ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка является международной заявкой на патент по договору о международной патентной кооперации (РСТ), претендующей на приоритет относительно заявки на патент США №61/442961, поданной 15 февраля 2011 года, заявки на патент США №61/545345, поданной 10 октября 2011 года, и заявки на патент США №61/567577, поданной 6 декабря 2011 года, описания которых полностью включаются в настоящую заявку.
УРОВЕНЬ ТЕХНИКИ ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройствам для артроскопической резекции и, в частности, к устройствам для артроскопической резекции с регулируемым внешним элементом.
ИЗВЕСТНЫЙ УРОВЕНЬ ТЕХНИКИ
Устройства для артроскопической резекции имеют высокие скорости вращения вокруг своих осей. Чтобы окружающая операционное поле ткань не подвергалась случайной резекции, в некоторых из этих устройств имеется внешний элемент, частично закрывающий их рабочую часть. Недостатком является то, что такой внешний элемент иногда может загораживать хирургу линию видимости, что потенциально может приводить к изменению представления хирурга о количестве удаляемой ткани. В настоящее время варианты решения данной проблемы включают использование внешнего элемента меньшей длины, использование во время проведения хирургической процедуры нескольких устройств или использование устройства, которое может использоваться с взаимозаменяемыми внешними элементами различной длины. К их недостаткам относится ограничение возможности выполнения резекции из-за опасения случайного иссечения окружающей ткани, увеличение расходов из-за необходимости в каждом случае открывать для использования несколько устройств резекции, а также потенциальная возможность повреждения режущей поверхности рабочей части при замене внешних элементов.
Поэтому существует потребность в устройстве для выполнения резекции, позволяющем легче и с меньшими расходами изменять положение внешнего элемента относительно внутреннего элемента в ходе хирургической операции.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном аспекте настоящее изобретение имеет отношение к устройствам для артроскопической резекции. Заявляемое устройство содержит: внешний элемент, включающий втулку; внутренний элемент, включающий втулку, причем внутренний элемент располагается внутри внешнего элемента; трубку, соединенную с внешним элементом; механизм, обеспечивающий возможность продольного перемещения внешнего элемента относительно внутреннего элемента, причем данный механизм соединен с трубкой.
В одном варианте воплощения настоящего изобретения дистальный (дальний) конец трубки содержит резьбу, а проксимальный (ближний) конец трубки содержит прорезь. В другом варианте воплощения настоящего изобретения ко внешнему элементу присоединен штырь, причем данный штырь располагается внутри прорези. В еще одном варианте воплощения настоящего изобретения проксимальный конец трубки частично располагается внутри втулки внешнего элемента. В дополнительном варианте воплощения настоящего изобретения внутренний элемент содержит фрезу. В еще одном варианте воплощения настоящего изобретения внешний элемент может перемещаться по длине устройства. В одном варианте воплощения настоящего изобретения фреза имеет плоский рабочий торец. В другом варианте воплощения настоящего изобретения внешний элемент содержит фиксирующие элементы.
В другом аспекте настоящее изобретение имеет отношение к способу восстановления тканей. Этот способ включает предоставление устройства для артроскопической резекции, содержащего: внешний элемент, включающий втулку; внутренний элемент, включающий фрезу и втулку, причем внутренний элемент располагается внутри внешнего элемента; трубку, соединенную с внешним элементом; и механизм для обеспечения возможности продольного перемещения соединенного с трубкой внешнего элемента; а также приведение данного механизма в действие для перемещения внешнего элемента относительно внутреннего элемента и выполнения данным устройством работы по восстановлению ткани.
В одном варианте воплощения настоящего изобретения перемещение внешнего элемента относительно внутреннего элемента позволяет закрывать внешним элементом часть фрезы или совсем не закрывать фрезу внешним элементом. В другом варианте воплощения настоящего изобретения дистальный конец трубки содержит резьбу, а проксимальный конец трубки содержит прорезь. В еще одном варианте воплощения настоящего изобретения ко внешнему элементу присоединен штырь, причем данный штырь располагается внутри прорези. В дополнительном варианте воплощения настоящего изобретения проксимальный конец трубки частично располагается внутри втулки внешнего элемента. В еще одном варианте внешний элемент может перемещаться по длине устройства. В одном варианте воплощения настоящего изобретения фреза имеет плоский рабочий торец. В другом варианте воплощения настоящего изобретения ткань является вертлужной впадиной. В другом варианте воплощения настоящего изобретения внешний элемент содержит фиксирующие элементы. В еще одном варианте воплощения настоящего изобретения механизм содержит резьбу, входящую в зацепление с резьбой трубки.
В еще одном варианте воплощения настоящего изобретения механизм содержит рычаг. В другом варианте воплощения настоящего изобретения механизм содержит скользящую ручку. В еще одном варианте воплощения настоящего изобретения механизм содержит храповик.
Дополнительные области применения настоящего изобретения станут очевидными из приведенного здесь ниже подробного описания. Следует понимать, что подробное описание и конкретные примеры, хотя они и представляют собой предпочтительные варианты воплощения настоящего изобретения, служат только для демонстрации и не предназначены ограничивать объем данного изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопроводительные чертежи, которые включены в описание и являются его составной частью, демонстрируют варианты воплощения настоящего изобретения и, вместе с письменным описанием, предназначены для объяснения принципов, характеристик и особенностей данного изобретения. На чертежах:
На Фиг.1 показан вид сбоку устройства для артроскопической резекции в соответствии с настоящим изобретением.
На Фиг.2 показан вид сбоку устройства для артроскопической резекции, согласно Фиг.1, без ручки или фиксирующего механизма.
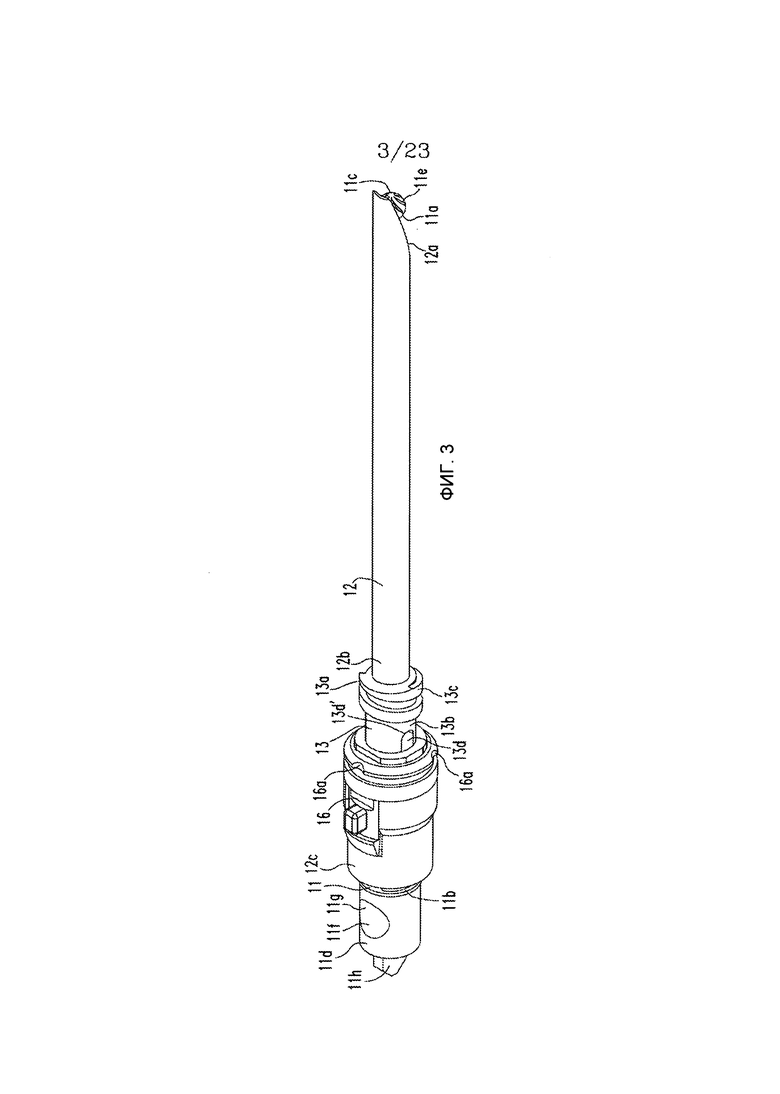
На Фиг.3 показан вид сбоку устройства для артроскопической резекции, согласно Фиг.1, без ручки.
На Фиг.4 показан вид сбоку устройства для артроскопической резекции, согласно Фиг.1, с незакрытой фрезой.
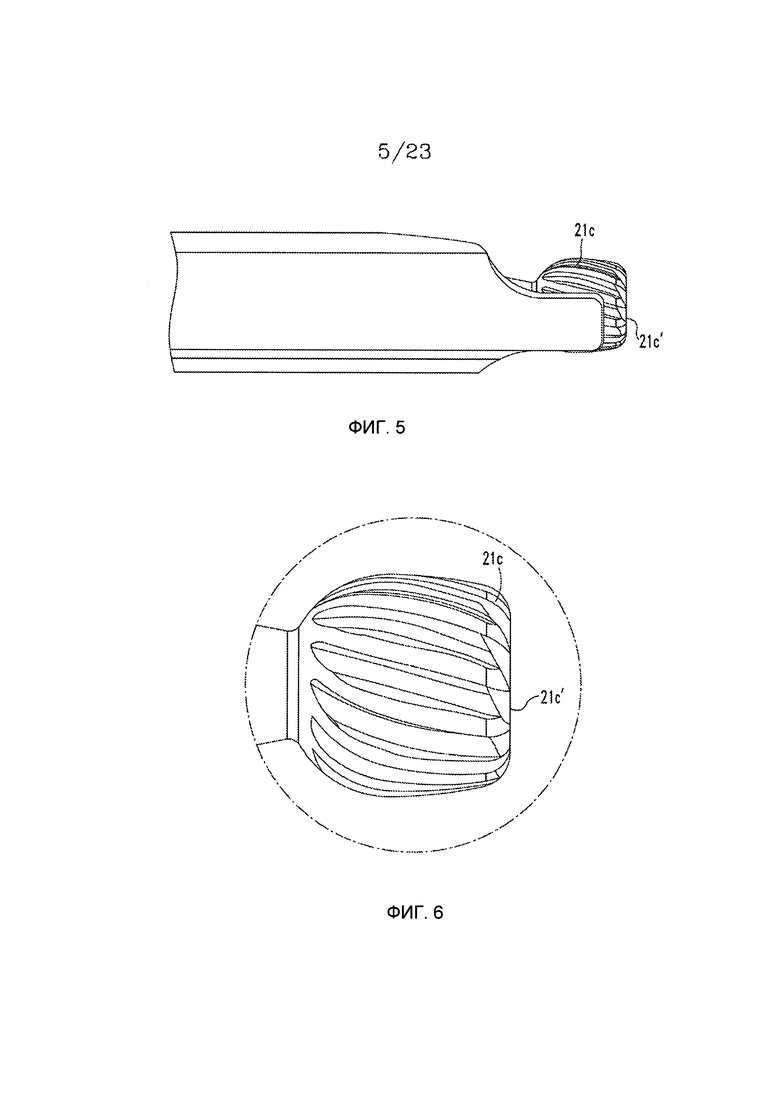
На Фиг.5 показан вид сбоку устройства для артроскопической резекции, согласно Фиг.1, с плоской фрезой.
На Фиг.6 показан увеличенный вид плоской фрезы согласно Фиг.5.
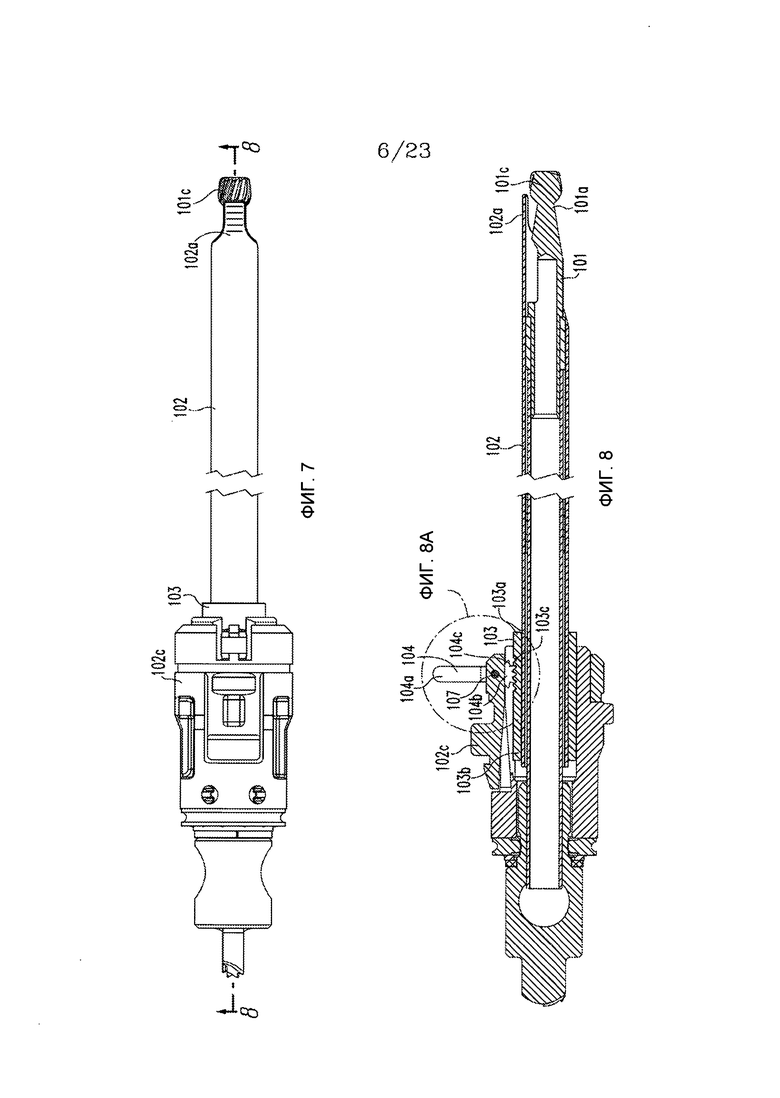
На Фиг.7 показан вид сверху альтернативного варианта воплощения устройства для артроскопической резекции согласно настоящему изобретению с храповиком в нерабочем положении.
На Фиг.8 показан вид сбоку поперечного сечения устройства для артроскопической резекции согласно Фиг.7.
На Фиг.8A приведен увеличенный вид храповика, показанного на Фиг.8.
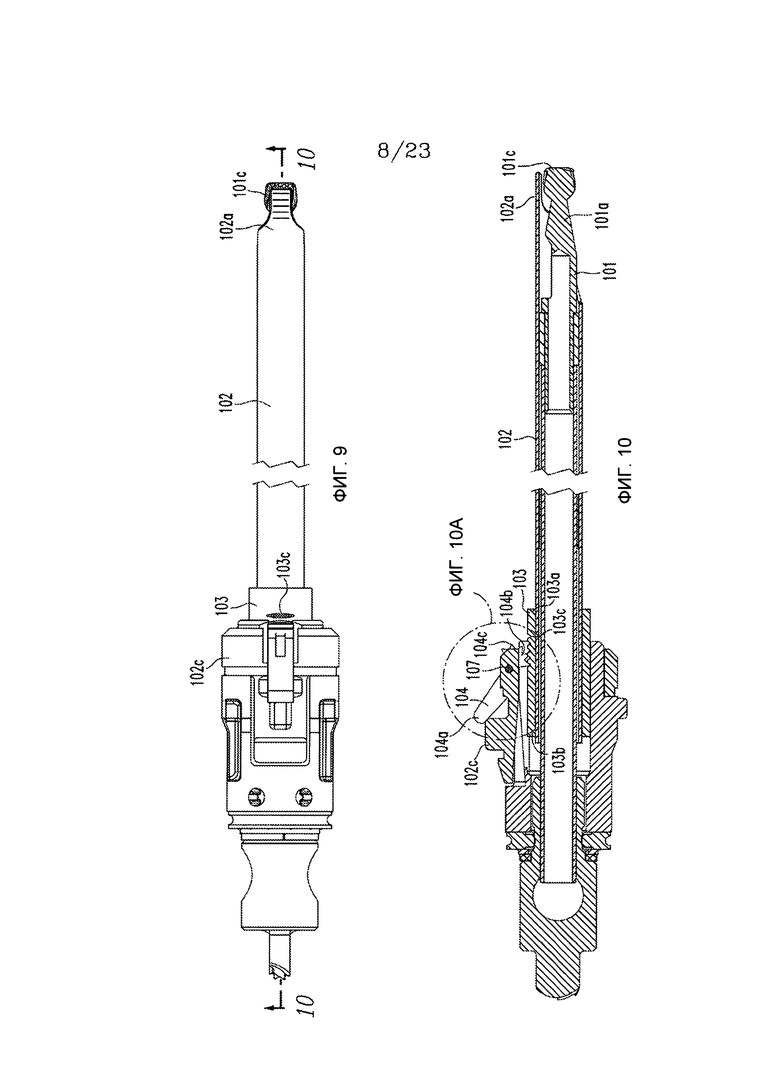
На Фиг.9 показан другой вид сверху альтернативного варианта воплощения заявляемого устройства для артроскопической резекции, согласно Фиг.7, с храповиком в активированном положении.
На Фиг.10 показан вид сбоку поперечного сечения устройства для артроскопической резекции согласно Фиг.9.
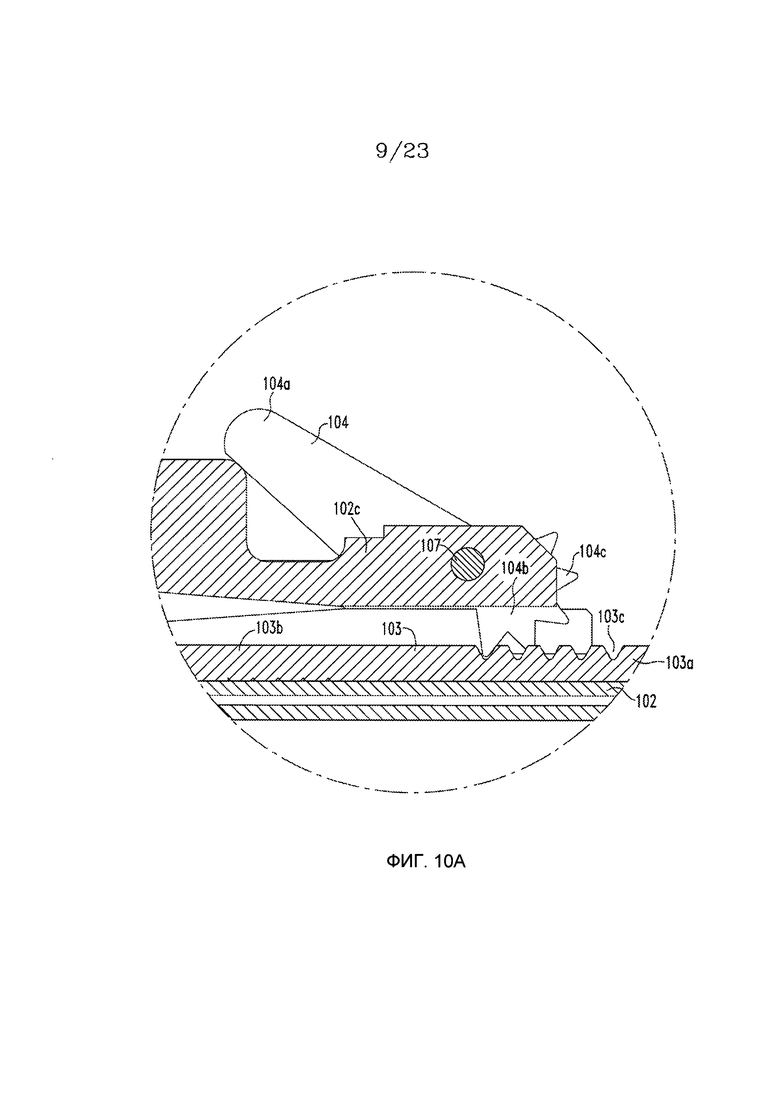
На Фиг.10A показан увеличенный вид храповика, показанного на Фиг.10.
На Фиг.11 показан еще один вид сверху альтернативного варианта воплощения устройства для артроскопической резекции, согласно Фиг.7, с храповиком в активированном положении.
На Фиг.12 показан вид сбоку поперечного сечения устройства для артроскопической резекции согласно Фиг.11.
На Фиг.12A показан увеличенный вид храповика, показанного на Фиг.12.
На Фиг.13 показан вид сверху другого альтернативного варианта воплощения устройства для артроскопической резекции, в соответствии с настоящим изобретением, с рычагом в нерабочем положении.
На Фиг.14 показан вид сбоку поперечного сечения устройства для артроскопической резекции согласно Фиг.13.
На Фиг.14A приведен увеличенный вид храповика, показанного на Фиг.14.
На Фиг.15 показан другой вид сверху альтернативного варианта воплощения заявляемого устройства для артроскопической резекции, согласно Фиг.13, с рычагом в активированном положении.
На Фиг.16 показан вид сбоку поперечного сечения устройства для артроскопической резекции согласно Фиг.15.
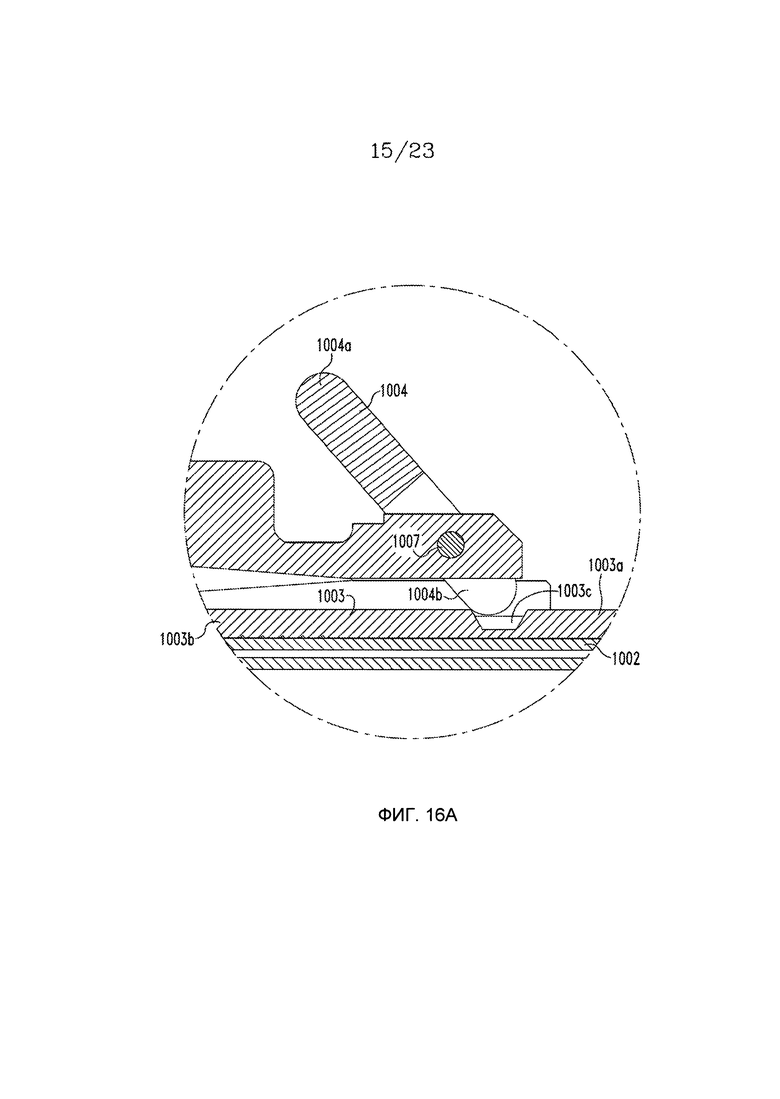
На Фиг.16A показан увеличенный вид рычага, показанного на Фиг.16.
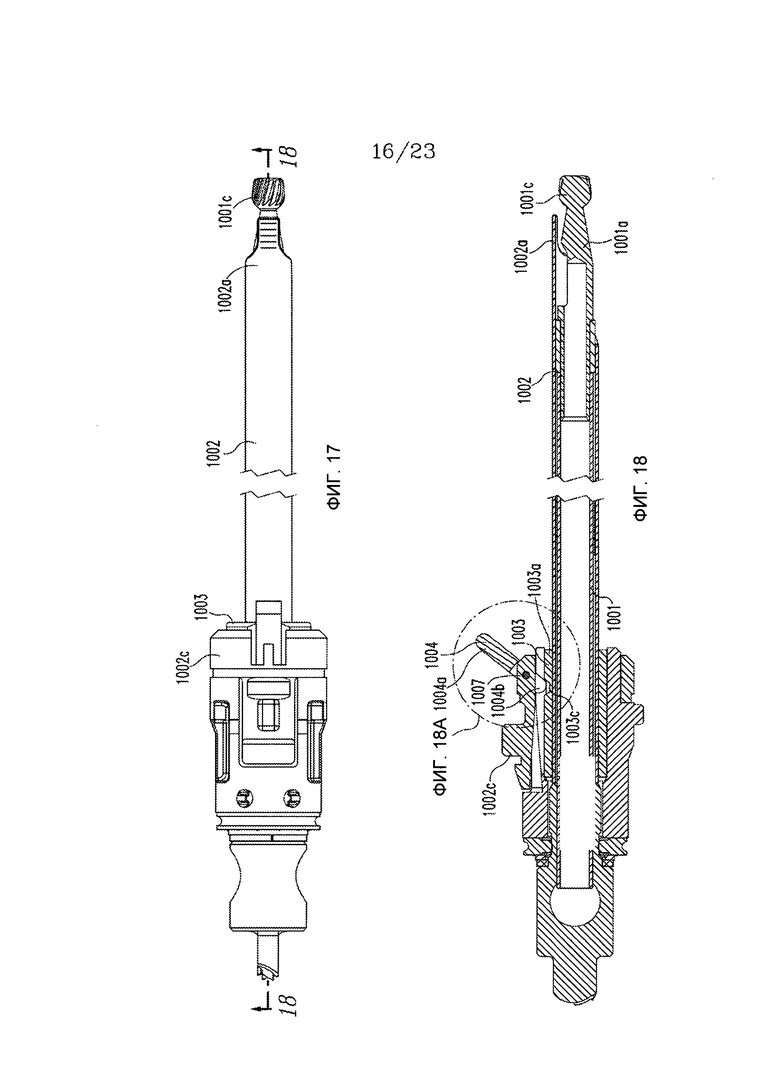
На Фиг.17 показан еще один вид сверху альтернативного варианта воплощения заявляемого устройства для артроскопической резекции, согласно Фиг.13, с храповиком в активированном положении.
На Фиг.18 показан вид сбоку поперечного сечения устройства для артроскопической резекции согласно Фиг.17.
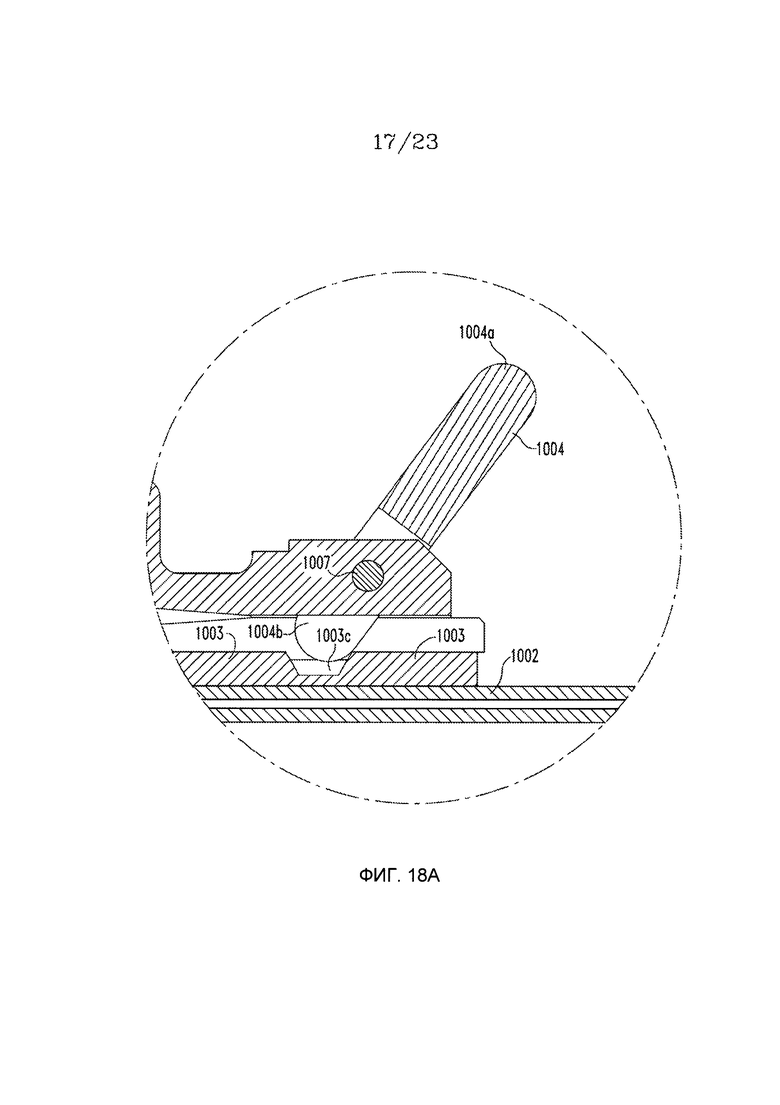
На Фиг.18A показан увеличенный вид храповика, показанного на Фиг.18.
На Фиг.19 показан вид сверху еще одного другого альтернативного варианта воплощения заявляемого устройства для артроскопической резекции в соответствии с настоящим изобретением со скользящей ручкой в нерабочем положении.
На Фиг.20 показан вид сбоку поперечного сечения устройства для артроскопической резекции согласно Фиг.19.
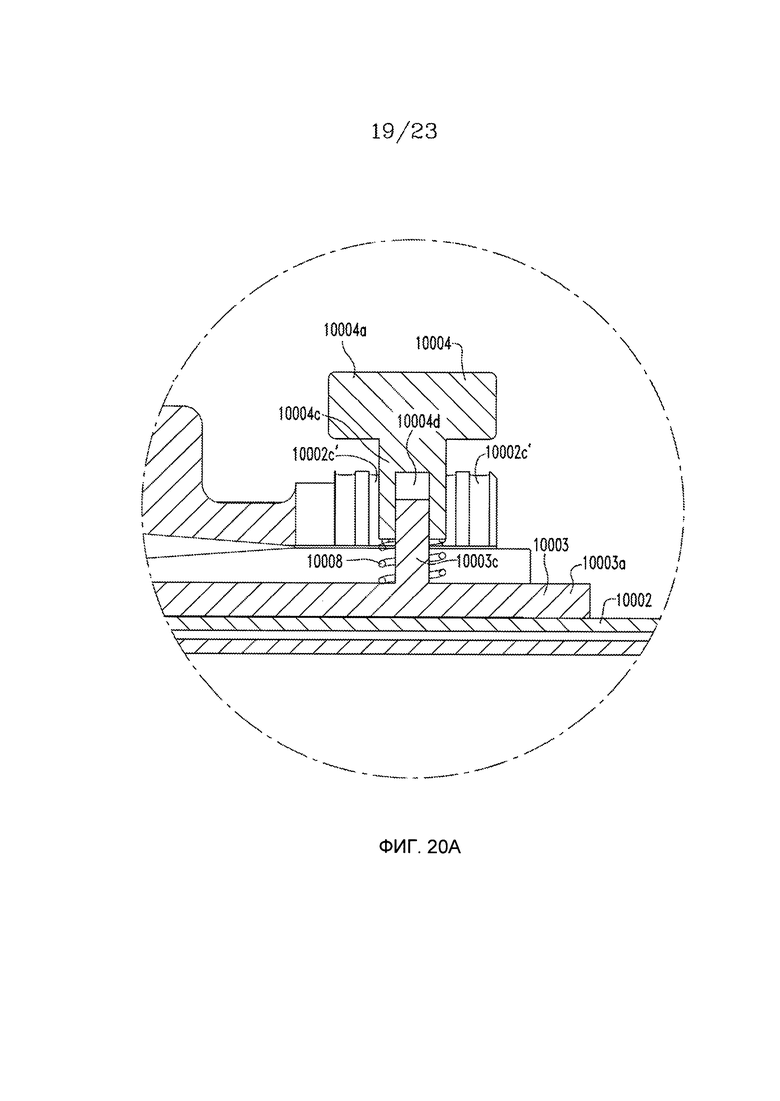
На Фиг.20A приведен увеличенный вид храповика, показанного Фиг.20.
На Фиг.21 показан другой вид сверху альтернативного варианта воплощения заявляемого устройства для артроскопической резекции, согласно Фиг.19, со скользящей ручкой в активированном положении.
На Фиг.22 показан вид сбоку поперечного сечения устройства для артроскопической резекции согласно Фиг.21.
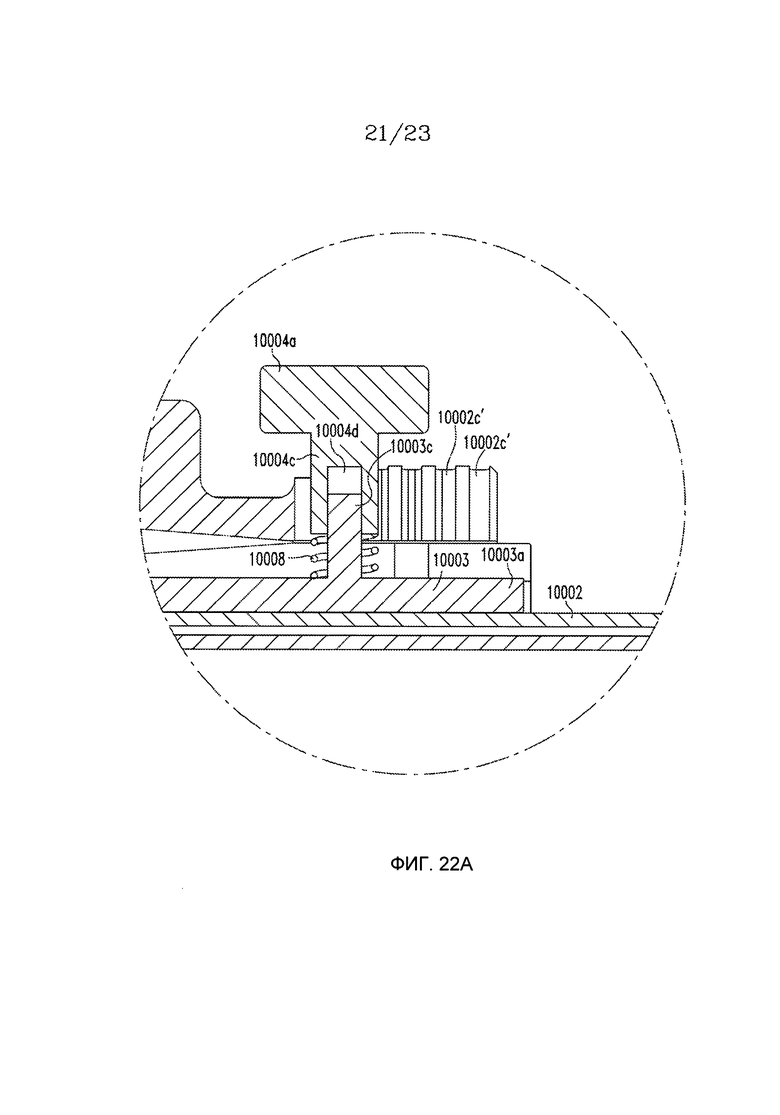
На Фиг.22A показан увеличенный вид скользящей ручки, показанной на Фиг.22.
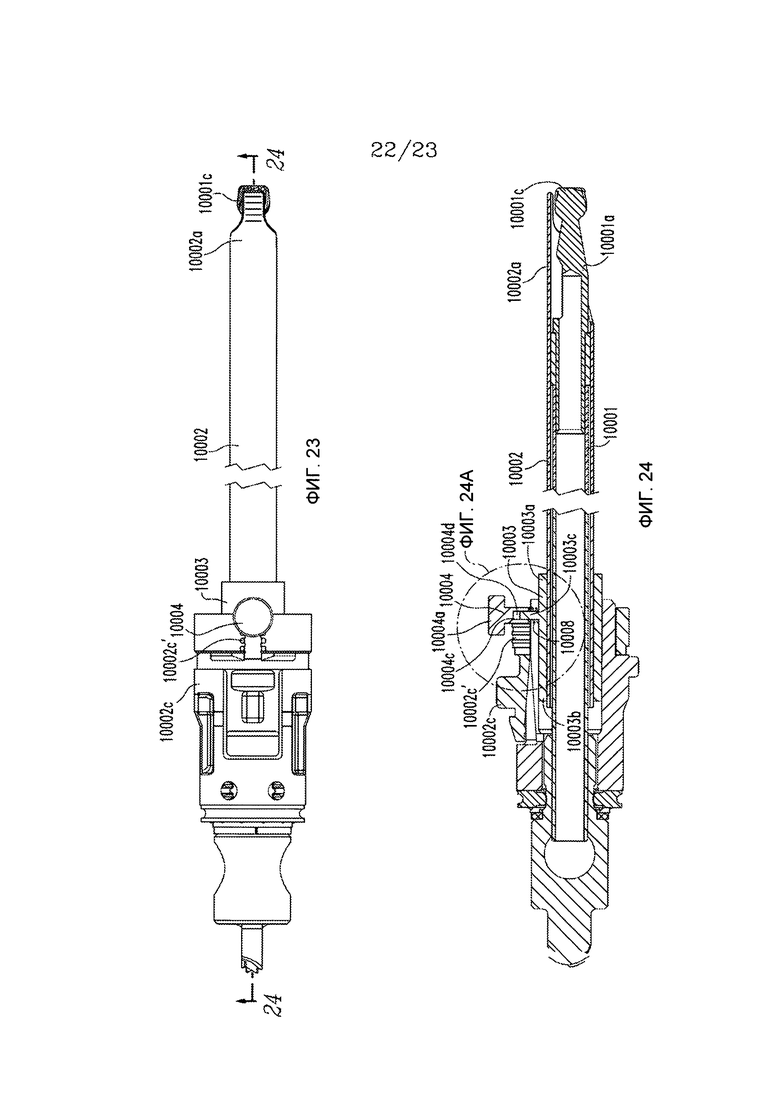
На Фиг.23 показан еще один вид сверху альтернативного варианта воплощения заявляемого устройства для артроскопической резекции, согласно Фиг.19, с храповиком в активированном положении.
На Фиг.24 показан вид сбоку поперечного сечения устройства для артроскопической резекции согласно Фиг.23.
На Фиг.24A показан увеличенный вид скользящей ручки, показанной на Фиг.24.
На Фиг.25 показан вид спереди поперечного сечения скользящей ручки устройства для артроскопической резекции согласно Фиг.19.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
Последующее описание предпочтительного варианта (вариантов) воплощения настоящего изобретения носит только иллюстративный характер и никаким образом не предназначено для ограничения данного изобретения, его применения или использования.
На Фиг. 1-4 показано устройство для артроскопической резекции 10 в соответствии с настоящим изобретением и его компоненты. Устройство 10 содержит внутренний элемент 11, внешний элемент 12, трубку 13, а также механизм 14 для обеспечения продольного перемещения внешнего элемента 12 относительно внутреннего элемента 11. Для целей на Фиг. 1-4 таким механизмом служит ручка. Внутренний элемент 11 выполнен в форме трубки и содержит дистальный конец 11а и проксимальный конец 11b. С дистальным концом 11а соединена фреза 11с, а с проксимальным концом 11b соединена втулка 11d. Фреза 11с содержит канавки 11е, использующиеся для разрезания ткани. Дистальный конец 11а также содержит отверстие (не показано), через которое проходит отрезаемая ткань во время хирургической операции, как будет дополнительно описано ниже. Втулка 11d проксимального конца 11b содержит сквозное отверстие 11f с двумя выемками 11g и приводной лапкой 11h, которая во время использования соединена с приводным валом блока приводного мотора. Блок приводного мотора также содержит источник вакуума, перемещающий отрезанную ткань через внутренний элемент 11, отверстие 11f и выемки 11g, а затем наружу из устройства 10. Внутренний элемент 11, его компоненты, а также способ его использования с блоком приводного мотора во время хирургической операции дополнительно описан в Патенте США №5871493, описание которого включено в настоящее изобретение в полном объеме путем ссылки.
Внешний элемент 12 имеет открытый дистальный конец 12а и проксимальный конец 12b. С проксимальным концом 12b соединена втулка 12с. Втулка 12с содержит отверстие 12d с каждой стороны втулки 12с. Как показанона Фиг. 2, внутри отверстий 12d располагается штырь 15 и внешний элемент 12. Втулка 12с содержит фиксирующий механизм 16, соединенный с втулкой 12с. Как показано на Фиг. 1-4, внутренний элемент 11
располагается внутри внешнего элемента 12. Фиксирующий механизм 16 соединяет втулку 12с, а значит и устройство 10, с блоком приводного мотора, когда устройство 10 помещается в блоке приводного мотора. Фиксирующий механизм 16 и способ его использования с блоком приводного мотора дополнительно описаны в патенте США №5871493.
Трубка 13 содержит дистальный конец 13а и проксимальный конец 13b. Дистальный конец 13а содержит резьбу 13с, а проксимальный конец 13b содержит прорезь 13d с каждой стороны трубки 13. Трубка 13 располагается над внешним элементом 12, и по меньшей мере часть проксимального конца 13b располагается внутри втулки 12с, так, что по меньшей мере части штыря 15 располагаются внутри прорезей 13d.
Ручка 14 содержит пальцы 14а и внутреннюю резьбу (не показана). Ручка 14 располагается на внешнем элементе 12 так, что пальцы 14а соединены с фиксирующим механизмом 16, а внутренняя резьба входит в зацепление с резьбой 13с трубки 13. За счет зацепления внутренней резьбы с резьбой 13с, а также соединения трубки 13 с внешним элементом 12, вращение ручки 14 позволяет перемещать трубку 13 вдоль продольной оси устройства 10, а значит и внешнего элемента 12, проксимально по направлению к ручке 14. Перемещение внешнего элемента 12 продолжается до тех пор, пока части 13d' прорезей 13d не соприкоснутся со штырем 15.
На Фиг. 1 показано расположение дистального конца 12а внешнего элемента 12 до начала осевого перемещения внешнего элемента 12 проксимально по направлениюк ручке 14. Как показано на Фиг. 1, по меньшей мере часть фрезы 11с закрывается внешним элементом 12. На Фиг. 4 показано положение дистального конца 12а внешнего элемента 12 после полного проксимального осевого перемещения внешнего элемента 12. Полное проксимальное осевое перемещение внешнего элемента 12 происходит тогда, когда части 13d' прорезей 13d соприкасаются со штырем 15 и не может продолжаться дальнейшее осевое перемещения трубки 13, а
происходит тогда, когда части 13d′ прорезей 13d соприкасаются со штырем 15 и не может продолжаться дальнейшее осевое перемещения трубки 13, а значит и осевое перемещение внешнего элемента 12, проксимально по направлению к ручке 14. Как показано на Фиг.4, фреза 11с совсем не закрыта внешним элементом 12 после полного осевого перемещения внешнего элемента 12. Вращение ручки 14 в противоположном направлении приводит к тому, что трубка 13 и внешний элемент 12 перемещаются дистально назад по направлению к фрезе 11c до тех пор, пока дистальный конец 12a внешнего элемента 12 не возвратится в требующееся хирургу положение, такое как положение внешнего элемента 12, показанное на Фиг.1.
Фиксирующий механизм 16 содержит фиксирующие элементы 16a. По меньшей мере один из пальцев 14a содержит ушко (не показано), которое входит в фиксирующие элементы 16a. Фиксирующие элементы 16a могут использоваться для определения дискретных положений или размещения внешнего элемента 12. Например, отсутствие проксимального осевого перемещения внешнего элемента 12, частичное проксимальное осевое перемещение внешнего элемента 12 и полное проксимальное осевое перемещение внешнего элемента 12.
До начала процедуры восстановления тканей такой пользователь, как хирург, может установить в требуемое положение дистальный конец 12a внешнего элемента 12. Затем хирург устанавливает устройство 10 в пределах операционной области и использует устройство 10 для восстановления ткани. Во время выполнения данной процедуры хирург может по своему усмотрению изменять положение дистального конца 12a внешнего элемента 12. Например, хирург может направить дистальный конец 12a внешнего элемента 12 вокруг дистального конца 11a внутреннего элемента 11 и фрезы 11c в случае необходимости защиты ткани, окружающей операционную область. Если защита окружающей ткани больше не требуется, хирург может отвести внешний элемент 12 в осевом направлении с целью отвода дистального конца 12a внешнего элемента 12 от фрезы 11c. Во время хирургической процедуры больше не потребуется использование нескольких устройств или устройства, допускающего применение со взаимозаменяемыми внешними элементами разной длины, как описано выше.
Ни Фиг.5 и 6 показана фреза 21c с плоским рабочим торцом 21c′. В отличие от фрезы 11c, показанной на Фиг.1-4, фреза 21c имеет плоский рабочий торец, тогда как фреза 11c имеет закругленный рабочий торец. Фреза 21c пригодна для выполнения таких хирургических процедур, как ацетабулопластика, также известных как процедуры краевого иссечения, в которых на краю вертлужной впадины создается плоская поверхность за один проход фрезы 21c, а не за несколько проходов фрезы с закругленным рабочим торцом, такой как фреза 11c. Фреза 11c оставляет "борозду", края которой подлежат удалению в перпендикулярной плоскости. Использование фрезы 21c позволяет избежать возникновения таких борозд и, следовательно, выполнения дополнительной процедуры удаления краев.
Вместо использования трубки и ручки для продольного перемещения внешнего элемента можно использовать другие элементы. На Фиг.7-12А показано использование храповика 104 с трубкой 103. Подобно трубке 13, трубка 103 содержит дистальный конец 103a и проксимальный конец 103b. Дистальный конец 103a содержит зубья 103c, идущие по меньшей мере вдоль части дистального конца 103a. Храповик 104, соединенный со втулкой 102c посредством штыря 107, содержит проксимальный конец 104a и дистальный конец 104b. Дистальный конец 104b содержит зубчатые колеса 104c, входящие в зацепление с зубьями 103c. Когда храповик 104 находится в нерабочем положении, таком как показано на Фиг.8, дистальный конец 102a внешнего элемента 102 находится в показанном на Фиг.7 и 8 положении по отношению к дистальному концу 101a внутреннего элемента 101 и фрезе 101c. Показанная на Фиг.10 и 12 активация храповика 104 приводит к перемещению внешнего элемента 102 по оси так, что дистальный конец 102a внешнего элемента 102 будет находиться в показанном на Фиг.9 и 11 положении по отношению к дистальному концу 101a внутреннего элемента 101 и фрезе 101c.
Полное дистальное осевое перемещение внешнего элемента 102, при котором становится невозможным дальнейшее дистальное перемещение внешнего элемента 102 в направлении фрезы 101c, показано на Фиг.9 и 10, а полное проксимальное перемещение внешнего элемента 102, при котором становится невозможным дальнейшее проксимальное перемещение внешнего элемента 102 в направлении втулки 101d, показано на Фиг.11 и 12. В пределах объема настоящего изобретения предусмотрено, что храповик 104 может активироваться для дистального перемещения внешнего элемента 102 с целью позиционирования дистального конца 102а внешнего элемента 102 по отношению к фрезе 101c между тем положением, где располагается дистальный конец 102a на Фиг.11 и 12, и тем положением, где располагается дистальный конец на Фиг.9 и 10. Аналогичным образом в пределах объема настоящего изобретения предусмотрено, что храповик 104 может активироваться для проксимального перемещения внешнего элемента 102 с целью позиционирования дистального конца 102a внешнего элемента 102 по отношению к фрезе 101c между тем положением, где располагается дистальный конец 102a на Фиг.9 и 10, и тем положением, где располагается дистальный конец 102a на Фиг.11 и 12.
На Фиг.13-18A показано использование рычага 1004 с трубкой 1003. Подобно трубке 103, трубка 1003 содержит дистальный конец 1003a и проксимальный конец 1003b. Дистальный конец 1003a содержит паз 1003c. Рычаг 1004, соединенный со втулкой 1002c посредством штыря 1007, содержит проксимальный конец 1004a и дистальный конец 1004b. Дистальный конец 1004b заходит в паз 1003c. Когда рычаг 1004 находится в показанном на Фиг.14 нерабочем положении, дистальный конец 1002a внешнего элемента 1002 будет находиться в показанном на Фиг.13 и 14 положении по отношению к дистальному концу 1001a внутреннего элемента 1001 и фрезы 1001c. Показанная на Фиг.16 и 18 активация рычага 1004 приводит к осевому перемещению внешнего элемента 1002 таким образом, что дистальный конец 1002a внешнего элемента 1002 находится в показанном на Фиг.15 и 17 положении по отношению к дистальному концу 1001a внутреннего элемента 1001 и фрезы 1001c.
Полное дистальное осевое перемещение внешнего элемента 1002, при котором становится невозможным дальнейшее дистальное перемещение внешнего элемента 1002 в направлении фрезы 1001c, показано на Фиг.15 и 16, а полное проксимальное перемещение внешнего элемента 1002, при котором становится невозможным дальнейшее проксимальное перемещение внешнего элемента 1002 в направлении втулки 1001d, показано на Фиг.11 и 12. В пределах объема настоящего изобретения предусмотрено, что рычаг 1004 может активироваться для дистального перемещения внешнего элемента 1002 с целью позиционирования дистального конца 1002a внешнего элемента 1002 по отношению к фрезе 1001c между тем положением, где располагается дистальный конец на Фиг.17 и 18, и тем положением, где располагается дистальный конец на Фиг.15 и 16. Аналогичным образом в пределах объема настоящего изобретения предусмотрено, что рычаг 1004 может активироваться для проксимального перемещения внешнего элемента 1002 с целью позиционирования дистального конца 1002a внешнего элемента 1002 по отношению к фрезе 1001c между тем положением, где располагается дистальный конец 1002a на Фиг.15 и 16, и тем положением, где располагается дистальный конец 1002a на Фиг.17 и 18.
Вместо расположения на внешнем элементе 1002 рычаг 1004 может располагаться на наконечнике, к которому присоединяется внешний элемент 1002, и обеспечивать прямое или непрямое перемещение внешнего элемента 1002.
На Фиг.19-25 показано использование скользящей ручки 10004 с трубкой 10003. Подобно трубкам 103 и 1003, трубка 10003 содержит дистальный конец 10003a и проксимальный конец 10003b. Дистальный конец 10003a содержит ушко 10003c, которое располагается внутри отверстия 10004d в ручке 10004. Вокруг ушка 10003c и между ручкой 10004 и трубкой 10003 находится пружина 10008. Как показано на Фиг.25, ручка 10004 содержит верхнюю часть 10004а, нижнюю часть 10004b и среднюю часть 10004c. Диаметр верхней части и нижней части 10004a, 10004b больше диаметра средней части 10004c. Когда скользящая ручка 10004 находится в нерабочем положении, показанном на Фиг.20, дистальный конец 10002a внешнего элемента 10002 находится в показанном на Фиг.19 и 20 положении по отношению к дистальному концу 10001a внутреннего элемента 10001 и фрезе 10001c. В нерабочем положении стороны 10004b′ нижней части 10004b находятся в одном из пазов 10002с′ втулки внешнего элемента 10002c. С целью активации ручки 10004 следует надавить на ее верхнюю часть 10004a для выполнения нажатия на ручку 10004, что приведет к сжатию пружины 10008. Затем ручка 10004 перемещается по оси вдоль втулки 10002c, вызывая осевое перемещение внешнего элемента 10002. Как только дистальный конец 10002a внешнего элемента 10002 будет находиться в нужном пользователю положении, а нижняя часть 10004b совпадет с одним из пазов 10002c′, пользователь прекращает надавливать на ручку 10004, и распрямление пружины 10008 приводит к перемещению ручки 10004 вверх и позиционированию сторон нижней части 10004b′ в пазу 10002c′. Расположение нижней части 10004b′ внутри пазов 10002c′ существенно снижает возможность случайного осевого перемещения пользователем внешнего элемента 10002.
Ручка 10004 показана на Фиг.19-20 и 20A в ее нерабочем положении. В этом положении дистальный конец 10002a внешнего элемента 10002a располагается по отношению к фрезе 10001c так, как показано. Полное дистальное осевое перемещение внешнего элемента 10002, при котором становится невозможным дальнейшее дистальное перемещение внешнего элемента 10002 в направлении фрезы 10001c, показано на Фиг.23 и 24, при этом полное проксимальное перемещение внешнего элемента 10002, при котором становится невозможным дальнейшее проксимальное перемещение внешнего элемента 10002 в направлении втулки 10001d, показано на Фиг.21 и 22. В пределах объема настоящего изобретения предусмотрено, что ручка 10004 может активироваться для дистального перемещения внешнего элемента 10002 с целью позиционирования дистального конца 10002a внешнего элемента 10002 по отношению к фрезе 10001c между тем положением, где располагается дистальный конец 10002a на Фиг.23 и 24, и тем положением, где располагается дистальный конец 10002a на Фиг.21 и 22. Аналогичным образом в пределах объема настоящего изобретения предусмотрено, что ручка 10004 может активироваться для проксимального перемещения внешнего элемента 10002 с целью позиционирования дистального конца 10002a внешнего элемента 10002 по отношению к фрезе 10001с между тем положением, где располагается дистальный конец 10002a на Фиг.21 и 22, и тем положением, где располагается дистальный конец 10002a на Фиг.23 и 24.
В качестве альтернативы скользящая ручка, такая как скользящая ручка 10004, может располагаться на наконечнике для обеспечения продольного перемещения внешнего элемента 10002. Также возможно наличие резьбы на внешней поверхности внешнего элемента 12, входящей в зацепление с резьбой на наконечнике. Резьбовое соединение между наконечником и внешним элементом 12 обеспечивает продольное перемещение внешнего элемента 12 путем вращения внешнего элемента 12. Наконец, вместо продольного перемещения внешнего элемента 12, 102, 1002, 10002 относительно внутреннего элемента 11, 101, 1001, 10001 возможна фиксация положения внешнего элемента 12, 102, 1002, 10002 при продольном перемещении внутреннего элемента 11, 101, 1001, 10001 относительно внешнего элемента 12, 102, 1002, 10002. Это можно выполнить посредством соединения между наконечником и внутренним элементом 11, 101, 1001, 10001 так, как описано выше, или другим способом, известным специалистам в данной области техники.
Поскольку в приведенные в качестве примера варианты воплощения настоящего изобретения могут быть внесены, без отклонения от объема настоящего изобретения, различные изменения, как описано выше со ссылкой на соответствующие примеры, предполагается, что весь материал, содержащийся в предыдущем описании и показанный на прилагаемых чертежах, следует толковать только как иллюстративный, а не ограничивающий. Таким образом, охват и объем настоящего изобретения не ограничивается описанными выше в качестве примера вариантами воплощения настоящего изобретения, а определяется только прилагаемой к данному документу формулой изобретения и ее эквивалентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕДИЦИНСКИЙ ПРИБОР С ЭЛЕМЕНТАМИ ЗАХВАТА ДЛЯ ПРЕДОТВРАЩЕНИЯ ПОВТОРНОГО ИСПОЛЬЗОВАНИЯ | 2012 |
|
RU2606596C2 |
| ИНСТРУМЕНТ ДЛЯ АРТРОСКОПИЧЕСКОЙ РЕЗЕКЦИИ | 2011 |
|
RU2556973C2 |
| ИГОЛЬНОЕ УСТРОЙСТВО | 2003 |
|
RU2335303C2 |
| СИСТЕМА, ИСПОЛЬЗУЕМАЯ ПРИ ВОССТАНОВЛЕНИИ ТКАНЕЙ | 2011 |
|
RU2616994C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СКОРОСТЬЮ ПОДАЧИ ДОЗЫ И ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2014 |
|
RU2652871C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ НАЛОЖЕНИЯ СКОБОК, СОДЕРЖАЩИЙ МНОГОХОДОВЫЙ ПРИВОДНОЙ МЕХАНИЗМ ЗАПУСКА С ПОВОРОТНОЙ РУЧНОЙ ОТВОДЯЩЕЙ СИСТЕМОЙ С ВОЗВРАТНОЙ ПРУЖИНОЙ | 2006 |
|
RU2420240C2 |
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО | 2014 |
|
RU2671419C2 |
| ИНСТРУМЕНТ ДЛЯ СИЛОВОЙ ОПРЕССОВКИ КАБЕЛЬНЫХ СОЕДИНИТЕЛЕЙ (ВАРИАНТЫ) | 2008 |
|
RU2491689C2 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ЭЛЕМЕНТАМИ УПРАВЛЕНИЯ, ПРИГОДНЫМИ ДЛЯ РАБОТЫ ОДНОЙ РУКОЙ | 2009 |
|
RU2489099C2 |
| Устройство ввода катетера, включающее установленные сверху элементы выдвижения | 2016 |
|
RU2715308C2 |












Изобретение относится к медицине и может быть использовано для артроскопической резекции. Устройство содержит внешний и внутренний элементы, каждый из которых включает втулку. Внутренний элемент располагается внутри внешнего элемента. Трубка соединена с внешним элементом и с механизмом, обеспечивающим возможность продольного перемещения внешнего элемента относительно внутреннего элемента. Механизм перемещения внешнего элемента относительно внутреннего элемента включает рукоятку с резьбой, храповик или рычаг. 2 н. и 21 з.п. ф-лы, 25 ил.
1. Устройство для артроскопической резекции, содержащее:
канюлированный раздвигаемый внешний элемент, содержащий проксимальный компонент и дистальный компонент, который выполнен с возможностью перемещения относительно проксимального компонента для удлинения и укорачивания канюлированного раздвигаемого внешнего элемента;
внутренний элемент, выполненный с возможностью соединения с возможностью вращения с проксимальным компонентом канюлированного раздвигаемого внешнего элемента и выполненный с таким размером, чтобы проходить по меньшей мере частично через канюляцию канюлированного раздвигаемого внешнего элемента; и
приводной механизм, который соединен с возможностью перемещения с проксимальным компонентом и соединен с возможностью перемещения с дистальным компонентом канюлированного раздвигаемого внешнего элемента так, что перемещение приводного механизма относительно проксимального компонента осуществляет удлинение или укорачивание канюлированного раздвигаемого внешнего элемента посредством перемещения дистального компонента относительно проксимального компонента.
2. Устройство для артроскопической резекции по п. 1, отличающееся тем, что дистальный компонент канюлированного раздвигаемого внешнего элемента представляет собой трубку.
3. Устройство для артроскопической резекции по п. 1, отличающееся тем, что проксимальный компонент канюлированного раздвигаемого внешнего элемента представляет собой втулку внешнего элемента.
4. Устройство для артроскопической резекции по п. 1, отличающееся тем, что проксимальный компонент канюлированного раздвигаемого внешнего элемента представляет собой втулку внешнего элемента с канюляцией, а дистальный компонент канюлированного раздвигаемого внешнего элемента представляет собой трубку, при этом трубка выполнена с такими размерами и таким образом, чтобы скользить в продольном направлении в канюляции втулки внешнего элемента.
5. Устройство для артроскопической резекции по п. 1, отличающееся тем, что внутренний элемент включает втулку внутреннего элемента, расположенную проксимально относительно канюлированного раздвигаемого внешнего элемента, вал, соединенный со втулкой внутреннего элемента так, что он помещен в канюляцию канюлированного раздвигаемого внешнего элемента, и фрезу, соединенную с валом.
6. Устройство для артроскопической резекции по п. 1, отличающееся тем, что внутренний элемент включает фрезу на своем дистальном конце, которая представляет собой одно из: шарообразная фреза, фреза с плоским рабочим торцом, фреза с винтовыми зубьями и сверло.
7. Устройство для артроскопической резекции по п. 1, отличающееся тем, что когда канюлированный раздвигаемый внешний элемент находится
в удлиненном состоянии, фреза на дистальном конце внутреннего элемента не выступает за пределы дальнего дистального конца канюлированного раздвигаемого внешнего элемента.
8. Устройство для артроскопической резекции по п. 1, отличающееся тем, что когда канюлированный раздвигаемый внешний элемент находится в укороченном состоянии, фреза на дистальном конце внутреннего элемента по меньшей мере частично выступает за пределы дальнего дистального конца канюлированного раздвигаемого внешнего элемента.
9. Устройство для артроскопической резекции по п. 1, отличающееся тем, что приводной механизм включает ручку, которая соединена с возможностью вращения с проксимальным компонентом, при этом ручка включает резьбу, и при этом дистальный компонент содержит резьбу, которая взаимодействует с резьбой ручки так, что вращение ручки относительно проксимального компонента удлиняет канюлированный раздвигаемый внешний элемент, когда ручка поворачивается в первом направлении, и укорачивает канюлированный раздвигаемый внешний элемент, когда ручка поворачивается во втором направлении, противоположном первому направлению.
10. Устройство для артроскопической резекции по п. 9, отличающееся тем, что приводной механизм включает фиксирующий механизм для выборочной блокировки и разблокировки вращения ручки относительно проксимального компонента.
11. Устройство для артроскопической резекции по п. 1, отличающееся тем, что приводной механизм включает храповик, соединенный с возможностью поворота с проксимальным компонентом, при этом храповик включает один или более передающих зубцов, имеющих такие размеры и выполненных так, чтобы взаимодействовать с зубцами гребенки на дистальном компоненте так, что поворачивание храповика относительно проксимального компонента перемещает передающие зубцы относительно зубцов гребенки для удлинения канюлированного раздвигаемого внешнего элемента, когда храповик поворачивается в первом направлении, и укорачивания канюлированного раздвигаемого внешнего элемента, когда храповик поворачивается во втором направлении, противоположном первом направлению.
12. Устройство для артроскопической резекции по п. 1, отличающееся тем, что приводной механизм включает рычаг, соединенный с возможностью поворота с проксимальным компонентом, при этом рычаг включает дистальный конец, имеющий такие размеры и выполненный таким образом, чтобы взаимодействовать с пазом на дистальном компоненте так, что поворачивание рычага относительно проксимального компонента толкает первую сторону паза для удлинения канюлированного раздвигаемого внешнего элемента, когда рычаг поворачивается в первом направлении, и толкает вторую сторону паза, противоположную первой стороне паза, для укорачивания канюлированного раздвигаемого внешнего элемента, когда рычаг поворачивается во втором направлении, противоположном первому направлению.
13. Устройство для артроскопической резекции по п. 1, отличающееся тем, что приводной механизм включает ручку, соединенную с дистальным компонентом, при этом ручка выполнена с возможностью перемещения в направлении, поперечном продольной оси дистального компонента, и при этом ручка включает нижнюю часть с увеличенным диаметром в по меньшей мере ее части, при этом ручка проходит через часть проксимального компонента, и при этом часть, через которую проходит ручка, включает более широкие части, в которые может помещаться нижняя часть ручки, и более узкую часть, в которую нижняя часть ручки не может помещаться, так что когда ручка находится ближе к дистальному компоненту, нижняя часть ручки не контактирует с проксимальным компонентом и дистальный компонент может перемещаться относительно проксимального компонента для удлинения или укорачивания канюлированного раздвигаемого внешнего элемента, и когда ручка находится дальше от дистального компонента, нижняя часть ручки контактирует с проксимальным компонентом и вставлена в более узкую часть проксимального компонента и дистальный компонент закреплен относительно проксимального компонента.
14. Устройство для артроскопической резекции по п. 13, отличающееся тем, что ручка смещается от дистального компонента так, что нижняя часть ручки смещается, чтобы контактировать с проксимальным компонентом, а дистальный компонент смещается, чтобы быть закрепленным относительно проксимального компонента.
15. Система для резекции и удаления ткани, содержащая:
устройство для артроскопической резекции, содержащее:
канюлированный раздвигаемый внешний элемент, содержащий проксимальный компонент и дистальный компонент, который выполнен с возможностью перемещения относительно проксимального компонента для удлинения и укорачивания канюлированного раздвигаемого внешнего элемента;
внутренний элемент, выполненный с возможностью соединения с возможностью вращения с проксимальным компонентом канюлированного раздвигаемого внешнего элемента и выполненный с таким размером, чтобы проходить по меньшей мере частично через канюляцию канюлированного раздвигаемого внешнего элемента; и
приводной механизм, который соединен с возможностью перемещения с проксимальным компонентом и соединен с возможностью перемещения с дистальным компонентом канюлированного раздвигаемого внешнего элемента так, что перемещение приводного механизма относительно проксимального компонента осуществляет удлинение или укорачивание канюлированного раздвигаемого внешнего элемента посредством перемещения дистального компонента относительно проксимального компонента; и
приводной мотор, соединенный с устройством для артроскопической резекции посредством соединения с канюлированным раздвигаемым внешним элементом для прикрепления приводного мотора к устройству для артроскопической резекции и соединенный со внутренним элементом так, что во время работы приводной мотор поворачивает внутренний элемент; и
источник вакуума, соединенный с возможностью передачи текучей среды с устройством для артроскопической резекции для перемещения отрезанной ткани через устройство для артроскопической резекции и наружу него.
16. Система по п. 15, отличающаяся тем, что дистальный компонент канюлированного раздвигаемого внешнего элемента представляет собой трубку.
17. Система по п. 15, отличающаяся тем, что проксимальный компонент канюлированного раздвигаемого внешнего элемента представляет собой втулку внешнего элемента.
18. Система по п. 15, отличающаяся тем, что проксимальный компонент канюлированного раздвигаемого внешнего элемента представляет собой втулку внешнего элемента с канюляцией, а дистальный компонент канюлированного раздвигаемого внешнего элемента представляет собой трубку, при этом трубка выполнена с такими размерами и таким образом, чтобы скользить в продольном направлении в канюляции втулки внешнего элемента.
19. Система по п. 15, отличающаяся тем, что внутренний элемент содержит втулку внутреннего элемента, расположенную проксимально относительно канюлированного раздвигаемого внешнего элемента, вал, соединенный со втулкой внутреннего элемента так, что он помещен в канюляцию канюлированного раздвигаемого внешнего элемента, и фрезу, соединенную с валом.
20. Система по п. 15, отличающаяся тем, что внутренний элемент включает фрезу на своем дистальном конце, которая представляет собой одно из: шарообразная фреза, фреза с плоским рабочим торцом, фреза с винтовыми зубьями и сверло.
21. Система по п. 15, отличающаяся тем, что когда канюлированный раздвигаемый внешний элемент находится в удлиненном состоянии, фреза на дистальном конце внутреннего элемента не выступает за пределы дальнего дистального конца канюлированного раздвигаемого внешнего элемента.
22. Система по п. 15, отличающаяся тем, что когда канюлированный раздвигаемый внешний элемент находится в укороченном состоянии, фреза на дистальном конце внутреннего элемента по меньшей мере частично выступает за пределы дальнего дистального конца канюлированного раздвигаемого внешнего элемента.
23. Система по п. 15, отличающаяся тем, что внутренний элемент включает отверстие, проходящее от места вблизи его проксимального конца к месту вблизи его дистального конца, к которому может быть подключен источник вакуума для перемещения отрезанной ткани через внутренний элемент и наружу устройства для артроскопической резекции.
| US 4723545 A, 09.02.1988 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Устройство для учета количества молока при доении | 1989 |
|
SU1676537A1 |
| EP 1938757 A1, 02.07.2008 | |||
| Устройство для обработки плоских костей | 1976 |
|
SU596229A1 |

