Изобретение относится к области навигационных систем, а более конкретно к инерциально-спутниковой навигационной системе (ИСНС) и может быть использовано при создании комбинированных навигационных систем, имеющих точность выше, чем у комплексируемых инерциальной навигационной системы (ИНС) и спутниковой навигационной системы (СНС), а также способных с начального момента непрерывно определять (оценивать) текущие ошибки по скорости ИНС и сглаживать шумы по скорости приемника СНС.
Известны комбинированные ИСНС, в которых интеграция ИНС и СНС осуществляется на основе метода математического комплексирования использованием фильтра Калмана или его модификаций.
Например, ИСНС LN-100G ф. Литтон (США), LASEREF SM и H764G ф.Ханиуэлл (США), ЭИ "Авиационные системы и приборы" N 1, 1994 г., N 4 1991 г., а также ИСНС IRS45 ф.Сажем (Франция) ЭИ "Авиационные системы и приборы" N 24, 1990 г. и другие.
Недостатками этих ИСНС являются:
- точность комбинированной ИСНС не может быть выше точности приемника СНС, так как интеграция при математическом комплексировании осуществляется с использованием координат местоположения, определяемых им;
- необходимость иметь достоверные априорные данные по математической модели и статистике погрешностей ИНС;
- для выделения (оценки) составляющих ошибок ИНС, в частности дрейфов, требуется значительное время 15-20 минут, а иногда и более;
- низкая функциональная надежность фильтра Калмана из-за потери устойчивости в динамических режимах и недостоверности априорных данных;
- сложность получения достоверных априорных данных в условиях эксплуатации системы и реализации алгоритмов интеграции ИНС и СНС, а отсюда и дополнительные затраты.
Также известен способ физического комплексирования и комбинированная ИСНС, спроектированная на его основе, в которой при интеграции ИНС с СНС не используются априорные данные о математической модели и статистике погрешностей ИНС и координаты местоположения, определяемые приемником СНС, патент РФ N 2082098, заявка N 93045749 от 23.09.93 г.
Указанная комбинированная навигационная система выбрана по своей технической сущности и достигаемым результатам в качестве прототипа.
Комбинированная навигационная система содержит инерциальную навигационную систему, приемник спутниковой навигационной системы, кроме того, ее каждый горизонтальный канал включает первый сумматор, фильтр коррекции, второй сумматор, интегратор с обратной связью, третий сумматор, фильтр управления, причем первые выходы по скорости горизонтальных каналов инерциальной навигационной системы соединены с первыми входами первых сумматоров, вторые входы которых соединены с выходами по скорости соответствующих горизонтальных каналов приемника спутниковой навигационной системы, а выходы первых сумматоров соединены с входами фильтров коррекции, выходы которых соединены с первыми входами по угловой скорости контуров Шулера горизонтальных каналов инерциальной навигационной системы, вторые выходы по ускорению горизонтальных каналов инерциальной навигационной системы соединены с первыми входами вторых сумматоров, вторые входы которых соединены со вторыми выходами интеграторов с обратной связью, а выходы вторых сумматоров соединены с первыми входами интеграторов с обратной связью, первые выходы которых соединены с первыми входами третьих сумматоров, вторые входы которых соединены с выходами по скорости соответствующих горизонтальных каналов приемника спутниковой навигационной системы, а выходы третьих сумматоров соединены с вторыми входами интеграторов с обратной связью, вторые выходы которых соединены с входами фильтров управления, выходы фильтров управления соединены с вторыми входами по угловой скорости контуров Шулера соответствующих горизонтальных каналов инерциальной навигационной системы.
Известное устройство имеет следующие недостатки:
- определяется не полная текущая ошибка по скорости ИНС, а только ее часть (постоянная составляющая горизонтальных дрейфов), причем для этого требуется определенное время;
- управляющие и корректирующие сигналы от приемника СНС подаются на гироскопы горизонтальных каналов ИНС и в случае наличия сильных помех или сбоев в этих сигналах ИНС может терять функциональную надежность и не обеспечивать требуемой точности;
- необходимость аппаратурно-алгоритмической реализации каналов управления контуром Шулера от приемника СНС и выходных каналов ИНС по ускорению, что связано с дополнительными материальными затратами и снижением функциональной надежности системы.
Технический результат изобретения - достижение точности комбинированной системы выше, чем у комплексируемых ИНС и приемника СНС, непрерывное выделение с начального момента текущей ошибки по скорости ИНС, расширение области применения для платформенных и бесплатформенных ИНС, повышение функциональной надежности путем исключения управляющих сигналов на гироскопы.
Указанный технический результат достигается тем, что исключаются горизонтальные каналы управления гироскопами ИНС от приемника спутниковой навигационной системы и формирования выходной информации по ускорению, а управляющие сигналы с фильтров подаются не на гироскопы, а суммируются с выходными сигналами по скорости горизонтальных каналов ИНС, в результате чего полностью компенсируются собственные ошибки по скорости ИНС. Таким образом, инерциально-спутниковая навигационная система содержит инерциально-навигационную систему, приемник спутниковой навигационной системы, кроме того, в каждом горизонтальном канале первый, второй и третий сумматоры, фильтр коррекции, интегратор с обратной связью, фильтр управления, причем вторые входы первых сумматоров соединены с выходами по скорости соответствующих горизонтальных каналов приемника спутниковой навигационной системы, а выходы первых сумматоров соединены с входами фильтров коррекции, вторые входы вторых сумматоров соединены с вторыми выходами интеграторов с обратной связью, а выходы вторых сумматоров соединены с первыми входами интеграторов с обратной связью, первые выходы которых соединены с первыми входами третьих сумматоров, а выходы третьих сумматоров соединены с вторыми входами интеграторов с обратной связью.
Кроме того, в каждый горизонтальный канал инерциально-спутниковой навигационной системы дополнительно включены четвертый и пятый сумматоры, второй интегратор без обратной связи, а также блок вычисления навигационных параметров, причем выходы по скорости горизонтальных каналов инерциальной навигационной системы соединены с первыми входами четвертых сумматоров, вторые входы которых соединены с выходами фильтров управления, а выходы четвертых сумматоров соединены со входами блока вычисления навигационных параметров и с первыми входами первых сумматоров, вторые входы которых соединены с выходами по скорости соответствующих горизонтальных каналов приемника спутниковой навигационной системы, выходы фильтров коррекции соединены с первыми входами пятых сумматоров, вторые входы которых соединены с выходами по скорости соответствующих горизонтальных каналов приемника спутниковой навигационной системы, а выходы пятых сумматоров соединены со входами вторых интеграторов, выходы которых соединены со вторыми входами третьих сумматоров, первые входы которых соединены с первыми выходами интеграторов с обратной связью, а выходы третьих сумматоров соединены со вторыми входами интеграторов с обратной связью и входами фильтров управления, вторые входы интеграторов с обратной связью соединены со вторыми входами вторых сумматоров, первые входы которых соединены с выходами четвертых сумматоров, а выходы вторых сумматоров соединены с первыми входами интеграторов с обратной связью.
Сущность изобретения поясняется чертежами (фиг. 1 - 7).
На фиг. 1 схематично показаны состав комбинированной системы и связи между блоками.
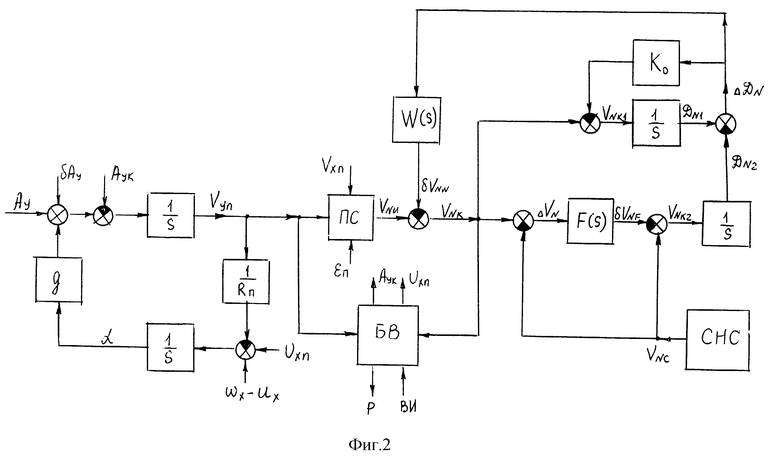
На фиг. 2 приведена функциональная структурная схема одного из двух идентичных горизонтальных каналов комбинированной системы.
На фиг. 3-7 графически изображены точностные характеристики комбинированной системы, полученные при моделировании ее работы в конкретных условиях эксплуатации.
Комбинированная ИСНС содержит (фиг. 1):
1.1, 1.2 - горизонтальные каналы ИНС с контуром Шулера;
2.1, 2.2 - первые сумматоры;
3.1, 3.2 - фильтры коррекции;
4 - приемник СНС;
5.1, 5.2 - вторые сумматоры;
6.1, 6.2 - первые интеграторы с обратной связью;
7.1, 7.2 - третьи сумматоры;
8.1, 8.2 - фильтры управления;
9.1, 9.2 - вторые интеграторы без обратной связи;
10.1, 10.2 - четвертые сумматоры;
11.1, 11.2 - пятые сумматоры;
12 - блок вычисления навигационных параметров.
На фиг. 2 приняты следующие обозначения:
α - ошибка построения вертикали по одному из горизонтальных каналов ИНС;
Ux - абсолютная угловая скорость по горизонтальной оси X сопровождающего трехгранника ИНС;
Ay - кажущееся ускорение по горизонтальной оси Y сопровождающего трехгранника ИНС;
δ Ay - погрешность ИНС в измерении ускорений по оси Y;
Ayk - сигнал на компенсацию кориолисовых ускорений по оси Y;
Uxn - сигнал на компенсацию угловой скорости вращения Земли по оси X;
ωx - суммарный дрейф ИНС по горизонтальному каналу X;
Vxn, Vyn - линейные относительные скорости, определяемые ИНС по горизонтальным осям (X, Y) сопровождающего трехгранника;
εп - азимутальный угол ИНС между горизонтальными осями сопровождающего трехгранника (X, Y) и географического трехгранника (E, N), определяется в алгоритме навигации ИНС;
Rn = 6,4•106 м - приведенный коэффициент интегральной коррекции контура Шулера горизонтальных каналов ИНС;
g - ускорение силы тяжести в месте положения ИНС;
ПС - преобразование скорости с осей сопровождающего трехгранника ИНС на географические оси;
БВ - блок вычисления навигационных параметров и компенсационных сигналов;
Р - выходные параметры ИНС;
ВИ - входная информация и исходные данные, необходимые для работоспособности ИНС;
VEИ, VNИ - линейные относительные скорости ИНС, определяемые по горизонтальным осям географического трехгранника (E, N);
F(s) - фильтр коррекции;
W(s) - фильтр управления;
VNС - линейная относительная скорость, определяемая СНС по горизонтальной оси N;
δVNW, δVNF - сигналы с выхода фильтров управления и коррекции;
VNК - линейная относительная скорость, определяемая комбинированной системой по горизонтальной оси N;
Kо - коэффициент усиления обратной связи первого интегратора;
1/s - символ интегрирования;
s - оператор Лапласа.
Комбинированная система работает следующим образом (фиг. 1, 2). Скорости (VNИ, VEИ) с горизонтальных каналов ИНС 1.1, 1.2 в географической системе координат направляют в сумматоры 10.1, 10.2, где к ним добавляют сигналы компенсации ошибок (δVNW, δVEW) с фильтров управления 8.1, 8.2. Скорректированные скорости (VNК, VEК) с выхода сумматоров 10.1, 10.2 поступают в блок вычисления навигационных параметров 12 (БВ) на алгоритм навигации комбинированной ИСНС, который по этим скоростям определяет координаты местоположения самолета. Сигналы компенсации ошибок (δVNW, δVEW) формируют с использованием скорости приемника СНС, для чего скорректированные скорости (VNК, VEК) с выхода сумматоров 10.1, 10.2 направляют в сумматоры 2.1, 2.2, где их сравнивают с аналогичными скоростями приемника СНС 4, с выхода сумматоров 2.1, 2.2 разности скоростей (ΔVN, ΔVE) поступают на фильтры коррекции 3.1, 3.2 и далее на сумматоры 11.1, 11.2, где к ним добавляют соответствующие скорости приемника СНС 4, с выхода сумматоров 11.1, 11.2 сигналы поступают через интеграторы 9.1, 9.2 на второй вход сумматоров 7.1, 7.2, на первый вход которых поступают сигналы с первого выхода интеграторов с обратной связью 6.1, 6.2, сигналы с выхода сумматоров 7.1, 7.2 поступают на второй вход интеграторов с обратной связью 6.1, 6.2, со второго выхода которых сигналы поступают на второй вход сумматоров 5.1, 5.2, а на их первый вход поступают сигналы с выхода сумматоров 10.1, 10.2, сигналы с выхода сумматоров 5.1, 5.2 поступают на первый вход интеграторов с обратной связью 6.1, 6.2, одновременно сигналы с выхода сумматоров 7.1, 7.2 поступают на вход фильтров управления 8.1, 8.2, которые формируют сигналы компенсации ошибок по скорости.
Технический результат достигается следующим образом.
В соответствии с фиг. 2 работу комбинированной ИСНС по одному из идентичных горизонтальных каналов можно описать следующей системой уравнений в преобразовании Лапласа (операторной форме).
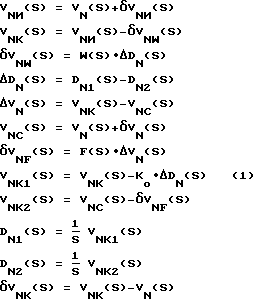
В системе уравнений (1) дополнительно обозначено:
δVNИ, δVNC, δVNK - ошибки по скорости, соответственно ИНС, СНС и комбинированной ИСНС в географической системе координат по оси N;
VN - составляющая скорости объекта по оси N.
Найдем решение системы уравнений (1) относительно сигналов с выхода фильтров управления (δVNW) , коррекции (δVNF) и ошибки по скорости комбинированной ИСНС (δVNK) .



Для обеспечения устойчивости работы комбинированной ИСНС и достижения поставленной цели при наименьших затратах на комплексирование фильтры управления и коррекции выбраны в следующем виде:
K1, K2, K3, K4 - коэффициенты фильтров.
Подставляя (5) в (2) - (4) и делая алгебраические преобразования, получим:


где a0 = 1
a1 = K0 + K4 + K2K4
a2 = K3 + K3•K2 + K1•K4 (9)
a3 = K1•K3
Условие устойчивости работы, на основании критерия Гурвица, будет
a1• a2 - a0• a3 > 0 (10)
Подставляя значение ai из (9) в (10), получим
[K0 + K4(1 + K2)][K3(1 + K2) + K1K4] - K1K3 > 0 (11)
Устойчивость комбинированной ИСНС может быть обеспечена с большим запасом, т.к. коэффициенты K0, K2, K4 входят только в левую положительную часть выражения (11). Исходя из условия (11), были проведены расчеты и анализ, на основании которого были выбраны значения коэффициентов, обеспечивающие фильтрацию систематической и низкочастотной (шулеровской) ошибки ИНС по скорости и координатам и сглаживание высокочастотной ошибки СНС по скорости.
K0 = 0,3 1/с, K1 = 5•10-2 1/с, K2 = 1, K3 = 8•10-3 1/с2, K4 = 8•10-2 1/с
Проанализируем установившееся значение δVNi (i = W, F, K) по выражениям (6) - (8) для систематических и медленно меняющихся ошибок ИНС (δVNИ) и СНС (δVNC). Высокочастотная ошибка по скорости СНС, как будет показано ниже, сглаживается фильтром. Для этого используем теорему о конечном значении
С учетом (12) установившееся значение выражений (6) - (8) во временной области будет
δVNW(t) = δVNИ(t)-δVNC(t) (13)
δVNF(t) = 0 (14)
δVNK(t) = δVNC(t) (15)
Как показывает выражение (13), выходной сигнал с фильтра управления δVNW (фиг. 2) равен разности ошибок по скорости ИНС и приемника СНС. У современных приемников СНС случайная ошибка (шум) по скорости составляет 0,1-0,01 м/с, а систематическая, как правило, на два порядка меньше, так как скорость получается путем дифференцирования координат. Например, в журнале "Авиационные системы" N 3-4 за 1997 г., издатель Научно-информационный центр ГосНИИАС, в статье "Совместное использование навигационных систем НАВСТАР и ГЛОНАСС для контроля целостности", авторы A. Masson, C. Vigneau, M.Cohin, M. Sebe приведены результаты испытаний французского приемника СНС R 100/20 при работе с системой ГЛОИАСС. По результатам испытаний ошибка по скорости приемника R 100/20 составила:
случайная составляющая (шум) - (1,3-1,5)•10-2 м/с;
систематическая составляющая (мат. ож.) - (2-6)•10-4 м/с.
Таким образом, учитывая, что систематическая ошибка δVNC(t) очень мала, из выражения (13) следует, что сигнал на выходе фильтра управления δVNW равен текущей ошибке по скорости ИНС (δVNИ) .
Из выражения (15) видно, что ошибка скорректированной скорости, по которой ведется счисление координат местоположения, не зависит от постоянной составляющей ошибки по скорости ИНС, а определяется только систематической ошибкой по скорости приемника СНС и динамической ошибкой по скорости ИНС с частотой Шулера. Тогда ошибку ИСНС в определении координат (δDNK1) от постоянной ошибки δVNC можно представить:
δDNK1(t) = δVNC•t (16)
При систематической ошибке δVNC = 3•10-4 м/с, получим: δDNK1 = 1,08 м за 1 час независимо от текущей ошибки приемника СНС по координатам, которая во много раз выше. Например, американские приемники СНС имеют ошибку определения координат порядка 100 м по грубому коммерческому каналу и 15-25 м - по точному (закрытому) каналу. Ошибку ИСНС в определении координат (δDNK2) в зависимости от ошибки ИНС по скорости, изменяющейся с периодом Шулера по закону δVNИ= Aucosνt или в преобразовании Лапласа δVNИ(S) = Au•S/(S2+ν2) , согласно (8), можно представить: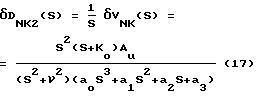
где Au - амплитуда ошибки ИНС по скорости;
ν - частота Шулера, ν = 1,2,3•10-3 1/с.
Установившееся значение ошибки δDNK2(t) будет иметь вид:
Найдем численное значение амплитуды ошибки δDNK2
Принимая амплитуду ошибки ИНС по скорости, равной Au = 1 м/с, и подставляя численные значения параметров в (18), получим, что амплитуда ошибки δDNK2 составляет 0,9 м. Оценим ошибки комбинированной ИСНС от шумов по скорости приемника СНС.
Примем, что ошибка по скорости приемника СНС изменяется по гармоническому закону δVNC= Acsinωt или в преобразовании Лапласа δVNC(S) = Ac•ω/(S2+ω2). Тогда, согласно (8) ошибку δVNK(S) в зависимости от δVNC(S) можно представить:
Соответственно, ошибка ИСНС в определении координат будет
Из выражения (19) видно, что ошибка δVNK3 изменяется по гармоническому закону с частотой ω . Переходя от изображения к оригиналу, амплитуду ошибки по скорости можно представить: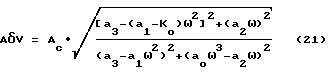
Соответственно, амплитуда ошибки в определении координат будет: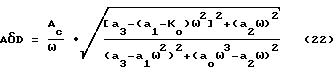
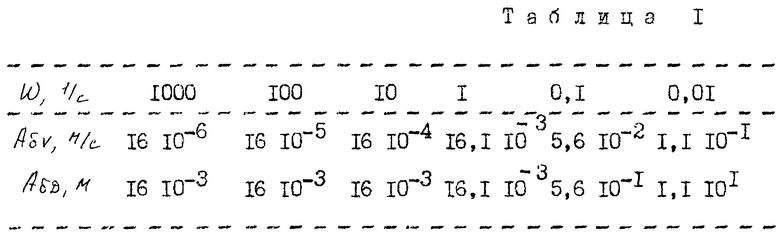
В таблице 1 приведены результаты расчетов амплитуд ошибок по выражениям (21), (22) в зависимости от частоты колебаний (шума) ошибки по скорости приемника СНС.
При расчетах приняли Aс = 0,1 м/с.
Как видно из таблицы 1, в диапазоне частот ( ω > 1 1/с), присущих приемникам СНС, динамическая ошибка ИСНС по скорости не превышает 1,6•10-2 м/с, а ошибка по координате составляет 0,016 м и практически не зависит от собственных шумов по скорости приемника СНС. Таким образом, доказано, что разомкнутый (без обратной связи по управляющим сигналам на гироскопы) фильтр физического комплексирования ИНС с СНС устраняет собственные ошибки ИНС (для ИНС, у которых погрешность в определении координат составляет 2 км за 1 час, эта ошибка в ИСНС не превышает 1 м независимо от времени) и в 5-6 раз снижает уровень шумов по скорости приемника СНС.
Это означает, что инструментальная точность ИСНС может быть обеспечена в пределах 1-2 м, то есть выше точности комплексируемых ИНС (2 км за 1 час) и приемника СНС (15 м - 100 м). С другой стороны, как показали расчеты, ошибка δVNC(t) в выражении (13) не превышает 1,6•10-2 м/с, поэтому фильтр управления с такой высокой точностью определяет непрерывно с начального момента текущую ошибку по скорости ИНС.
Для подтверждения полученного технического результата в динамических режимах и численной оценки характеристик было проведено математическое моделирование работы ИСНС в условиях полета самолета. При моделировании была принята известная математическая модель ИНС с периодом Шулера. Текущие скорости с горизонтальных каналов математической модели ИНС в географической системе координат (VNИ, VEИ) поступали на соответствующий вход фильтров, на другие входы которых поступали скорости приемника СНС (VNС, VEС) по скорректированным скоростям с выхода фильтров (VNК, VEК), определялись текущие координаты местоположения самолета (фиг. 2). Скорости приемника СНС задавались путем добавления к идеальным скоростям (VN, VE) ошибок в виде случайных колебаний с нулевым математическим ожиданием.
Уравнения фильтра по одному из горизонтальных каналов представлены выражением (1), аналогичные уравнения были использованы для другого горизонтального канала.
Моделирование проводилось при следующих условиях и исходных данных, ИСНС начинала работать с момента взлета самолета, который в течение 200 с набирал высоту и скорость и далее летел с постоянной скоростью 200 м/с, время полета составляет 5640 с. Начальное значение географической широты и долготы было принято равным ϕo = 50o, λo = 30o, а азимутальный угол ИНС относительно севера был равен нулю.
Инструментальные ошибки ИНС имели следующее значение:
- ошибки выставки ИНС в плоскость горизонта по каналу (X) - 1,5•10-4 рад, по каналу (Y) - 1•10-4 рад;
- ошибка выставки ИНС в азимуте - 2•10-3 рад;
- ошибка акселерометров δAx = 3•10-4 м/с2, δAy = 2•10-4 м/с2;
- дрейфы гироскопов, ωx= ωy = 4,45•10-8 1/с, ωz = -4,45•10-8 1/с.
Случайная ошибка по скорости приемника СНС задавалась в диапазоне частот (0,1-0,01) 1/с (в этом диапазоне частот вводятся искусственные помехи для коммерческих пользователей американской СНС), который наиболее сильно влияет на точность ИСНС (см. табл. 1), амплитуда ошибки не превышала ±0,12 м/с.
Шаг интегрирования при моделировании был равен 1 секунде, что соответствует времени обновления информации современных приемников СНС.
Результаты моделирования приведены на фиг. 3-7, на которых ранее принятым присвоены новые обозначения в кодах программы ПЭВМ:
time - время работы ИСНС (с);
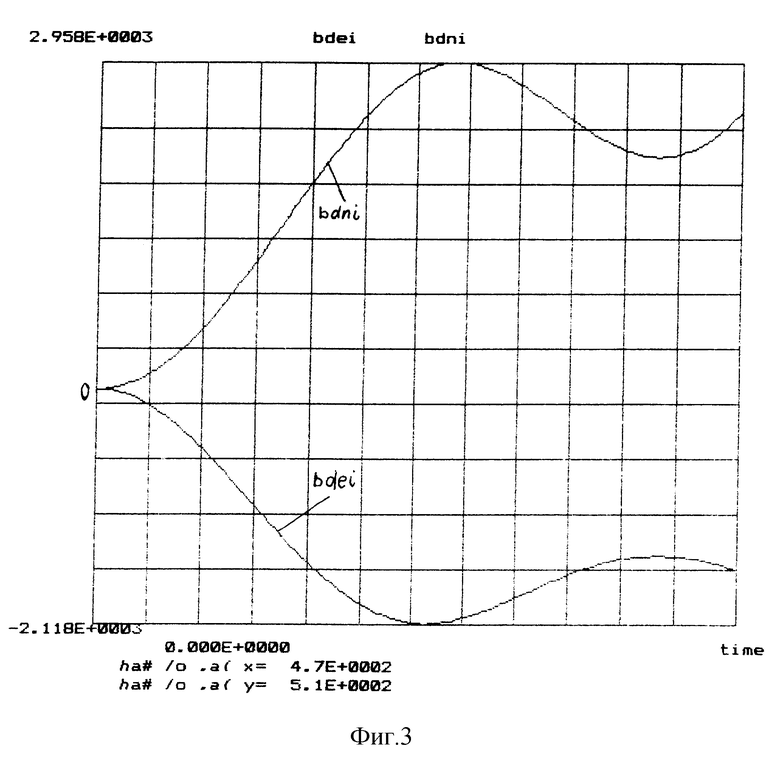
bdei, dbni - ошибки ИНС в определении географических координат местоположения самолета (параллельное счисление по скоростям ИНС);
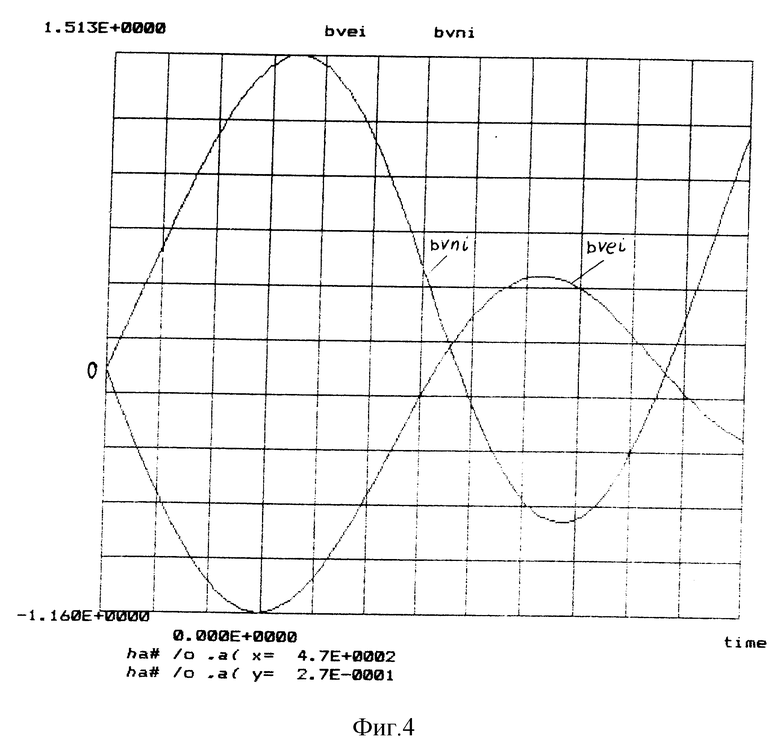
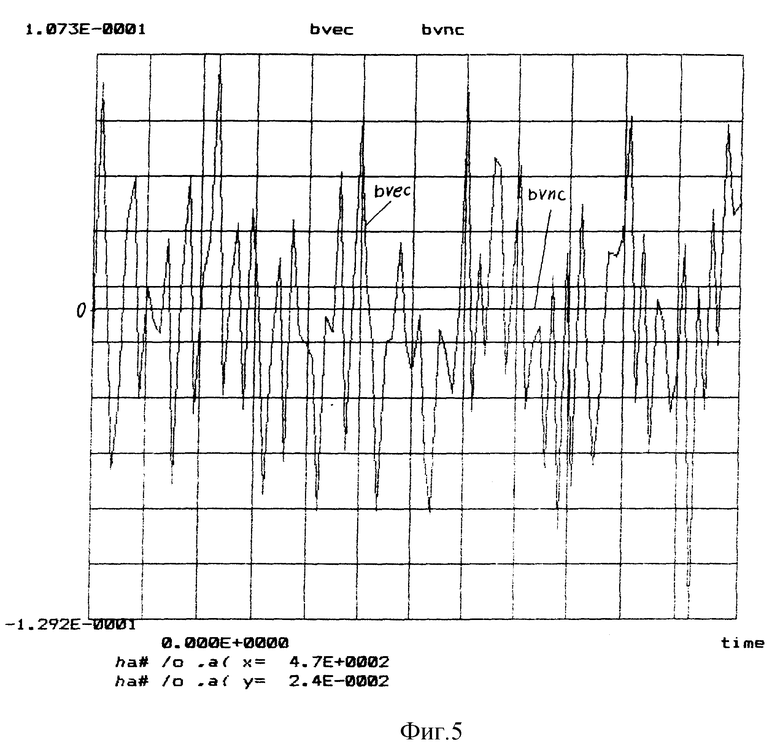
bvei, bvni - ошибки ИНС в определении скорости по горизонтальным осям географической системы координат (м/с),
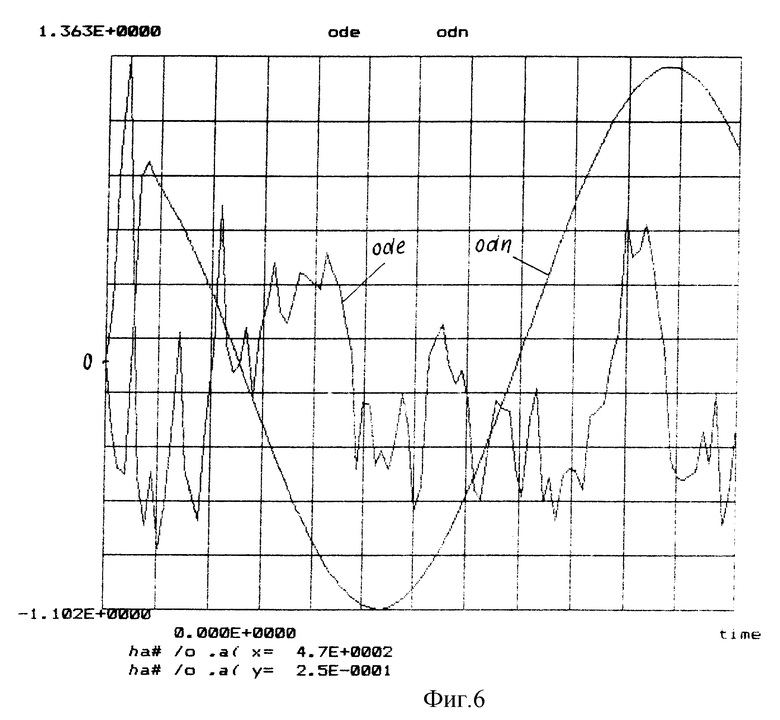
ode, odn - ошибки комбинированной ИСНС в определении географических координат местоположения (счисление по скоростям VEК, VNК) (м);
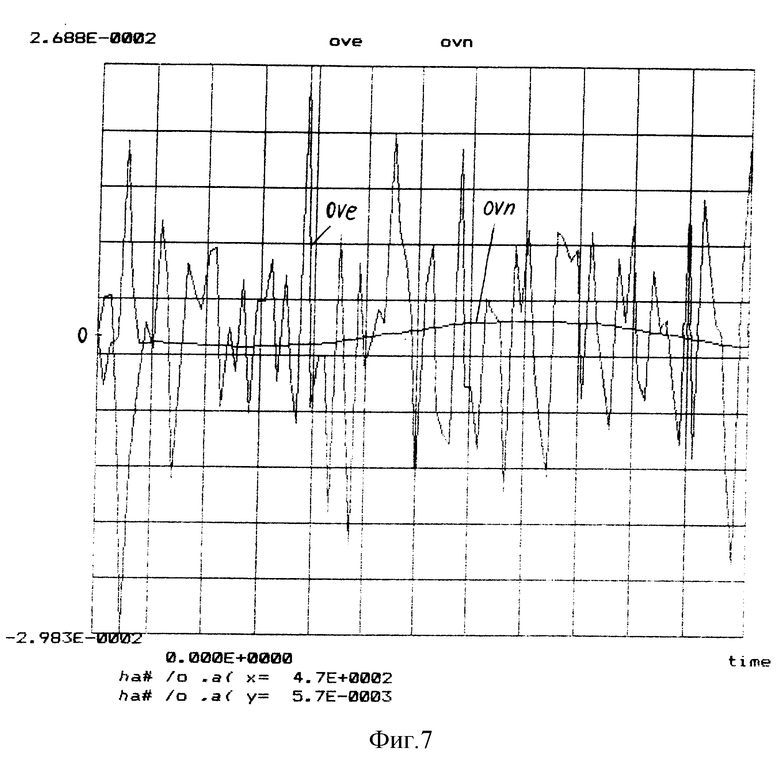
ove, ovn - ошибки комбинированной ИСНС в определении скорости по горизонтальным осям географической системы координат (м/с);
bvec, bvnc - ошибки приемника СНС в определении скорости по горизонтальным осям географической системы координат (м/с);
X - масштаб одной клетки по горизонтальной оси времени (X = 470 с на всех чертежах);
Y - масштаб одной клетки по вертикальной оси.
На фиг. 3-4 показаны ошибки ИНС в определении географических координат местоположения и скорости по горизонтальным каналам.
За время моделируемого полета 5640 с ошибка ИНС по координате (N) не превышала 3 км, а по координате (E) - 2,1 км, соответственно по скорости 1,51 м/с и 1,16 м/с.
На фиг. 5 показаны ошибки по скорости приемника СНС, для сравнения ошибку задавали по каналу (E), причем в наиболее критичном низкочастотном диапазоне (0,1 1/с - 0,01 1/с), см. табл. 1.
Во время моделирования ошибки по скорости приемника СНС находились в диапазоне (+0,11)-(-0,13) м/с.
На фиг. 6, 7 показаны ошибки комбинированной ИСНС в определении географических координат и скорости. Ошибки комбинированной ИСНС в определении координат и скорости изменяются с частотой Шулера, на которую наложена частота ошибки по скорости приемника СНС. За время моделируемого полета 5640 с ошибка в определении координат не превышает ±1,4 м, а ошибка по скорости ±0,03 м/с, сравнивая ошибки (фиг. 3 - фиг. 7) ИНС, СНС и ИСНС, можно утверждать, что точность ИСНС в определении скорости и координат намного выше, чем у отдельных систем ИНС и СНС. Например, ошибка ИСНС в определении координат составляет ±1,4 м, ИНС - 2-3 км за 1 час, а СНС - 15-100 м.
Согласно выражениям (2), (13) и фиг. 7, фильтр ИСНС с начального момента работы определяет текущую ошибку по скорости ИНС с точностью ±0,03 м/с.
Таким образом, результаты моделирования совпадают с аналитическими расчетами и подтверждают технический результат и цель предложения. Основная цель предложения, в отличие от прототипа, достигнута без подачи управляющих сигналов на гироскопы, сформированных по информации о скорости приемника СНС и использования сигналов с акселерометров, что повышает функциональную надежность ИНС и расширяет область использования для платформенных и бесплатформенных ИНС.
Комбинированная ИСНС может быть использована на летательных аппаратах, морских судах и наземных средствах передвижения для точного определения навигационных данных и рекомендована для внедрения организациям и фирмам, занимающимся созданием, испытаниями и эксплуатацией ИНС, ИСНС и навигационных комплексов, построенных на их основе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2003 |
|
RU2233431C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| СПОСОБ ИНТЕГРАЦИИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И САМОИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2386108C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178147C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КУРСА | 2000 |
|
RU2178146C1 |
| СПОСОБ ИЗМЕРЕНИЯ КУРСА ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2178145C1 |
| АВИАНАВИГАТОР | 2011 |
|
RU2457438C1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЫРАБОТКИ ПАРАМЕТРОВ УГЛОВОЙ ОРИЕНТАЦИИ КОРПУСА СУДНА | 2014 |
|
RU2573119C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2486527C2 |
Изобретение относится к навигационным системам, а именно к инерциально-спутниковым навигационным системам (ИСНС). Техническим результатом изобретения является достижение точности ИСНС выше, чем у комплексируемых ИНС и приемника СНС, непрерывное выделение с начального момента текущей ошибки по скорости ИНС, повышение функциональной надежности путем исключения управляющих сигналов на гироскопы, применение для платформенных и бесплатформенных ИНС. Указанный технический результат достигается тем, что из системы исключаются горизонтальные каналы управления гироскопами ИНС, а управляющие сигналы с фильтров суммируются с выходными сигналами по скорости горизонтальных каналов, кроме того, в каждый горизонтальный канал комбинированной системы дополнительно включены четвертый и пятый сумматоры и второй интегратор без обратной связи, а также блок вычисления навигационных параметров. 7 ил., 1 табл.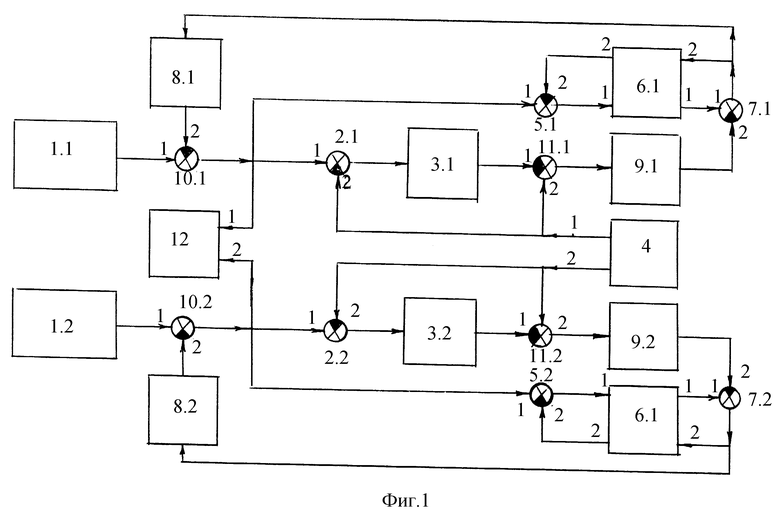
Инерциально-спутниковая навигационная система, содержащая приемник спутниковой навигационной системы, кроме того, в каждом горизонтальном канале первый, второй и третий сумматоры, фильтр коррекции, интегратор с обратной связью, фильтр управления, причем вторые входы первых сумматоров соединены с выходами по скорости соответствующих горизонтальных каналов приемника спутниковой навигационной системы, а выходы первых сумматоров соединены со входами фильтров коррекции, вторые входы вторых сумматоров соединены со вторыми выходами интеграторов с обратной связью, а выходы вторых сумматоров соединены с первыми входами интеграторов с обратной связью, первые выходы которых соединены с первыми входами третьих сумматоров, выходы третьих сумматоров соединены со вторыми входами интеграторов с обратной связью, отличающаяся тем, что в каждый горизонтальный канал инерциально-спутниковой навигационной системы дополнительно включены четвертый и пятый сумматоры, второй интегратор без обратной связи, а также блок вычисления навигационных параметров, причем выходы по скорости горизонтальных каналов инерциальной навигационной системы соединены с первыми входами четвертых сумматоров, вторые входы которых соединены с выходами фильтров управления, а выходы четвертых сумматоров соединены со входами блока вычисления навигационных параметров и с первыми входами первых сумматоров, вторые входы которых соединены с выходами по скорости соответствующих горизонтальных каналов приемника спутниковой навигационной системы, выходы фильтров коррекции соединены с первыми входами пятых сумматоров, вторые входы которых соединены с выходами по скорости соответствующих горизонтальных каналов приемника спутниковой навигационной системы, а выходы пятых сумматоров соединены со входами вторых интеграторов, выходы которых соединены со вторыми входами третьих сумматоров, первые входы которых соединены с первыми выходами интеграторов с обратной связью, а выходы третьих сумматоров соединены со вторыми входами интеграторов с обратной связью и входами фильтров управления, вторые выходы интеграторов с обратной связью соединены со вторыми входами вторых сумматоров, первые входы которых соединены с выходами четвертых сумматоров, а выходы вторых сумматоров соединены с первыми входами интеграторов с обратной связью.

