действием силы упругости пружины 78a сжатия, которая воздействует на рычаг 90a управления через механизм для преобразования движения поворота рычага 90a управления в поступательное движение зажимного элемента 14a, перемещается в свое исходное положение по направлению к корпусу 42a технологической машины. В результате зажимной узел 12a переходит в режим закрепления рабочего инструмента.
При движении зажимного элемента 14a в осевом направлении 18a в сторону от держателя 58a рабочего инструмента два участка 30a, 32a зажимной головки 20a перемещаются к выполненному в виде пальца 26a преобразующему движение элементу 24a узла 22a преобразования движения, выполненного в виде разводного узла 92a. Как только участки 30a, 32a зажимной головки во время своего перемещения в осевом направлении 18a войдут в контакт с пальцем 26a, поверхности 94a, 96a скольжения соответствующих участков 30a, 32a зажимной головки начнут скользить по наружной поверхности пальца 26a. Поверхности 94a, 96a скольжения имеют форму дуг, в частности дуг окружности. Кроме того, поверхности 94а, 96а скольжения расположены на обращенной к пружине 78а сжатия стороне участков 30а, 32а зажимной головки. Участки 30а, 32а зажимной головки вследствие движения последней в осевом направлении 18а и скольжения поверхностей 94а, 96а скольжения по наружной поверхности пальца 26а перемещаются в противоположных друг другу направлениях 34а, 36а, т.е. раздвигаются в стороны друг от друга, пока палец 26а вследствие движения зажимного элемента 14а не окажется между участками 30а, 32а зажимной головки, прилегая к поверхностям 98а, 100а распора соответствующих участков 30а, 32а. В режиме закрепления рабочего инструмента палец 26а расположен, глядя в направлении, проходящем перпендикулярно осевому направлению 18а, между поверхностями 98а, 100а распора участков 30а, 32а зажимной головки. Таким образом, зажимная головка 20а разводится за счет распирания ее участков преобразующим движение элементом 24а. После завершения процесса зажатия рабочего инструмента поверхности 72а, 74а зажима соответствующих участков 30а, 32а зажимной головки прилегают к участкам поверхности рабочего инструмента 16а и нагружают рабочий инструмент 16а зажимным усилием, т.е. поджимают рабочий инструмент, в осевом направлении 18а по направлению к держателю 58а рабочего инструмента.
При размыкании зажимного узла 12а зажимной узел 12а переводится оператором из режима закрепления рабочего инструмента в режим замены рабочего инструмента. При этом рычаг 90а управления перемещается оператором из исходного положения в направлении от корпуса 42а технологической машины, поворачиваясь вокруг оси 54а вращения. Зажимной элемент 14а при этом перемещается в осевом направлении 18а по направлению к держателю 58а рабочего инструмента. Вследствие движения зажимного элемента 14а в осевом направлении 18а по направлению к держателю 58а рабочего инструмента поверхности 98а, 100а распора участков 30а, 32а зажимной головки скользят по наружной поверхности пальца 26а, пока палец 26а не выйдет из сопряжения с поверхностями 98а, 100а распора. Участки 30а, 32а зажимной головки вследствие их пружинящего расположения на зажимном элементе 14а перемещаются друг к другу, или сводятся. Для содействия этому движению участков 30а, 32а зажимной головки узел 22а преобразования движения имеет наклонную поверхность 102а, выполненную соответствующей наклонным поверхностям 104а, 106а участков 30а, 32а зажимной головки. Как только палец 26a выйдет из сопряжения с поверхностями 98a, 100a распора, наклонная поверхность 102a узла 22a преобразования движения и наклонные поверхности 104a, 106a участков 30a, 32a зажимной головки 20a войдут в контакт друг с другом. Посредством взаимодействия наклонной поверхности 102a узла 22a преобразования движения и наклонных поверхностей 104a, 106a участков 30a, 32a зажимной головки и вследствие движения зажимного элемента 14a, совершаемого в осевом направлении 18a по направлению к держателю 58a рабочего инструмента, участки 30a, 32a зажимной головки дополнительно перемещаются друг к другу. При этом осевое перекрытие поверхностей 72a, 74a зажима участков 30a, 32a зажимной головки и рабочего инструмента 16a, т.е. их наложение, или расположение друг над другом, в осевом направлении 18a, снимается. Таким образом, рабочий инструмент 16a можно снять с соответствующего держателя 58a.
На фиг.4-7 представлен альтернативный вариант осуществления изобретения. Остающиеся в основном неизменными детали, признаки и функции обозначены в принципе теми же номерами позиций. Для проведения различий между вариантами осуществления изобретения номера позиций на чертежах снабжены, соответственно представленным на этих чертежах вариантам, буквами "a" и "b". Нижеследующее описание ограничивается в основном отличиями от первого варианта осуществления изобретения, показанного на фиг.1-3, причем в отношении остающихся неизменными элементов конструкции, признаков и функций можно обращаться к описанию первого варианта осуществления изобретения, показанного на фиг.1-3.
На фиг.4 приведено подробное изображение зажимного устройства 10b для закрепления рабочего инструмента в режиме замены рабочего инструмента в зажимном узле 12b этого зажимного устройства 10b. Зажимное устройство 10b для закрепления рабочего инструмента расположено в переносной технологической машине (на чертежах не показана), имеющей конструкцию, аналогичную конструкции переносной технологической машины 38a, показанной на фиг.1. Зажимной узел 12b содержит стержневидный зажимной элемент 14b для зажима рабочего инструмента 16b в осевом направлении 18b, а также расположенную на зажимном элементе 14b зажимную головку 20b. Кроме того, зажимное устройство 10b для закрепления рабочего инструмента имеет узел 22b преобразования движения, предусмотренный для того, чтобы в зависимости от движения зажимного элемента 14b, совершаемого по меньшей мере по существу в осевом направлении 18b, перемещать зажимную головку 20b по меньшей мере в одном направлении, отличном от осевого направления 18b.
Зажимной элемент 14b содержит два подвижных относительно друг друга участка 108b, 110b. Участки 108b, 110b зажимного элемента 14b расположены в выполненном в виде полого вала 56b шпинделе 40b переносной технологической машины с возможностью поворота вокруг оси, проходящей перпендикулярно осевому направлению 18b. Кроме того, участки 108b, 110b зажимного элемента установлены в полом валу 56b подвижно в осевом направлении 18b. Зажимной элемент 14b подвижно установлен на передаточном элементе 112b зажимного узла 12b. Передаточный элемент 112b предусмотрен для того, чтобы передавать движение органа управления, входящего в состав узла управления (на чертежах не показан) зажимного узла 12b, на зажимной элемент 14b.
Зажимная головка 20b также имеет два подвижных относительно друг друга участка 30b, 32b. Каждый из участков 30b, 32b зажимной головки 20b выполнен за одно целое с соответствующим участком 108b, 110b зажимного элемента 14b. Кроме того, участки 30b, 32b зажимной головки 20b расположены на соответствующих участках 108b, 110b зажимного элемента 14b эксцентрически. При этом каждый из участков 30b, 32b зажимной головки 20b имеет эксцентриситет относительно продольной оси соответствующего участка 108b, 110b зажимного элемента 14b, которая по меньшей мере в одном рабочем состоянии проходит по меньшей мере по существу параллельно осевому направлению 18b.
Кроме того, узел 22b преобразования движения содержит преобразующий движение элемент 24b, предусмотренный для того, чтобы по меньшей мере в режиме закрепления рабочего инструмента зажимным узлом 12b перемещать зажимную головку 20b по меньшей мере в одном направлении, отличном от осевого направления 18b, для достижения осевого перекрытия зажимной головки 20b и рабочего инструмента 16b. Преобразующий движение элемент 24b выполнен в виде пальца 26b. Кроме того, узел 22b преобразования движения включает в себя по меньшей мере один кулачковый профиль 28b, в который частично входит преобразующий движение элемент 24b. Таким образом, узел 22b преобразования движения образован кулачковым механизмом. При этом кулачковый механизм выполнен в виде разводного узла 92b, предусмотренного для того, чтобы по меньшей мере в одном режиме работы зажимного узла 12b перемещать два подвижных относительно друг друга участка 30b, 32b зажимной головки 20b относительно друг друга в противоположных направлениях 34b, 36b.
Кулачковый профиль 28b расположен на зажимном элементе 14b. Каждый из участков 108b, 110b зажимного элемента 14b содержит соответствующий кулачковый профиль 28b (на чертежах показан только один кулачковый профиль). Кулачковые профили 28b выполнены в виде кулисообразных пазов 114b (на чертежах показан только один паз) в участках 108b, 110b зажимного элемента 14b. Вместе с тем, кулачковые профили 28b могут иметь иное целесообразное с точки зрения специалиста исполнение. Пазы 114b предусмотрены для того, чтобы за счет взаимодействия с преобразующим движение элементом 24b задавать движение соответствующих участков 108b, 110b зажимного элемента 14b в зависимости от движения последнего в осевом направлении 18b. В собранном состоянии зажимного устройства преобразующий движение элемент 24b проходит через пазы 114b участков 108b, 110b зажимного элемента насквозь в направлении, перпендикулярном осевому направлению 18b. Преобразующий движение элемент 24b неподвижно соединен с полым валом 56b.
При установке рабочего инструмента 16b зажимной узел 12b находится в режиме замены рабочего инструмента. При этом участки 108b, 110b зажимного элемента 14b, как следствие состояния узла 22b преобразования движения, повернуты относительно друг друга. Таким образом, продольные оси участков 108b, 110b зажимного элемента ориентированы под углом к осевому направлению 18b. Участки 30b, 32b зажимной головки 20b вследствие их эксцентрического расположения на участках 108b, 110b зажимного элемента 14b в зоне поверхностей 72b, 74b зажима участков 30b, 32b зажимной головки расположены концентрически по отношению к осевому направлению 18b (фиг.5). Оператор таким образом может установить рабочий инструмент 16b на соответствующем держателе 58b переносной технологической машины. При этом рабочий инструмент 16b надевается центральным установочным отверстием на зажимную головку 20b, пока рабочий инструмент 16b не упрется в держатель 58b рабочего инструмента и пока выступы 64b держателя 58b рабочего инструмента не окажутся в передающих вращение выемках 60b рабочего инструмента 16b.
На фиг.6 зажимной узел 12b показан в режиме закрепления рабочего инструмента. При переводе зажимного узла 12b из режима замены рабочего инструмента в режим закрепления рабочего инструмента участки 108b, 110b зажимного элемента 14b во время движения последнего в осевом направлении 18b за счет взаимодействия преобразующего движение элемента 24b и кулачковых профилей 28b поворачиваются относительно друг друга. При этом участки 108b, 110b зажимного элемента при движении зажимного элемента 14b в направлении от держателя 58b рабочего инструмента вследствие геометрии кулачковых профилей 28b поворачиваются друг к другу, или сводятся. В режиме закрепления рабочего инструмента продольные оси участков 108b, 110b зажимного элемента ориентированы параллельно осевому направлению 18b. Таким образом, участки 108b, 110b зажимного элемента по меньшей мере по существу полностью перекрываются в направлении, проходящем перпендикулярно осевому направлению 18b. При этом наружные кромки участков 108b, 110b совмещаются друг с другом в направлении, проходящем перпендикулярно осевому направлению 18b.
При повороте участков 108b, 110b зажимного элемента 14b участки 30b, 32b зажимной головки 20b перемещаются относительно друг друга в противоположных направлениях 34b, 36b, т.е. разводятся. Участки 30b, 32b зажимной головки 20b перемещаются в основном вдоль главной составляющей движения, ориентированной перпендикулярно осевому направлению 18b. Вследствие движения участков 30b, 32b зажимной головки 20b поверхности 72b, 74b зажима этих участков 30b, 32b прилегают к рабочему инструменту 16b. Таким образом, в режиме закрепления рабочего инструмента на рабочий инструмент 16b передается действующее в осевом направлении 18b зажимное усилие. В режиме закрепления рабочего инструмента участки 30b, 32b зажимной головки 20b расположены, вследствие их эксцентрического расположения на участках 108b, 110b зажимного элемента, со смещением относительно друг друга (фиг.7).
Изобретение относится к конструкции переносных технологических машин, прежде всего переносных технологических машин с приводимым в осциллирующее движение шпинделем. Переносная машина содержит по меньшей мере одно зажимное устройство для закрепления рабочего инструмента. Зажимное устройство содержит по меньшей мере один зажимной узел (12а; 12b), имеющий по меньшей мере один стержневидный зажимной элемент (14а; 14b) для зажима рабочего инструмента (16а; 16b) в осевом направлении (18а; 18b), и по меньшей мере одну расположенную на зажимном элементе (14а; 14b) зажимную головку (20а; 20b), имеющую по меньшей мере два подвижных относительно друг друга участка (30а, 32а; 30b, 32b). Кроме того, зажимное устройство содержит по меньшей мере один узел (22а; 22b) преобразования движения для перемещения в зависимости от движения зажимного элемента (14а; 14b), совершаемого по меньшей мере по существу в осевом направлении (18а; 18b), по меньшей мере двух подвижных относительно друг друга участков (30а, 32а; 30b, 32b) зажимной головки (20а; 20b) по меньшей мере в одном направлении, отличном от осевого направления (18а; 18b). Узел (22а; 22b) преобразования движения выполнен в виде разводного узла (92а; 92b) для того перемещения по меньшей мере в одном режиме работы зажимного узла (12а; 12b) по меньшей мере двух подвижных относительно друг друга участка (30а, 32а; 30b, 32b) зажимной головки (20а; 20b) относительно друг друга в противоположных направлениях (34а, 36а; 34b, 36b). Участки (30а, 32а; 30b, 32b) зажимной головки (20а; 20b) имеют поверхности (72а, 74а) зажима, которые при зажатии рабочего инструмента (16а; 16b) в осевом направлении зажимным узлом (12а; 12b) разведены с прилеганием по меньшей мере к участку поверхности рабочего инструмента (16а; 16b), и воздействием на рабочий инструмент (16а; 16b) в осевом направлении (18а; 18b) с зажимным усилием. Технический результат заключается в повышения срока эксплуатации технологической машины. 6 з.п. ф-лы, 7 ил.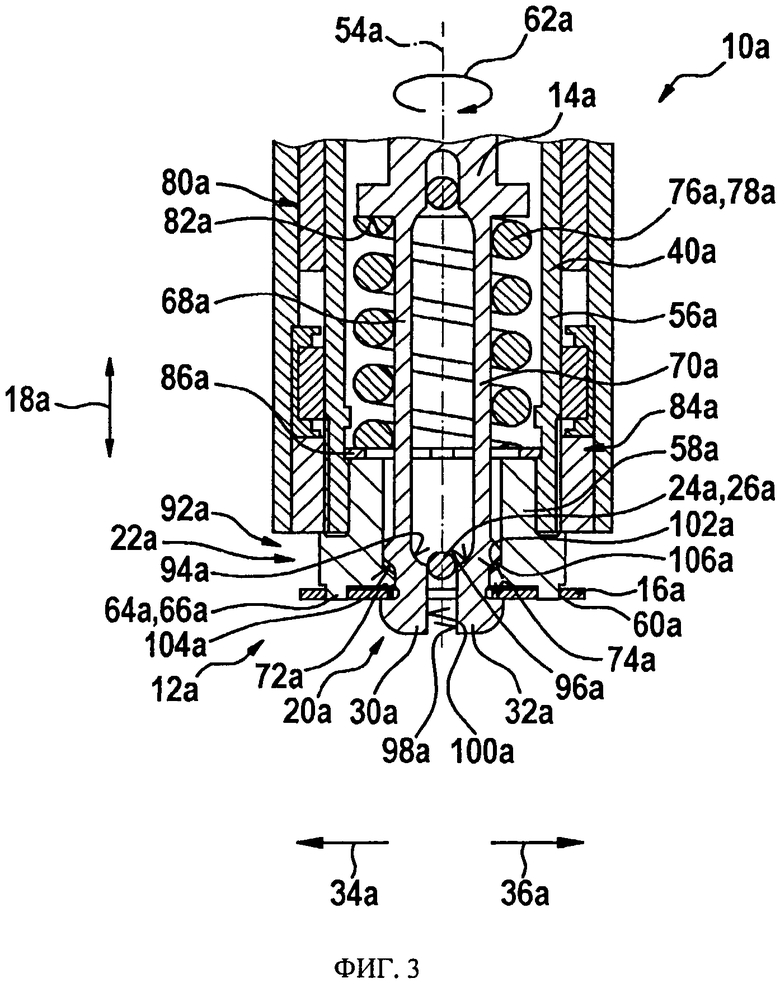
1. Переносная технологическая машина, прежде всего переносная технологическая машина с приводимым в осциллирующее движение шпинделем, содержащая по меньшей мере одно зажимное устройство для закрепления рабочего инструмента, содержащее по меньшей мере один зажимной узел (12а; 12b), имеющий по меньшей мере один стержневидный зажимной элемент (14а; 14b) для зажима рабочего инструмента (16а; 16b) в осевом направлении (18а; 18b) и имеющий по меньшей мере одну расположенную на зажимном элементе (14а; 14b) зажимную головку (20а; 20b), имеющую по меньшей мере два подвижных относительно друг друга участка (30а, 32а; 30b, 32b), при этом зажимное устройство содержит по меньшей мере один узел (22а; 22b) преобразования движения, предусмотренный для того, чтобы в зависимости от движения зажимного элемента (14а; 14b), совершаемого по меньшей мере по существу в осевом направлении (18а; 18b), перемещать по меньшей мере два подвижных относительно друг друга участка (30а, 32а; 30b, 32b) зажимной головки (20а; 20b) по меньшей мере в одном направлении, отличном от осевого направления (18а; 18b), причем узел (22а; 22b) преобразования движения выполнен в виде разводного узла (92а; 92b), предусмотренного для того, чтобы по меньшей мере в одном режиме работы зажимного узла (12а; 12b) перемещать по меньшей мере два подвижных относительно друг друга участка (30а, 32а; 30b, 32b) зажимной головки (20а; 20b) относительно друг друга в противоположных направлениях (34а, 36а; 34b, 36b), отличающаяся тем, что участки (30а, 32а; 30b, 32b) зажимной головки (20а; 20b) имеют поверхности (72а, 74а) зажима, которые при зажатии рабочего инструмента (16а; 16b) в осевом направлении зажимным узлом (12а; 12b) разведены так, что они прилегают по меньшей мере к участку поверхности рабочего инструмента (16а; 16b), и на рабочий инструмент (16а; 16b) действует в осевом направлении (18а; 18b) зажимное усилие.
2. Технологическая машина по п.1, отличающаяся тем, что узел (22а; 22b) преобразования движения имеет по меньшей мере один преобразующий движение элемент (24а; 24b), предусмотренный для того, чтобы по меньшей мере в режиме закрепления рабочего инструмента зажимным узлом (12а; 12b) перемещать зажимную головку (20а; 20b) по меньшей мере в одном направлении, отличном от осевого направления (18а; 18b), для достижения осевого перекрытия зажимной головки (20а; 20b) и рабочего инструмента (16а; 16b).
3. Технологическая машина по п.2, отличающаяся тем, что преобразующий движение элемент (24а; 24b) выполнен в виде пальца (26а; 26b).
4. Технологическая машина по п.1, отличающаяся тем, что зажимная головка (20а) расположена на зажимном элементе (14а) пружинящим образом.
5. Технологическая машина по п.2, отличающаяся тем, что узел (22b) преобразования движения включает в себя по меньшей мере один кулачковый профиль (28b), в который по меньшей мере частично входит преобразующий движение элемент (24b).
6. Технологическая машина по п.5, отличающаяся тем, что кулачковый профиль (28b) расположен на зажимном элементе (14b).
7. Технологическая машина по одному из пп.1-6, отличающаяся тем, что зажимная головка (20а; 20b) выполнена за одно целое с зажимным элементом (14а; 14b).
| Дезинтегратор | 1978 |
|
SU776634A1 |

