Нижеследующее относится к графической области. Оно описывается со ссылкой на медицинские прикладные задачи в качестве примера, в котором структуры медицинского изображения должны быть определены перед планированием лучевой терапии или планированием других медицинских процедур. Однако нижеследующее относится большей частью к определению структур практически в любом типе трехмерного изображения, трехмерной карты или т.п. и к применениям, отличным от планирования лучевой терапии, например к визуализации или другой обработке изображения после получения, функциям придания формы в трехмерном изображении, чтобы дать возможность просмотра или другой обработки изображения после получения скрытых анатомических структур, оценке характеристик поглощения у структур для использования в последующем восстановлении информации с помощью ОЭКТ или ПЭТ, или т.д.
В онкологической лучевой терапии (иногда называемой радиотерапией) ионизирующее излучение применяется для подавления или замедления роста раковых опухолей или новообразований. Однако проблематично то, что излучение также неблагоприятно воздействует на окружающую здоровую ткань.
В модулированной по интенсивности лучевой терапии один или более пучков излучения применяется к пациенту с конфигурацией, смещенной к облучению раковой опухоли или новообразованию и смещенной от облучения биологически важной здоровой ткани. В подходах с неподвижным пучком множество пересекающихся пучков применяются одновременно, так что пучки перекрываются внутри пациента. Пространственный профиль интенсивности пучка у каждого пучка управляется, например, с помощью многолепестковых коллиматоров. С помощью подходящего выбора пространственных профилей интенсивности пучка и принимая во внимание пересечение составляющих лучей от разных пучков внутри пациента может быть получен необходимый трехмерный профиль интенсивности излучения в пациенте. В томографических подходах, по меньшей мере, один пучок вращается или двигается пошагово вокруг пациента, причем пространственный профиль интенсивности пучка изменяется во время вращения или движения, так что суммарная доза радиоактивного облучения соответствует необходимому трехмерному профилю внутри пациента.
Эффективное применение модулированной по интенсивности лучевой терапии зависит от наличия априорного знания о форме и размере раковой опухоли или новообразования, а также наличия априорного знания о форме и размере соседних важных тканей, чье радиоактивное облучение должно быть сведено к минимуму или поддерживаться ниже порогового значения. В распространенном подходе это априорное знание получается с использованием методики рентгенографии, например, трансмиссионной компьютерной томографии (CT), однофотонной эмиссионной компьютерной томографии (SPECT), позитрон-эмиссионной томографии (PET), магнитно-резонансной томографии (MRI) или т.п. Для планирования радиотерапии CT имеет преимущество в предоставлении анатомической информации и характеристик поглощения излучения у ткани. Последнее, как правило, принимается во внимание во время планирования сеанса лучевой терапии для более точного вычисления трехмерного профиля излучения. Некоторые примеры методик для планирования сеанса модулированной по интенсивности лучевой терапии на основе изображений для планирования CT описываются, например, у McNutt и др., патент США №6735277.
Во время планирования радиотерапии анализируется изображение для планирования CT для определения раковой опухоли или новообразования, а также важных структур, чье радиоактивное облучение должно быть ограничено. Одним из подходов является моделирование интересующей структуры с использованием сетки поверхности и использование методики автоматизированной деформации сетки, чтобы деформировать сетку для соответствия поверхности интересующей структуры. Как правило, поверхность задается градиентами интенсивности в CT-изображении.
Контурная обработка важных и целевых структур является сложным, трудоемким и отнимающим много времени процессом. Например, контурная обработка головы и шеи в трехмерном изображении или карте перед лучевой терапией может занимать несколько часов. Для усовершенствования этого процесса разработаны алгоритмы автоматизированной сегментации и применены к вычерчиванию органов с повышенным риском в различных участках обработки, например простата, печень, грудь, легкие и мозг. В одном подходе многоугольная сетка с треугольными элементами деформируется при ограничениях эластичности и особенности изображения, чтобы соответствовать поверхности объекта на изображении. Априорное знание кодируется в таком алгоритме путем предоставления средних сеток для инициализации и кодирования характеристик в отношении диапазона значений серого, интенсивности градиента и т.д. на поверхности в каждой модели.
Существующие методики автоматизированной деформации сетки, однако, имеют некоторые ограничения. Например, если поверхность интересующей структуры не четко определена, то подходящая сетка может быть неточной или неясной. Некоторые структуры, например лимфатические узлы в шее, обладают достаточно плохим контрастом изображения, чтобы эффективно препятствовать автоматизированной сегментации по этим особенностям. В другом случае большая часть структуры может обладать достаточным контрастом изображения, чтобы дать возможность автоматизированной сегментации, но некоторые части изображаемой структуры могут проявлять плохой контраст изображения, приводя к сбою или значительным ошибкам в автоматизированной сегментации в этих областях с плохим контрастом.
Известным является дополнение особенностей изображения нарисованными вручную контурами. Например, публикация международной заявки № WO 2004/111937 A1 авторов Pekar и др. раскрывает подход для применения методик деформации в областях трехмерного набора данных, сделанного из двумерных срезов. Там, где срезы дают недостаточно информации об особенности, так что автоматизированная сегментация терпит неудачу, пользователь может вручную задать точки притяжения в проблематичных срезах. Нарисованные вручную точки притяжения затем используются во время последующей автоматизированной деформации сетки, чтобы направлять автоматизированную сегментацию в проблематичных осевых срезах.
Также известно обеспечение возможности ручного взаимодействия с сеткой, например, с помощью обеспечения пользователя графическим интерфейсом пользователя и операционным взаимодействием с помощью указательного инструмента нажатия и перетаскивания (например, мыши). Например, публикация международной заявки № WO 2004/053792 A1 авторов Kaus и др. раскрывает способ сегментирования трехмерной структуры с использованием автоматизированной оптимизации деформируемой сетки с исходным и/или последующим ручным перемещением вершин сетки или узлов в выбранные области автоматизированной подгонки сетки, при желании сопровождаемой дальнейшей оптимизацией сетки.
Подобные существующие методики не являются полностью удовлетворительными там, где большие части интересующей структуры плохо заданы в трехмерном изображении. Применение подхода Pekar к таким случаям требует рисования точек притяжения во многих срезах трехмерного набора данных, которые пересекают обширную часть или части интересующей структуры, имеющие плохой контраст. Это требует много времени и является утомительным процессом. Кроме того, может быть трудно для пользователя зрительно распознать интересующую структуру в изображении среза, чтобы нарисовать точки притяжения. Применение подхода Kaus к таким случаям требует исходной и/или корректирующей ручной регулировки множества вершин или узлов сетки, что опять требует много времени и является утомительным процессом.
В предложенном изобретении раскрываются варианты осуществления способа и устройства.
В примере способа схематического изображения интересующей структуры в трехмерном изображении или карте задаются, по меньшей мере, два контура, очерчивающих интересующую структуру. По меньшей мере, два контура лежат, по меньшей мере, в двух разных контурных плоскостях, которые отличаются и не параллельны относительно друг друга. Подгоняется трехмерная многоугольная сетка, в то же время соблюдая заданные контуры как ограничения по вершинам многоугольной сетки.
В примере устройства предоставляется интерфейс выбора плоскости для выбора контурной плоскости произвольной ориентации в трехмерном изображении или карте. Интерфейс контурной обработки предоставляется для задания контура в выбранной контурной плоскости. Конструктор сетки конфигурируется для создания трехмерной многоугольной сетки, очерчивающей интересующую структуру в трехмерном изображении или карте. Конструктор сетки размещает связанные вершины на или рядом с множеством некомпланарных контуров очертания, заданных с использованием интерфейса контурной обработки.
В примере устройства, которое функционирует в сочетании с процессом адаптивного лечения, сегментирующий процессор конфигурируется для вычерчивания структуры. Сегментирующий процессор включает в себя: (i) интерфейс контурной обработки, сконфигурированный для задания очерчивающих структуру контуров, по меньшей мере, в двух разных, непараллельных контурных плоскостях; и (ii) конструктор сетки для построения сетки с использованием процесса деформации сетки, ограниченной, по меньшей мере, заданными очерчивающими структуру контурами. Процессор планирования конфигурируется для определения параметров для адаптивного лечения объекта на основе вычерчивания с помощью сегментирующего процессора, по меньшей мере, одной интересующей структуры в трехмерном изображении или карте объекта.
Одно преимущество состоит в облегчении быстрой и точной сегментации или вычерчивания интересующих структур.
Другое преимущество состоит в эффективной интеграции ручных и автоматизированных входных данных в процесс деформации сетки.
Другим преимуществом является более быстрое и точное планирование процессов адаптивного лечения, например, модулированной по интенсивности лучевой терапии.
Другие преимущества настоящего изобретения будут оценены обычными специалистами в данной области техники после прочтения и понимания следующего подробного описания.
Изобретение может принимать форму различных компонентов и схем компонентов и различных этапов и схем этапов. Чертежи предназначаются только для целей иллюстрации предпочтительных вариантов осуществления и не должны быть истолкованы как ограничивающие изобретение.
Фиг.1 схематически показывает пример системы модулированной по интенсивности лучевой терапии, включающей в себя планирование на основе получения изображений CT.
Фиг.2 схематически показывает основные компоненты процессора 44 контурной обработки Фиг.1 со схематически указанными основными структурами данных и основным потоком данных.
Фиг.3 схематически показывает два примера контурных плоскостей, выбранных для изучения позвоночника S: фронтальную контурную плоскость P cor и наклонную контурную плоскость P obl, которая ориентирована перпендикулярно к фронтальной контурной плоскости P cor.
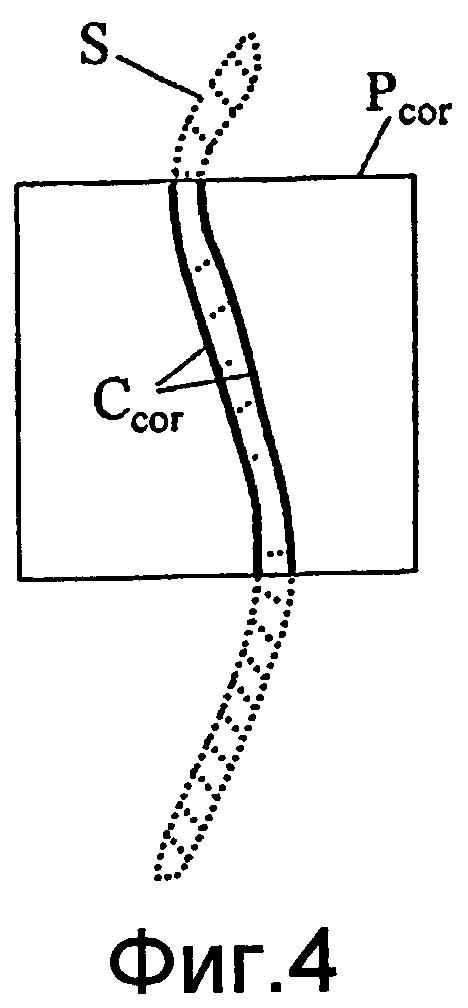
Фиг.4 схематически показывает контуры C cor, очерчивающие позвоночник S, заданные во фронтальной контурной плоскости P cor.
Фиг.5 схематически показывает контуры C obl, очерчивающие позвоночник S, заданные в наклонной контурной плоскости P obl.
Фиг.6 схематически показывает часть многоугольной сетки M S, имеющей треугольные элементы, деформированные для соответствия фронтальному и наклонному контурам C cor, C obl Фиг.4 и 5.
Фиг.7 схематически показывает основные компоненты оптимизатора 76 трехмерной сетки Фиг.1 и 2 со схематически указанными основными структурами данных и потоком данных.
Со ссылкой на Фиг.1, система 10 лучевой терапии включает в себя компьютерный томограф 12 для получения изображений планирования CT для использования в планировании сеанса модулированной по интенсивности лучевой терапии. Томограф 12 включает в себя рентгеновский источник 14, установленный на вращающейся раме 16, чтобы вращаться вокруг области 18 исследования, кушетку или другой стол 20 для помещения объекта в область 18 исследования и матрицу 22 детекторов рентгеновского излучения, размещенную на вращающейся раме 16 напротив рентгеновского источника 14 для обнаружения рентгеновских лучей после того, как они прошли через объект в области 18 исследования. Томограф 12 используется для получения данных проекции, например данных проекции для множества осевых срезов изображения (например, многослойный сканер CT), или набора данных спиральной трехмерной проекции (например, спиральный томограф), или т.д. Данные проекции сохраняются в запоминающем устройстве 24 данных изображений и восстанавливаются с помощью процессора 26 реконструкции с использованием подходящего алгоритма, например фильтрованной обратной проекции, чтобы сформировать множество последовательных осевых срезов изображения или других структур данных изображения, определяющих трехмерное изображение или карту объекта, которая сохраняется в запоминающем устройстве 28 изображений планирования. Томограф 12 управляется с помощью контроллера 30 томографа, который устанавливает или управляет параметрами сканирования, например, скоростью вращения рамы, шагом спирали (в случае спирального сканирования), интервалом осевого сканирования и так далее. Предусмотрен интерфейс 32 пользователя, включающий в себя, по меньшей мере, одно устройство ввода, например проиллюстрированную клавиатуру 34, указательное устройство, например, проиллюстрированная мышь 36 или т.д., и, по меньшей мере, одно устройство вывода, например проиллюстрированный дисплей 38, чтобы дать пользователю возможность взаимодействовать с контроллером 30 томографа для воздействия на томограф 12, чтобы получить изображения планирования для планирования сеанса модулированной по интенсивности лучевой терапии.
Описанный томограф 12 является пояснительным примером системы получения изображения или карты планирования. В других вариантах осуществления изображения планирования могут получаться с использованием системы однофотонной эмиссионной компьютерной томографии (SPECT), позитрон-эмиссионного (PET) томографа, магнитно-резонансного (MR) томографа или т.д. Кроме того, раскрытые в этом документе методики для вычерчивания интересующих структур в изображении планирования применимы к другим процессам адаптивного лечения, кроме модулированной по интенсивности лучевой терапии. Например, раскрытые в этом документе очерчивающие структуру методики применимы к планированию хирургического лечения, например имплантации стента. Здесь структура стента преимущественно определяется с помощью неинвазивного формирования изображений и вычерчивания сосуда в соответствии с раскрытыми в этом документе методиками, так что индивидуальный стент может быть сделан и иметься в распоряжении во время процедуры имплантации стента. Выбор системы получения изображения или карты планирования может быть основан на типе планируемого процесса адаптивного лечения. Например, в случае планирования имплантации стента подходит MR-томография, применяющая подходящее внутривенное магнитное контрастное вещество.
Более того, раскрытые в этом документе очерчивающие структуру методики имеют другие применения за пределами планирования процессов адаптивного лечения. Например, раскрытые в этом документе очерчивающие структуру методики могут использоваться в визуализации или другой обработке изображения после получения. В одном примере применения раскрытые в этом документе очерчивающие структуру методики используются для очерчивания органов, которым затем придается форма трехмерного изображения, чтобы дать возможность просмотра или другой обработки изображения после получения скрытых анатомических структур. В качестве еще одного примера применения раскрытые в этом документе очерчивающие структуру методики могут использоваться для оценки характеристик поглощения у структур для использования в последующем восстановлении данных изображения в SPECT или PET.
Возвращаясь к примеру применения модулированной по интенсивности лучевой терапии, проиллюстрированному на Фиг.1, система 12 получения изображения или карты планирования является обособленной от описываемой системы, модулированной по интенсивности лучевой терапии. Предпочтительно, чтобы координатные метки прикреплялись к объекту перед получением изображений планирования, и эти метки оставались на месте до последующего сеанса радиотерапии, чтобы обеспечить пространственное регистрирование между изображением или картой планирования и проведением радиотерапии. Рассматриваются также другие способы для пространственного регистрирования между системой получения изображения или картой планирования и системой радиотерапии, например, использование внутренних анатомических меток, таких как характерные структуры костей. Кроме того, также рассматривается интегрирование системы получения изображений планирования или картирования с устройством для радиотерапии, чтобы использовалась общая система координат как для получения изображений планирования, так и для лучевой терапии.
Продолжая ссылаться на Фиг.1, процессор 40 профилирования плотности при желании вычисляет контурную диаграмму плотности объекта. Такой профиль плотности, как правило, используется для оценки поглощения лечебного излучения во время лучевой терапии. Преимущественно, если методикой формирования изображений планирования является трансмиссионная CT, которая проиллюстрирована, то поглощение лечебного излучения, как правило, сравнительно точно оценивается на основе поглощения рентгеновских лучей из рентгеновской трубки 12, которое указывается в изображениях планирования CT. В некоторых вариантах осуществления раскрытые в этом документе очерчивающие структуру методики используются для очерчивания структур, для которых вычисляются профили или значения плотности. Например, кости могут вычерчиваться и им может назначаться плотность кости с помощью процессора 40 профилирования плотности, и аналогичным образом вычерчиваются другие ткани, например сердечная ткань, легочная ткань, мышечная ткань и так далее, и им назначаются соответствующие значения плотности ткани с помощью процессора 40 профилирования плотности. В этом последнем подходе методика получения изображений может быть радиационной (например, CT) или нерадиационной (например, MR), поскольку значения плотности назначаются на основе анатомической информации, а не на основе измеренного поглощения рентгеновских лучей.
Процессор 44 контурной обработки вычерчивает интересующие структуры. В случае модулированной по интенсивности лучевой терапии интересующие структуры могут включать в себя, например, целевую раковую опухоль или новообразование, важные структуры, чей уровень радиоактивного облучения должен быть ограничен, сильно поглощающие структуры, которые могут существенно препятствовать передаче лечебного излучения, и так далее. Информация об очертании структур может использоваться, например, процессором 40 профилирования плотности, который уже описан, или процессором 50 обратного планирования, или т.д.
Один пример подхода для планирования сеанса модулированной по интенсивности лучевой терапии на основе полученных изображений планирования CT выглядит следующим образом. Процессор 50 обратного планирования определяет пространственные профили интенсивности пучка для пучков лечебного излучения, которые обеспечивают необходимый трехмерный профиль интенсивности излучения в объекте. Трехмерный профиль должен обеспечивать достаточное излучение в целевую структуру (например, раковую опухоль или новообразование), чтобы оптимистически обеспечить ожидаемый лечебный эффект (как признается в данной области, изменчивость среди пациентов обуславливает, что ожидаемый лечебный эффект, к сожалению, может не возникать у некоторых пациентов или может возникать с той или иной степенью эффективности) при поддержании радиоактивного облучения важных структур, например, чувствительных жизненных органов, ниже выбранных пороговых уровней облучения. Например, доза излучения в 80 Гр может быть предназначена для области или областей, получающих радиотерапию, вместе с ограничением не более 20% от этого значения (то есть 16 Гр) для важной структуры, которая была бы, возможно, неблагоприятно затронута чрезмерным радиоактивным облучением. Планирование также при желании содержит системные ограничения, например максимальный лечебный уровень интенсивности излучения, доставляемый лечебным источником пучка, ограничения пространственной разрешающей способности или т.д. В одном подходе к планированию пучок лечебного излучения делится математически на массив или другое множество составляющих лучей, и вычисляются значения для составляющих лучей, которые обеспечивают необходимый суммарный трехмерный профиль излучения в объекте. Процессор 52 преобразования преобразует параметры составляющих лучей в настройки для многолепестковых коллиматоров, которые управляют (возможно, зависящим от времени) профилем интенсивности пучка или пучков лечебного излучения.
Контроллер 54 устройства передачи излучения приводит в действие устройство 56 передачи излучения в соответствии с информацией планирования, выданной процессором 52 преобразования, чтобы передать излучение объекту в соответствии с планом, определенным по изображениям планирования CT. Проиллюстрированный пример устройства 56 передачи излучения является томографом, который имеет неподвижную несущую конструкцию 58 с вращающимся плечом или рамой 60, на которой монтируется источник 62 лечебного излучения. В некоторых вариантах осуществления источник 62 включает в себя линейный ускоритель электронов (linac), который вырабатывает пучок ускоренных электронов, который падает на мишень, сделанную из вольфрама или другого материала, чтобы порождать лечебный пучок рентгеновских лучей или гамма-лучей для фотонной радиотерапии. В других вариантах осуществления источник 62 лечебного излучения производит другие типы излучения, например протонные пучки, нейтронные пучки, электронные пучки или т.д.
Рама 60 вращается, чтобы поворачивать источник 62 лечебного излучения вокруг пациента, который размещен на столе 64. В одном подходе стол 64 перемещает объект линейно во время вращения, чтобы реализовать спиральную орбиту источника излучения вокруг объекта. В другом подходе один срез или полоска облучается с неподвижным столом 64; если нужно облучить большую область, то стол 64 может перемещаться пошагово для облучения последовательности срезов или полосок. Во время применения лечебного излучения многолепестковый коллиматор 66 модулирует пространственный профиль интенсивности пучка лечебного излучения в соответствии с планом, выданным процессором 52 преобразования, чтобы суммарная доза радиоактивного облучения, переданная объекту, соответствовала намеченному трехмерному профилю излучения. Как правило, многолепестковый коллиматор 66 включает в себя массив индивидуально подвижных парных лепестков блокирования излучения, которые вместе определяют апертуру излучения с произвольными размерами и формой.
В проиллюстрированном томографическом устройстве 56 передачи излучения настройки многолепесткового коллиматора 66, как правило, меняются во время вращения источника 62, чтобы создать необходимый трехмерный профиль. В другом подходе множество источников излучения располагаются на расстоянии под углом вокруг объекта, причем пучки от источников излучения пересекаются в объекте. Каждый пучок имеет ассоциированный многолепестковый коллиматор, который задает пространственный профиль интенсивности пучка в соответствии с планом, разработанным по изображениям планирования CT, так что одновременно приложенные пучки, пересекающиеся в пациенте, обеспечивают необходимый трехмерный профиль.
Чтобы привести в соответствие положение объекта при проведении сеанса радиотерапии (то есть положение объекта на столе 64 в устройстве 56 применения лучевой терапии) с положением объекта в ранее полученных диагностических изображениях (то есть положением объекта на столе 20 в системе 12 CT), предпочтительно используются координатные метки. В подходящем варианте осуществления детекторы (не показаны) принимают маломощные рентгеновские лучи, созданные источником 62 излучения, чтобы реализовать визуализацию CT с низким разрешением, которая может использоваться для изображения координатных меток, которые были размещены на объекте перед диагностической визуализацией. В другом подходе отдельный томограф (не показан) интегрируется с устройством применения лучевой терапии для изображения координатных меток.
Описав варианты осуществления примера применения модулированной по интенсивности лучевой терапии относительно Фиг.1, варианты осуществления процессора 44 контурной обработки теперь описываются более подробно. Как показано на Фиг.1, процессор 44 контурной обработки включает в себя переключатель 70 контурных плоскостей, переключатель 72 контуров, генератор 74 трехмерной сетки и необязательный оптимизатор 76 трехмерной сетки.
Со ссылкой на Фиг.2, процессор 44 контурной обработки оперирует с трехмерным изображением или картой 80, сформированной томографом 12 и процессором 26 реконструкции, без учета какой-либо геометрической природы или особенностей получения изображения или карты. Например, трехмерное изображение или карта 80 могут быть получены в виде серий осевых срезов; однако, процессор 44 контурной обработки обрабатывает трехмерное изображение или карту 80 без учета осевых срезов. Переключатель 70 контурных плоскостей, работающий в сочетании с интерфейсом 32 пользователя, позволяет пользователю выбирать две или более контурных плоскостей 82. Например, трехмерное изображение или карта 80, или их часть отображается подходящим образом на дисплее 38, и пользователь работает с графическим указателем, используя мышь 36, клавиатуру 34 или другое устройство ввода для выбора контурных плоскостей 82. Вообще, две или более контурных плоскостей 82 должны включать в себя, по меньшей мере, две разные, непараллельные контурные плоскости, чтобы обеспечить адекватную контурную обработку трехмерной интересующей структуры. В некоторых вариантах осуществления, по меньшей мере, две разные, непараллельные контурные плоскости включают в себя, по меньшей мере, две разные, непараллельные плоскости, выбранные из группы плоскостей, состоящей из сагиттальной, фронтальной и осевой плоскостей. В некоторых вариантах осуществления, по меньшей мере, две разные, непараллельные контурные плоскости включают в себя, по меньшей мере, одну наклонную плоскость, не принадлежащую к группе плоскостей, состоящей из сагиттальной, фронтальной и осевой плоскостей.
Переключатель 72 контуров, работающий в сочетании с интерфейсом 32 пользователя, позволяет пользователю выбирать один или более контуров 84 очертания в каждой контурной плоскости 82. Например, одна из контурных плоскостей 82 или ее часть подходящим образом отображается на дисплее 38, и пользователь работает с графическим указателем, используя мышь 36, клавиатуру 34 или другое устройство ввода для рисования одного или более контуров в отображенной контурной плоскости 82. В одном подходе пользователь обозначает точки, которые лежат на контуре, и контур задается обозначенными точками и с помощью соединения отрезков прямой, которые соединяют обозначенные точки. Так как контурные плоскости 82 выбираются пользователем, возможно, что контурная плоскость ориентирована в анатомически значимом направлении, соответствующем интересующей структуре, что способствует более легкой и более точной контурной обработке. Кроме того, контуры 84 предпочтительно некомпланарны, чтобы обеспечить адекватную контурную обработку трехмерной интересующей структуры. Как правило, это условие удовлетворяется с помощью рисования контуров в каждой из двух или более разных, непараллельных контурных плоскостей 82.
Генератор 74 трехмерной сетки строит трехмерную многоугольную сетку 90, очерчивающую интересующую структуру в трехмерном изображении или карте 80. Сетка 90 включает в себя связанные вершины, каждая из которых размещена на или рядом с одним или более некомпланарным контуром 84 очертания. В некоторых вариантах осуществления сетка 90 строится путем размещения вершин сетки на контурах 84, без использования процесса деформации. В других вариантах осуществления сетка 90 строится, начиная с конфигурации 92 сетки по умолчанию, которая размещается близко к интересующей структуре (например, путем помещения ее в центр ограничивающего прямоугольника, содержащего контуры 84, или в центр тяжести контуров 84, или в другое среднее или центральное положение, заданное очерчивающими контурами 84, или путем помещения конфигурации 92 сетки по умолчанию в центр тяжести или другое среднее или центральное положение в изображении интересующей структуры в трехмерном изображении или карте 80), и необязательного запуска оптимизатора 76 трехмерной сетки для деформирования сетки, чтобы сформировать трехмерную многоугольную сетку 90, очерчивающую интересующую структуру в трехмерном изображении или карте 80. При желании, размещение конфигурации 92 сетки по умолчанию включает в себя вращение, преобразование, масштабирование или иное манипулирование с конфигурацией сетки по умолчанию, чтобы выровнять контуры 84 и/или изображение интересующей структуры, например, используя подход ICP-положений.
Продолжая ссылаться на Фиг.2 и дополнительно ссылаясь на Фиг.3-6, описывается работа процессора 44 контурной обработки в примере вычерчивания позвоночного столба, который мог бы быть полезен, например, при планировании сеанса модулированной по интенсивности лучевой терапии для лечения рака легких. Фиг.3 показывает фронтальный вид позвоночного столба. Можно увидеть, что S-образный позвоночник S лежит в основном во фронтальной плоскости P cor. Соответственно, пользователь преимущественно выбирает фронтальную плоскость P cor в качестве одной из контурных плоскостей 82, используя переключатель 70 контурных плоскостей, работающий в сочетании с интерфейсом 32 пользователя. Более того, чтобы соразмерно очертить позвоночник S в трехмерном пространстве, преимущественно выбирается вторая контурная плоскость. Проиллюстрированная наклонная плоскость P obl соответственно выбирается в качестве второй контурной плоскости 82, которая отличается от и непараллельна фронтальной контурной плоскости P cor. (Отметим, что наклонная контурная плоскость P obl наблюдается "под углом" и поэтому выглядит как линия на Фиг.3). Вообще, иногда предпочтительно выбрать две разные, непараллельные контурные плоскости, которые ориентированы практически перпендикулярно друг другу, как в случае для проиллюстрированного примера контурных плоскостей P cor и P obl. Фиг.4 показывает контуры C cor во фронтальной плоскости, нарисованные во фронтальной контурной плоскости P cor. Фиг.5 показывает контуры C obl в наклонной плоскости, нарисованные в наклонной контурной плоскости P obl. Фиг.6 показывает вид в перспективе части примера сетки M S, построенной генератором 74 трехмерной сетки для вычерчивания позвоночника S. Сетка M S включает в себя связанные вершины V C, которые ограничены нахождением на контурах или рядом с контурами C obl, C cor. В проиллюстрированной трехмерной многоугольной сетке M S применяются треугольные элементы; однако также может использоваться сетка из других многоугольных элементов, например четырехугольных элементов.
Со ссылкой на Фиг.7 иллюстрируется подходящий вариант осуществления оптимизатора 76 трехмерной сетки. Оптимизатор 76 сетки использует алгоритм минимизации энергии или силы. Определитель 100 связанных вершин определяет связанные вершины 102 как те вершины трехмерной многоугольной сетки 90, которые являются ближайшими к контурам 84. То есть, связанные вершины 102 определяются на основе минимального расстояния вершины от контуров 84. В некоторых вариантах осуществления связанные вершины 102 определяются с использованием преобразования евклидова расстояния.
В некоторых вариантах осуществления каждая из связанных вершин 102 перемещается на ближайший контур, например, с помощью проецирования вершины на контур. Связанные вершины 102 затем удерживаются в неподвижном положении во время деформации сетки 90. В других вариантах осуществления условия 104 энергии или силы ограничения вычисляются на основе минимального расстояния между каждой связанной вершиной и ее ближайшим контуром, и процесс деформации с минимизацией энергии или силы включает условия 104 энергии или силы ограничения в процесс минимизации.
Процессор 110 деформации минимизирует условия энергии или силы. Эти условия могут включать в себя, например, условия 104 энергии или силы ограничения, условия 112 энергии или силы на основе контраста, выведенные из контрастного вычерчивания, по меньшей мере, части интересующей структуры в трехмерном изображении или карте 80, и/или условия 114 энергии или силы деформации, выведенные из степени деформации трехмерной многоугольной сетки 90 из конфигурации 92 сетки по умолчанию. Необязательные условия 112 энергии или силы на основе контраста включают контраст изображения для интересующей структуры в процесс деформации сетки, тогда как необязательные условия 114 энергии или силы деформации вычисляют математическое ожидание того, что сетка 90 не должна отклониться слишком далеко от ожидаемой, т.е. конфигурации 92 сетки по умолчанию. С помощью назначения необязательных условий энергии или силы ограничения доминирующими (например, большими) деформация сильно смещается к размещению каждой связанной вершины на ближайшем контуре или рядом с ним. В других вариантах осуществления каждая связанная вершина проецируется на ближайший контур и не перемещается процессором 110 деформации.
В качестве другого примера подхода для обращения со связанными вершинами 102 задается функция плавной начальной деформации на основе переноса каждой связанной вершины на ближайший очерчивающий контур. Другие вершины в окрестности связанной вершины перемещаются согласно вектору переноса, умноженному на гладкую гауссову функцию геодезического расстояния до связанной вершины. Связанные вершины 102 служат в качестве граничных условий в процессе деформации, тогда как оставшиеся переносы вершин используются в вычислении внешней энергии, которая минимизируется процессом деформации.
В некоторых вариантах осуществления трехмерная многоугольная сетка 90 деформируется с помощью процессора 110 деформации на основе минимизации внутренней энергии E=Σ(xi - yi)2, где xi и yi вершины сетки, соединенные одной границей, которые должны соответствовать граничным условиям (например, наличие связанных вершин в неизменных положениях на контурах 84) или дополнительного включения одного или более условий 104, 112, 114 энергии или силы, которые при суммировании задают критерий Е энергии.
В некоторых вариантах осуществления процесс деформации, реализованный процессором 110 деформации, является итеративным процессом, и связанные вершины 102 повторно определяются процессором 100 связанных вершин во время каждой итерации. В этом подходе подмножество вершин сетки 90, которые составляют связанные вершины, может изменяться от одной итерации к следующей. В некоторых вариантах осуществления количество связанных вершин является неизменным. В некоторых вариантах осуществления количество связанных вершин задается в соответствии с длиной контуров 84, при допущении того, что должна быть постоянная линейная плотность связанных вершин на каждой единичной длине контура. В других вариантах осуществления количество связанных вершин не является неизменным, и любая вершина, чье минимальное расстояние от ближайшего контура 84 очертания меньше порогового значения, определяется в качестве связанной вершины. Также могут использоваться другие методики.
Снова ссылаясь на Фиг.2, процессор 44 контурной обработки может применяться различными способами. В практически ручном подходе пользователь задает два или более разных, непараллельных контура 84, используя контурную плоскость и компоненты 70, 72 переключателя контуров наряду с интерфейсом 32 пользователя. Контуры 84 могут быть изогнутыми или прямыми отрезками, или замкнутыми контурами. В некоторых обстоятельствах интересующая структура может быть полностью очерчена двумя разными непараллельными контурами 84, например очерчивающим контуром в каждой из сагиттальной плоскости и фронтальной плоскости. Вычерчивание с помощью только небольшого количества контуров (возможно, даже двумя контурами) разрешается путем предоставления возможности формировать контур в произвольной контурной плоскости так, что могут быть заданы контуры в разных, непараллельных плоскостях. Эффективная быстрая контурная обработка дополнительно усовершенствуется путем выбора контурных плоскостей в качестве анатомически значимых направлений, которые содержат интересующую структуру, например, проиллюстрированный пример плоскостей P cor и P obl, которые анатомически значимы по отношению к примеру позвоночника S. Сетка 90 деформируется таким образом, что контуры являются подмножеством поверхности сетки, тогда как оставшаяся часть сетки деформируется согласно ограничению по внутренней энергии, чтобы обеспечить топологическую целостность сетки. Предпочтительно, чтобы, по меньшей мере, два из очерчивающих контуров были перпендикулярны или почти перпендикулярны друг другу. Если результирующая сетка не является приемлемой, то может выполняться многократное ручное уточнение, в котором пользователь анализирует сетку 90, наложенную на изображение 80 на дисплее 38, и существующие очерчивающие контуры корректируются или к ним добавляются дополнительные очерчивающие контуры, чтобы дополнительно ограничить и улучшить форму сетки 90. В более автоматизированном подходе сетка может быть изначально деформирована, чтобы соответствовать изображению согласно Фиг.7, с последующим ручным заданием контуров 84 для исправления областей, где автоматически подогнанная сетка не является приемлемой. После ручного задания контуров может выполняться дополнительная автоматизированная адаптация для контуров, действующих с жесткими ограничениями.
Кроме того, может применяться процессор 44 контурной обработки для корректировки контуров для последующих сеансов лучевой терапии адаптивным способом. Например, предполагается, что изображения планирования для планирования последующего сеанса лучевой терапии будут аналогичны изображениям планирования для предыдущего сеанса лучевой терапии. Отличия могут включать в себя уменьшенный размер раковой опухоли или новообразования вследствие положительного эффекта от лучевой терапии, смещение или сдвиг органов или других структур со временем, или т.д. Эти незначительные изменения легко вычисляются с помощью пользовательской корректировки контурных плоскостей и/или очерчивающих контуров, при желании включающей в себя дополнительную автоматизированную оптимизацию. Раскрытый процессор 44 контурной обработки может аналогичным образом использоваться для корректировки очерчивающей сетки между сеансами других типов процессов адаптивного лечения.
Изобретение описано со ссылкой на предпочтительные варианты осуществления. После прочтения и осмысления предшествующего подробного описания могут возникнуть модификации и изменения. Подразумевается, что изобретение создается как включающее в себя все такие модификации и изменения в той мере, как они входят в объем прилагаемой формулы изобретения либо ее эквивалентов.





Изобретение относится к средствам контурной обработки целевых структур в рентгенографии. Техническим результатом является повышение точности сегментации интересующих структур. В способе вручную задают два контура, очерчивающих интересующую структуру, причем два контура лежат в двух разных контурных плоскостях, которые отличаются и не параллельны относительно друг друга; и автоматически подгоняют трехмерную многоугольную сетку к интересующей структуре в трехмерном изображении или карте, соблюдая вручную заданные контуры как ограничения по вершинам многоугольной сетки. 5 н. и 19 з.п. ф-лы, 7 ил.
1. Способ вычерчивания интересующей структуры в трехмерном изображении или карте (80), содержащий этапы, на которых:
вручную задают, по меньшей мере, два контура (84, Ccor, Cobl), очерчивающие интересующую структуру, причем, по меньшей мере, два контура лежат, по меньшей мере, в двух разных контурных плоскостях (82, Pcor, Pobl), которые отличаются и не параллельны относительно друг друга; и автоматически подгоняют трехмерную многоугольную сетку (90, MS) к интересующей структуре в трехмерном изображении или карте (80), соблюдая вручную заданные контуры как ограничения по вершинам многоугольной сетки.
2. Способ по п.1, в котором этап автоматической подгонки включает в себя определение подмножества вершин в трехмерной многоугольной сетке (90, MS) в качестве связанных вершин (102, VC), которые необходимо разместить на вручную заданных контурах или рядом с ними.
3. Способ по п.2, в котором этап определения включает в себя
определение подмножества вершин на основе минимального расстояния вершины, по меньшей мере, от двух вручную заданных контуров (84, Ccor, Cobl).
4. Способ по п.3, в котором автоматическая подгонка является итеративным процессом деформации, и определение повторяется для каждой итерации деформирования.
5. Способ по п.4, в котором подмножество вершин, определенных в качестве связанных вершин (102, VC), изменяется между, по меньшей мере, двумя последовательными итерациями итеративного процесса деформирования.
6. Способ по п.3, в котором минимальное расстояние, используемое для выбора, задается с помощью преобразования евклидова расстояния.
7. Способ по п.3, в котором автоматическая подгонка применяет процесс деформации с минимизацией энергии или силы, и выбранные ограничения по связанным вершинам, соответствующие, по меньшей мере, двум вручную заданным контурам (84, Ccor, Cobl), включают в себя этап, на котором: учитывают условие (104) энергии или силы ограничения для каждой связанной вершины, причем условие энергии или силы ограничения зависит от минимального расстояния вершины, по меньшей мере, от двух вручную заданных контуров.
8. Способ по п.7, в котором процесс деформации с минимизацией энергии или силы дополнительно включает в себя условия (112) энергии или силы на основе контраста, выведенные из контрастного вычерчивания, по меньшей мере, части интересующей структуры в трехмерном изображении или карте (80).
9. Способ по п.8, в котором процесс деформации с минимизацией энергии или силы дополнительно включает в себя условия (114) энергии или силы деформации, выведенные из степени деформации трехмерной многоугольной сетки (90), исходя из конфигурации (92) сетки по умолчанию.
10. Способ по п.3, в котором автоматическая подгонка включает в себя:
проецирование каждой связанной вершины на ближайший, по меньшей мере, из двух вручную заданных контуров (84, Ccor, Cobl).
11. Способ по п.2, в котором автоматическая подгонка включает в себя:
минимизацию сочетания условий силы или энергии, включающих, по меньшей мере, (i) условия (104) силы или энергии ограничения, относящиеся к минимальным расстояниям связанных вершин, по меньшей мере, от двух вручную заданных контуров (84, Ccor, Cobl), и (ii) условия (114) энергии или силы деформации, относящиеся к отклонению трехмерной многоугольной сетки (90) от конфигурации (92) сетки по умолчанию.
12. Способ по п.1, в котором этап, на котором вручную задают контуры, включает:
ручной выбор, по меньшей мере, двух разных контурных плоскостей (Pcor) из группы плоскостей, состоящей из сагиттальной, фронтальной и осевой плоскостей.
13. Способ по п.1, в котором этап, на котором вручную задают контуры, включает:
ручной выбор, по меньшей мере, двух разных контурных плоскостей, включающих, по меньшей мере, одну наклонную плоскость (Pobl), не принадлежащую к группе плоскостей, состоящей из сагиттальной, фронтальной и осевой плоскостей.
14. Устройство для вычерчивания интересующей структуры в трехмерном изображении или карте (80), содержащее:
устройство интерфейса (32, 70), посредством которого пользователь выбирает плоскости для выбора контурной плоскости (82) произвольной ориентации в трехмерном изображении или карте (80);
устройство интерфейса (32, 72) контурной обработки, посредством которого пользователь задает контур (84, Ccor, Cobl) в выбранной контурной плоскости; и устройство конструктора (74, 76) сетки, выполненное с возможностью построения трехмерной многоугольной сетки (90), очерчивающей интересующую структуру в трехмерном изображении или карте, причем устройство конструктора сетки выполнено с возможностью размещения связанных вершин (102, VC) на или рядом с множеством некомпланарных контуров (84, Ccor, Cobl) очертания, заданных с использованием устройства контурного интерфейса, при этом устройство конструктора сетки включает в себя:
устройство оптимизатора (76) сетки, выполненное с возможностью автоматического деформирования трехмерной многоугольной сетки (90) с помощью деформирования, смещенного к размещению каждой связанной вершины (102, VC) на или рядом с ближайшим некомпланарным контуром (84, Ccor, Cobl) очертания.
15. Устройство по п.14, в котором устройство конструктора (74, 76) сетки размещает связанные вершины (102, VC) на некомпланарных контурах (84, Ccor, Cobl) очертания.
16. Устройство по п.14, дополнительно включающее:
указательное устройство (36); и дисплей (38); причем указательное устройство и дисплей являются компонентами каждого из устройства интерфейса (32, 70) выбора плоскости и устройства интерфейса (32, 72) контурной обработки.
17. Устройство по п.14, в котором устройство интерфейса (32, 70) выбора плоскости выполнено с возможностью ручного выбора осевой, сагиттальной или фронтальной контурной плоскости (Pcor), а устройство интерфейса (32, 72) контурной обработки выполнено с возможностью ручного задания контура (Ccor) в упомянутой осевой, сагиттальной или фронтальной контурной плоскости.
18. Устройство по п.17, в котором устройство интерфейса (32, 70) выбора плоскости дополнительно конфигурируется для предоставления возможности ручного выбора наклонной контурной плоскости (Pobl), которая не является осевой, сагиттальной или фронтальной плоскостью, а устройство интерфейса (32, 72) контурной обработки конфигурируется для предоставления возможности ручного задания контура (Cobl) в упомянутой наклонной контурной плоскости.
19. Устройство планирования радиотерапии, включающее:
устройство для вычерчивания интересующей структуры в трехмерном изображении или карте (80) по п.14,
процессор (50, 52) планирования, выполненный с возможностью планирования сеанса радиотерапии на основе трехмерного изображения или карты (80) и построенной трехмерной многоугольной сетки (90), очерчивающей интересующую структуру в трехмерном изображении или карте.
20. Устройство для радиотерапии, включающее:
устройство для вычерчивания интересующей структуры в трехмерном изображении или карте (80), процессор (50, 52) планирования, выполненный с возможностью планирования сеанса радиотерапии на основе трехмерного изображения или карты (80) и построенной трехмерной многоугольной сетки (90), очерчивающей интересующую структуру в трехмерном изображении или карте, и систему (54, 56) радиотерапии для выполнения запланированного сеанса радиотерапии.
21. Устройство для адаптивного лечения, содержащее:
сегментирующий процессор (44), выполненный с возможностью вычерчивания структуры, причем сегментирующий процессор включает в себя
(i) устройство интерфейса (32, 70, 72) контурной обработки, посредством которого пользователь задает очерчивающие структуру контуры (84, Ccor, Cobl), по меньшей мере, в двух разных, непараллельных контурных плоскостях (82), и
(ii) устройство конструктора (74, 76) сетки для построения трехмерной многоугольной сетки (90), используя процесс деформации сетки, ограниченной, по меньшей мере, заданными вручную очерчивающими структуру контурами в, по меньшей мере, двух непараллельных плоскостях; и процессор планирования (50, 52), выполненный с возможностью определения параметров для адаптивного лечения объекта на основе вычерчивания с помощью сегментирующего процессора, по меньшей мере, одной интересующей структуры в трехмерном изображении или карте (80) объекта.
22. Устройство по п.21, в котором процессор (50, 52) планирования включает в себя: процессор (50) обратного планирования для определения параметров составляющих лучей для передачи выбранного профиля излучения к объекту; и процессор (52) преобразования для преобразования параметров составляющих лучей в параметры управления для системы (54, 56) модулированной по интенсивности радиотерапии.
23. Устройство по п.22, дополнительно включающее:
упомянутую систему (54, 56) модулированной по интенсивности радиотерапии, выполненную с возможностью передачи излучения объекту в соответствии с упомянутыми параметрами управления.
24. Устройство по п.21, в котором сегментирующий процессор (44) и процессор (50, 52) планирования выполнены с возможностью повторного применения для последующих сеансов адаптивного лечения, чтобы корректировать параметры для адаптивного лечения между сеансами.
| ПОВЫШЕНИЕ КАЧЕСТВА ИНТРАВАСКУЛЯРНОГО УЛЬТРАЗВУКОВОГО ИЗОБРАЖЕНИЯ И ОБРАБОТКИ СИГНАЛОВ | 1998 |
|
RU2238041C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОБЪЕМА ОРГАНОВ ИЛИ ОБРАЗОВАНИЙ ПРИ МЕДИЦИНСКОМ ОБСЛЕДОВАНИИ | 2003 |
|
RU2284146C2 |
| JP 7128259 А, 19.05.1995 | |||
| P.W.De Bryin et al | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Karangelis G | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

