Область техники
[0001] Настоящее раскрытие относится к способу и устройству для коррекции ошибки положения транспортного средства с поддержкой вождения, с помощью которых исправляется ошибка, возникающая между положением рассматриваемого транспортного средства и целевым маршрутом во время поездки с поддержкой вождения.
Описание предшествующего уровня техники
[0002] Традиционно, в ситуациях, когда обнаруживается переопределение рулевого управления, а затем обнаруживается отмена переопределенного рулевого управления во время управления автономным движением или другим движением, предполагается, что водитель возвратил рассматриваемое транспортное средство на маршрут поездки, установленный в центре белых линий. Одно известное устройство для оценки положения рассматриваемого транспортного средства предполагает, что положение, при котором заканчивается переопределение рулевого управления, находится внутри полосы движения, и корректирует собственное положение рассматриваемого транспортного средства на величину расхождения GPS/карты (например, см. Патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
Патентный документ 1: Опубликованная заявка на патент Японии №. 2017-13586
Раскрытие изобретения
Проблемы, решаемые изобретением
[0004] Однако, с помощью этого обычного устройства корректируется собственное положение рассматриваемого транспортного средства, и поэтому любая применяемая коррекция должна учитывать все блоки, использующие информацию об автономном положении, и коррекция, которая фокусируется на управляемости транспортного средства, не может быть выполнена. Другими словами, поскольку коррекция собственного положения рассматриваемого транспортного средства обычно отдает приоритет "невыезду/не столкновению", иногда выполняются большие коррективы в управлении транспортным средством, а "плавность хода" приносится в жертву.
[0005] Настоящее раскрытие сфокусировано на вышеупомянутой проблеме, поскольку целью настоящего изобретения является предоставление возможности выбора приоритета плавности хода или приоритета невыезда, в зависимости от сценария, и достижения управления транспортным средством, когда можно чувствовать себя более непринужденно.
Средства, используемые для решения вышеперечисленных проблем
[0006] Для достижения вышеуказанной цели в настоящем раскрытии предусмотрен контроллер, который исправляет ошибку, возникающую между положением рассматриваемого транспортного средства и целевым маршрутом во время поездки с поддержкой вождения.
В способе коррекции ошибки положения транспортного средства с поддержкой вождения обнаруживается граница полосы движения, по которой перемещается рассматриваемое транспортное средство.
Сравниваются взаимные расположения между границей полосы движения, которая была обнаружена, и целевым маршрутом на карте, и в ситуациях, когда целевой маршрут находится в пределах предписанного расстояния от границы полосы движения, или в ситуациях, когда целевой маршрут находится на противоположной стороне границы полосы движения от рассматриваемого транспортного средства, целевой маршрут корректируется на величину перемещения в сторону в поперечном направлении.
Эффект от изобретения:
[0007] Посредством коррекции целевого маршрута с движением в сторону, а не коррекцией собственного положения рассматриваемого транспортного средства, как описано выше, можно выбрать, следует ли отдавать приоритет плавности хода или нет, в зависимости от сценария, и может быть достигнуто управление транспортным средством, когда можно чувствовать себя более непринужденно.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг. 1 – общая схема системы, иллюстрирующая систему автономного управления вождением, в которой были применены способ и устройство для коррекции ошибки положения по первому варианту осуществления.
Фиг. 2 - представляет собой вид в перспективе, иллюстрирующий, среди бортовых датчиков, левую камеру распознавания и правую камеру распознавания по первому варианту осуществления.
Фиг. 3 - представляет собой вид в перспективе, иллюстрирующий, среди бортовых датчиков, лидар, предусмотренный в левом и правом положениях в передней части транспортного средства для первого варианта осуществления.
Фиг. 4 - является общей блок-схемой, иллюстрирующей корректор целевого маршрута блока управления навигацией первого варианта осуществления.
Фиг. 5 - является подробной блок-схемой, иллюстрирующей блок консолидации информации о границе дороги в корректоре целевого маршрута, показанном на фиг. 4.
Фиг. 6 - является подробной блок-схемой, иллюстрирующей блок медиации в блоке консолидации информации о границе дороги, показанном на фиг. 5.
Фиг. 7 - является подробной блок-схемой, иллюстрирующей блок вычисления величины поперечной коррекции в корректоре целевого маршрута, показанном на фиг.4.
Фиг. 8 - это пояснительная схема, иллюстрирующая операцию коррекции целевого маршрута, выполняемую корректором целевого маршрута в блоке управления навигацией.
Фиг. 9 - это пояснительная схема, сравнивающая управляемость транспортного средства в сравнительном примере и управляемость транспортного средства в первом варианте осуществления при входе в узкую полосу в операции коррекции целевого маршрута.
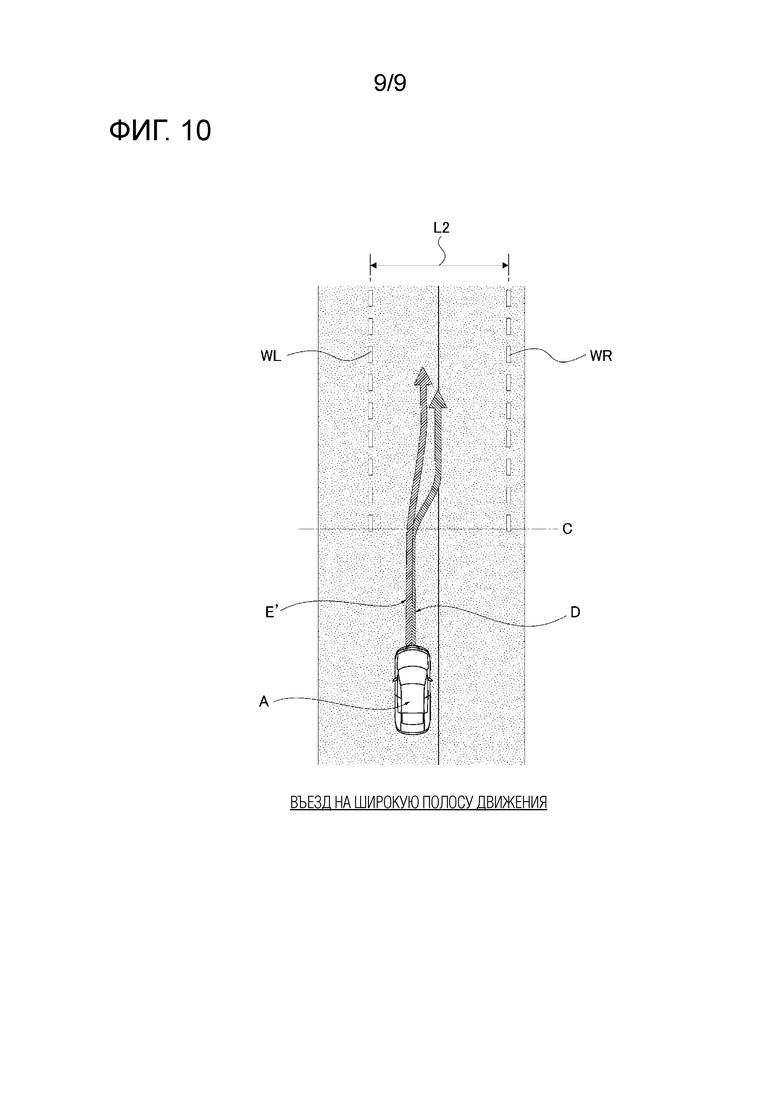
Фиг. 10 - это пояснительная схема, сравнивающая управляемость транспортного средства в сравнительном примере и управляемость транспортного средства в первом варианте осуществления при входе в широкую полосу в операции коррекции целевого маршрута.
Предпочтительные варианты осуществления изобретения
[0009] Предпочтительный вариант осуществления для реализации способа и устройства для коррекции ошибки положения транспортного средства с поддержкой вождения согласно настоящему раскрытию будет описан ниже со ссылкой на первый вариант осуществления, проиллюстрированный на чертежах.
Первый вариант
[0010] Сначала будет описана конфигурация. Способ и устройство для генерации целевого способа и устройства для коррекции ошибки положения для первого воплощения применяются к автономному транспортному средству (один пример транспортного средства с поддержкой вождения), в котором рулевое управление/узел привода/торможение автоматически контролируется в соответствии с выбором автономного режима вождения с использованием информации о маршруте, генерируемой блоком управления навигацией. Конфигурация первого воплощения будет описана под заголовками "Общая конфигурация системы", "Подробная конфигурация блока управления навигацией" и "Общая конфигурация корректора целевого маршрута", "Подробная конфигурация блока консолидации информации о границе дороги" и "Подробная конфигурация блока вычисления величины поперечной коррекции".
[0011] [Общая конфигурация системы]
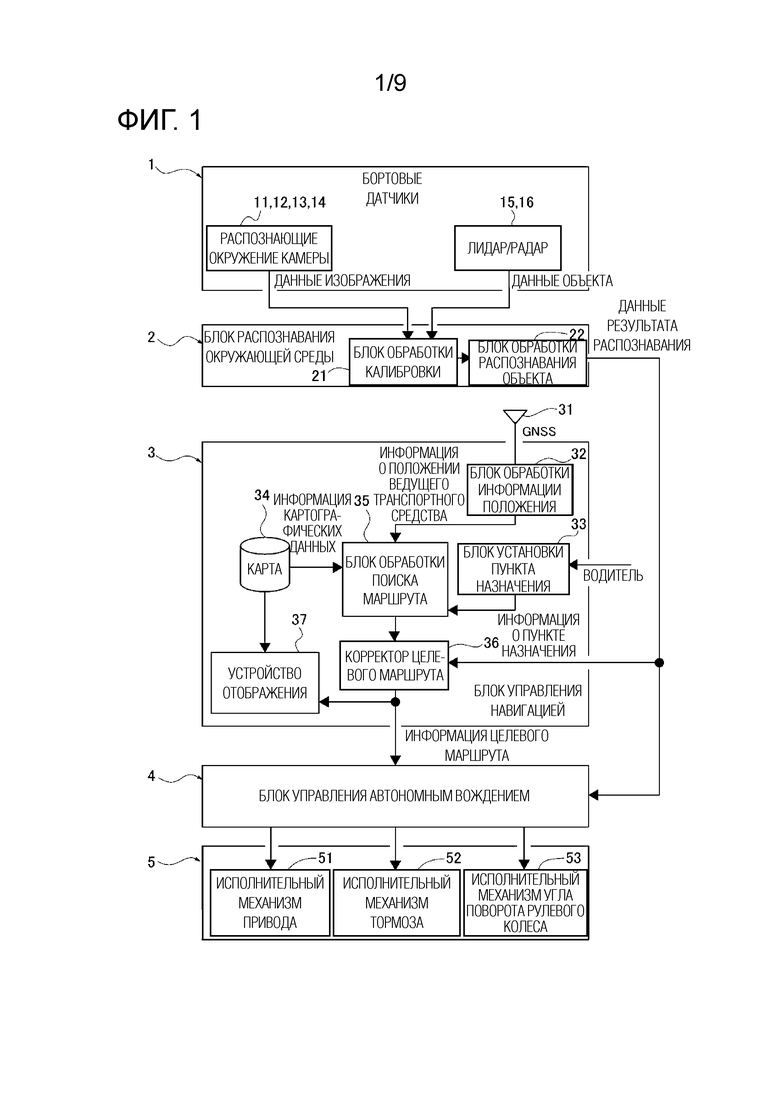
Фиг. 1 иллюстрирует систему автономного управления вождением, в которой были применены способ и устройство для коррекции ошибки положения по первому варианту осуществления. Фиг. 2 иллюстрирует, среди бортовых датчиков, левую камеру распознавания и правую камеру распознавания. Фиг. 3 иллюстрирует, среди бортовых датчиков, лидар, установленный в левом и правом положениях спереди транспортного средства. Общая конфигурация системы будет описана ниже со ссылкой на фиг. 1-3.
[0012] Как показано на фиг. 1, система автономного управления вождением содержит бортовые датчики 1, блок распознавания окружающей среды 2, блок управления навигацией 3, блок 4 автономного управления вождением, и исполнительный механизмы 5. Блок 2 распознавания окружающей среды, блок 3 управления навигацией и блок 4 управления автономным вождением представляют собой компьютеры, которые содержат центральный процессор или другой процессор и выполняют арифметическую обработку.
[0013] Бортовые датчики 1 являются датчиками, которые устанавливаются на автономном транспортном средстве и получают информацию об окружении транспортного средства. Бортовые датчики 1 включают в себя переднюю камеру распознавания 11, заднюю камеру распознавания 12, правую камеру распознавания 13, левую камеру распознавания 14, лидар 15 и радар 16. Бортовые датчики 1 включают в себя, как датчики, которые собирают информацию, необходимую для автономного управления вождением, кроме информации об окружении рассматриваемого транспортного средства, датчик скорости транспортного средства, датчик скорости рысканья, переключатель сигнала поворота и т.д. (ни один из которых не проиллюстрирован).
[0014] В сочетании, передняя камера распознавания 11, задняя камера распознавания 12, правая камера распознавания 13 и левая камера распознавания 14 конфигурируют камеру, распознавания окружения (вокруг монитора обзора (AVM)). Камера распознавания окружения обнаруживает препятствия на пути поездки рассматриваемого транспортного средства, препятствия, которые находятся вне пути поездки рассматриваемого транспортного средства (дорожные конструкции, предшествующие транспортные средства, следующие транспортные средства, встречные транспортные средства, периферийные транспортные средства, пешеходы, велосипеды и мотоциклы), путь поездки рассматриваемого транспортного средства (белые линии на дороге, границы дороги, линии остановки, пешеходные переходы), дорожные знаки (пределы ограничения скорости) и т. д.
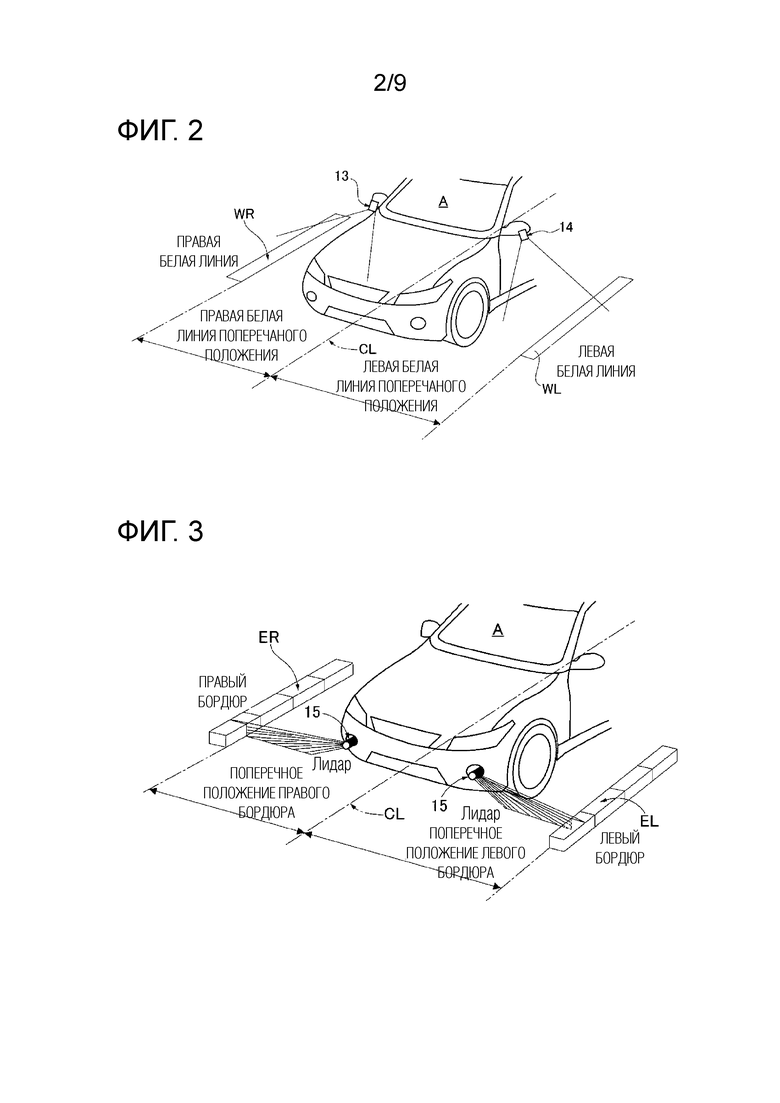
[0015] Как показано на фиг. 2, правая камера распознавания 13 представляет собой камеру с рыбьим глазом, которая встроена в зеркало правой двери. Правая камера распознавания 13 имеет функцию обнаружения поперечного положения правой белой линии. [0015] Как показано на фиг. 2, правая камера распознавания 13 представляет собой камеру с рыбьим глазом, которая встроена в зеркало правой двери. Правая камера распознавания 13 имеет функцию обнаружения поперечного положения правой белой линии.
Поперечное положение правой белой линии относится к длине до положения внутреннего края правой белой линии WR от положения центральной линии CL направления ширины транспортного средства рассматриваемого транспортного средства А. Поперечное положение левой белой поперечной линии относится к длине до положения внутреннего края левой белой линии WL из положения центральной линии CL направления ширины транспортного средства рассматриваемого транспортного средства A.
[0016] Лидар 15 и радар 16 расположены в положениях на переднем конце рассматриваемого транспортного средства, причем их оси освещения выходной волны направлены впереди транспортного средства. Получая волны, которые отражаются назад, лидар 15 и радар 16 обнаруживают наличие объектов перед рассматриваемым транспортным средством и расстояния до объектов перед рассматриваемым транспортным средством. Лидар 15 и радар 16, которые представляют собой два типа диапазонных датчиков, объединяются для конфигурации лидара/радара, и, например, лазерный радар, миллиметровый волновой радар, ультразвуковой радар, лазерный дальномер и т.д., могут быть использованы для этого. Лидар 15 и радар 16 обнаруживают положения и расстояния до объектов, включая объекты на пути поездки рассматриваемого транспортного средства, а также объекты вне траектории движения рассматриваемого транспортного средства (дорожные сооружения, предшествующие транспортные средства, последующие транспортные средства, встречные транспортные средства, соседние транспортные средства, пешеходы, велосипеды, мотоциклы).
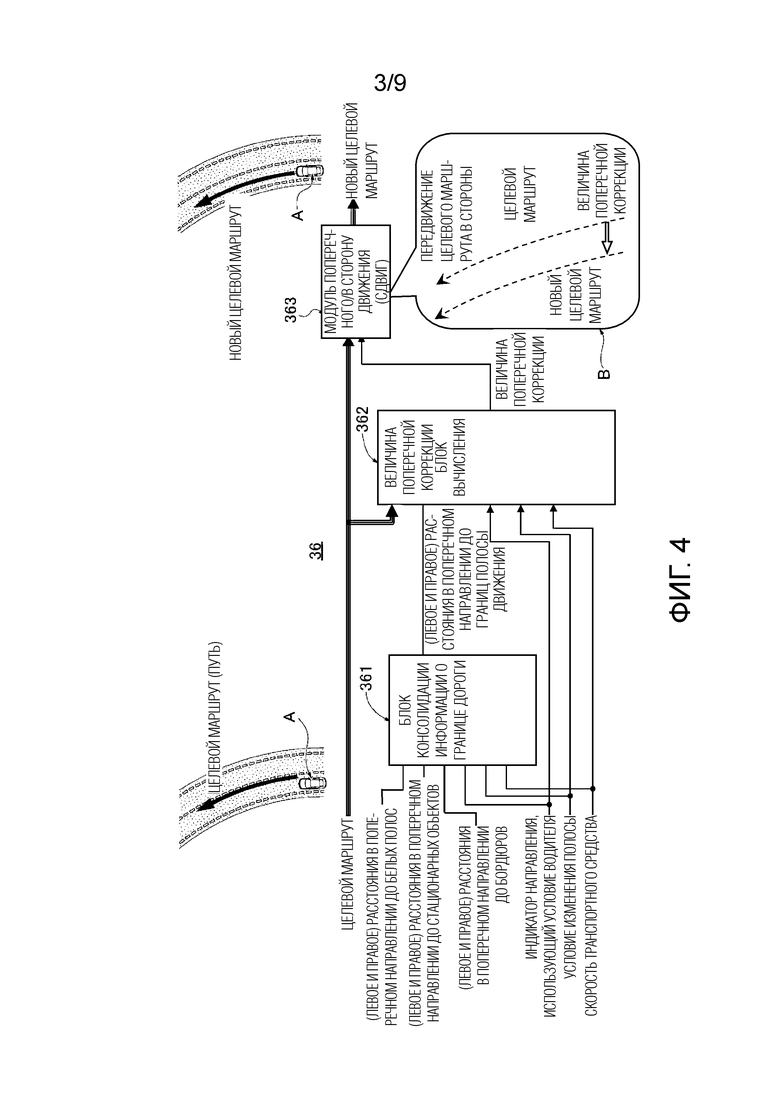
[0017] Как показано на фиг. 3, лидар 15 выполнен с возможностью качания в левом и правом положениях на переднем конце рассматриваемого транспортного средства A, направленном наклонно вниз и вправо и направленном наклонно вниз и влево. Лидар 15 имеет функцию обнаружения поперечного положения правого бордюра и функцию обнаружения поперечного положения левого бордюра. Поперечное положение правого бордюра относится к длине до положения внутреннего края правого бордюра ER от положения центральной линии CL направления ширины транспортного средства рассматриваемого транспортного средства А. Поперечное положение левого бордюра относится к длине до положения внутреннего края левого бордюра EL из положения центральной линии CL направления ширины транспортного средства рассматриваемого транспортного средства A.
[0018] Блок распознавания окружающей среды 2 получает, как входные данные, данные изображения с камер распознавания 11, 12, 13, 14 и данные об объектах с лидара/радара 15, 16. Блок 2 распознавания окружающей среды включает в себя блок обработки калибровки 21, который генерирует данные калибровки для данных изображений и объектов, и блок обработки распознавания объектов 22, который выполняет обработку распознавания объектов на основе калибровочных данных.
[0019] Блок 21 обработки калибровки оценивает параметр данных изображения с камер распознавания 11, 12, 13, 14 и параметр для данных объекта с лидара/радара 15, 16, и использует эти параметры для генерации и вывода данных изображения и данных калибровки данных объекта. Например, в случае данных изображения с камер распознавания 11, 12, 13, 14 блок 21 обработки калибровки использует параметры для выполнения коррекции и т.д., оптических осей и искажения объектива.
[0020] Блок обработки распознавания объектов 22 получает, как входные данные, калибровочные данные от блока обработки калибровки 21, выполняет обработку распознавания объекта на основе данных калибровки и выводит данные результата распознавания. Блок 22 обработки распознавания объекта, например, выполняет обработку, сравнивая данные изображения и данные объекта, и когда с помощью данных объекта подтверждается, что объект присутствует в положении для кандидата на объект, что основано на данных изображения, блок 22 обработки распознавания объекта распознает, что объект присутствует, и распознает, что это за объект.
[0021] Блок управления навигацией 3 получает, как входные данные, информацию о положении транспортного средства с антенны GNSS 31, сочетает в себе GPS (глобальная система позиционирования), используя спутниковую связь с картографическими данными, включая дорожную информацию, и генерирует целевой маршрут к пункту назначения из текущего положения с помощью поиска маршрута. В дополнение к отображению генерируемых целевых маршрутов на карте, и блок управления навигацией 3 выводит информацию о целевом маршруте.
[0022] «GNSS» является сокращением от «глобальной навигационной спутниковой системы», а «GPS» — «глобальной системой позиционирования». Подробная конфигурация блока управления навигацией 3 будет описана ниже.
[0023] Блок 4 управления автономным вождением принимает, в качестве входных данных, данные результата распознавания из блока 22 обработки распознавания объектов из блока 2 распознавания окружающей среды и информацию о целевом маршруте из блока 3 управления навигацией. Автономный блок управления управлением 4 генерирует целевые скорости транспортного средства, целевые темпы ускорения и целевые темпы замедления на основе входной информации. Блок 4 управления автономным вождением получает значения команды управления вождением, используя целевую скорость ускорения, которая была сгенерирована, и выводит результат этого вывода в исполнительный механизм 51 привода. Блок 4 управления автономным вождением получает значения команды управления тормозом, используя целевую скорость замедления, которая была сгенерирована, и выводит результат в исполнительный механизм 52 тормоза. Блок 4 управления автономным вождением получает значения команды управления рулевым управлением, используя введенную в него информацию о целевом маршруте, и выводит результат в исполнительный механизм 53 рулевого управления.
[0024] Исполнительные механизмы 5 включают в себя исполнительный механизм 51 привода, исполнительный механизм 52 управления тормозом и исполнительный механизм 53 рулевого управления.
[0025] Исполнительный механизм 51 привода принимает, в качестве входных данных, значение команды управления приводом от блока 4 управления автономным вождением и управляет усилием привода от источника привода. Другими словами, в случае транспортного средства с двигателем, исполнительный механизм 51 привода является исполнительным механизмом двигателя. В случае гибридного транспортного средства исполнительный механизм 51 привода является исполнительным механизмом двигателя (внутреннего сгорания) и исполнительным механизмом электродвигателя. В случае электрического транспортного средства исполнительный механизм 51 привода является исполнительным механизмом электродвигателя.
[0026] Исполнительный механизм 52 тормоза принимает в качестве входных данных, значение команды управления тормозом от блока 4 управления автономным вождением и управляет тормозной силой тормозов. Гидравлический усилитель, электрический усилитель и т.д., используется в качестве исполнительного механизма 52 тормоза.
[0027] Исполнительный механизм 53 рулевого управления принимает, в качестве входных данных, значение команды управления рулевым управлением от блока 4 управления автономным вождением и управляет углом поворота рулевого колеса. Электродвигатель управления углом поворота рулевого колеса и т.д. используется в качестве исполнительного механизма 53 угла поворота рулевого колеса.
[0028] «Подробная конфигурация блока управления навигацией»
Подробная конфигурация блока 3 управления навигацией, которая устанавливает пункт назначения, получает оптимальный целевой маршрут и отображает целевой маршрут автономного вождения, будет описана ниже со ссылкой на фиг. 1.
[0029] Как показано на фиг. 1, блок 3 управления навигацией содержит антенну GNSS 31, блок 32 обработки информации положения, блок 33 установки пункта назначения, блок 34 хранения данных карт, блок 35 обработки поиска маршрута, корректор 36 целевого маршрута, и устройство 37 отображения.
[0030] Блок 32 обработки информации положения выполняет обработку для обнаружения широты и долготы положений остановки рассматриваемого транспортного средства и положений перемещения рассматриваемого транспортного средства на основе информации спутниковой связи, введенной от антенны 31 GNSS. Информация о положении рассматриваемого транспортного средства из блока 32 обработки информации положения выводится в блок 35 обработки поиска маршрута.
[0031] Пункт назначения для рассматриваемого транспортного средства вводится и устанавливается в блок 33 установки пункта назначения посредством, среди прочего, операции сенсорной панели на экране дисплея устройства 37 дисплея водителем. Информация о пункте назначения из блока 33 установки пункта назначения выводится в блок 35 обработки поиска маршрута.
[0032] Блок 34 хранения картографических данных является блоком хранения так называемых цифровых картографических данных, с которыми связаны широта / долгота и картографическая информация. Данные карты включают в себя информацию о дороге, которая ассоциирована с соответствующими точками. Информация о дороге определяется узлами и звеньями, соединяющими узлы вместе. Информация о дороге включает в себя информацию, которая определяет дороги в соответствии с положением/областью дороги, и информацию, указывающую тип каждой дороги, ширину каждой дороги и геометрию дороги. Положение перекрестков, направления приближения перекрестков, тип перекрестка и другая информация, относящаяся к перекресткам, хранятся вместе с соответствующей идентификационной информацией для каждой дорожной связи в дорожной информации о дороге. Тип дороги, ширина дороги, геометрия дороги, разрешено ли движение вперед, взаимосвязи с полосой движения, разрешен ли проезд (разрешен ли въезд на соседнюю полосу движения), ограничение скорости и другая информация, касающаяся дорог, также хранятся вместе с соответствующей идентификационной информацией для каждой дорожной ссылки в информации о дороге.
[0033] Блок 35 обработки поиска маршрута принимает, в качестве входных данных, информацию о положении рассматриваемого транспортного средства из блока 32 обработки информации положения, информацию о пункте назначения из блока 33 установки пункта назначения и информацию о карте дороги (данные карты дороги) из блока 34 хранения данных карты. Блок 35 обработки поиска маршрута генерирует целевой маршрут, выполняя вычисление стоимости маршрута и т.д., на основе информации о карте дороги. GPS и карта могут быть использованы для создания целевого маршрута. В качестве альтернативы, вместо использования GPS и карты, когда присутствует головное транспортное средство, в качестве целевого маршрута может использоваться траектория движения головного транспортного средства. В таком случае, когда точность позиционирования GPS низкая, использование этой траектории поездки уменьшает величину перемещения в сторону с помощью корректора 36 целевого маршрута, описанного ниже, и управляемость транспортного средства может иметь более плавный ход.
[0034] Корректор 36 целевого маршрута принимает в качестве входных данных данные результата распознавания из блока 22 обработки распознавания объекта и целевой маршрут из блока 35 обработки поиска маршрута. В дополнение к целевому маршруту корректор 36 целевого маршрута получает, в качестве входных данных, (левое и правое) расстояния в поперечном направлении до белых линий, (левое и правое) расстояния в поперечном направлении до стационарных объектов, (левое и правое) расстояния в поперечном направлении до бордюров, указатель поворота (сигнал поворота), используемый водителем, условие смены полосы движения и информацию, такую как скорость транспортного средства. Корректор 36 целевого маршрута определяет границы полосы движения, по которой перемещается рассматриваемое транспортное средство, на основе этой входной информации. Корректор 36 целевого маршрута сравнивает взаимные расположения между границами полосы движения, которые была обнаружены, и целевым маршрутом на карте, и в ситуациях, когда целевой маршрут находится в пределах предписанного расстояния от границы полосы движения, или в ситуациях, когда целевой маршрут находится на противоположной стороне границы полосы движения от рассматриваемого транспортного средства, целевой маршрут корректируется с перемещением в сторону в поперечном направлении.
[0035] «Предписанное расстояние» относится к расстоянию, на котором водитель будет испытывать чувство неловкости, когда рассматриваемое транспортное средство приближается к границе полосы движения. Например, когда расстояние от центральной линии направления ширины транспортного средства рассматриваемого транспортного средства до границы полосы движения составляет приблизительно 2 м (когда расстояние от стороны рассматриваемого транспортного средства до границы полосы движения составляет приблизительно 1 м). В ситуациях, когда целевой маршрут находится на противоположной стороне границы полосы движения от рассматриваемого транспортного средства, целевой маршрут корректируется перемещением в сторону в поперечном направлении независимо от расстояния до рассматриваемого транспортного средства.
[0036] Устройство 37 отображения принимает в качестве входных данных информацию картографических данных из блока 34 хранения картографических данных и информацию целевого маршрута от корректора 36 целевого маршрута. Устройство 37 отображения отображает карту, дороги, целевой маршрут, положение рассматриваемого транспортного средства и пункт назначения на экране дисплея. Другими словами, во время автономной поездки устройство 37 отображения предоставляет информацию, визуально представляющую положение рассматриваемого транспортного средства на карте, например, о том, где перемещается рассматриваемое транспортное средство.
[0037] «Общая конфигурация корректора целевого маршрута»
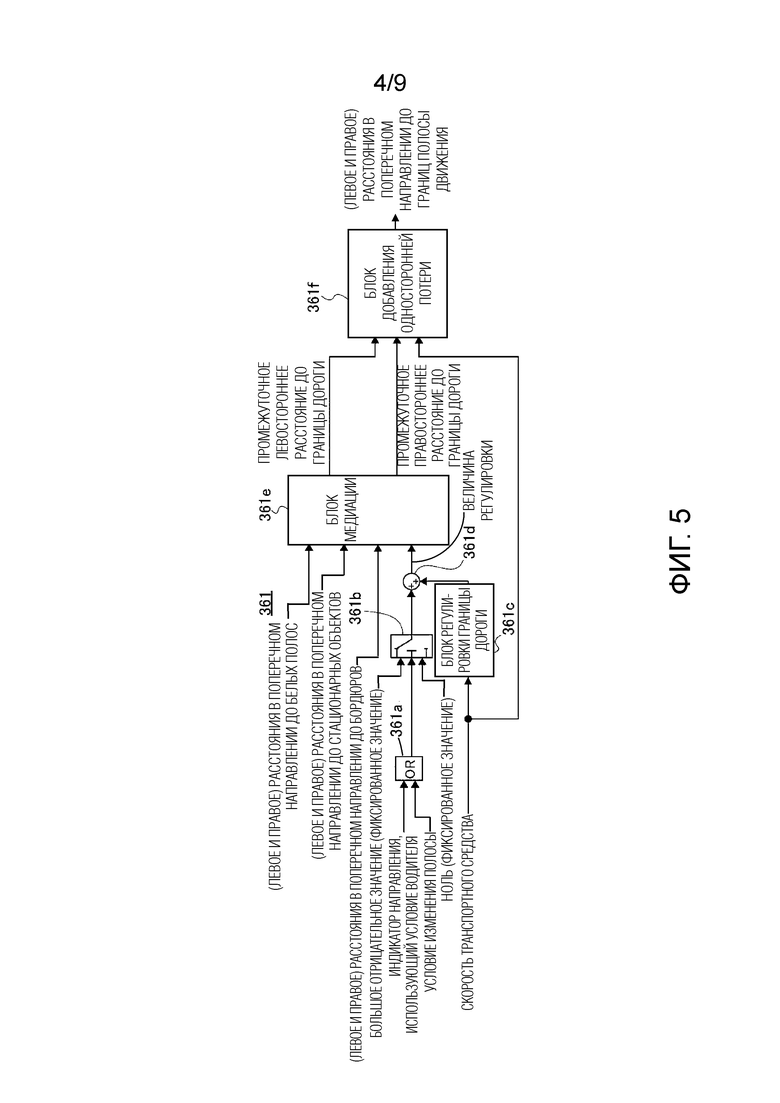
На фиг. 4 иллюстрируется корректор 36 целевого маршрута блока 3 управления навигацией (контроллер) в первом варианте осуществления. Общая конфигурация корректора 36 целевого маршрута будет описана ниже со ссылкой на фиг. 4.
[0038] Корректор 36 целевого маршрута корректирует навигационные ошибки, возникающие между положением рассматриваемого транспортного средства и целевым маршрутом, когда положение рассматриваемого транспортного средства, обнаруженное с помощью навигационной информации, накладывается на информацию карты во время автономной поездки. Эта коррекция производится с поперечных/в сторону движений целевого маршрута. Как показано на фиг. 4, корректор 36 целевого маршрута включает в себя блок 361 консолидации информации о границах дорог (блок обнаружения границы полосы), блок 362 вычисления величины 362 поперечной коррекции и блок 363 поперечного/в сторону движения.
[0039] Блок 361 консолидации информации о границах дорог принимает в качестве входных данных (левое и правое) расстояния в поперечном направлении до белых линий, (левое и правое), расстояния в поперечном направлении до стационарных объектов, (левое и правое) расстояния в поперечном направлении до бордюров, условия использования указателя поворота (сигнал поворота) водителем, условия смены полосы движения и информацию, такую как скорость транспортного средства. Блок консолидации информации о границах дороги 361 обнаруживает границы полосы движения полосы движения, по которой проезжает рассматриваемое транспортное средство A, и выводит (левое и правое) расстояния в поперечном направлении до границ полосы движения, по отношению к рассматриваемому транспортному средству A, для блока 362 вычисления величины поперечной коррекции.
[0040] Блок 362 вычисления величины поперечной коррекции получает, в качестве входных данных, целевой маршрут от блока 35 обработки поиска маршрута 35, (левые и правые) расстояния в поперечном направлении до границ полосы движения от блока 361 консолидации информации о границе дороги, условия использования указателя направления водителем, условия смены полосы движения и информации, такой как скорость транспортного средства. Блок 362 вычисления величины поперечной коррекции сравнивает взаимные расположения между границами полосы движения, которые были обнаружены, и целевым маршрутом на карте, и в ситуациях, когда целевой маршрут находится в пределах предписанного расстояния от границы полосы движения, или в ситуациях, когда целевой маршрут находится на противоположной стороне границы полосы движения от рассматриваемого транспортного средства А, рассчитывает величину поперечного смещения для целевого маршрута.
[0041] Блок 363 поперечного/в сторону перемещения принимает, в качестве входных данных, целевой маршрут от блока 35 обработки поиска маршрута и величину поперечной коррекции от блока 362 вычисления величины поперечной коррекции. Как показано в области B в нижней правой части фиг. 4, при вычислении величины поперечной коррекции, блок 363 поперечного/в сторону перемещения перемещает целевой маршрут в сторону в поперечном направлении на величину поперечной коррекции для коррекции целевого маршрута, и генерируется новый целевой маршрут. При коррекции целевого маршрута с перемещением в сторону, степень выравнивания между направлением хода рассматриваемого транспортного средства А и новым целевым маршрутом может быть увеличена, когда направление хода транспортного средства А и целевой маршрут расходятся друг с другом.
[0042] «Подробная конфигурация блока консолидации информации о границе дороги»
На фиг. 5 иллюстрируется блок 361 консолидации информации о границе дороги в корректоре 36 целевого маршрута. На фиг. 6 проиллюстрирован блок медиации в блоке 361 консолидации информации о границе дороги. Подробная конфигурация блока 361 консолидации информации о границе дороги будет описана ниже со ссылкой на фиг. 5 и 6.
[0043] Как показано на фиг. 5, блок консолидации информации о границе дороги 361 включает в себя схему 361a "ИЛИ", селектор 361b, блок регулировки границы дороги 361c, сумматор величины регулировки 361d, блок медиации 361e, и блок 361f добавления односторонней потери.
[0044] Когда селектор 361b не принимает в качестве входных данных условие использования водителем указателя направления или условие смены полосы движения через схему 361a «ИЛИ», селектор 361b выбирает значение ноль (фиксированное значение) для величины регулировки расстояния в поперечном направлении. Когда селектор 361b принимает в качестве входных данных условие, используемое водителем для указателя направления, или условие смены полосы движения через схему 361a «ИЛИ», селектор 361b применяет величину регулировки расстояния в поперечном направлении, которая постепенно уменьшает величину перемещения в сторону от целевого маршрута.
Другими словами, при перемещении целевого маршрута в сторону в поперечном направлении, если водитель выполняет промежуточную операцию рулевого управления, величина перемещения в сторону целевого маршрута постепенно уменьшается, и оценка вмешательства рулевого управления водителем производится с помощью операции сигнала поворота водителем.
[0045] Блок 361c регулировки границы дороги принимает, в качестве входных данных, скорость транспортного средства, и блок 361c регулировки границы дороги применяет величину регулировки расстояния в поперечном направлении, так что расстояние в поперечном направлении увеличивается, и величина, с которой целевой маршрут корректируется перемещением в сторону соответственно уменьшается относительно увеличения скорости транспортного средства.
[0046] Сумматор 361d величины регулировки добавляет величину регулировки расстояния в поперечном направлении от селектора 361b и величину регулировки расстояния в поперечном направлении от блока 361c регулировки границы дороги, и эта сумма используется в качестве величины регулировки в блоке медиации 361e.
[0047] Блок медиации 361e принимает, в качестве входных данных, (левое и правое) расстояния в поперечном направлении до белых линий, (левое и правое) расстояния в поперечном направлении до стационарных объектов, (левое и правое) расстояния в поперечном направлении до бордюров и величину регулировки расстояния в поперечном направлении от сумматора величины регулировки 361d. Блок медиации 361e выводит промежуточные расстояния влево до границ дороги и промежуточные расстояния вправо до границ дороги. Блок медиации 361e будет подробно описан ниже.
[0048] Блок 361f дополнения потерь в одну сторону принимает в качестве входных данных промежуточные расстояния влево до границ дороги, промежуточные расстояния вправо до границ дороги и скорость транспортного средства. Из промежуточных расстояний влево до границ дорог и промежуточных расстояний вправо до границ дорог, когда часть информации о расстоянии в поперечном направлении на одной стороне потеряна, блок 361f дополнения потерь в одну сторону дополняет информацию о расстоянии в поперечном направлении на стороне потери со скоростью транспортного средства, и выводит (левое и правое) расстояния в поперечном направлении до границ полосы движения.
[0049] Когда часть информации о расстоянии в поперечном направлении теряется в ситуациях, когда форма края дороги не параллельна дороге, края дороги обнаруживаются в пределах границ, соответствующих предписанному расстоянию, которое изменяется в зависимости от скорости рассматриваемого транспортного средства, значение обнаружения, основанное на крае дороги, ближайшем к рассматриваемому транспортному средству, используется в качестве информации о границе полосы движения. Тем самым дополняется информация о расстоянии в поперечном направлении на стороне потерь.
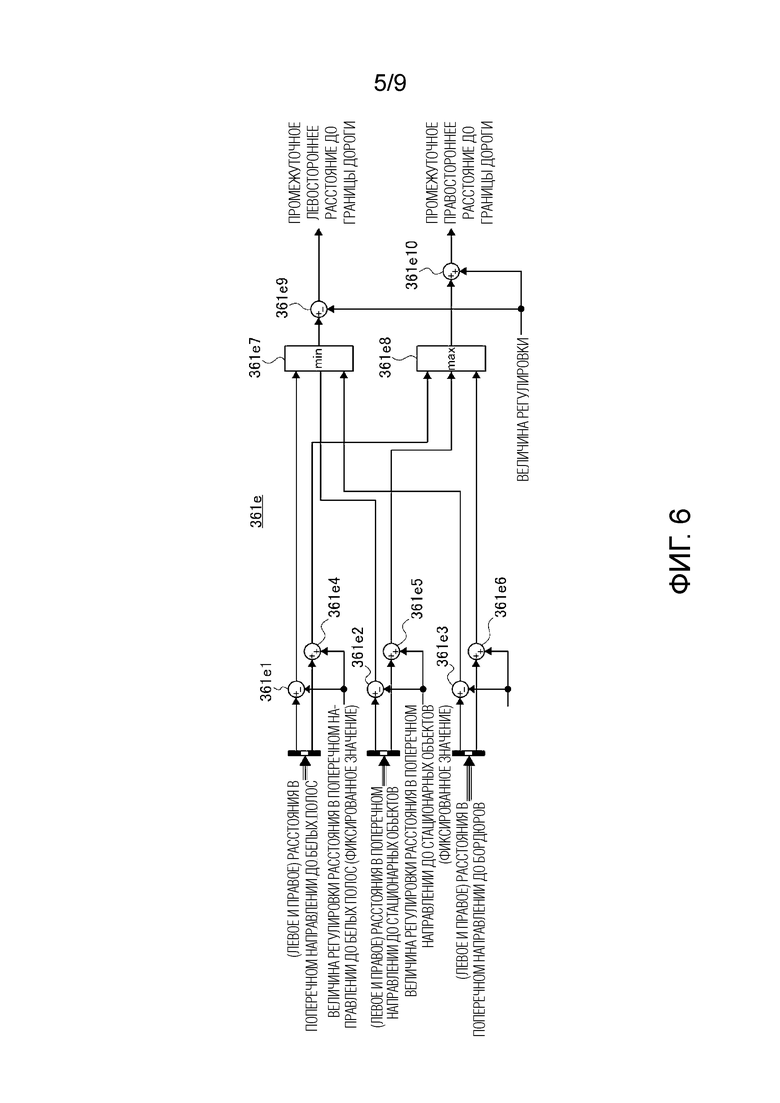
[0050] Как показано на фиг. 6, блок медиации 361e включает в себя вычитатели 361e1, 361e2, 361e3, сумматоры 361e4, 361e5, 361e6, селектор минимального значения 361e7, селектор максимального значения 361e8, вычитатель 361e9 последней ступени и сумматор последней ступени 361е10.
[0051] Расстояния в поперечном направлении (слева и справа) до сумматора белых линий 361e1 и вычитателя 361e4 принимают значение ноль (фиксированное значение) в качестве величины для регулировки расстояний в поперечном направлении до белых линий.
Другими словами, «белые линии» распознаются как края полосы движения для целевого маршрута рассматриваемого транспортного средства, и регулировка расстояния в поперечном направлении для этого не выполняется.
[0052] Расстояния в поперечном направлении (левое и правое) до сумматора 361e2 стационарных объектов и вычитателя 361e5 принимают заданное значение (фиксированное значение) в качестве величины для регулировки расстояний в поперечном направлении до стационарных объектов.
Другими словами, «стационарные объекты» распознаются как концы дороги, по которой движется рассматриваемое транспортное средство, и выполняется регулировка расстояния в поперечном направлении для получения информации о краях полосы движения от краев дороги. Иными словами, при обнаружении границ полосы движения полосы, по которой движется рассматриваемое транспортное средство, если обнаружено положение края дороги (стационарный объект), внутренняя позиция, соответствующая предписанной ширине от обнаруженного края дороги (стационарный объект), используется в качестве информации о границе полосы движения.
[0053] Расстояния в поперечном направлении (левое и правое) до сумматора 361e3 бордюров и вычитателя 361e6 принимают заданное значение (фиксированное значение) в качестве величины для регулировки расстояний в поперечном направлении до бордюров.
Другими словами, «бордюры» распознаются как концы дороги, по которой движется рассматриваемое транспортное средство, и выполняется регулировка расстояния в поперечном направлении для получения информации о краях полосы движения от краев дороги. Иными словами, при обнаружении границ полосы движения полосы, по которой движется рассматриваемое транспортное средство, если обнаружено положение края дороги (бордюр), внутреннее положение, соответствующее предписанной ширине от обнаруженного края дороги (бордюр), используется в качестве информация о границе полосы движения.
[0054]Селектор 361e7 минимального значения принимает, в качестве входных данных, (левое) расстояния в поперечном направлении до белых линий, которые прошли через вычитатель 361e2, (левое) расстояния в поперечном направлении до стационарных объектов, которые прошли через вычитатель 361e2, и (левое) расстояния в поперечном направлении до бордюров, которые прошли через вычитатель 361e3, выбирает минимальное значение и использует это значение в качестве расстояния в левом направлении до границы дороги.
Другими словами, при обнаружении границ полосы движения полосы движения, в которой движется рассматриваемое транспортное средство, если положение границы полосы движения (положение белой линии) и положение края дороги (положение неподвижного объекта или положение бордюра (обочины)) равны в случае обнаружения в качестве информации о границе полосы движения используется значение обнаружения внутренней позиции ближе к рассматриваемому транспортному средству.
[0055] Селектор максимального значения 361e8 получает, в качестве входных данных, расстояния (левое) в поперечном направлении до белых линий, прошедшие через сумматор 361e4, расстояния в поперечном направлении до стационарных объектов, которые прошли через сумматор 361e5, и (правое) расстояния в поперечном направлении до бордюров, которые прошли через сумматор 361e6, выбирает максимальное значение и использует это значение в качестве расстояния в правом направлении до границы дороги.
[0056] Вычитатель 361e9 последней ступени вычитает величину регулировки из сумматора 361d величины регулировки из расстояния в левом направлении до границы дороги из селектора 361e7 минимального значения, получая отрегулированное расстояние в левом направлении до границы дороги.
[0057] Сумматор 361e10 последней ступени добавляет величину регулировки из сумматора 361d величины регулировки из расстояния в направлении вправо от селектора 361e8 максимального значения, что приводит к скорректированному расстоянию в направлении вправо до границы дороги.
[0058] «Подробная конфигурация блока вычисления величины поперечной коррекции 362»
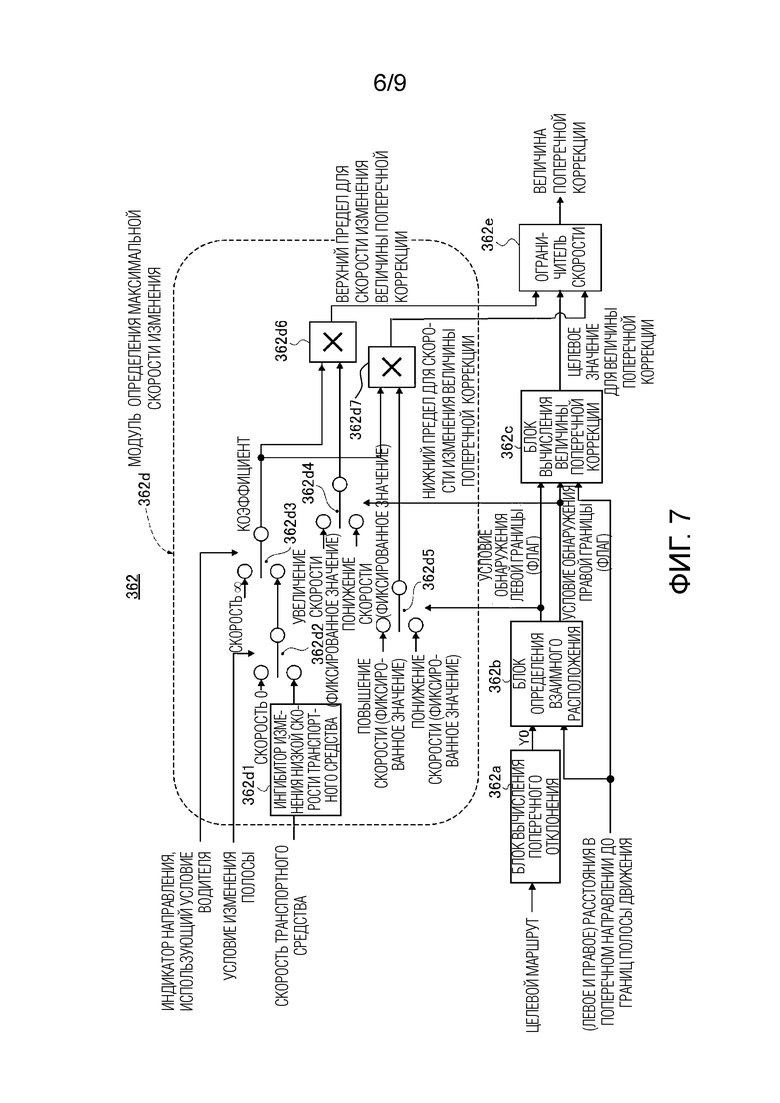
На фиг.7 показан блок 362 вычисления величины поперечной коррекции в корректоре 36 целевого маршрута. Подробная конфигурация блока 362 вычисления величины поперечной коррекции будет описана ниже со ссылкой на фиг.7.
[0059] Как проиллюстрировано на фиг.7, блок 362 вычисления величины поперечной коррекции включает в себя блок 362a вычисления поперечного отклонения, блок 362b определения взаимного расположения, блок 362c вычисления величины поперечной коррекции, блок 362d определения максимального значения скорости изменения и ограничитель скорости 362e.
[0060] Блок 362a вычисления поперечного отклонения принимает в качестве входных данных целевой маршрут от блока 35 обработки поиска маршрута и вычисляет поперечное отклонение Y0 между целевым маршрутом и рассматриваемым транспортным средством.
[0061] Блок 362b определения взаимного расположения получает, как входные данные, поперечное отклонение Y0 от блока 362a вычисления поперечного отклонения, и (левое и правое) поперечные расстояния направления к границам полосы от блока 361 консолидации информации о границах дорог. Сравнивая взаимные расположения между целевым маршрутом и краями полосы движения, блок 362b определения взаимного расположения позволяет определить (понять) позиционные взаимосвязи между целевым маршрутом и границами полосы движения. В ситуациях, когда целевой маршрут находится в пределах предписанного расстояния от (левой) границы полосы движения, или в ситуациях, когда целевой маршрут находится на противоположной стороне (левой) границы полосы движения от рассматриваемого транспортного средства, блок 362b определения взаимного расположения выводит условие обнаружения левой границы (флаг). В ситуациях, когда целевой маршрут находится в пределах предписанного расстояния от (правой) границы полосы движения, или в ситуациях, когда целевой маршрут находится на противоположной стороне (правой) границы полосы движения от рассматриваемого транспортного средства, блок 362b определения взаимного расположения выводит условие обнаружения правой границы (флаг).
[0062] Блок 362c вычисления величины поперечной коррекции принимает, в качестве входных данных, условие, определяющее левую границу (флаг), и условие, определяющее правую границу (флаг), из блока 362b определения взаимного расположения и (левое и правое) расстояния в поперечном направлении до границ полосы движения от блока 361 объединения информации о границе дороги. Блок 362c вычисления величины поперечной коррекции вычисляет величину поперечной коррекции, чтобы выровнять положение целевого маршрута и положение рассматриваемого транспортного средства, и затем выводит результат этого вычисления в качестве целевого значения для величины поперечной коррекции.
[0063] Блок 362d определения максимального значения скорости изменения принимает, в качестве входных данных, условие использования водителем указателя направления, условие изменения полосы движения, скорость транспортного средства, условие, определяющее левую границу (флаг), и условие, определяющее правую границу (флаг). Блок 362d определения максимального значения скорости изменения определяет нижнее предельное значение и верхнее предельное значение для скорости изменения величины поперечной коррекции (скорости движения целевого маршрута). Другими словами, при коррекции целевого маршрута с движением в сторону в поперечном направлении блок 362d определения максимального значения скорости изменения имеет функциональные возможности, которые не только ограничивают скорость движения (скорость изменения величины поперечной коррекции), при которой целевой маршрут перемещается в сторону в поперечном направлении до предписанной скорости, но также ограничивает скорость движения способом, который изменяется в соответствии с обстоятельствами. Подробная конфигурация блока 362d определения максимального значения скорости изменения будет описана ниже.
[0064] Ограничитель скорости 362e принимает в качестве входных данных целевое значение для величины поперечной коррекции из блока 362d определения максимального значения скорости изменения и нижнее предельное значение для скорости изменения величины поперечной коррекции и верхнее предельное значение для скорости изменения величины поперечной коррекции из блока 362d определения максимального значения скорости изменения. Скорость изменения величины поперечной коррекции (скорость движения целевого маршрута) используется для применения ограничения целевого значения для величины поперечной коррекции, в результате чего получается величина поперечной коррекции.
[0065] Блок 362d определения максимального значения скорости изменения включает в себя ингибитор 362d1 изменения низкой скорости транспортного средства, первый блок 362d2 переключения скорости, второй блок 362d3 переключения скорости, третий блок 362d4 переключения скорости, четвертый блок 362d5 переключения скорости, первый блок 362d6 суммирования скорости и второй блок 362d7 суммирования скорости.
[0066] Ингибитор 362d1 изменения низкой скорости транспортного средства принимает в качестве входных данных скорость транспортного средства и, если скорость транспортного средства рассматриваемого транспортного средства падает, выбирает скорость изменения, зависящую от скорости транспортного средства, так что скорость движения целевого маршрута уменьшается в соответствии с падением скорости транспортного средства. Если рассматриваемое транспортное средство останавливается, ингибитор 362d1 изменения низкой скорости транспортного средства устанавливает нулевую скорость изменения в зависимости от скорости транспортного средства.
[0067] Используя условие смены полосы движения в качестве триггера, первый блок 362d2 переключения скорости выбирает скорость изменения, зависящую от скорости транспортного средства, в сценариях нормального движения, не связанных с изменением полосы движения, и переключает скорость изменения на ноль при вводе условия смены полосы движения.
[0068] Используя состояние индикатора направления, используемого водителем, второй блок 362d3 переключения скорости переключается на скорость изменения от первого блока 362d2 переключения скорости, когда указатель направления не используется, и переключает скорость изменения на бесконечность при вводе с условием использования указателя направления.
[0069] Используя условие, определяющее правую границу (флаг) в качестве триггера, третий блок 362d4 переключения скорости переключает между увеличением скорости (фиксированное значение) и уменьшением скорости (фиксированное значение).
[0070] Используя условие, определяющее левую границу (флаг) в качестве триггера, четвертый блок 362d5 переключения скоростей переключает между увеличением скорости (фиксированное значение) и уменьшением скорости (фиксированное значение).
[0071] Первый блок 362d6 суммирования скорости принимает, в качестве входных данных, скорость изменения от второго блока 362d3 переключения скорости и скорость изменения от третьего блока 362d4 переключения скорости и суммирует обе скорости изменения для вычисления верхнего предельного значения для скорости изменения величины поперечной коррекции.
[0072] Второй блок 362d7 суммирования скорости принимает, в качестве входных данных, скорость изменения от второго блока 362d3 переключения скорости, и скорость изменения от четвертого блока 362d5 переключения скорости и суммирует обе скорости изменения для вычисления верхнего предельного значения для скорости изменения величины поперечной коррекции.
[0073] В блоке 362d определения максимального значения скорости изменения скорость движения (скорость изменения) целевого маршрута управляется, как указано ниже.
[0074] (a) При перемещении целевого маршрута в сторону в поперечном направлении, если рассматриваемое транспортное средство выполняет смену полосы движения, скорость движения целевого маршрута устанавливается равной нулю, и величина поперечного движения удерживается во время смены полосы движения (первый блок 362d2 переключения скорости).
[0075] (b) При перемещении целевого маршрута в сторону в поперечном направлении, если скорость транспортного средства рассматриваемого транспортного средства падает, скорость движения целевого маршрута уменьшается в соответствии с падением скорости транспортного средства (ингибитор 362d1 изменения низкой скорости транспортного средства).
[0076] (с) При перемещении целевого маршрута в сторону в поперечном направлении, если рассматриваемое транспортное средство останавливается, скорость движения целевого маршрута устанавливается равной нулю, и величина в сторону удерживается (ингибитор 362d1 изменения низкой скорости транспортного средства).
[0077] (d) При перемещении целевого маршрута в сторону в поперечном направлении, если левый и правый края полосы движения не обнаружены вблизи рассматриваемого транспортного средства, скорость движения целевого маршрута влево и вправо уменьшается (третий и четвертый блоки 362d4, 362d5 переключения скорости).
[0078] (e) При перемещении целевого маршрута в сторону в поперечном направлении, если край полосы движения обнаружен возле рассматриваемого транспортного средства только с левой стороны, скорость движения целевого маршрута влево уменьшается, а скорость движения целевого маршрута вправо увеличивается (третий и четвертый блоки 362d4, 362d5 переключения скорости).
[0079] (e) При перемещении целевого маршрута в сторону в поперечном направлении, если край полосы движения обнаружен возле рассматриваемого транспортного средства только с правой стороны, скорость движения целевого маршрута влево увеличивается, и скорость движения целевого маршрута вправо уменьшается (третий и четвертый блоки 362d4, 362d5 переключения скорости).
[0080] (g) При перемещении целевого маршрута в сторону в поперечном направлении, если левый и правый края полосы движения обнаружены вблизи рассматриваемого транспортного средства, скорость движения целевого маршрута влево и вправо уменьшается (третий и четвертый блоки 362d4, 362d5 переключения скорости).
[0081] Далее будут описаны операции.
Операция по первому варианту осуществления будет описана под заголовками «Операция коррекции целевого маршрута», «Операция контрастной управляемости транспортного средства при въезде на узкую полосу движения» и «Операция контрастной управляемости транспортного средства при въезде на широкую полосу».
[0082] «Операция коррекции целевого маршрута»
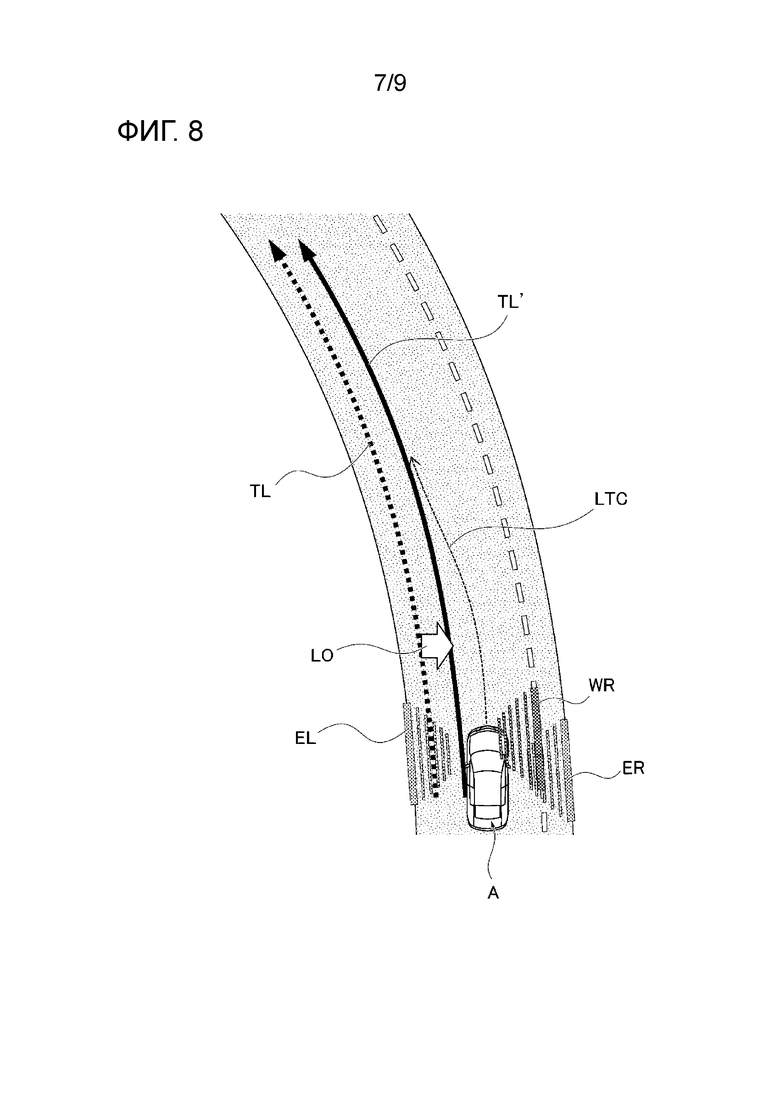
На фиг. 8 показана операция по коррекции целевого маршрута, выполняемая корректором целевого маршрута 36 блока 3 управления навигацией. Операция по коррекции целевого маршрута будет описана ниже со ссылкой на фиг. 8.
[0083] В первом варианте осуществления предусмотрен блок 3 управления навигацией. Блок 3 управления навигацией исправляет ошибки, возникающие между местоположением рассматриваемого транспортного средства и целевым маршрутом, когда положение рассматриваемого транспортного средства, обнаруженное с использованием навигационной информации, накладывается на информацию карты во время автономной поездки. Блок 3 управления навигацией включает в себя корректор 36 целевого маршрута, который корректирует целевые маршруты. Корректор 36 целевого маршрута включает в себя блок 361 консолидации информации о границе дороги, блок 362 вычисления величины поперечной коррекции и блок 363 поперечного/в сторону движения.
[0084] Границы полосы движения полосы, по которой движется рассматриваемое транспортное средство A, обнаруживаются в блоке 361 консолидации информации о границе дороги. То есть, как показано на фиг. 8, правая белая линия WR обнаруживается в качестве границы полосы движения правой камерой 13 распознавания. Кроме того, бордюр ER на правом краю дороги и бордюр EL на левом краю дороги обнаруживаются в качестве краев дороги лидаром 15. Соответственно, в ситуации, показанной на фиг. 8, граница правой полосы движения находится на внутренней стороне правой белой линии WR, а граница левой полосы движения находится в положении, установленном в направлении рассматриваемого транспортного средства A с внутренней стороны бордюра EL.
[0085] Затем, позиционные отношения между целевым маршрутом TL на карте и границей левой полосы и границей правой полосы, которые были обнаружены, сравниваются в блоке 362 вычисления величины поперечной коррекции. В ситуации, показанной на фиг. 8, в то время как существует достаточное расстояние между целевым маршрутом TL и границей правой полосы движения, расстояние между целевым маршрутом TL и границей левой полосы слишком короткое. Соответственно, на основе оценки того, что целевой маршрут TL находится в пределах предписанного расстояния от границы левой полосы движения, величина для смещения целевого маршрута TL к правой стороне фиг. 8 рассчитывается как величина LO поперечной коррекции для целевого маршрута TL в блоке 362 вычисления величины поперечной коррекции.
[0086] После того, как величина LO поперечной коррекции вычисляется блоком 362 вычисления величины поперечной коррекции, целевой маршрут TL перемещается в сторону в поперечном направлении на величину LO поперечной коррекции, чтобы скорректировать целевой маршрут TL в блоке 363 поперечного/в сторону движения, тем самым генерируя новый целевой маршрут TL'. Соответственно, рассматриваемое транспортное средство А выполняет автономную поездку с использованием управления LTC трассы линии, так что рассматриваемое транспортное средство A приближается к новому целевому маршруту TL' из текущего положения.
[0087] Таким образом, поскольку целевой маршрут LT перемещается в сторону, так что рассматриваемое транспортное средство A остается в пределах полосы движения, а не корректирует собственное положение рассматриваемого транспортного средства, можно вносить исправления, которые учитывают только управляемость транспортного средства (выбор «плавность хода» или «невыезд/не столкновение» в соответствии со сценарием).
[0088] Операция контрастной управляемости транспортного средства при въезде на узкую полосу движения
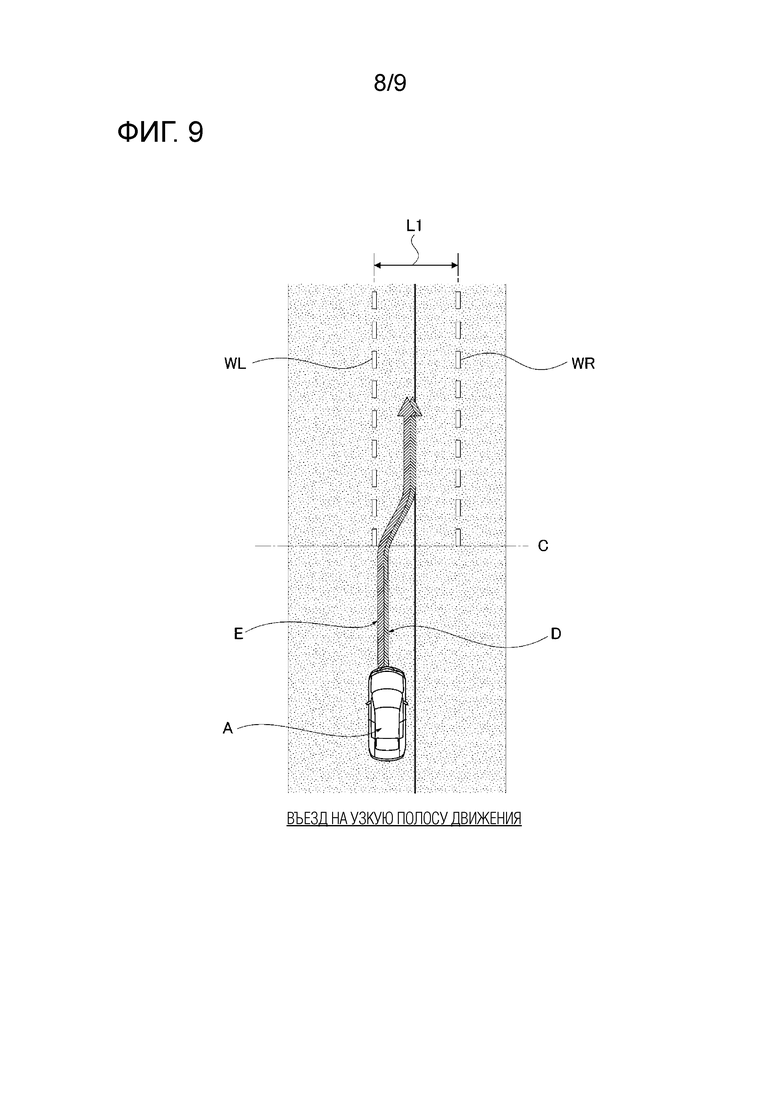
Фиг.9 иллюстрирует управляемость транспортного средства в сравнительном примере и управляемость транспортного средства в первом варианте осуществления при въезде в узкую полосу во время операции коррекции целевого маршрута. Операция контрастной управляемости транспортного средства при въезде в узкую полосу движения будет описана ниже со ссылкой на фиг. 9.
Здесь сравнительный пример определяется как тот, в котором навигационная ошибка, возникающая между положением рассматриваемого транспортного средства и целевым маршрутом, корректируется путем коррекции собственного положения рассматриваемого транспортного средства.
[0089] Как показано на фиг. 9, въезд на узкую полосу движения относится к сценарию, в котором рассматриваемое транспортное средство внезапно въезжает на узкую полосу движения, имеющую узкую поперечную ширину L1 между левой и правой белыми линиями WL, WR, с дороги, в которой отсутствуют левая и правая белые линии WL, WR. В сценарии, в котором вводится узкая полоса движения, в сравнительном примере, когда рассматриваемое транспортное средство A достигает положения C и распознает центр полосы движения, коррекция собственного положения рассматриваемого транспортного средства A выполняется так, что поперечное положение транспортное средство A быстро возвращается в центр полосы движения. Соответственно, в сравнительном примере рассматриваемое транспортное средство А проезжает по линии D.
[0090] Напротив, в сценарии, в котором вводится узкая полоса движения, в первом варианте осуществления, когда рассматриваемое транспортное средство A достигает положения C, и обнаруживается, что левая белая линия WL находится в положении, перекрывающемся с рассматриваемым транспортным средством A, коррекция, которая перемещает целевой маршрут в сторону в поперечном направлении, выполняется со скоростью движения в сторону, которая быстро возвращает целевой маршрут к центру полосы движения. Соответственно, в первом варианте осуществления, рассматриваемое транспортное средство проезжает вдоль линии Е, которая почти такая же, как линия D.
[0091] Таким образом, вхождение в узкую полосу движения является сценарием, в котором «плавность хода» и «невыезд/не столкновение», «невыезд/не столкновение» должен быть приоритетным. Для этого, в первом варианте осуществления, в сценарии, в котором вводится узкая полоса движения, может быть выбрана коррекция целевого маршрута с высокой скоростью движения в сторону, которая имеет приоритет «невыезд/не столкновение».
[0092] «Операция контрастной управляемости транспортного средства при въезде на широкую полосу»
Фиг. 10 иллюстрирует управляемость транспортного средства в сравнительном примере и управляемость транспортного средства в первом варианте осуществления при въезде на широкую полосу во время операции коррекции целевого маршрута. Операция контрастной управляемости транспортного средства при въезде на узкую полосу движения будет описана ниже со ссылкой на фиг. 10. Здесь сравнительный пример определяется как тот, в котором навигационная ошибка, возникающая между положением рассматриваемого транспортного средства и целевым маршрутом, корректируется путем коррекции собственного положения рассматриваемого транспортного средства.
[0093] Как показано на фиг. 10, въезд на широкую полосу движения относится к сценарию, в котором рассматриваемое транспортное средство внезапно въезжает на узкую полосу движения, имеющую широкую поперечную ширину L2 (>L1) между левой и правой белыми линиями WL, WR, с дороги, в которой отсутствуют левая и правая белые линии WL, WR. В сценарии, в котором вводится широкая полоса движения, в сравнительном примере, когда рассматриваемое транспортное средство A достигает положения C и распознает центр полосы движения, коррекция собственного положения рассматриваемого транспортного средства A выполняется так, что поперечное положение транспортного средства A быстро возвращается в центр полосы движения. Соответственно, в сравнительном примере рассматриваемое транспортное средство А проезжает по линии D.
[0094] Напротив, в сценарии, в котором вводится широкая полоса движения, в первом варианте осуществления, когда рассматриваемое транспортное средство A достигает положения C, и обнаруживается, что левая белая линия WL находится в положении, перекрывающемся с рассматриваемым транспортным средством A, коррекция, которая перемещает целевой маршрут в сторону в поперечном направлении, выполняется со скоростью движения в сторону, которая быстро возвращает целевой маршрут к центру полосы движения. Соответственно, в первом варианте осуществления, рассматриваемое транспортное средство A проезжает вдоль линии E', которая, в отличие от линии D движения, сводит поперечную часть G транспортного средства к минимуму.
[0095] Таким образом, вхождение в широкую полосу движения является сценарием, в котором «плавность хода» и «невыезд/не столкновение» должен быть приоритетным. Для этого в первом варианте осуществления целевая коррекция маршрута с низкой скоростью движения в сторону, которая отдает приоритет «плавности хода», может быть выбрана в сценарии, в котором вводится широкая полоса движения.
[0096] Далее будут описаны эффекты настоящего раскрытия. Эффекты, приведенные ниже в качестве примера, достигаются с помощью способа и устройства для исправления ошибки положения автономного транспортного средства первого варианта осуществления.
[0097] (1) Предусмотрен контроллер (блок 3 управления навигацией), который корректирует ошибку, возникающую между положением рассматриваемого транспортного средства и целевым маршрутом во время поездки с поддержкой вождения (во время автономного движения). В способе коррекции ошибки положения транспортного средства с поддержкой вождения обнаруживается граница полосы движения, по которой перемещается рассматриваемое транспортное средство. Взаимные расположения между обнаруженной границей полосы движения и целевым маршрутом на карте сравниваются, а также в ситуациях, когда целевой маршрут находится в пределах предписанного расстояния от границы полосы движения, или в ситуациях, когда целевой маршрут находится на противоположной стороне от границы полосы движения с рассматриваемым транспортным средством целевой маршрут корректируется движением в сторону в поперечном направлении (фиг. 8). Соответственно, может быть предоставлен способ для исправления ошибки положения транспортного средства с поддержкой вождения (автономного транспортного средства), с помощью которого можно выбирать, устанавливать ли приоритетность по плавности хода или приоритета невыезда, в зависимости от сценария, и достижения управления транспортным средством, когда можно чувствовать себя более непринужденно.
[0098] (2) При обнаружении границы полосы движения полосы движения, по которой движется рассматриваемое транспортное средство, если обнаруживается положение края дороги, в качестве информации о границе полосы движения используется внутренняя позиция, соответствующая заданной ширине от обнаруженной границы полосы движения (фиг. 6). Соответственно, в дополнение к эффекту (1), даже на дорогах, которые не имеют границы полосы движения (белая линия), при условии, что может быть обнаружен край дороги, такой как бордюр, коррекция целевого маршрута с движением в сторону в поперечном направлении может продолжаться.
[0099] (3) При обнаружении границы полосы движения полосы движения, по которой движется рассматриваемое транспортное средство, если обнаружены как положение границы полосы движения, так и положение края дороги, значение обнаружения внутреннего положения, расположенного ближе к рассматриваемому транспортному средству, используется в качестве информации о границе полосы движения (фиг. 6). Соответственно, в дополнение к эффекту (2), рассматриваемое транспортное средство может проехать предписанное расстояние внутри положения, где присутствует край дороги, такой как бордюр, и водитель может чувствовать себя более непринужденно.
[0100] (4) При обнаружении границы полосы движения полосы движения, по которой движется рассматриваемое транспортное средство, по краям дороги, обнаруженным в пределах границ, соответствующих предписанному расстоянию, которое изменяется в зависимости от скорости транспортного средства рассматриваемого транспортного средства, значение обнаружения на основе края дороги, ближайшего к рассматриваемому транспортному средству, используется в качестве информации о границе полосы движения (фиг. 5). Соответственно, в дополнение к эффекту (2) или (3), даже в местах, где форма края дороги не параллельна дороге, можно добиться коррекции целевого маршрута движением в сторону в поперечном направлении.
[0101] (5) При корректировке целевого маршрута с движением в сторону в поперечном направлении скорость движения, при которой целевой маршрут перемещается в сторону в поперечном направлении, ограничивается заданной скоростью (фиг.7). Соответственно, помимо эффектов (1) - (4), путем ограничения скорости движения, при которой целевой маршрут перемещается в сторону в поперечном направлении, до заданной скорости, управляемость транспортного средства рассматриваемого транспортного средства может быть сделана плавной.
[0102] (6) При корректировке целевого маршрута с движением в сторону скорость движения, при которой целевой маршрут перемещается в сторону в поперечном направлении, ограничивается манерой, которая изменяется в соответствии с обстоятельствами (фиг. 7). Соответственно, в дополнение к эффекту (5), можно выбрать, что из «плавности хода» и «невыезда/не столкновения» должен быть приоритетным согласно сценарию. Это приводит к управляемости транспортного средства, когда можно чувствовать себя более непринужденно, чем когда скорость движения назначается с помощью фиксированной скорости.
[0103] (7) При перемещении целевого маршрута в сторону в поперечном направлении: если левый и правый края полосы движения не обнаружены вблизи рассматриваемого транспортного средства, скорость движения целевого маршрута влево и вправо уменьшается; если край полосы движения обнаружен возле рассматриваемого транспортного средства только с левой стороны, скорость движения целевого маршрута влево уменьшается, а скорость движения целевого маршрута вправо увеличивается; если край полосы движения обнаружен возле рассматриваемого транспортного средства только с правой стороны, скорость движения целевого маршрута влево увеличивается, а скорость движения целевого маршрута вправо уменьшается; и если левый и правый края полосы движения обнаружены возле рассматриваемого транспортного средства, скорость движения целевого маршрута влево и вправо увеличивается (фиг. 7). Соответственно, вдобавок к эффекту (6), когда поблизости обнаруживается белая линия или бордюр, рассматриваемое транспортное средство быстро удаляется от белой линии или бордюра, в результате чего "невыезд/не столкновение" может быть приоритетным. Если рядом не обнаруживается белая линия или бордюр, то рассматриваемое транспортное средство медленно выполняет поперечное движение, в результате чего может быть отдано предпочтение «плавности хода».
[0104] (8) При перемещении целевого маршрута в сторону в поперечном направлении, если рассматриваемое транспортное средство выполняет смену полосы движения, скорость движения целевого маршрута устанавливается равной нулю, и величина движения в сторону удерживается во время смены полосы движения (Фиг. 7). Соответственно, в дополнение к эффекту (6) или (7), из-за целевого маршрута и пересечения границы полосы движения, можно предотвратить ненужные исправления целевого маршрута, и исправления к целевому маршруту могут продолжаться до тех пор, пока изменение полосы движения не закончится. Это приводит к "плавности хода" и "невыезду/не столкновению" в управляемости транспортным средством, в том числе при смене полосы движения.
[0105] (9) При перемещении целевого маршрута в сторону в поперечном направлении, если скорость транспортного средства рассматриваемого транспортного средства падает, скорость движения целевого маршрута уменьшается в соответствии с падением скорости транспортного средства (фиг.7). Соответственно, помимо эффектов (6) - (8), путем уменьшения скорости движения в сторону и уменьшения угла поворота рулевого колеса, когда скорость транспортного средства падает, водителю может обрести чувство безопасности. Когда скорость транспортного средства падает, если угол поворота рулевого колеса не увеличивается, одинаковая скорость движения в сторону не может быть обеспечена.
[0106] (10) При перемещении целевого маршрута в сторону в поперечном направлении, если рассматриваемое транспортное средство останавливается, скорость движения целевого маршрута устанавливается равной нулю, и величина поперечного перемещения сохраняется (фиг.7). Соответственно, в дополнение к эффекту (9), препятствуя движению рулевого колеса в соответствии с коррекцией целевого маршрута при остановке, водитель может обрести чувство безопасности.
[0107] (11) При перемещении целевого маршрута в сторону в поперечном направлении, если водитель выполняет промежуточную операцию рулевого управления, величина поперечного перемещения целевого маршрута постепенно уменьшается (фиг.5). Соответственно, в дополнение к эффектам (1) - (10), в ответ на большое изменение в позиционном соотношении между целевым маршрутом и результатом обнаружения края полосы движения при вмешательстве в действие рулевого управления, путем постепенного уменьшения движения в сторону ненужные коррекции целевого маршрута могут быть предотвращены.
[0108] (12) Оценка вмешательства оператора в рулевое управление выполняется с использованием сигнала поворота водителем (фиг. 5). Соответственно, помимо эффекта (11), намерение водителя выполнить промежуточную операцию рулевого управления может быть надежно и быстро отражено посредством выполнения оценки с использованием операции сигнала поворота до операции рулевого управления.
[0109] (13) Предусмотрен контроллер (блок 3 управления навигацией), который корректирует ошибку, возникающую между положением рассматриваемого транспортного средства и целевым маршрутом во время движения с поддержкой вождения (во время автономного движения). В устройстве для коррекции ошибки положения транспортного средства с поддержкой вождения (автономного транспортного средства) контроллер (блок 3 управления навигацией) включает в себя корректор 36 целевого маршрута, который корректирует целевой маршрут. Корректор 36 целевого маршрута включает в себя блок обнаружения границы полосы движения (блок 361 консолидации информации о границе дороги), блок 362 вычисления величины поперечной коррекции и блок 363 поперечного/в сторону движения.
Блок обнаружения границы полосы движения (блок 361 консолидации информации о границе дороги) обнаруживает границу полосы движения полосы, по которой движется рассматриваемое транспортное средство. Блок 362 вычисления величины поперечной коррекции сравнивает взаимные расположения между границей полосы движения, которая была обнаружена, и целевым маршрутом на карте, и в ситуациях, когда целевой маршрут находится в пределах предписанного расстояния от границы полосы движения, или в ситуациях, когда целевой маршрут находится на противоположной стороне границы полосы движения от рассматриваемого транспортного средства рассчитывает величину поперечной коррекции для целевого маршрута. Блок 363 поперечного/в сторону движения после вычисления величины поперечной коррекции перемещает целевой маршрут в сторону в поперечном направлении на величину поперечной коррекции, чтобы скорректировать целевой маршрут (фиг. 4). Соответственно, может быть обеспечено устройство для коррекции ошибки положения транспортного средства с поддержкой вождения (автономного транспортного средства), с помощью которого можно выбирать, устанавливать ли приоритетность по плавности хода или приоритета невыезда, в зависимости от сценария, и достижения управления транспортным средством, когда можно чувствовать себя более непринужденно.
[0110] Выше было описано со ссылкой на первый вариант осуществления способ и устройство для коррекции ошибки положения транспортного средства с поддержкой вождения согласно настоящему раскрытию. Однако его конкретная конфигурация не ограничена таковой в первом варианте осуществления, и модификации конструкции, дополнения и т. д. возможны без отклонения от сущности изобретения, изложенной в прилагаемой формуле изобретения.
[0111] В первом варианте осуществления был представлен пример, в котором блок 3 управления навигацией используется в качестве контроллера, который генерирует целевой маршрут к пункту назначения из текущего положения рассматриваемого транспортного средства. Однако автономный блок управления движением может использоваться в качестве контроллера, который генерирует целевой маршрут к пункту назначения из текущего положения рассматриваемого транспортного средства. Функциональные возможности генерации целевого маршрута также могут быть разделены на две части, причем часть этих функциональных возможностей назначается блоку управления навигацией, а оставшаяся часть назначается автономному блоку управления движением.
[0112] В первом варианте осуществления был представлен пример, в котором способ и устройство для коррекции ошибки положения настоящего раскрытия применяются к автономному транспортному средству, в котором рулевое управление / движение/ торможение автоматически управляются в соответствии с выбором автономного режима вождения. Однако способ и устройство для коррекции ошибки положения для настоящего раскрытия могут быть применены к любому транспортному средству с поддержкой вождения, которое помогает водителю в любой части операции руления / операции движения / операции торможения. Вкратце, способ и устройство для коррекции ошибки положения для настоящего раскрытия могут применяться к любому транспортному средству, которое помогает вождению водителя, путем коррекции ошибки, возникающей между положением рассматриваемого транспортного средства и целевым маршрутом.
Изобретение относится к способу и устройству для коррекции ошибки позиции в автомобиле с содействием вождению. Способ коррекции ошибки положения транспортного средства с поддержкой привода, содержащего контроллер, который исправляет ошибку, возникающую между положением транспортного средства и целевым маршрутом во время поездки с поддержкой привода. Способ содержит обнаружение границы полосы движения, по которой движется транспортное средство и сравнение взаимных расположений между границей полосы движения, которая была обнаружена, и целевым маршрутом на карте. Корректировка целевого маршрута с величиной перемещения в сторону в поперечном направлении производится в ситуациях, когда целевой маршрут находится в пределах предписанного расстояния от границы полосы движения, или в ситуациях, когда целевой маршрут находится на противоположной стороне границы полосы движения от транспортного средства. Достигается повышение безопасности управления транспортным средством. 2 н. и 11 з.п. ф-лы, 10 ил.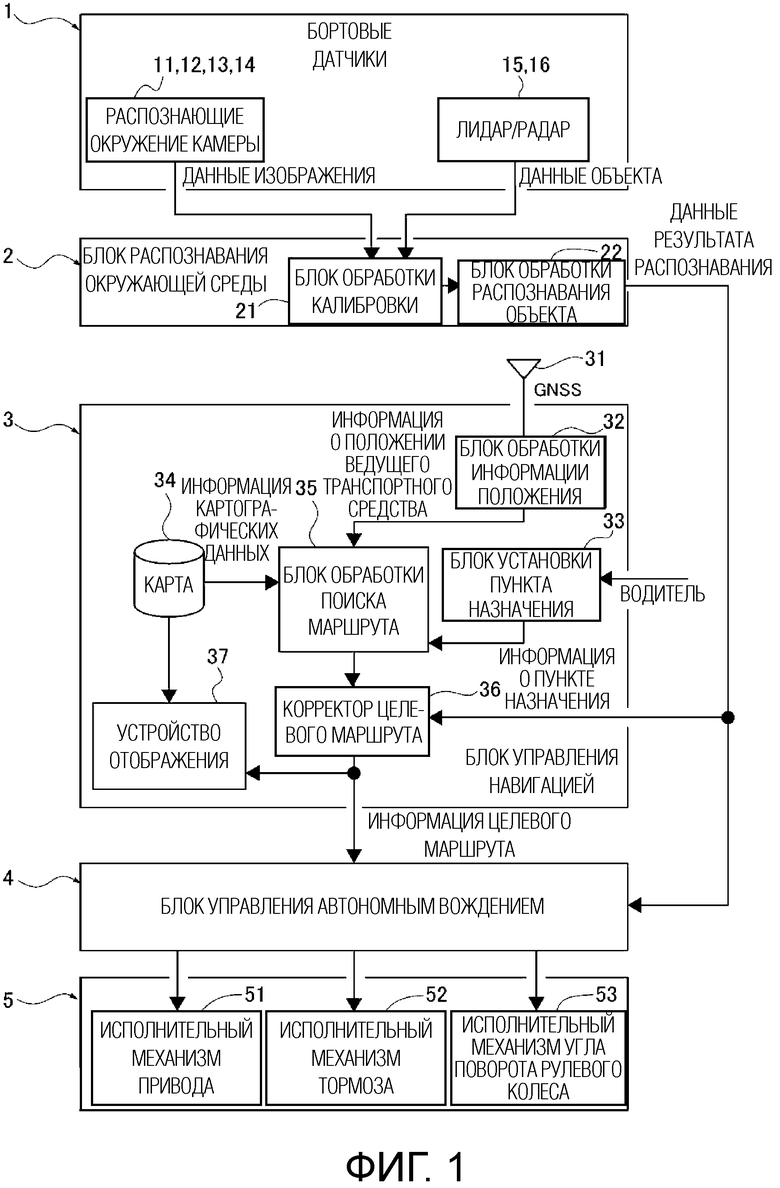
1. Способ коррекции ошибки положения транспортного средства с поддержкой вождения, содержащего контроллер, который исправляет ошибку, возникающую между положением рассматриваемого транспортного средства и целевым маршрутом во время поездки с поддержкой вождения, причем способ содержит:
обнаружение границы полосы движения, по которой движется рассматриваемое транспортное средство;
сравнение взаимных расположений между границей полосы движения, которая была обнаружена, и целевым маршрутом на карте, и корректировку целевого маршрута с величиной перемещения в сторону в поперечном направлении в ситуациях, когда целевой маршрут находится в пределах предписанного расстояния от границы полосы движения, или в ситуациях, когда целевой маршрут находится на противоположной стороне границы полосы движения от рассматриваемого транспортного средства.
2. Способ коррекции ошибки положения транспортного средства с поддержкой вождения по п. 1, в котором
при обнаружении границы полосы движения полосы движения, по которой движется рассматриваемое транспортное средство, если обнаружено положение края дороги, в качестве информации о границе полосы движения используется внутреннее положение, соответствующее заданной ширине от обнаруженного края дороги.
3. Способ коррекции ошибки положения транспортного средства с поддержкой вождения по п. 1, в котором
при обнаружении границы полосы движения для полосы движения, по которой проезжает рассматриваемое транспортное средство, если обнаружено как положение границы полосы движения, так и положение края дороги, в качестве информации о границе полосы движения используется значение определения внутреннего положения ближе к рассматриваемому транспортному средству.
4. Способ коррекции ошибки положения транспортного средства с поддержкой вождения по любому из пп. 2 или 3, в котором
при обнаружении границы полосы движения полосы движения, по которой проезжает рассматриваемое транспортное средство, по краям дороги, обнаруженным в пределах границ, соответствующих предписанному расстоянию, которое изменяется в зависимости от скорости транспортного средства рассматриваемого транспортного средства, значение обнаружения на основе края дороги, ближайшего к рассматриваемому транспортному средству, используется в качестве информации о границе полосы движения.
5. Способ коррекции ошибки положения транспортного средства с поддержкой вождения по любому из пп. 1-4, в котором
при корректировке целевого маршрута с движением в сторону в поперечном направлении скорость движения, при которой целевой маршрут перемещается в сторону в поперечном направлении, ограничивается заданной скоростью.
6. Способ коррекции ошибки положения транспортного средства с поддержкой вождения по п. 5, в котором
при корректировке целевого маршрута с движением в сторону в поперечном направлении скорость движения, при которой целевой маршрут перемещается в сторону в поперечном направлении, ограничивается способом, изменяющимся в зависимости от обстоятельств.
7. Способ коррекции ошибки положения транспортного средства с поддержкой вождения по п. 6, в котором
при перемещении целевого маршрута в сторону в поперечном направлении,
если левый и правый края полосы движения не обнаружены вблизи рассматриваемого транспортного средства, скорость движения целевого маршрута влево и вправо уменьшается,
если край полосы движения обнаружен возле рассматриваемого транспортного средства только с левой стороны, скорость движения целевого маршрута влево уменьшается, а скорость движения целевого маршрута вправо увеличивается,
если край полосы движения обнаружен возле рассматриваемого транспортного средства только с правой стороны, скорость движения целевого маршрута влево увеличивается, а скорость движения целевого маршрута вправо уменьшается, и
если левый и правый края полосы движения обнаружены вблизи рассматриваемого транспортного средства, скорость движения целевого маршрута влево и вправо увеличивается.
8. Способ коррекции ошибки положения транспортного средства с поддержкой вождения по любому из пп. 6 или 7, в котором
при перемещении целевого маршрута в сторону в поперечном направлении, если рассматриваемое транспортное средство выполняет смену полосы движения, скорость движения целевого маршрута устанавливается равной нулю, и величина движения в сторону удерживается во время смены полосы движения.
9. Способ коррекции ошибки положения транспортного средства с поддержкой вождения по любому из пп. 6-8, в котором
при перемещении целевого маршрута в сторону, если скорость транспортного средства рассматриваемого транспортного средства падает, скорость движения целевого маршрута уменьшается в соответствии с падением скорости транспортного средства.
10. Способ коррекции ошибки положения транспортного средства с поддержкой вождения по п. 9, в котором
при перемещении целевого маршрута в сторону в поперечном направлении, если рассматриваемое транспортное средство останавливается, скорость движения целевого маршрута устанавливается равной нулю, и величина движения в сторону удерживается.
11. Способ коррекции ошибки положения транспортного средства с поддержкой вождения по любому из пп. 1-10, в котором
при перемещении целевого маршрута в сторону в поперечном направлении, если водитель выполняет промежуточную операцию рулевого управления, величина перемещения в сторону целевого маршрута постепенно уменьшается.
12. Способ коррекции ошибки положения транспортного средства с поддержкой вождения по п. 11, в котором
оценка вмешательства рулевого управления водителем производится с помощью операции сигнала поворота водителем.
13. Устройство коррекции ошибки положения транспортного средства с поддержкой вождения, содержащее:
контроллер, корректирующий ошибку, возникающую между положением рассматриваемого транспортного средства и целевым маршрутом во время поездки с поддержкой вождения,
причем контроллер содержит корректор целевого маршрута, который корректирует целевой маршрут, и
корректор целевого маршрута включает в себя
блок обнаружения границы полосы движения, который обнаруживает границу полосы движения полосы, по которой движется рассматриваемое транспортное средство,
блок вычисления величины поперечной коррекции, который сравнивает взаимные расположения между границей полосы движения, которая была обнаружена, и целевым маршрутом на карте, и который вычисляет величину поперечной коррекции для целевого маршрута и в ситуациях, когда целевой маршрут находится в пределах предписанного расстояния от границы полосы движения, или в ситуациях, когда целевой маршрут находится на противоположной стороне границы полосы движения от рассматриваемого транспортного средства, и
блок поперечного/в сторону движения, который перемещает целевой маршрут в сторону в поперечном направлении на величину поперечной коррекции для коррекции целевого маршрута, при вычислении величины поперечной коррекции.
| JP 2015205635 A, 19.11.2015 | |||
| JP 2016151864 A, 22.08.2016 | |||
| УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2566175C1 |

