Изобретение относится к комплексам навигации, управления и наведения летательных аппаратов (ЛА).
В наиболее близком аналоге, приведенном в книге [1] (Бабич O.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991 г.) на стр.6-16, 391-507, представлена комплексная навигационная система (КНС) ЛА, включающая в себя навигационные датчики и системы, работающие на различных физических принципах, а также вычислительно-логические блоки, обеспечивающие информационный обмен между датчиками и системами и расчет необходимых параметров состояния ЛА: блок компенсации ошибок КНС; блок формирования параметров состояния ЛА; блок формирования невязки, обеспечивающий сравнение однотипной информации, поступающей от двух различных измерителей; блок фильтрации, обеспечивающий фильтрацию полученной невязки и формирование оценок ошибок КНС. При работе КНС из-за наличия различных погрешностей датчиков и систем параметры движения ЛА определяются с ошибками. В вычислителе комплекса реализуется (см. [1], стр.391) метод комплексирования информации, предусматривающий проведение статистической фильтрации информации двух или нескольких систем и получении корректирующих поправок для одной из них (корректируемой). На основе скорректированной информации осуществляется расчет основных параметров состояния и движения ЛА (азимуты и дальности до ориентиров, отклонения от заданной траектории, координаты, скорости, ускорения, углы ориентации ЛА - см., например, литературу [1], стр.171-301).
Основным недостатком наиболее близкого аналога является то, что при расхождениях реальных ошибок и используемых в алгоритмах моделей погрешностей комплексная система становится малоэффективной.
Задачей изобретения является повышение точности КНС и как следствие этого повышение эффективности работы ЛА, снабженных КНС.
Достигается указанный результат тем, что содержащая базовую навигационную систему, блок корректирующих средств, блок компенсации ошибок, блок формирования параметров состояния, блок формирования невязки, причем выход базовой навигационной системы подключен к первому входу блока компенсации ошибок, выход блока компенсации ошибок подключен к входу блока формирования параметров состояния и к первому входу блока формирования невязки, выход блока корректирующих средств подключен ко второму входу блока формирования невязки, комплексная навигационная система дополнительно снабжена блоком формирования свободной невязки, первый и второй входы которого подключены к выходу базовой навигационной системы и выходу блока корректирующих средств соответственно; блоком селекции оценок и невязок, первый и второй входы которого подключены к выходу блока формирования невязки и выходу блока формирования свободной невязки соответственно, выход блока селекции оценок и невязок подключен к второму входу блока компенсации ошибок, выходы/входы блока селекции оценок и невязок подключены к входам/выходам блока сетевой фильтрации; блоком сетевой фильтрации, каждый вход/выход которого подключен к одному из выходов/входов блока селекции оценок и невязок.
На чертеже представлена блок-схема комплексной навигационной системы, в составе которой содержатся:
1 - базовая навигационная система БНС;
2 - блок корректирующих средств БКС;
3 - блок компенсации ошибок КО;
4 - блок формирования параметров состояния ФПС;
5 - блок формирования невязки ФН;
6 -блок формирования свободной невязки ФСН;
7 - блок селекции оценок и невязок СОН;
8 - блок сетевой фильтрации БСФ.
Информационный обмен между входами-выходами блоков осуществляется по линиям связи, показанным на чертеже тонкой сплошной линией. Линии связи представляют собой известные (описанные, например, в книге [2], стр.21-24, 394-406) линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др.
Блоки БНС 1 и БКС 2 представляют собой известные датчики и системы бортового оборудования ЛА, описанные в литературе, например [1], стр.8-16, 171-243, 316-317, 325-327, 374-385. В состав блока БНС 1 входят, например, инерциальная навигационная система (ИНС), решающая задачу автономного счисления скорости, координат и угловой ориентации объекта на основе измеряемых с помощью акселерометров и гироскопов, входящих в ИНС, ускорений и угловых скоростей (или углов ориентации) объекта; курсовертикаль, решающая задачу счисления скорости и угловой ориентации объекта на основе измерительной информации гироскопов и акселерометров; система воздушных сигналов СВС, измеряющая статические, динамические, полные давления воздуха, с помощью которых решаются задачи определения высоты и скорости объекта относительно атмосферы. В состав блока БКС 2 входят, например, радиосистема ближней навигации (РСБН), измеряющая азимут радиомаяка и дальность до него, с помощью которых при известных координатах радиомаяка решается задача определения координат объекта; радиосистема дальней навигации (РСДН), измеряющая дальности до нескольких наземных радиостанций, с помощью которых при известных координатах станций решается задача определения координат объекта; доплеровский измеритель скорости и сноса (ДИСС), измеряющий доплеровские сдвиги частот излучаемых радиосигналов, с помощью которых решается задача определения вектора скорости объекта; спутниковая навигационная система (СНС), измеряющая временную задержку, фазовый сдвиг и доплеровский сдвиг частоты радиосигналов от космических спутников, с помощью которых при известных параметрах движения спутников решается задача определения времени, координат и скорости объекта; средства визирования ориентиров (целей), измеряющие дальности до ориентиров и/или углы их визирования, с помощью которых при известных координатах ориентиров решается задача определения координат объекта; измерители параметров различных геофизических поверхностных и пространственных полей: поля рельефа, магнитного поля, гравитационного поля, поля радиолокационного контраста, с помощью которых при известных закономерностях распределений этих полей в околоземном пространстве решается задача определения координат объекта.
Вычислительно-логические блоки КО 3, ФПС 4, ФН 5, ФСН 6, СОН 7, БСФ 8 выполнены, например, в виде однопроцессорных вычислителей ([2], стр.31).
Блок КО 3 обеспечивает коррекцию параметров, выдаваемых БНС 1, на величину оценок ошибок базовой системы, полученной с помощью блоков фильтрации.
Блок ФПС 4 обеспечивает расчет параметров состояния ЛА, включающего в себя координаты, скорость, ускорение и углы ориентации ЛА относительно заданной базовой системы отсчета на основе решения соответствующих уравнений, связывающих эти параметры с измеряемыми величинами, поступающими с выхода блока БНС 1 в блок КО 3, где производится их коррекция (см., например, книгу [1], стр.7-8, 117-158, 171-283).
Блок ФН 5 обеспечивает формирование невязки между однотипными параметрами движения ЛА: с одной стороны, измеренными с помощью БНС 1 и скорректированными с помощью КО 3, а с другой стороны - измеренными с помощью БКС 2.
Дополнительно введенный блок ФСН 6 обеспечивает формирование невязки между однотипными параметрами движения ЛА, измеренными с помощью БНС 1, с одной стороны, и с помощью БКС 2 - с другой стороны. При этом в отличие от блока ФН 5, в блоке ФСН 6 в формировании невязки участвуют нескорректированные значения параметров движения ЛА, измеренные блоком БНС 1.
Дополнительно введенный блок СОН 7 обеспечивает анализ функциональных возможностей подключенных к нему блоков фильтрации, выявляет среди них тот, который наилучшим образом соответствует сложившимся условиям функционирования КНС на борту ЛА, и подает на его вход невязку, сформированную в блоке ФН 5, а на входы остальных блоков фильтрации подает невязку, сформированную в блоке ФСН 6. Кроме того, блок СОН 7 обеспечивает выбор из оценок ошибок, сформированных отдельными блоками фильтрации, наилучших и подачу их в блок КО 3 для учета в алгоритме работы КНС.
Блок сетевой фильтрации БСФ 8, содержащий в своем составе n фильтров Ф-j (j=1, 2...n), обеспечивает формирование оценок ошибок базовой навигационной системы.
КНС работает следующим образом.
Измеряемая информация о параметрах движения ЛА Ji (i=БНС, БКС) из блоков БНС 1 и БКС 2 поступает на входы блоков ФСН 6 и ФН 5. При этом информация Ji (i=БНС), поступающая на один из входов блока ФН 5, предварительно проходит через блок КО 3, в котором производится ее коррекция на величину оценок  , поступающих в блок КО 3 с первого выхода блока СОН 7. В блоках ФСН 6 и ФН 5 формируются невязки между информацией базовой навигационной системы и корректирующих средств путем вычитания соответствующих величин, в результате чего на выходе блока ФСН 6 формируется вектор Zраз=Z(JБНС-JБКС), а на выходе блока ФН 5 формируется вектор
, поступающих в блок КО 3 с первого выхода блока СОН 7. В блоках ФСН 6 и ФН 5 формируются невязки между информацией базовой навигационной системы и корректирующих средств путем вычитания соответствующих величин, в результате чего на выходе блока ФСН 6 формируется вектор Zраз=Z(JБНС-JБКС), а на выходе блока ФН 5 формируется вектор
 .
.
Здесь  - скорректированная величина вектора JБКС, равная разности между JБКС и
- скорректированная величина вектора JБКС, равная разности между JБКС и  , a Z() - функция, с помощью которой описывается алгоритм формирования невязки (см., например, [1], стр.421-422, 429-430, 434-436, 451-460, 476-478; [3], стр.161-255).
, a Z() - функция, с помощью которой описывается алгоритм формирования невязки (см., например, [1], стр.421-422, 429-430, 434-436, 451-460, 476-478; [3], стр.161-255).
Введение в состав КНС блока ФСН 6 обеспечивает расчет свободной невязки между базовой навигационной системой и средствами коррекции, что позволяет строить сеть независимых фильтров, необходимую для обеспечения соответствия моделей ошибок, используемых при коррекции, и реальных ошибок системы.
В блоке ФПС 4 производится обработка информации базовой навигационной системы в соответствии с общим уравнением (см., например [1], стр.171-178, 189-195, 216-224, 225-229, 236-240, 316-327, 374-385):
где N - многомерный вектор определяемых параметров, включающий координаты, скорость, ускорение, углы ориентации ЛА;
 - измерительная информация, поступающая от базовой навигационной системы, скорректированная на величину полученных поправок;
- измерительная информация, поступающая от базовой навигационной системы, скорректированная на величину полученных поправок;
К - априорная информация, используемая в алгоритмах и включающая в себя информацию о координатах и скоростях спутников, радиомаяков, небесных светил, наземных ориентиров, геометрические характеристики навигационного пространства, параметры геофизических полей (атмосферы, гравитационного, магнитного, рельефа, радионавигационных и т.п.);
 - алгоритм (оператор) обработки информации.
- алгоритм (оператор) обработки информации.
В блоке ФПС 4 определяются многомерный вектор N и основные параметры состояния и движения ЛА (азимуты и дальности до ориентиров, отклонения от заданной траектории, координаты, скорости, ускорения, углы ориентации ЛА), необходимые для решения конкретных задач комплексной системы.
В блоке СОН 7 осуществляется формирование входных невязок для каждого из n фильтров Ф-j (j=1, 2,...n). Для этого в блоке СОН 7 постоянно рассчитываются ожидаемые величины дисперсий для оценок, получаемых разными фильтрами; при этом используется формула вида

в которой: М[у] - математическое ожидание величины y;
μj - разомкнутая входная невязка j-го (j=1,...n) фильтра, рассчитываемая с помощью формулы:


где Zраз - выходная величина блока ФСН 6;
 - векторная оценка ошибок базовой навигационной системы, полученная j-м фильтром.
- векторная оценка ошибок базовой навигационной системы, полученная j-м фильтром.
Сравнением величин дисперсий Рμj для разных j (j=1,...n) определяется номер jmin фильтра, соответствующий минимуму ожидаемой дисперсии. На вход/выход фильтра с номером jmin с выхода/входа блока СОН 7 подается невязка Zзам, сформированная в блоке ФН 5, на входы/выходы остальных фильтров подается невязка Zраз, сформированная в блоке ФСН 6. Кроме того, на выход блока СОН 7, подключенный ко второму входу блока КО 3, подается величина  оценки ошибок базовой навигационной системы, полученная в фильтре номером jmin.
оценки ошибок базовой навигационной системы, полученная в фильтре номером jmin.
Введение в состав КНС блока СОН 7 обеспечивает селекцию невязок и оценок для включения в контур коррекции фильтра, обеспечивающего лучшую точность, тем самым осуществляется оперативная подстройка моделей погрешностей, используемой при коррекции базовой навигационной системы.
В каждом j-м фильтре осуществляется обработка поступающей на его вход невязки Z (Zраз или Zзам) по алгоритму нестационарной вычислительно-устойчивой фильтрации (см. [1], стр.40-45; [3], стр.96-108) и для каждого k-го момента времени формируется оценка вектора ошибок в виде:

где
 - прогнозируемое j-м фильтром значение вектора ошибок в k-й момент времени;
- прогнозируемое j-м фильтром значение вектора ошибок в k-й момент времени;
 - полученная j-м фильтром оценка значения вектора ошибок в k-й момент времени;
- полученная j-м фильтром оценка значения вектора ошибок в k-й момент времени;
fj() - функциональная зависимость, устанавливающая связь между полученной оценкой вектора ошибок, с одной стороны, и прогнозируемой ее величиной и невязкой - с другой стороны, реализуемая в j-м фильтре;
 - рассчитанная для использования при коррекции базовой навигационной системы оценка ее ошибок, связанная с вектором с помощью функции ϕ(), имеющей, например, вид переприсваивания значений некоторых элементов вектора элементам вектора ([3], стр.124-129, 161-255).
- рассчитанная для использования при коррекции базовой навигационной системы оценка ее ошибок, связанная с вектором с помощью функции ϕ(), имеющей, например, вид переприсваивания значений некоторых элементов вектора элементам вектора ([3], стр.124-129, 161-255).
Вид алгоритмов, реализующих указанные функциональные зависимости, может быть, например, следующий:
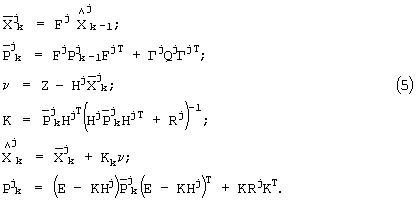
Здесь Е - единичная матрица;
 - прогнозируемое j-м фильтром значение оцениваемого вектора ошибок в k-тый момент времени;
- прогнозируемое j-м фильтром значение оцениваемого вектора ошибок в k-тый момент времени;
 - оценка j-м фильтром значения вектора ошибок в k-й момент времени;
- оценка j-м фильтром значения вектора ошибок в k-й момент времени;
 - прогнозируемое j-м фильтром значение ковариационной матрицы вектора ошибок в k-й момент времени;
- прогнозируемое j-м фильтром значение ковариационной матрицы вектора ошибок в k-й момент времени;
Pj k - оценка j-м фильтром ковариационной матрицы вектора ошибок в k-тый момент времени;
Qj, Rj - ковариационные матрицы входных и измерительных шумов соответственно, используемые j-м фильтром;
Fj, Гj, Нj - матрицы моделей ошибок, используемые j-м фильтром.
Фильтры Ф-j (j=1, 2,...n) различаются друг от друга размерностью оцениваемого вектора, способами формирования матриц Qj и Rj, видом матриц Fj, Гj, Нj. При этом оценки, получаемые в разных фильтрах, будут различаться между собой, причем одна из них будет наилучшим образом соответствовать реальной ситуации.
Введение в состав КНС блока БСФ 8, содержащего несколько (n штук) описанных фильтров Ф-j (j=1, 2,...n), позволяет одновременно получать n разных оценок ошибок базовой навигационной системы, причем каждая из этих оценок формируется с помощью своей модели погрешностей, вследствие чего появляется возможность выбора наилучшей оценки и повышения качества коррекции в целом.
Таким образом, введение в состав КНС описанных блоков обеспечивает гибкую оперативную подстройку оценок ошибок системы, используемых для ее коррекции, вследствие чего устраняется существенный недостаток наиболее близкого аналога и расширяются функциональные возможности комплексной навигационной системы.
На примерах технической реализации показано достижение технического результата в части расширения функциональных возможностей комплексной навигационной системы и как следствие повышение эффективности применения оснащаемых ею летательных аппаратов.
ЛИТЕРАТУРА.
1. Бабич O.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991 г.
2. Преснухин Л.Н., Нестеров П.В. Цифровые вычислительные машины. - М.: Высшая школа, 1981 г.
3. Ривкин С.С., Ивановский Р.И., Костров А.В. Статистическая оптимизация навигационных систем. - Л.: Судостроение, 1976 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2265190C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263281C1 |
| КОМПЛЕКС НАЧАЛЬНОЙ ВЫСТАВКИ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2003 |
|
RU2238522C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОПЕРАТИВНЫХ ЦЕЛЕЙ | 2008 |
|
RU2383468C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232376C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263280C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| СИСТЕМА КОМПЛЕКСНОЙ ОБРАБОТКИ ИНФОРМАЦИИ РАДИОНАВИГАЦИОННЫХ И АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ДЕЙСТВИТЕЛЬНЫХ ЗНАЧЕНИЙ ПАРАМЕТРОВ САМОЛЕТОВОЖДЕНИЯ | 2012 |
|
RU2487419C1 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2009 |
|
RU2392198C1 |
| СПОСОБ КОРРЕКЦИИ КООРДИНАТ, ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2547158C1 |
Изобретение относится к технике приборостроения, а именно к навигационным приборам для контроля и управления летательными аппаратами. Технический результат - повышение точности навигационных систем. Для достижения данного результата в систему дополнительно введен блок формирования свободной невязки, первый и второй входы которого подключены к выходу базовой навигационной системы и выходу блока корректирующих средств соответственно. При этом блок селекции оценок и невязок, первым и вторым входом подключены к выходу блока формирования невязки и выходу блока формирования свободной невязки соответственно. 1 ил.
Комплексная навигационная система, содержащая базовую навигационную систему, блок корректирующих средств, блок компенсации ошибок, блок формирования параметров состояния, блок формирования невязки, блок фильтрации, причем выход базовой навигационной системы подключен к первому входу блока компенсации ошибок, выход блока компенсации ошибок подключен к входу блока формирования параметров состояния и к первому входу блока формирования невязки, выход блока корректирующих средств подключен ко второму входу блока формирования невязки, отличающаяся тем, что комплексная навигационная система дополнительно снабжена блоком формирования свободной невязки, первый и второй входы которого подключены к выходу базовой навигационной системы и выходу блока корректирующих средств соответственно; блоком селекции оценок и невязок, первый и второй входы которого подключены к выходу блока формирования невязки и выходу блока формирования свободной невязки соответственно, выход подключен к второму входу блока компенсации ошибок, выходы/входы подключены к входам/выходам блока сетевой фильтрации; блоком сетевой фильтрации, каждый вход/выход которого подключен к одному из выходов/входов блока селекции оценок и невязок.
| БАБИЧ О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.6-16, 391-507 | |||
| WO 9748969 А, 24.12.1997 | |||
| US 4821216 А, 11.04.1997 | |||
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1996 |
|
RU2098322C1 |
| Крыжановский Г.А., Черняков М | |||
| В | |||
| Оптимизация авиационных систем передачи информации | |||
| - М.: Транспорт, 1986 | |||
| Прибор для измерения силы звука | 1920 |
|
SU218A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯ И СОРТИРОВКИ ГРУЗОВ | 0 |
|
SU324195A1 |

