Изобретение относится к способу и устройству для распознавания дорожных знаков.
Для того чтобы содействовать водителю транспортного средства в выполнении его задач в дорожном движении, способы для автоматического распознавания дорожных знаков с помощью подходящего выявления обстановки были разработаны в последнее время и выведены на рынок различными производителями оригинальных частей и производителями портативных навигационных устройств.
Портативные навигационные системы обычно, по существу, основаны на сигналах GPS (далее - Galileo) в сочетании с данными карт для того, чтобы обеспечивать водителя информацией касательно дорожных знаков, несколько систем используют съемочные устройства для того, чтобы улучшать распознавание и устойчивость к ошибкам. В противоположность этому сами производители транспортных средств в основном используют съемочные устройства переднего обзора или комбинацию сигналов с данными, которые относятся к текущему состоянию вождения транспортного средства. Комбинация сигналов с навигационными устройствами также предложена в качестве варианта выбора.
Подходы, поддерживаемые в настоящее время, в совокупности имеют различные проблемы.
Прежде всего, в большинстве случаев ограничения и знаки для регулирования маневров обгона за соответственными дорогами были прекращены и больше не являются действительными. Отображение надлежащей информации о дорожном движении поэтому становится, как правило, ненужным после маневров поворота. Более того, съезды, более конкретно на автострадах, имеют связанные ограничения скорости, которые часто встречаются в качестве последовательности максимальных скоростей, уменьшающихся ступенчатым образом. Однако, когда соответственный съезд не используется водителем, отображаются неправильные ограничения скорости.
Вышеописанные проблемы более или менее резко выражены в зависимости от концепции, соответственно реализованной в конкретном случае. Упомянутые проблемы должны рассматриваться, в частности, в этом случае, когда задача состоит в том, чтобы обойтись без комбинации множества устройств определения. С другой стороны, использование только одного устройства определения факторов окружающей среды является предпочтительным с точки зрения себестоимости, а также для того, чтобы увеличивать скорости выявления соответственных систем распознавания дорожных знаков.
Из EP 1327969 B1 известно моторное транспортное средство, имеющее средство распознавания дорожных знаков и задача которого состоит в том, чтобы избегать непреднамеренной интерпретации в качестве дорожного знака знака, который расположен на другом моторном транспортном средстве. Для этого средство обработки и оценки сконструировано в случае моторного транспортного средства таким образом, чтобы знак, который имеет сходство с дорожным знаком и расположен на другом движущемся моторном транспортном средстве или неподвижном моторном транспортном средстве, показанном в записанном изображении, и который не имеет содержания, которое должно рассматриваться в ходе применения управления или регулирования, выполняемых с помощью средства обработки и оценки, не принимался во внимание в ходе управления или регулирования.
В EP 2023265 A1 раскрыт способ для предсказания ожидаемого размера изображения неподвижного объекта, приписываемого проезжей части дороги, такого как дорожный знак, например вычислительные издержки сокращаются и/или увеличивается устойчивость распознавания к ошибкам.
Кроме того, известны способы и устройства для распознавания дорожных знаков, например, из DE 29610677 U1, DE 29802953 U1, DE 19736774 A1, DE 3619824 A1 и DE 19829162 A1.
Несмотря на то, что распознавание дорожных знаков посредством камеры или с помощью навигационных устройств является относительно сложившимся, на сегодняшний день нет известной подходящей логики фильтрации и скрытия для решения вышеописанных проблем.
Задача изобретения состоит в том, чтобы предложить способ и устройство для распознавания дорожных знаков, которые улучшают предоставление информации водителю и учитывают вышеописанные проблемы.
Эта задача достигается способом в соответствии с признаками независимого п. 1 формулы изобретения и устройством в соответствии с признаками п. 8 формулы изобретения.
Обладающий признаками изобретения способ распознавания дорожных знаков в моторном транспортном средстве, присутствующих в окрестности моторного транспортного средства, которые выявляются и отображаются водителю в моторном транспортном средстве, включает следующие этапы:
определение на основе предписанного критерия, действителен ли выявленный дорожный знак для текущей ситуации вождения моторного транспортного средства; и
скрытие или отображение этого дорожного знака в качестве функции результата этого определения.
Изобретение, в частности, основано на концепции отклонения и/или скрытия распознанных дорожных знаков в качестве функции поведения водителя и информации о полосе движения, возможности добиваться высокого покрытия дорожных знаков в окружающей среде транспортного средства (в смысле большого расстояния или дальности вождения, для которых еще отображается информация о дорожных знаках), а также высокой скорости выявления (в смысле большого расстояния или дальности вождения с правильно отображаемой информацией о дорожных знаках). В частности, реализовано полезное и хорошо развитое применение функциональных возможностей камеры с функциональной хитростью, а также информации датчиков транспортного средства, в частности, для того, чтобы соотносить режим вождения с распознанными и/или отображенными дорожными знаками, а также, если уместно, с имеющейся в распоряжении информацией касательно условий полосы движения.
В соответствии с одним из вариантов осуществления вероятность действительности дорожного знака определяется в качестве функции информации о дорожном знаке и информации о ситуации вождения в способе. В этом случае информация о дорожном знаке может иметь по меньшей мере один параметр из группы, содержащей тип дорожного знака, предельное значение, предписанное дорожным знаком, положение дорожного знака и ограничение дорожного знака, которое определено дополнительными знаками. Информация о ситуации вождения может иметь по меньшей мере один параметр из группы, содержащей скорость движения, скорость рыскания, угол поворота рулевого колеса, состояние отображения направления движения и покрытые расстояние или маршрут.
В дополнение вероятность действительности дорожного знака может дополнительно определяться на этапе a) на основе специфичной полосе движения информации.
В этом случае в соответствии с одним из вариантов осуществления специфичная полосе движения информация специфична началу съезда с автострады и/или окончанию съезда с автострады. В дополнение специфичная полосе движения информация может быть специфичной для выполнения смены полосы движения.
Изобретение также относится к устройству распознавания дорожных знаков в моторном транспортном средстве, которое выполнено с возможностью осуществления способа, имеющего вышеописанные признаки.
Дополнительные усовершенствования изобретения должны выводиться из описания и зависимых пунктов формулы изобретения.
Изобретение пояснено ниже с помощью предпочтительного варианта осуществления и со ссылкой на прилагаемые чертежи.
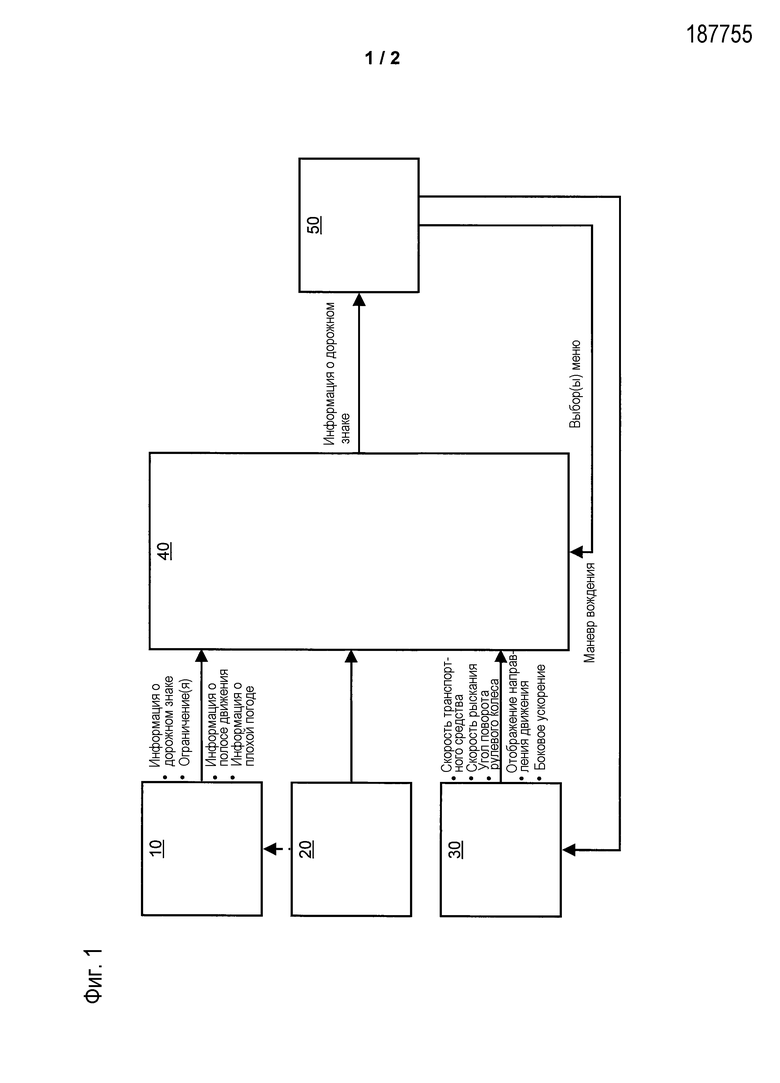
Фиг.1 показывает структурную схему для пояснения конструкции и функционирования обладающего признаками изобретения устройства; и
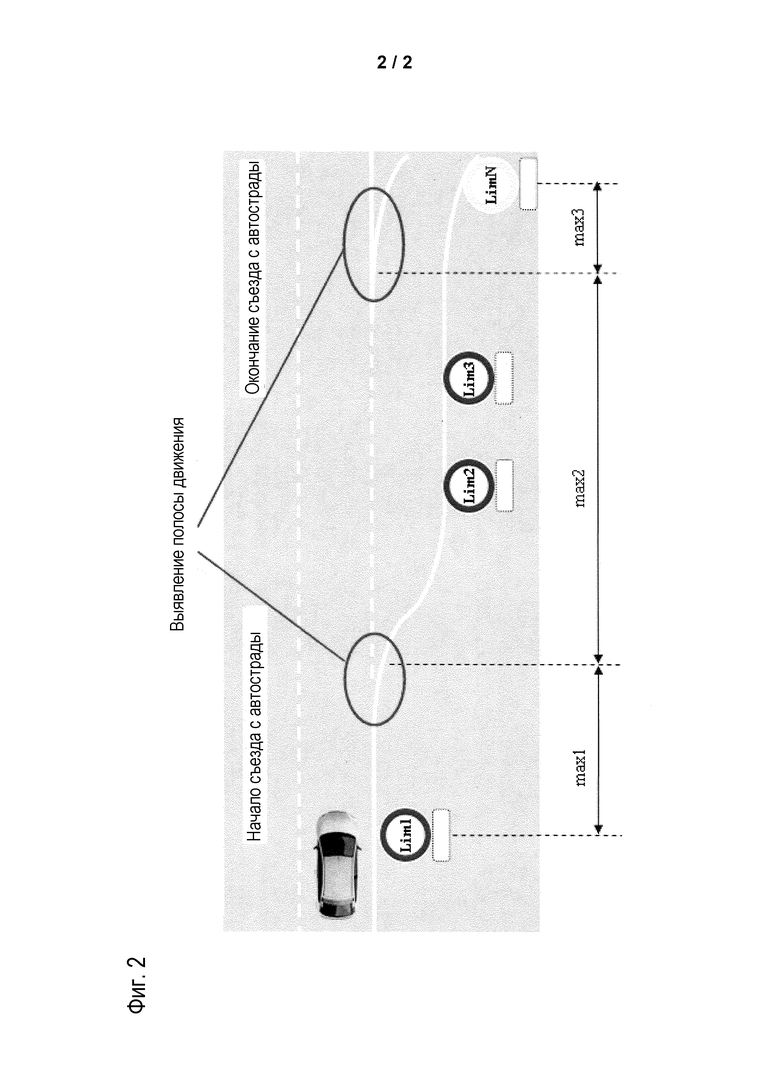
фиг.2 - схема съезда с автострады для иллюстрации примера применения изобретения.
Только в качестве примера (и без ограничения им изобретения) ниже сделана ссылка на подгруппу дорожных знаков, более конкретно ограничения скорости, всякий раз, когда соответствует информации, относящейся к специфичным ограничениям.
В частности, изобретение определяет логику скрытия, которая определяет в соответствии со следующим уравнением (1) вероятность, что выявленные дорожные знаки действительны для текущей ситуации, это является зависящим от самих ситуации вождения (DS) и распознанного дорожного знака (= TSn), например игнорирование дорожных знаков на съездах:

Выявленный дорожный знак может приниматься или отклоняться в зависимости от определенной вероятности. В некоторых случаях отображенный дорожный знак, который не может быть немедленно отклонен, отбрасывается в зависимости от дополнительных условий, таких как ситуации съезда.
В соответствии со следующим уравнением (2) информация о дорожном знаке может содержать данные, относящиеся к типу (= T) дорожного знака, значению ограничения (= V), предписанному дорожным знаком, и положению (= P) дорожного знака. Возможные ограничения (= q), которые типично описаны в виде дополнительных знаков, могут быть предусмотрены на соответственном дорожном знаке. Ограничивающие дорожные знаки, например, такие как стрелки полос движения съезда, используются для того, чтобы точнее определять значение вероятности.

В соответствии со следующим уравнением (3) информация, которая относится к транспортному средству, содержащему в себе систему, может содержать скорость движения (= v), скорость рыскания (= Y), угол поворота рулевого колеса (= SWA), состояние отображения направления движения (= TI) и пройденное расстояние или маршрут (= x).

В дополнение можно использовать специфичные полосе движения данные, которые включают в себя дополнительные признаки в виде информации о полосе движения (= LI). Используются начало съезда с автострады (ERS) и окончание съезда с автострады (ERE), а также информация о смене полосы движения, которые обычно имеются в распоряжении из алгоритмов предупреждения об уходе с полосы движения, которые работают в камере переднего обзора. Камера дополнительно должна поставлять информацию, относящуюся к типу дорожного движения (правостороннее дорожное движение/ левостороннее дорожное движение) посредством алгоритма оценки типа дорожного движения (TSE), если этих данных нет в распоряжении на шине транспортного средства.
В соответствии с фиг.1, обладающее признаками изобретения устройство для дорожного знака прежде всего использует переднюю камеру 10 для выявления информации о дорожном знаке (TSn), в том числе любых ограничений, относящихся к дорожному знаку, которые типично предписаны в виде дополнительных знаков, и также выявляет информацию, относящуюся к окрестности 20 транспортного средства (такую как информация о полосе движения и информация о погоде). Вместе с информацией 30 о ситуации вождения (которая зависит от маневров вождения, выполняемых водителем 50, и, например, содержит скорость v движения, скорость Y рыскания, угол SWA поворота рулевого колеса, состояние отображения направления движения (TI) и покрытые расстояние или маршрут x) подается в блок 40 для оценки вероятности действительности соответствующего дорожного знака, какой блок 40 принимает решение, отображается ли соответствующий дорожный знак водителю 50 или скрывается.
Следующие функциональные возможности могут быть реализованы в одном из примерных вариантов осуществления изобретения, делается ссылка на фиг.2 для иллюстрации.
В соответствии с одним из вариантов осуществления, знаки ограничения скорости могут интерпретироваться указывающими ссылкой на съезд с автострады, когда удовлетворены следующие условия (переменные, названные впоследствии, проиллюстрированы на фиг.2):
все ограничения скорости расположены на правой стороне (в случае правостороннего дорожного движения; обратное справедливо для левостороннего движения);
первое необязательное ограничение скорости (= Lim1) перед началом съезда с автострады (= ERS) отдалено не более чем на max1 от этого начала съезда с автострады;
максимальное расстояние между началом съезда с автострады (= ERS) и окончанием съезда с автострады (= ERE): max2; и
последнее необязательное ограничение скорости (= LimN) после окончания съезда с автострады (= ERE) отдалено не более чем на max3.
Устройство распознавания дорожных знаков (модуль TSR, TSR= «Traffic Sign Recognition») должно скрывать все ограничения скорости, имеющие отношение к съезду с автострады,
когда не было поворота на съезд с автострады, то есть когда транспортное средство не меняет полосу движения; или
когда транспортное средство предпринимает смену полосы движения влево.
Ограничения скорости обрабатываются как обычно, коль скоро транспортное средство не повернуло на съезд с автострады, и выявляются другие знаки скорости, более конкретно
только на левой стороне в качестве ограничения скорости; или
по обеим сторонам в качестве ограничения скорости.
Устройство распознавания дорожных знаков должно отображать знак ограничения скорости, указывающий ссылкой на съезд с автострады, который был пройден последним, как только был поворот на съезд с автострады, более точно
когда транспортное средство предпринимает смену полосы движения вправо; или
когда водитель приводит в действие сигнал поворота направления движения вправо.
Как только был выполнен поворот на съезд с автострады, все последующие дорожные знаки обрабатываются как обычно.
В заключение устройство распознавания дорожных знаков может отбрасывать знаки ограничения скорости, указывающие ссылкой на съезд с автострады, как только было пройдено окончание съезда с автострады (= ERE).
Когда никакого окончания съезда с автострады (= ERE) не было обнаружено (например, модулем выявления полосы движения или предупреждением об уходе с полосы движения) в пределах определенного расстояния max2, последние распознанные дорожные знаки отображаются водителю в соответствии с обычным правилом.
В соответствии с дополнительным аспектом также можно скрывать ограничения скорости, которые в высшей степени невероятны для специфичных скоростей. Например, когда устройство формирования изображений выявляет ограничение скорости 30 км/ч, в то время как транспортное средство ведется на скорости 110 км/ч, отображение ограничения скорости 30 км/ч может скрываться вследствие высокой разностной скорости.
Изобретение относится к способу и устройству распознавания дорожных знаков, присутствующих в окрестности моторного транспортного средства, которые выявляются и отображаются водителю в моторном транспортном средстве. Способ имеет следующие этапы: определение на основе предписанного критерия, действителен ли один из выявленных дорожных знаков для текущей ситуации вождения моторного транспортного средства, и скрытие или отображение этого дорожного знака в качестве функции результата этого определения. Достигается улучшение предоставления информации водителю. 2 н. и 6 з.п. ф-лы, 2 ил.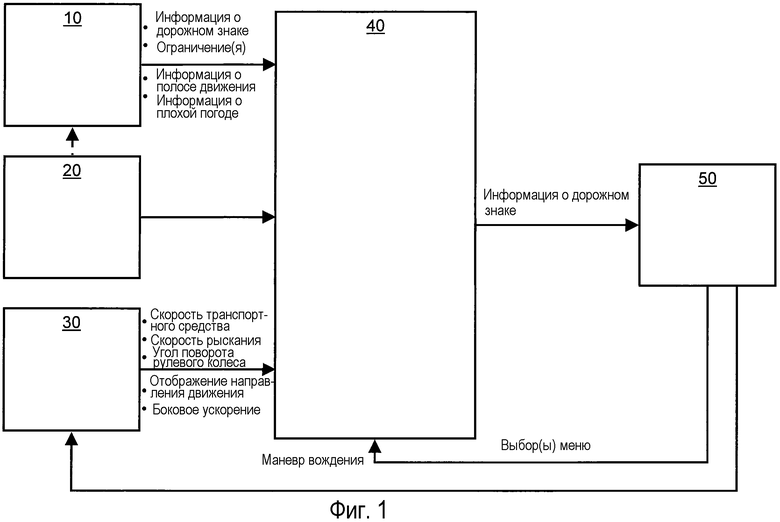
1. Способ распознавания дорожных знаков в моторном транспортном средстве, присутствующих в окрестности моторного транспортного средства, которые выявляются и отображаются водителю в моторном транспортном средстве, включающий следующие этапы, на которых:
a) определяют на основе предписанного критерия, действителен ли выявленный дорожный знак для текущей ситуации вождения моторного транспортного средства; и
b) скрывают или отображают этот дорожный знак в качестве функции результата этого определения.
2. Способ по п.1, в котором вероятность действительности дорожного знака определяется на этапе a) в качестве функции информации о дорожном знаке (TSn) и информации о ситуации вождения (DS).
3. Способ по п.2, в котором информация о дорожном знаке (TSn) имеет по меньшей мере один параметр из группы, содержащей тип (T) дорожного знака, предельное значение (V), предписанное дорожным знаком, положение (P) дорожного знака и ограничение (q) дорожного знака, которое определяется дополнительными знаками.
4. Способ по п.2 или 3, в котором информация о ситуации вождения (DS) имеет по меньшей мере один параметр из группы, содержащей скорость (v) движения, скорость (Y) рыскания, угол (SWA) поворота рулевого колеса, состояние отображения направления движения (TI) или пройденное расстояние или маршрут (x).
5. Способ по п.2, в котором вероятность действительности дорожного знака дополнительно определяется на этапе a) на основе специфичной полосе движения информации (FI).
6. Способ по п.5, в котором специфичная полосе движения информация (FI) специфична началу (ERS) съезда с автострады или окончанию (ERE) съезда с автострады.
7. Способ по п.5 или 6, в котором специфичная полосе движения информация (FI) специфична выполнению смены полосы движения.
8. Устройство распознавания дорожных знаков в моторном транспортном средстве, которое выполнено с возможностью выявления дорожных знаков, присутствующих в окрестности моторного транспортного средства, и отображения указанных дорожных знаков водителю в моторном транспортном средстве, при этом устройство выполнено с возможностью осуществления способа по любому из пп.1-7.
| Укладчик торфяных кирпичей | 1955 |
|
SU103418A1 |
| US 2011109476 A1, 12.05.2011 | |||
| US 2009312888 A1, 17.12.2009. | |||

