Область техники
[0001] Настоящее раскрытие относится к способу помощи при вождении и устройству помощи при вождении.
Описание предшествующего уровня техники
[0002] Известно традиционное автономное устройство вождения, в котором аудио информация, указывающая «автоматическое рулевое управление будет деактивировано, будьте готовы», выдается из динамика, когда происходит переключение с автономного вождения на вождение с участием водителя, и автоматическое рулевое управление деактивируется, чтобы перепоручить рулевое управление водителю. Если автоматическое рулевое управление деактивировано, затем оценивается, находится или нет отклонение передвижения в допустимом диапазоне. Если и только если эта оценка - «Да», выдается аудио информация, указывающая, что «автоматический акселератор и автоматический тормоз будут деактивированы, будьте готовы», и автоматический акселератор и автоматический деактивируются, что перепоручить акселератор и тормоз водителю. Впоследствии отображение «активного автономного вождения» на экране устройства отображения прекращается (например, см. патентную ссылку 1).
Ссылки на предшествующий уровень техники
Патентные ссылки
[0003] Патентная ссылка 1: опубликованная заявка на патент Японии №. H9-86223
Сущность изобретения
Проблема, решаемая изобретением
[0004] В традиционном устройстве автоматическое рулевое управление сначала отменяется, а автоматический акселератор и автоматический тормоз деактивируются после того, как целевой сегмент был пройден, когда происходит переключение с автономного вождения на вождение с участием водителя. Однако существовала проблема, заключающаяся в том, что при управлении помощью при операциях вождения, осуществляемых водителем, требуется более надежная передача от системы к водителю в ассоциации с достижениями в области помощи при вождении, которые повышают уровень помощи при операциях вождения водителя.
[0005] Настоящее раскрытие было создано для решения этой проблемы, и его цель состоит в том, чтобы более надежно выполнять передачу от системы к водителю за счет ступенчатого снижения уровня помощи при вождении, когда заранее известно, что помощь рулевого колеса будет деактивирована в сценарии передвижения, который включает в себя режим с повышенным уровнем помощи при вождении.
Техническое решение
[0006] Для достижения этой цели настоящее раскрытие относится к способу помощи при вождении, который включает в себя функцию управления скоростью/продвижением транспортного средства и функцию удержания полосы движения в качестве функций для помощи при операциях вождения, осуществляемых водителем, и который использует контроллер перехода режима для перехода между режимами помощи при вождении. Способ помощи при вождении включает в себя, в качестве режимов помощи при вождении, режим свободных рук, в котором водителю разрешено убирать его руки с рулевого колеса, ручной режим, который включает в себя условие, что водитель держит свои руки на рулевом колесе, режим операции рулевого колеса, который побуждает водителя выполнять операции рулевого колеса, и и режим деактивации помощи рулевого колеса, в котором деактивирована функция удержания полосы движения. Информация об участке деактивации помои рулевого колеса, на котором помощь рулевого колеса должна быть деактивирована, захватывается во время передвижения с удержанием полосы движения, на котором режим свободных рук был выбран. Переход режима из режима свободных рук в ручной режим запрашивается на основе информации об участке деактивации помощи рулевого колеса. После запроса перехода режима в ручной режим, делается определение, находятся ли руки водителя на рулевом колесе. Переход режима из режима свободных рук в режим операции рулевого колеса запрашивается при условии, что подтверждено, что руки водителя находятся на рулевом колесе. После запроса перехода режима в режим операции рулевого колеса, делается определение, выполнил или нет водитель операцию рулевого колеса. Переход режима выполняется из режима операции рулевого колеса в режим деактивации помощи рулевого колеса при условии, что подтверждена операция рулевого колеса водителя перед тем, как главное транспортное средство достигнет участка деактивации помощи рулевого колеса.
ЭФФЕКТ ИЗОБРЕТЕНИЯ
[0007] Поскольку используются средства для решения проблемы, описанной выше, можно более надежно выполнять передачу от системы к водителю за счет ступенчатого снижения уровня помощи при вождении, когда заранее известно, что помощь рулевого колеса будет деактивирована в сценарии передвижения, включающем в себя режим с повышенным уровнем помощи при вождении.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг. 1 - это общая схема системы, показывающая усовершенствованную систему помощи водителю, к которой были применены способ помощи при вождении и устройство помощи при вождении согласно первому варианту осуществления.
Фиг. 2 - схема, показывающая внутреннюю конфигурацию транспортного средства, когда ветровое стекло рассматривается из положения сиденья водителя в транспортном средстве с помощью при вождении.
Фиг. 3 - увеличенный вид, показывающий оперируемые водителем переключатели, которые предусмотрены на рулевом колесе транспортного средства с помощью при вождении.
Фиг. 4 - это блок-схема управления, показывающая конфигурацию контроллера перехода режима блока управления ADAS.
Фиг. 5 - это блок-схема, показывающая последовательность операций процесса управления для переключения режимов помощи при вождении, который выполняется контроллером перехода режима, предусмотренным в блоке управления ADAS.
Фиг. 6 - это чертеж, показывающий примеры отображения дисплея, когда происходят следующие переходы между режимами: режим свободных рук → ручной режим → режим оперирования рулевым колесом → режим деактивации помощи рулевого колеса.
Фиг. 7 - пояснительная схема операции, показывающая операцию управления переходом в режим помощи при вождении в сценарии передвижения, в котором транспортное средство в режиме свободных рук продвигается к месту сбора дорожной пошлины на главной дороге.
Фиг. 8 - пояснительная схема операции, показывающая операцию управления переходом в режим помощи при вождении в сценарии передвижения, в котором транспортное средство в режиме свободных рук продвигается к искривлению и месту сбора дорожной пошлины на главной дороге.
Фиг. 9 - пояснительная схема операции, показывающая операцию управления переходом в режим помощи при вождении в сценарии передвижения, в котором транспортное средство в режиме свободных рук продвигается к месту сбора дорожной пошлины на ответвляющейся дороге.
Фиг. 10 - пояснительная схема операции, показывающая операцию управления переходом в режим помощи при вождении в сценарии передвижения, в котором транспортное средство в режиме свободных рук продвигается к искривлению и месту сбора дорожной пошлины на ответвляющейся дороге.
СПОСОБ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0009] Режим для выполнения способа помощи при вождении и устройства помощи при вождении согласно настоящему раскрытию будет описан ниже на основе первого варианта осуществления, показанного на чертежах.
Первый вариант
[0010] Способ помощи при вождении и устройство помощи при вождении в первом варианте осуществления были применены к транспортному средству с помощью при вождении, в котором была установлена усовершенствованная система помощи водителю (ADAS), которая помогает при операциях вождения, осуществляемых водителем. Конфигурация первого варианта осуществления будет разделена на «общую конфигурацию системы», «конфигурацию блока управления контроллера перехода режима» и «конфигурацию процесса управления для переключения режима помощи при вождении» для описания.
[Общая конфигурация системы]
На фиг. 1 показана усовершенствованная система помощи водителю, к которой применены способ помощи при вождении и устройство помощи при вождении согласно первому варианту осуществления. На фиг. 2 показана внутренняя конфигурация транспортного средства, когда ветровое стекло рассматривается с места водителя в транспортном средстве с помощью при вождении. На фиг. 3 показаны оперируемые водителем переключатели операций, обеспеченные на рулевом колесе транспортного средства с помощью при вождении. Общая конфигурация системы будет описана ниже на основе фиг. 1-3.
[0012] Усовершенствованная система помощи водителю (ADAS) представляет собой систему, которая включает в себя функцию управления скоростью/продвижением транспортного средства, функцию удержания полосы движения и функцию помощи при передвижении по маршруту. Как показано на фиг. 1, ADAS снабжена бортовыми датчиками 1, блоком 2 хранения картографических данных, блоком 3 сообщения внешних данных, блоком 4 управления ADAS, исполнительным механизмом 5, устройством HMI 6, навигационной системой 7, переключателями 8 операций и датчиками 9 информации управления. «HMI» - это сокращение от «человеко-машинного интерфейса».
[0013] Бортовые датчики 1 имеют камеру 11, радар 12, GPS 13 и бортовой блок 14 сообщения данных. Информация датчиков, захваченная бортовыми датчиками 1, выводится на блок 4 управления ADAS.
[0014] Камера 11 представляет собой датчик распознавания окружений главного транспортного средства, который выполняет функцию захвата информации об окружениях главного транспортного средства, таких как текущая полоса движения, соседние полосы движения, транспортные средства, окружающие главное транспортное средство, и пешеходы вокруг главного транспортного средства, из данных изображения. Камера 11 объединяет в себе камеру распознавания вперед, камеру распознавания сзади, камеру распознавания вправо, камеру распознавания влево и т.п. и сконфигурирована так, чтобы иметь функцию монитора кругового обзора. Объекты на пути передвижения главного транспортного средства, полосы движения, объекты за пределами пути передвижения главного транспортного средства (конструкции проезжей части, впереди идущие транспортные средства, буксируемые транспортные средства, встречные транспортные средства, окружающие транспортные средства, пешеходы, велосипеды и мотоциклы), путь передвижения главного транспортного средства (белые линии проезжей части, границы проезжей части, стоп-линии и пешеходные переходы), дорожные знаки (ограничения скорости) и т.п. считываются этой камерой 11.
[0015] Радар 12 является датчиком дальности, который выполняет функцию считывания того, присутствуют ли объекты в окружениях главного транспортного средства, и функцию считывания расстояния до объекта в окружениях главного транспортного средства. Здесь «радар 12» - это общий термин, обозначающий радар, использующий радиоволны; лидар, использующий свет; и сонар, использующий ультразвуковые волны. Позиции объектов на пути передвижения главного транспортного средства, объектов за пределами пути передвижения главного транспортного средства (конструкции проезжей части, впереди идущие транспортные средства, буксируемые транспортные средства, встречные транспортные средства, окружающие транспортные средства, пешеходы, велосипеды и мотоциклы) и т. д., а также расстояния до объектов считываются этим радаром 12.
[0016] GPS 13 включает в себя антенну GNSS и является датчиком позиции главного транспортного средства, который считывает позицию (широту и долготу) остановленного или передвигающегося главного транспортного средства посредством использования спутниковой связи. «GNSS» - это сокращение от «global navigation satellite system» («глобальная навигационная спутниковая система»), а «GPS» - это сокращение от «Global Positioning System» («глобальная система позиционирования»).
[0017] Бортовой блок 14 сообщения данных представляет собой внешний датчик данных, с помощью которого информация, которая не может быть захвачена бортовыми датчиками 1 или из картографических данных, захватывается извне посредством беспроводной связи блоком 3 сообщения внешних данных через приемопередающие антенны 3а, 14а. Здесь, если «блок 3 сообщения внешних данных» является, например, блоком сообщения данных, установленным в другом транспортном средстве, передвигающемся рядом с главным транспортным средством, связь транспортное средство - транспортное средство может осуществляться между главным транспортным средством и другим транспортным средством, и информация, требуемая главным транспортным средством может быть захвачена через запросы разнообразной информации, хранящейся на другом транспортном средстве. Более того, если «блок 3 сообщения внешних данных» является, например, блоком сообщения данных, предусмотренным на объекте инфраструктуры, сообщение инфраструктуры может выполняться между главным транспортным средством и объектом инфраструктуры, и информация, требуемая главным транспортным средством, может быть захвачена посредством запросов. Например, если есть информация, отсутствующая в картографических данных, сохраненных в блоке 2 хранения картографических данных, или информация, которая была изменена из картографических данных, отсутствующая или измененная информация может быть дополнена. Также можно захватывать информацию о дорожном движении, такую как информацию о пробках на маршруте передвижения главного транспортного средства или информацию о регулировке передвижения.
[0018] Блок 2 хранения картографических данных сконфигурирован из бортовой памяти, в которой хранятся так называемые электронные картографические данные, с которыми связаны информация о широте/долготе и карте. Картографические данные, хранящиеся в блоке 2 хранения картографических данных, представляют собой картографические данные высокой точности с уровнем точности, который принципиально позволяет распознавать полосы движения, за исключением географических областей, для которых нет картографических данных высокой точности. Когда позиция главного транспортного средства, считанная GPS 13, распознается блоком 4 управления ADAS, высокоточные картографические данные для предписанного диапазона с центром в позиции главного транспортного средства отправляются в блок управления 4 ADAS и систему 7 навигации.
[0019] Здесь «высокоточные картографические данные» содержат информацию проезжей части, связанную с географическими точками, и информация проезжей части определяется узлами и связями, которые соединяют узлы. Информация проезжей части включает в себя информацию, которая указывает дороги по позициям или участкам проезжих частей, и информацию о типах проезжей части каждой проезжей части, ширинах полос движения каждой проезжей части и формах проезжих частей. Информация проезжей части сохраняется так, что позиции перекрестков, направления въезда на перекрестки, типы перекрестков и другая информация, относящаяся к перекресткам, связана с каждым набором идентифицирующей информации о связях проезжей части. Кроме того, информация проезжей части сохраняется, так что типы проезжей части, ширины полосы движения, формы проезжей части, возможно ли прямое движение или нет, отношения приоритета продвижения, возможен ли обгон (можно ли входить на соседние полосы движения), ограничения скорости, знаки и другая информация, относящаяся к проезжим частям, связаны с каждым набором идентифицирующей информации о связях проезжей части.
[0020] Блок 4 управления ADAS представляет собой блок, который объединяет управление помощью при вождении и имеет контроллер 41 акселератора/тормоза, контроллер 42 источника привода передвижения и контроллер 43 тормоза в качестве контроллеров, которые совместно используют функцию управления скоростью/продвижением транспортного средства. Блок 4 управления ADAS также имеет контроллер 44 помощи рулевого колеса и контроллер 45 руления в качестве контроллеров, которые совместно выполняют функцию удержания полосы движения. Кроме того, в случае усовершенствованной системы помощи водителю (ADAS) блок 4 управления ADAS имеет контроллер 46 HMI в качестве контроллера, который совместно использует функцию обеспечения сообщения между водителем и системой. Кроме того, в случае усовершенствованной системы помощи водителю (ADAS) блок 4 управления ADAS имеет контроллер 47 перехода режима, который управляет переключением режимов помощи при вождении вместе с повышением уровня помощи при вождении до режима помощи при вождении на основании того, что водитель убирает руки с рулевого колеса.
[0021] Контроллер 41 акселератора/тормоза выполняет следующее управление, чтобы помогать водителю с операцией акселератора и операцией тормоза.
(a) Когда обнаруживается впереди идущее транспортное средство, продвижение управляется так, что скорость транспортного средства, установленная водителем, принималась в качестве верхнего предела, а расстояние продвижения, соответствующее скорости транспортного средства, поддерживалось.
(b) Если впереди идущее транспортное средство не обнаружено, транспортное средство передвигается неуклонно с установленной скоростью.
(c) Когда впереди идущее транспортное средство остановилось, главное транспортное средство также останавливается после впереди идущего транспортного средства.
(d) Когда впереди идущее транспортное средство продвинулось вперед, остановленное состояние прекращается, и последующее передвижение возобновляется, если нажат переключатель 82 возобновления/ускорения (см. фиг. 3) или выжата педаль акселератора.
(e) Когда главное транспортное средство остановилось под действием функции управления скоростью/продвижением транспортного средства, электрический стояночный тормоз активируется по команде на электрический привод 53 стояночного тормоза, если выполняется операция разблокировки системы.
[0022] В дополнение к управлению скоростью/продвижением транспортного средства на основе вышеуказанных пунктов (а)-(е), обычно известному как «круиз-контроль», контроллер 41 помощи акселератора/тормоза выполняет управление, описанное ниже.
(f) Когда главное транспортное средство передвигается под управлением функции управления скоростью/продвижением транспортного средства, изменение (повышение или понижение) установленной скорости транспортного средства с помощью операции переключателей водителем разрешено.
(g) Если новое ограничение скорости было обнаружено функцией считывания знака ограничения скорости, дисплей помощи при ограничении скорости мигает, на дисплее отображается «установленная скорость транспортного средства была изменена», и установленная скорость транспортного средства должна отражать обнаруженное ограничение скорости. Однако ограничение скорости не отражается в установленной скорости в тех случаях, когда установленная скорость транспортного средства была установлена на скорость выше, чем ограничение скорости, с помощью операции переключателей водителем, а затем установленная скорость транспортного средства не была превышена, даже если ограничение скорости увеличилось (помощь при ограничении скорости).
(h) Когда главное транспортное средство передвигается под управлением функции управления скоростью/продвижением транспортного средства, ускорение разрешается, если педаль акселератора выжата, когда водитель желает временно ускориться. Управление тормозом, предупреждения о приближении и предупреждения о кривизне не выдаются, когда оперируют педалью акселератора и происходит ускорение. Если педаль акселератора отпущена, восстанавливается прежнее управление скоростью/продвижением транспортного средства.
(i) Когда главное транспортное средство передвигается под управлением функции управления скоростью/продвижением транспортного средства, замедление разрешается, если педаль тормоза выжата, когда водитель желает временно замедлиться. Когда водитель желает вернуться к установленной скорости транспортного средства, которая действовала до замедления, нажимается переключатель 82 возобновления/ускорения (см. Фиг. 3).
(j) При передвижении по искривленной дороге скорость транспортного средства управляется таким образом, чтобы транспортное средство могло передвигаться со скоростью, соответствующей размеру искривлений впереди, на основе картографической информации (координированное по искривлению замедление). Эта функция координированного по искривлению замедления представляет собой функцию, которая использует информацию о кривизне, захваченную из высокоточных картографических данных или навигационной системы, и определяет верхний предел целевой скорости, чтобы поперечное ускорение было на заданном значении или ниже. В частности, функция координированного по искривлению замедления выполняет обратное вычисление на основе кривизны и позиции искривления, так что боковое ускорение будет на заданном значении или ниже, чтобы начать замедление перед искривлением, и транспортное средство передвигается в состоянии, в котором замедление на каждой проезжей части завершено. В это время целевое ускорение для координированного по искривлению замедления в «режиме операции рулевого колеса» делается ниже целевого ускорения для координированного по искривлению замедления в «ручном режиме», «режиме свободных рук» и «режиме деактивации помощи рулевого колеса».
[0023] Если целевая скорость транспортного средства генерируется контроллером 41 помощи акселератора/тормоза, контроллер 42 источника привода передвижения выполняет продольное управление, при котором значение команды передвижения вычисляется и выводится на привод 51 вождения, так что фактическая скорость транспортного средства для главного транспортного средства достигнет целевой скорости транспортного средства.
[0024] Если целевое замедление торможения генерируется контроллером 41 помощи акселератора/тормоза, контроллер 43 тормоза выполняет продольное управление, при котором значение команды торможения вычисляется и выводится на привод 52 тормоза, так что фактическое замедление торможения главного транспортного средства достигнет целевого замедления торможения.
[0025] Контроллер 44 помощи рулевого колеса выполняет функцию удержания полосы движения, при которой выполняется рулевое управление (поперечное управление) и осуществляется помощь водителю с операцией руления, так что главное транспортное средство передвигается в центральной части полосы движения на основе обнаружения маркеров полосы движения с обеих сторон полосы движения камерой распознавания вперед. Этот контроллер 44 помощи рулевого колеса имеет, в дополнение к функции удержания полосы движения, функцию помощи при передвижении по маршруту, которая включает в себя в качестве условия, что передвижение с удержанием полосы движения выполняется по маршруту передвижения, сгенерированному заранее, если водитель установил пункт назначения в согласование с навигационной системой 7. Если достигнута начальная точка смены полосы движения, необходимая для передвижения по маршруту передвижения, функция помощи при передвижении по маршруту использует дисплей для подтверждения водителем, будет ли выполнено изменение полосы движения, и, в случае, когда водитель выполнил операцию переключения, помогает при смене полосы движения посредством рулевого управления.
[0026] Если целевой угол руления генерируется контроллером 44 помощи рулевого колеса для главного транспортного средства, чтобы передвигаться по центральному участку полосы движения, контроллер 45 руления выполняет поперечное управление, при котором значение команды угла руления вычисляется и выводится в привод 54 угла руления, так что фактический угол руления главного транспортного средства достигнет целевого угла руления.
[0027] Контроллер 46 HMI генерирует команду отображения на дисплей 61 на лобовом стекле и дисплей 62 измерителя, так что рабочие состояния функции управления скоростью/продвижением транспортного средства и функции удержания полосы движения, а также изменения в этих рабочих состояниях могут быть распознаны визуально. Например, когда должны отображаться «режим свободных рук», «ручной режим», «режим операции рулевого колеса» и «режим деактивации помощи рулевого колеса», отображение, различающее режимы по цвету, отображение значков или отображение сообщений используются, чтобы водитель мог с первого взгляда оценить рабочее состояние. Кроме того, аудио сигнал в динамик 63 генерируется, когда объявление водителю, которое обращается к слуховому восприятию, становится необходимым, и генерируется команда активации/остановки для сигнального устройства 64, когда предупреждение для водителя, которое обращается к слуховому восприятию, становится необходимым.
[0028] Здесь дисплей 61 на лобовом стекле устройства 6 HMI установлен в нижней позиции на лобовом стекле 21, как показано на фиг. 2, и дисплей 61 на лобовом стекле отображает состояния системы и т.п. на лобовом стекле с помощью осветительной аппаратуры. Дисплей 62 измерителя установлен в блоке отображения измерительного прибора приборной панели 22 и отображает рабочие состояния системы, состояния ближайшего транспортного средства и т.п. Динамик 63 и сигнальное устройство 64 установлены в предписанных позициях на внутренней стороне панели приборной панели 22.
[0029] Во время передвижения с удержанием полосы движения, в котором был выбран режим свободных рук, контроллер 47 перехода режима может обнаруживать участок исчезновения полосы движения, в котором нельзя распознать ни одну полосу движения, которая продолжается от текущей полосы движения, вдоль продолжения маршрута передвижения главного транспортного средства. Если обнаруживается участок исчезновения полосы движения, захватывается информация о начальной точке исчезновения полосы движения, и первая позиция и вторая позиция устанавливаются между позицией главного транспортного средства и начальной точкой исчезновения полосы движения. Если главное транспортное средство достигает первой позиции, запрашивается переход режима из режима свободных рук в ручной режим. Если главное транспортное средство достигает второй позиции, запрашивается переход режима из ручного режима в режим работы операции рулевого колеса. Если захват рулевого колеса водителем подтвержден, выполняется переход режима из режима операции рулевого колеса в режим деактивации помощи рулевого колеса до того, как главное транспортное средство достигнет начальной точки исчезновения полосы движения.
[0030] Здесь «режим свободных рук» обозначает режим помощи при вождении, который позволяет водителю убирать свои руки с рулевого колеса 23. «Ручной режим» обозначает режим помощи при вождении, который включает в себя как условие, что руки водителя на рулевом колесе 23. «Режим операции рулевого колеса» означает режим помощи при вождении, который побуждает водителя оперировать рулевым колесом. «Режим деактивации помощи рулевого колеса» обозначает режим помощи при вождении, в котором функция удержания полосы движения деактивирована. То есть, «режим свободных рук», «ручной режим» и «режим операции рулевого колеса» - это режимы, которые отличаются только тем, что они являются режимом, в котором водителю разрешено убирать руки с рулевого колеса 23, a режим, в котором водителю требуется держать свои руки на рулевом колесе 23, или режим, в котором водителю требуется оперировать рулевым колесом 23 своими руками, и не являются режимами, в которых изменяется управление помощи при вождении. С другой стороны, «режим деактивации помощи рулевого колеса» - это режим, в котором функция удержания полосы движения контроллера 44 помощи рулевого колеса деактивируется, в то время как функция управления скоростью/продвижением транспортного средства контроллера 41 помощи акселератора/тормоза поддерживается. Другими словами «режим деактивации помощи рулевого колеса» - это режим, в котором оперирование рулевым колесом передается от системы водителю.
[0031] Навигационная система 7 объединяет картографические данные, хранящиеся в блоке 2 хранения картографических данных, с GPS 13, который использует спутниковую связь, и, если пункт назначения установлен, генерирует маршрут передвижения от текущей позиции главного транспортного средства до пункта назначения и направляет главное транспортное средство к пункту назначения. Когда маршрут передвижения сгенерирован, экран карты проезжей части отображается вместе с маршрутом передвижения и значком главного транспортного средства на дисплее 71 навигации. Дисплей 71 навигации расположен в верхней центральной позиции на приборной панели 22, как показано на фиг. 2, и имеет функцию для установки пункта назначения с помощью операций касания или тому подобного, выполняемых водителем.
[0032] Как показано на фиг. 2, переключатели 8 операций установлены в позицию на ступице рулевого управления, которая связывает обод рулевого колеса и вал рулевого колеса 23, где ими можно управлять пальцами, пока водитель все еще держит обод рулевого колеса. Переключатели 8 операций имеют главный переключатель 81, переключатель 82 возобновления/ускорения, переключатель 83 установки/выбега, переключатель 84 отмены, переключатель 85 регулировки продвижения и переключатель 86 помощи при смене полосы движения. Главный выключатель 81 представляет собой переключатель для включения или выключения системы. Переключатель 82 возобновления/ускорения имеет функцию повторной активации после деактивации на установленной скорости транспортного средства, которая действовала до деактивации, функцию повышения установленной скорости транспортного средства и функцию возобновления продвижения вперед после остановки главного транспортного средства, чтобы следовать за впереди идущим транспортным средством. Переключатель 83 установки/выбега имеет функцию активации при скорости передвигающегося транспортного средства и функцию снижения установленной скорости транспортного средства. Переключатель 84 отмены является переключателем, который отменяет активацию. Переключатель 85 регулировки продвижения представляет собой переключатель, который переключает между установленными настройками продвижения. Переключатель 86 помощи при смене полосы движения представляет собой переключатель, который выдает инструкцию на начало смены полосы движения, когда система подтвердила начало смены полосы движения водителем.
[0033] Здесь, после нажатия главного переключателя 81, если транспортное средство ускоряется или замедляется до желаемой установленной скорости транспортного средства и нажат переключатель 83 установки/выбега, ограничение скорости проезжей части, по которому передвигаются, используется в качестве установленной скорости транспортного средства, и управление помощью при вождении блоком 4 управления ADAS активируется. Если ограничение скорости не было обнаружено для проезжей части, по которому передвигаются, или, если помощь при ограничении скорости была отключена, скорость при нажатии переключателя 83 установки/выбега будет использоваться в качестве установленной скорости транспортного средства, и активируется управление помощью при вождении блоком 4 управления ADAS.
[0034] Управление помощью при вождении блоком 4 управления ADAS деактивируется при нажатии переключателя 84 отмены, при нажатии главного переключателя 81 или при выжатой педали тормоза (если главное транспортное средство не было остановлено функцией управления скоростью/продвижением транспортного средства).
[0035] Датчики 9 информации управления захватывают информацию, необходимую для выполнения управления помощью при вождении посредством блока 4 управления ADAS. Как показано на фиг. 2, датчики 9 информации управления имеют камеру 91 монитора водителя, датчик 92 касания, датчик 94 сиденья и переключатель 95 пряжки ремня безопасности. Кроме того, как показано на фиг. 1, датчики информации управления имеют датчик 93 крутящего момента, датчик 96 скорости транспортного средства и датчик 97 позиции акселератора.
[0036] Камера 91 монитора водителя установлена так, что объектив камеры обращен к водителю, и контролирует взгляд вперед водителя (ориентацию лица и то, открыты или закрыты его глаза). Датчик 92 касания (емкостной датчик) установлен на ободе рулевого колеса упомянутого рулевого колеса 23, куда водитель кладет свои руки, и обнаруживает, держит ли водитель руки на рулевом колесе 23. Датчик 93 крутящего момента установлен в блоке передачи усилия руления механизма руления и обнаруживает, добавляет ли водитель крутящий момент руления для оперирования рулевым колесом. Датчик 94 сиденья (датчик веса) установлен в подушке 24 сиденья водительского сиденья и обнаруживает, сидит ли водитель. Переключатель 95 пряжки ремня безопасности обнаруживает, заблокирован ли ремень безопасности. Датчик 96 скорости транспортного средства обнаруживает фактическую скорость транспортного средства упомянутого главного транспортного средства. Датчик 97 позиции акселератора обнаруживает нажатие педали акселератора, когда водитель выполнил операцию акселератора.
[0037] [Конфигурация блока управления контроллера перехода режима]
Конфигурация блока управления контроллера 47 перехода режима описана ниже на основе фиг. 4, на которой показан контроллер 47 перехода режима блока 4 управления ADAS.
[0038] Как показано на фиг. 4, контроллер 47 перехода режима имеет блок 471 обнаружения участка исчезновения полосы движения, блок 472 установки позиции, блок 473 запроса перехода в ручной режим, блок 474 запроса перехода в режим операции рулевого колеса, и блок 475 перехода в режим деактивации помощи рулевого колеса. Контроллер 47 перехода режима также имеет блок 476 запроса перехода в ручной режим и блок 477 перехода в режим свободных рук.
[0039] Блок 471 обнаружения участка исчезновения полосы движения обнаруживает участок исчезновения полосы движения, на котором нельзя распознать ни одну полосу движения, которая продолжается от текущей полосы движения, вдоль продолжения маршрута передвижения главного транспортного средства во время передвижения с удержанием полосы движения, в котором выбран «режим M1 свободных рук». Здесь «участок исчезновения полосы движения» означает, среди прочего, следующие местоположения.
(а) Выходы: местоположения, где нет картографических данных, основанных на такой информации, как атрибуты полосы движения, центральные линии и т.д. В частности, этим термином обозначаются съезды с автомагистралей, зоны обслуживания, парковки и т.д.
(b) Места сбора дорожной пошлины: местоположения, где есть картографические данные и информация об отсутствии полос движения.
(c) Бесполосные сегменты (бесполосное увеличение, бесполосное уменьшение): местоположения, где есть картографические данные и информация об отсутствии полос.
(d) Слияния: местоположения, где есть картографические данные и есть информация, указывающая на то, что текущая полоса исчезнет из-за слияния.
(e) Полоса уменьшается: местоположения, где есть картографические данные и информация, указывающая, что текущая полоса исчезнет из-за уменьшения полосы.
[0040] Если участок исчезновения полосы движения обнаружен, блок 472 установки позиции захватывает информацию о начальной точке исчезновения полосы движения и устанавливает первую позицию (позицию, близкую к ведущему транспортному средству) и вторую позицию (позицию, удаленную от главного транспортного средства) между позицией главного транспортного средства и начальной точкой исчезновения полосы движения.
[0041] Если главное транспортное средство достигает первой позиции, блок 473 запроса перехода в ручной режим запрашивает переход режима из «режима M1 свободных рук» в «ручной режим M2». Здесь установка первой позиции различается в зависимости от того, не требует ли проезжая часть, чтобы главное транспортное средство сменило полосу движения, или проезжая часть действительно требует смены полосы движения.
[0042] Запрос на переход режима в «ручной режим M2» выполняется путем изменения отображения посредством цветового дифференцирования, значков и сообщений на дисплеях 61, 62 и объявления «пожалуйста, держите рулевое колесо». Переход режима в «ручной режим M2» подтверждается путем отслеживания сигнала датчика от датчика 92 касания. Кроме того, независимо от запроса перехода режима в «ручной режим M2», если невозможно обнаружить, что водитель держит рулевое колесо в течение заданного промежутка времени, действие (продольное управление + поперечное управление) управления помощью при вождении деактивируется после того, как главное транспортное средство было замедлено и остановлено.
[0043] Если главное транспортное средство достигает второй позиции, блок 474 запроса перехода в режим операции рулевого колеса запрашивает переход режима из «ручного режима M2» в «режим M3 операции рулевого колеса». Здесь при установке второй позиции исходная точка для расстояния позиционирования изменяется в зависимости от того, присутствует ли искривление с заданным радиусом поворота или меньше перед участком исчезновения полосы движения.
[0044] Запрос на переход режима в «режим M3 операции рулевого колеса» выполняется путем изменения отображения цветового различия, значков и сообщений на дисплеях 61, 62 и объявления «пожалуйста, действуйте». Переход режима в «режим М3 операции рулевого колеса» подтверждается путем отслеживания сигнала датчика от датчика 93 крутящего момента. Кроме того, независимо от запроса перехода режима в «режим M3 операции рулевого колеса», если невозможно обнаружить операцию водителя на рулевом колесе даже после ожидания заданного периода времени, действие (продольное управление + поперечное управление) управления помощью при вождении деактивируется после того, как главное транспортное средство было замедлено и остановлено.
[0045] Если главное транспортное средство достигает начальной точки исчезновения полосы движения, блок 475 перехода режима деактивации помощи рулевого колеса выполняет переход режима из «режима M3 операции рулевого колеса» в «режим M4 деактивации помощи рулевого колеса». Если происходит переход режима в «режим M4 деактивации помощи рулевого колеса», отображение цветового различия, значков и сообщений на дисплеях 61, 62 изменяется. Такое же условие достижения начальной точки исчезновения полосы движения применяется как условие для перехода режима к «режиму M4 деактивации помощи рулевого колеса», независимо от установки первой позиции и второй позиции.
[0046] Что касается блока 476 запроса перехода в ручной режим, главное транспортное средство с выбранным «режимом M4 деактивации помощи рулевого колеса» проходит через участок исчезновения полосы движения, чтобы достичь конечной точки исчезновения полосы движения, и распознавание полосы движения возобновляется. Поскольку начало бокового управления для помощи водителю в операции рулевого колеса стало возможным благодаря возобновлению распознавания полосы движения, выполняется переход режима с «режима M4 деактивации помощи рулевого колеса» на «ручной режим M2». Здесь переход режима к «ручному режиму M2» выполняется путем запуска бокового управления и изменения отображения цветового различия, значков и сообщений на дисплеях 61, 62. Когда выбран «режим M4 деактивации помощи рулевого колеса», водитель держит рулевое колесо для выполнения операций руления. Таким образом, переход режима из «режима M4 деактивации помощи рулевого колеса» в «режим M3 операции рулевого колеса» опускается.
[0047] Когда условия выбора режима свободных рук выполняются во время передвижения с удержанием полосы движения в «ручном режиме M2», блок 477 перехода в режим свободных рук выполняет переход режима из «ручного режима M2» в «режим M1 свободных рук». Здесь переход режима в «режим M1 свободных рук», в котором руки могут быть сняты с рулевого колеса, выполняется путем изменения отображения цветового различия, значков и сообщений на дисплеях 61, 62. Множественные условия накладываются как условия свободных рук для выбора «режима M1 свободных рук», например, «транспортное средство передвигается со скоростью транспортного средства, равной или ниже ограничения скорости», «водитель держит рулевое колесо 23», «педаль акселератора не выжата» и тому подобное.
[0048] [Конфигурация процесса управления для переключения режимов помощи при вождении]
Ниже поэтапная конфигурация управления для переключения режимов помощи при вождении будет объяснена на основе фиг. 5, которая показывает последовательность процесса управления для переключения режимов помощи при вождении, который выполняется контроллером 47 перехода режима, предусмотренным в блоке 4 управления ADAS. Этот процесс начинается с активации управления помощью при вождении и заканчивается, если управление помощью при вождении деактивируется.
[0049] На этапе S1, после запуска или определения на этапе S6, что условия деактивации для управления помощью при вождении не были выполнены, выполняется определение того, является ли режим помощи при вождении «режимом M4 деактивации помощи рулевого колеса». В случае ДА (режим - это «режим M4 деактивации помощи рулевого колеса») процесс переходит к этапу S32, а в случае НЕТ (режим не является «режимом M4 деактивации помощи рулевого колеса») процесс продолжается до этапа S2.
[0050] На этапе S2, после определения на этапе S1, что режим не является «режимом M4 деактивации помощи рулевого колеса», выполняется определение, является ли режим помощи при вождении «режимом M1 свободных рук». В случае ДА (режим - это «режим M1 свободных рук») процесс переходит к этапу S7, а в случае НЕТ (режим не является «режимом M1 свободных рук») процесс переходит к этапу S3.
[0051] На этапе S3, после определения на этапе S2, что режим не является «режимом M1 свободных рук», выполняется определение того, является ли режим помощи при вождении «ручным режимом M2». В случае ДА (режим - это «ручной режим M2») процесс переходит к этапу S4, а в случае НЕТ (режим не является «ручным режимом M2») процесс переходит к этапу S6.
[0052] На этапе S4, после определения на этапе S3, что режим является «ручным режимом M2», выполняется определение того, существуют ли условия деактивации для переключения с «ручного режима M2» на «режим M1 свободных рук». В случае ДА (условия свободных рук выполнены) процесс переходит к этапу S5, а в случае НЕТ (условия свободных рук не выполнены) процесс переходит к этапу S6.
[0053] На этапе S5, после определения на S4, что условия свободных рук выполнены, выполняется переход режима из «ручного режима M2» в «режим M1 свободных рук», и процесс переходит к этапу S6.
[0054] На этапе S6, после перехода режима в «режим M1 свободных рук» на этапе S5, перехода режима в «ручной режим M2» на этапе S34, перехода режима в «режим M4 деактивации помощи рулевого колеса» на этапе S21 или определения НЕТ на этапах S3, S7 или S32, выполняется определение того, были ли выполнены условия для деактивации управления помощью при вождении. В случае ДА (условия деактивации выполнены) процесс продолжается до конца, а в случае НЕТ (условия деактивации не выполнены) процесс возвращается к этапу S1.
[0055] На этапе S7, после определения на этапе 2, что режим является «режимом M1 свободных рук», выполняется определение того, был ли участок S исчезновения полосы движения, в котором полоса движения, которая продолжается от текущей полосы движения, не может быть распознана, обнаружен на продолжении маршрута передвижения главного транспортного средства. В случае ДА (обнаружен участок S исчезновения полосы движения) процесс переходит к этапу S8, а в случае НЕТ (участок S исчезновения полосы движения не обнаружен) процесс переходит к этапу S6.
[0056] На этапе S8, после определения того, что участок S исчезновения полосы движения был обнаружена на этапе S7, выполняется определение того, требуется ли смена полосы движения, когда предполагается, что основное транспортное средство будет передвигаться по маршруту передвижения в направлении участка S исчезновения полосы движения. В случае ДА (смена полосы движения не необходима) процесс переходит к этапу S9, а в случае НЕТ (необходима смена полосы движения) процесс переходит к этапу S10.
[0057] На этапе S9, после определения на этапе S8, что смена полосы движения не необходима, позиция на первом расстоянии X1 от начальной точки Ps1 исчезновения полосы движения устанавливается как первая позиция P1, и процесс переходит к этапу S11.
[0058] На этапе S10, после определения на этапе S8, что смена полосы движения необходима, начальная точка Pe1 смены полосы движения устанавливается как первая позиция P1, и процесс переходит к этапу S11. Другими словами, установка первой позиции P1 различается в зависимости от того, необходима ли смена полосы движения.
[0059] На этапе S11, после установки первой позиции P1 на этапе S9 или этапе S10, выполняется определение того, существует ли искривление C с радиусом поворота равным или ниже заданного значения перед участком S исчезновения полосы движения. В случае ДА (нет искривления C) процесс переходит к этапу S12, а в случае НЕТ (есть искривление C) процесс переходит к этапу S13.
[0060] На этапе S12, после определения на этапе S11, что нет искривления C, позиция на втором расстоянии X2, которое меньше, чем первое расстояние X1, от начальной точки Ps1 исчезновения полосы движения устанавливается как вторая позиция P2, и процесс переходит к этапу S14.
[0061] На этапе S13, после определения на этапе S11, что существует искривление C, позиция на втором расстоянии X2, которое меньше первого расстояния X1, от начальной точки Pc1 искривления устанавливается как вторая позиция P2, и процесс переходит к этапу S14. То есть установка второй позиции P2 отличается в зависимости от того, есть ли искривление C.
[0062] На этапе S14, после установки второй позиции P2 на этапе S12 или этапе S13, выполняется определение того, достигло ли главное транспортное средство второй позиции P1. В случае ДА (первая позиция P1 достигнута) процесс переходит к этапу S15, а в случае НЕТ (первая позиция P1 не достигнута) определение для этапа S14 повторяется.
[0063] На этапе S15, после определения на этапе S14, что первая позиция P1 была достигнута, запрашивается переход режима из «режима M1 свободных рук» в «ручной режим M2», и процесс переходит к этапу S16.
[0064] На этапе S16, после перехода режима к «ручному режиму M2» на этапе S15, выполняется определение того, захватил ли водитель рулевое колесо 23 в течение заданного промежутка времени с момента запроса для перехода режима в «ручной режим М2». В случае ДА (рулевое колесо было захвачено в течение заданного промежутка времени) процесс переходит к этапу S17, а в случае НЕТ (рулевое колесо не было захвачено в течение заданного промежутка времени) процесс продолжается к этапу S23.
[0065] На этапе S17, после определения на этапе S16, что рулевое колесо было захвачено в течение заданного промежутка времени, выполняется определение того, достигло ли главное транспортное средство второй позиции P2. В случае ДА (была достигнута вторая позиция P2) процесс переходит к этапу S18, а в случае НЕТ (вторая позиция P2 не была достигнута) определение для этапа S17 повторяется.
[0066] На этапе S18, после определения на этапе S17, что вторая позиция P2 была достигнута, запрашивается переход режима из «ручного режима M2» в «режим M3 операции рулевого колеса», и процесс переходит к этапу S19.
[0067] На этапе S19, после перехода режима в «режим M3 операции рулевого колеса» на этапе S18 или определения на этапе S22, что заданный промежуток времени не истек в M3, выполняется определение того, действительно ли главное транспортное средство достигло начальной точки Ps1 исчезновения полосы движения. В случае ДА (начальная точка Ps1 исчезновения полосы движения была достигнута) процесс переходит к этапу S21, а в случае НЕТ (начальная точка Ps1 исчезновения полосы движения не была достигнута) процесс переходит к этапу S20.
[0068] На этапе S20, после определения на этапе S19, что начальная точка Ps1 исчезновения полосы движения не была достигнута, выполняется определение того, выполнил ли водитель, удерживая рулевое колесо 23, операцию рулевого колеса. В случае ДА (операция рулевого колеса была выполнена) процесс переходит к этапу S21, а в случае НЕТ (операция рулевого колеса не была выполнена) процесс переходит к этапу S22.
[0069] На этапе S21, после определения на этапе S19, что была достигнута начальная точка Ps1 исчезновения полосы движения, или определения на этапе S20, что была выполнена операция рулевого колеса, выполняется переход состояния с «режима M3 операции рулевого колеса» на «режим M4 деактивации помощи рулевого колеса», и процесс переходит к этапу S6.
[0070] На этапе S22, после определения на этапе S20, что операция рулевого колеса не была выполнена, выполняется определение того, истек или нет заданный промежуток времени в «режиме M3 операции рулевого колеса». В случае ДА (заданный промежуток времени истек в M3) процесс переходит к этапу S23, а в случае НЕТ (заданный промежуток времени не истек в M3) процесс переходит к этапу S19.
[0071] На этапе S23, после определения на этапе S16, что рулевое колесо не было захвачено в течение заданного промежутка времени, или определения на этапе S22, что заданный промежуток времени не истек в M3, главное транспортное средство замедляется и останавливается, и процесс переходит к этапу S24. В это время на дисплеях 61, 62 отображается «замедление», и главное транспортное средство замедляется до остановки.
[0072] На этапе S24, после замедления и остановки главного транспортного средства на этапе S23, управление помощью при вождении (продольное управление + поперечное управление) деактивируется, и процесс продолжается до конца.
[0073] На этапе S32, после определения на этапе S1, что режим является «режимом M4 деактивации помощи рулевого колеса», выполняется определение того, прошло ли главное транспортное средство через участок S исчезновения полосы движения, чтобы достичь конечной точки Ps2 исчезновения полосы движения. В случае ДА (конечная точка Ps2 исчезновения полосы движения была достигнута) процесс переходит к этапу S33, а в случае НЕТ (конечная точка Ps2 исчезновения полосы движения не была достигнута) процесс переходит к этапу S6.
[0074] На этапе S33, после определения на этапе S32, что конечная точка Ps2 исчезновения полосы движения была достигнута, выполняется определение того, возобновлено ли распознавание полосы движения камерой распознавания вперед. В случае ДА (распознавание полосы движения возобновлено) процесс переходит к этапу S34, а в случае НЕТ (распознавание полосы движения не возобновлено) процесс переходит к этапу S6.
[0075] На этапе S34, после определения на этапе S33, что распознавание полосы движения было возобновлено, выполняется переход режима из «режима M4 деактивации помощи рулевого колеса» в «ручной режим M2», и процесс переходит к этапу S6.
[0076] Далее будут объяснены «предшествующая технология и меры для решения проблемы». Операция первого варианта осуществления будет разделена на «операцию процесса управления для переключения режимов помощи при вождении» и «операцию управления для переключения режимов помощи при вождении» для объяснения.
[0077] [Предшествующая технология и меры для решения проблемы]
Известно транспортное средство с помощью при вождении, которое включает в себя функцию управления скоростью/продвижением транспортного средства и функцию удержания полосы движения в качестве функций помощи при вождении для помощи водителю при операциях вождения, что включает в себя условие, при котором водитель держит руки на рулевом колесе, и который выполняет передвижение с удержанием полосы движения по одной полосе движения.
[0078] Это транспортное средство с помощью при вождении, имея в качестве условия, что водитель держит руки на рулевом колесе, постоянно дает водителю полномочии вождения. Возникла потребность в дополнительном повышении уровня помощи при вождении, передаче полномочий при вождении от водителя к системе и разрешении передвижения при автономном вождении, при котором руки водителя сняты с рулевого колеса.
[0079] Однако функция удержания полосы движения - это функция, которая, предполагая, что полоса движения главного транспортного средства распознается камерой распознавания вперед, удерживает главное транспортное средство в центральной части полосы движения. Следовательно, функция удержания полосы движения (функция для помощи в операции рулевого колеса системой) должна быть деактивирована, если существует участок исчезновения полосы движения, который является участком, в котором нельзя распознать ни одну полосу движения, продолжающуюся с текущей полосы, например в качестве места сбора дорожной пошлины на автомагистрали или т.п. на продолжении маршрута передвижения главного транспортного средства.
[0080] Таким образом, в случаях, когда уровень помощи при вождении был повышен так, что передвижение возможно, когда руки водителя не на рулевом колесе, падение уровня помощи при вождении увеличивается, если должен быть выполнен переход из режима с повышенным уровнем помощи при вождении в режим деактивации помощи рулевого колеса. Чтобы решить эту проблему, в патентной ссылке 1 (выложенная заявка на патент Японии №. H9-86223) аудио информация, указывающая, что «автоматическое руление будет деактивировано, будьте готовы», выдается из динамика, когда происходит переключение с автономного вождения на вождение с участием водителя, а автоматическое руление деактивируется, чтобы поручить управление водителю.
[0081] Следовательно, невозможно подтвердить, что водитель держит руки на рулевом колесе или что водитель держит рулевое колесо своими руками, чтобы поддерживать готовность к операции, просто уведомив водителя путем выдачи аудио информации. Так, например, существует опасность того, что автоматическое руление будет случайно отключено, пока руки водителя все еще не на рулевом колесе. То есть возникла проблема в том, что, когда полномочии для операции рулевого колес передаются от системы к водителю при переключении с автономного вождения на вождение с участием водителя, полномочии передаются сразу с одним только уведомлением, поэтому передача водителю идет некачественно.
[0082] Чтобы решить эту проблему, авторы настоящего изобретения сосредоточили внимание на следующем моменте: используя картографические данные и т.д., можно захватывать информацию, указывающую на то, что существует область, в которой помощь рулевого колеса должна быть деактивирована из-за невозможности распознать полосу движения, которая продолжается с текущей полосы движения. Заблаговременное определение участка, на котором должна быть деактивирована помощь рулевого колеса, позволяет создать сегмент свободного передвижения до того, как главное транспортное средство достигнет точки деактивации помощи рулевого колеса, и захват рулевого колеса водителем можно подтвердить в этом сегменте свободного передвижения.
[0083] Основываясь на этом центре внимания, в способе помощи при вождении согласно настоящему раскрытию было использовано следующее решение: участок S исчезновения полосы движения, в котором не может быть распознана никакая полоса движения, которая продолжается от текущей полосы движения, обнаруживается вдоль продолжения маршрута передвижения главного транспортного средства во время передвижения с удержанием полосы движения, в котором был выбран «режим M1 свободных рук». Если обнаруживается участок S исчезновения полосы движения, захватывается информация о начальной точке Ps1 исчезновения полосы движения, и позиции перехода режима (первая позиция P1 и вторая позиция P2) устанавливаются между позицией главного транспортного средства и начальной точкой исчезновения полосы движения. Если главное транспортное средство достигает позиции перехода режима, запрашивается переход режима из «режима M1 свободных рук» в режим захвата рулевого колеса («ручной режим M2» или «режим M3 операции рулевого колеса»). Если захват рулевого колеса 23 водителем подтвержден, выполняется переход режима из режима захвата рулевого колеса в «режим M4 деактивации помощи рулевого колеса» до того, как главное транспортное средство достигнет начальной точки Ps1 исчезновения полосы движения.
[0084] То есть участок S исчезновения полосы движения, на котором помощь рулевого колеса системой должна быть отключена, может быть определена заранее в сценарии, включающем в себя передвижение с удержанием полосы движения в «режиме M1 свободных рук», в котором повышен уровень помощи при вождении. Если участок S исчезновения полосы движения определен заранее, выполняется последовательное управление, в котором определяются точки перехода режима, и происходят переходы «режим M1 свободных рук» → «режим M2, M3 захвата рулевого колеса» → «режим M4 деактивации помощи рулевого колеса». Другими словами, уровень помощи при вождении понижается ступенчато, и захват рулевого колеса 23 водителем подтверждается в «режиме M2, M3 захвата рулевого колеса». Наконец, операция рулевого колеса передается от системы (управление помощью рулевого колеса) к ручной операции водителем.
[0085] Следовательно, можно более надежно выполнять передачу от системы к водителю за счет ступенчатого понижения уровня помощи при вождении, когда заранее известно, что помощь рулевого колеса будет деактивирована в сценарии передвижения с удержанием полосы движения в «режиме M1 свободных рук», в котором уровень помощи при вождении повышается.
[0086] В случаях, когда выполняется переход режима, не только ступенчато снижается уровень помощи при вождении, но в то же время отображение на дисплее 61 на лобовом стекле и дисплей 62 измерителя изменяется в поэтапным образом, и уведомление обеспечивается путем обращения к зрительному восприятию водителя и, посредством объявления, к слуховым ощущениям водителя. Это будет объяснено ниже на основе рисунка 6.
[0087] Во-первых, дисплей 61 на лобовом стекле и дисплей 62 измерителя имеют блок отображения значков рулевого колеса, блок отображения ограничения скорости, блок отображения установленной скорости транспортного средства, блок отображения сообщений, блок отображения полосы движения/главного транспортного средства, и т.п. Затем, когда выбран «режим M1 свободных рук», блок отображения значков рулевого колеса, например, отображается синим цветом и отображает только значок рулевого колеса, как показано на дисплее D1 на фиг. 6.
[0088] Затем, если переход режима выполняется из «режима M1 свободных рук» в «ручной режим M2», блок отображения значков рулевого колеса, например, отображается зеленым цветом и отображает значок, на котором рулевое колесо удерживается руками, как показано на дисплее D2 на фиг. 6. Затем на дисплее сообщений отображается и объявляется «пожалуйста, держитесь за рулевое колесо, впереди место оплаты дорожной пошлины».
[0089] Затем, если переход режима выполняется из «ручного режима M2» в «режим M3 операции рулевого колеса», блок отображения значка рулевого колеса, например, отображается красным цветом и отображает значок, в котором рулевое колесо удерживается руками, как показано на дисплее D3 на фиг. 6. Затем на дисплее сообщений отображается и объявляется «пожалуйста, действуйте, впереди платная площадка».
[0090] Наконец, если переход режима выполняется из «режима M3 операции рулевого колеса» в «режим M4 деактивации помощи рулевого колеса», блок отображения значка рулевого колеса, например, отображается белым цветом и отображает значок рулевого колеса и рук, как показано на дисплее D4 на фиг. 6.
[0091] Таким образом, в случаях, когда переход режима выполняется поэтапным образом от «режима M1 свободных рук» к «режиму M4 деактивации помощи рулевого колеса», водитель может быть уведомлен о переходе в режим помощи при вождении через изменяется в том, что отображается на дисплее 61 на лобовом стекле и индикаторе 62 измерителя.
[0092] [Операция процесса управления для переключения режимов помощи при вождении]
Операция процесса управления для переключения режимов помощи при вождении, который выполняется контроллером 47 перехода режима, поясняется ниже на основе блок-схемы, показанной на фиг. 5.
[0093] Во-первых, если активировано управление помощью при вождении, выбирается «ручной режим M2», поэтому процесс продолжается в порядке этап S1 → S2 → S3 → S4. На этапе S4 выполняется определение того, были ли выполнены условия свободных рук для переключения из «ручного режима M2» в «режим M1 свободных рук». Последовательность операций, выполняемых в порядке этап S1 → S2 → S3 → S4 → S6, повторяется до тех пор, пока не будет определено, что условия деактивации выполнены. Затем, если на этапе S4 определено, что условия автоматического деактивации были выполнены, процесс переходит с этапа S4 на S5, и выполняется переход режима из «ручного режима M2» в «режим M1 свободных рук» на этапе S5.
[0094] Во время движения с удержанием полосы движения, в котором был выбран «режим M1 свободных рук», процесс продолжается в порядке этап S1 → S2 → S7. На этапе S7 определяется, был ли обнаружен участок S исчезновения полосы движения, в котором не может быть распознана никакая полоса движения, которая продолжается от текущей полосы движения, вдоль продолжения маршрута движения главного транспортного средства. Последовательность операций, идущая в порядке этап S1 → S2 → S7 → S6, повторяется до тех пор, пока не обнаруживается участок S исчезновения полосы движения. Затем, если на этапе S7 определено, что участок S исчезновения полосы движения был обнаружен, процесс переходит с этапа S7 на этап S8, и на этапе S8 выполняется определение того, необходима ли смена полосы движения, предполагая, что главное транспортное средство будет двигаться по маршруту передвижения к участку S исчезновения полосы движения. Если на этапе S8 определено, что смена полосы движения не необходима, процесс переходит к этапу S9, а если на этапе S8 определено, что смена полосы движения необходима, процесс переходит к этапу S10. На этапе S9 позиция на первом расстоянии X1 от начальной точки Ps1 исчезновения полосы движения устанавливается как первая позиция P1, а на этапе S10 начальная точка Pe1 смены полосы движения устанавливается как первая позиция P1.
[0095] Затем на этапе S11 определяется, существует ли искривление C с радиусом поворота заданного значения или меньше перед участком S исчезновения полосы движения. В случаях, когда нет искривления C, процесс переходит от этапа S11 к этапу S12, а в случаях, когда есть искривление C, процесс переходит от этапа S11 к этапу S13. На этапе S12 позиция на втором расстоянии X2, которое меньше, чем первое расстояние X1, от начальной точки Ps1 исчезновения полосы движения устанавливается как вторая позиция P2. На этапе S13 позиция на втором расстоянии X2, которое меньше первого расстояния X1, от начальной точки Pc1 искривления устанавливается как вторая позиция P2.
[0096] Затем на этапе S14 определяется, достигло ли главное транспортное средство первой позиции P1, и процесс переходит к этапу S15, если первая позиция P1 была достигнута. На этапе S15 запрашивается переход режима из «режима M1 свободных рук» в «ручной режим M2». На этапе S16 выполняется определение того, было ли захвачено рулевое колесо в течение заданного промежутка времени. Если рулевое колесо было захвачено в течение заданного промежутка времени, процесс переходит к этапу S17, а если рулевое колесо не было захвачено в течение заданного промежутка времени, процесс переходит к этапу S23.
[0097] Затем на этапе S17 определяется, достигло ли главное транспортное средство второй позиции P2, и процесс переходит к этапу S18, если вторая позиция P2 была достигнута. На этапе S18 запрашивается переход режима из «ручного режима M2» в «режим M3 операции рулевого колеса». Затем на этапе S19 определяется, достигло ли главное транспортное средство начальной точки Ps1 исчезновения полосы движения. Если на этапе S19 определено, что начальная точка Ps1 исчезновения полосы движения была достигнута, процесс переходит к этапу S21. На этапе S21 выполняется переход режима из «режима M3 операции рулевого колеса» в «режим M4 деактивации помощи рулевого колеса», и процесс переходит к этапу S6.
[0098] Затем на этапе S20 определяется, была ли выполнена операция рулевого колеса. Если определено, что операция рулевого колеса была выполнена, процесс переходит к этапу S21. На этапе S21 выполняется переход режима из «режима M3 операции рулевого колеса» в «режим M4 деактивации помощи рулевого колеса», и процесс переходит к этапу S6.
[0099] С другой стороны, если на этапе S20 определено, что операция рулевого колеса не была выполнена, процесс переходит на этап S22. На этапе S22 определяется, истек ли заданный промежуток времени в M3. Если определено, что заданный промежуток времени не истек в «режиме M3 операции рулевого колеса», последовательность операций, выполняемых в порядке этап S19 → S20 → S22, повторяется. Если заданный промежуток времени истек в состоянии, в котором начальная точка Ps1 исчезновения полосы движения не была достигнута, и никакая операция рулевого управления не была выполнена, процесс переходит к этапу S23. На этапе S23 главное транспортное средство замедляется и останавливается, а на этапе S24 управление помощью при движении (продольное управление + поперечное управление) деактивируется, и управление помощью при движении заканчивается.
[0100] Если «режим M4 деактивации помощи рулевого колеса» выбран из-за перехода режима к «режиму M4 деактивации помощи рулевого колеса» на этапе S21, процесс переходит с этапа S21 на этап S6 → S1 → S32. На этапе S32 определяется, прошло ли ведущее транспортное средство через участок S исчезновения полосы движения и достигло ли конечной точки Ps2 исчезновения полосы движения. Последовательность операций этап S6 → S1 → S32 повторяется до тех пор, пока не будет достигнута конечная точка Ps2 исчезновения полосы движения, и сохраняется выбор «режима M4 деактивации помощи рулевого колеса». Если на этапе S32 определено, что конечная точка Ps2 исчезновения полосы движения была достигнута, процесс переходит к этапу S33.
[0101] На этапе S33 выполняется определение, возобновлено ли распознавание полосы движения камерой распознавания вперед. Затем, в случаях, когда распознавание полосы движения было возобновлено, процесс переходит с этапа S33 на этап S34. На этапе S34 выполняется переход режима от «режима M4 деактивации помощи рулевого колеса» к «ручному режиму M2», и процесс переходит к этапу S6. Затем процесс идет в порядке этап S1 → S2 → S3 → S4. Если на этапе S4 определено, что условия автоматической деактивации были выполнены, процесс переходит с этапа S4 на этап S5, выполняется переход режима из «ручного режима M2» в «режим M1 свободных рук» на этапе S5, и режим восстанавливается в «режим M1 свободных рук».
[0102] Таким образом, процесс управления переходом между режимами, продолжающийся «режим M1 свободных рук» → «ручной режим M2» → «режим M3 операции рулевого колеса» → «режим M4 деактивации помощи рулевого колеса», разделен на следующие случаи (a)-(d), которые отличаются установкой первой позиции P1 и второй позиции P2.
(a) Когда в смене полосы движения нет необходимости и нет искривления C, первая позиция P1 устанавливается на первое расстояние X1 от начальной точки Ps1 исчезновения полосы движения, а вторая позиция P2 устанавливается на позицию на втором расстоянии X2, которое меньше, чем первое расстояние X1, от начальной точки Ps1 исчезновения полосы движения.
(b) Когда в смене полосы движения нет необходимости и имеется искривление C, первая позиция P1 устанавливается на первое расстояние X1 от начальной точки Pc1 искривления, а вторая позиция P2 устанавливается на позицию на второе расстояние X2, что меньше первого расстояния X1 от начальной точки Pc1 искривления.
(c) Когда необходима смена полосы движения и нет искривления C, первая позиция P1 устанавливается на начальную точку Pe1 смены полосы движения, а вторая позиция P2 устанавливается на позицию на втором расстоянии X2 от начальной точки Ps1 исчезновения полосы движения.
(d) Когда необходима смена полосы движения и имеется искривление C, первая позиция P1 устанавливается на начальную точку Pe1 смены полосы движения, а вторая позиция P2 устанавливается на позицию на втором расстоянии X2 от начальной точки Pc1 искривления.
[0103] [Операция управления для переключения режимов помощи при вождении]
Операция управления для переключения режимов помощи при вождении при передвижении с удержанием полосы движения в направлении участка S исчезновения полосы движения на основе «режима M1 свободных рук» разделена ниже на четыре различных сценария передвижения для объяснения, соответствующих случаев (a)-(d ) выше.
[0104] (Сценарий передвижения без искривления/без необходимости смены полосы движения: Фиг. 7).
Когда в смене полосы движения нет необходимости и нет искривления C, первая позиция P1 устанавливается на позицию первого расстояния X1 (которое отличается в зависимости от ограничения скорости проезжей части и т. д., но может быть, например, около 800 м) от начальной точки Ps1 исчезновения полосы движения, как показано на фиг. 7. Вторая позиция P2 устанавливается в позицию второго расстояния X2 (которое отличается в зависимости от ограничения скорости проезжей части и т. д., но может составлять, например, около 150 м), которое меньше первого расстояния X1 от начальной точки Ps1 исчезновения полосы движения.
[0105] Место оплаты дорожной пошлины на главной дороге (участок S исчезновения полосы), в котором нельзя распознать ни одну полосу движения, которая продолжается от текущей полосы, будет считаться обнаруженной на продолжении маршрута передвижения главного транспортного средства на основе картографических данных с высокой точностью во время передвижения с удержанием полосы движения к месту оплаты дорожной пошлины в «режиме M1 свободных рук». В этом случае информация о начальной точке Ps1 исчезновения полосы движения и конечной точке Ps2 исчезновения полосы движения получается, если обнаружено место оплаты дорожной пошлины. Первая позиция P1 и вторая позиция P2, которые имеют начальную точку Ps1 исчезновения полосы движения в качестве точки отсчета, устанавливаются между позицией главного транспортного средства и начальной точкой Ps1 исчезновения полосы движения.
[0106] Если главное транспортное средство при передвижении с удержанием полосы движения с выбранным «режимом M1 свободных рук» достигает первой позиции P1 из позиции P0 обнаружения, происходит переход режима из «режима M1 свободных рук» в «ручной режим M2». Переход режима из «ручного режима M2» в «режим M3 операции рулевого колеса» запрашивается, если главное транспортное средство впоследствии достигает второй позиции P2. Переход режима выполняется от «режима M3 операции рулевого колеса» к «режиму M4 деактивации помощи рулевого колеса», если главное транспортное средство впоследствии достигает начальной точки Ps1 исчезновения полосы движения.
[0107] Если главное транспортное средство с выбранным «режимом M4 деактивации помощи рулевого колеса» въезжает на место оплаты дорожной пошлины, водитель проезжает через место оплаты дорожной пошлины, выполняя операции на рулевом колесе, и достигает конечной точки Ps2 исчезновения полосы движения. Если распознавание полосы движения возобновляется в позиции P3 сразу после достижения конечной точки Ps2 исчезновения полосы движения, запрашивается переход режима из «режима M4 деактивации помощи рулевого колеса» в «ручной режим M2». Кроме того, если условия ручного управления выполняются в позиции P4 во время передвижения с удержанием полосы движения в «ручном режиме M2», выполняется переход режима из «ручного режима M2» в «режим M1 свободных рук».
[0108] (Сценарий передвижения с присутствием искривления/без необходимости смены полосы движения: Фиг. 8).
Когда в смене полосы движения нет необходимости и имеется искривление C, первая позиция P1 устанавливается на первом расстоянии X1 от начальной точки Pc1 искривления, как показано на фиг. 8. Вторая позиция P2 устанавливается в позиции на втором расстоянии X2, которое меньше первого расстояния X1, от начальной точки Pc1 искривления.
[0109] Искривление C и место оплаты дорожной пошлины на главной дороге (участок S исчезновения полосы движения), в котором нельзя распознать ни одну полосу движения, продолжающуюся от текущей полосы движения, будут считаться обнаруженными на продолжении маршрута передвижения главного транспортного средства на основе картографических данных с высокой точностью во время передвижения с удержанием полосы движения к искривлению C и месту оплаты дорожной пошлины в «режиме M1 свободных рук». В этом случае информация о начальной точке Pc1 искривления и конечной точке Pc2 искривления будет захвачена, если искривление C обнаружено, и информация о начальной точке Ps1 исчезновения полосы движения и конечной точке Ps2 исчезновения полосы движения будет захвачена, если обнаружено место оплаты дорожной пошлины. Первая позиция P1 и вторая позиция P2, которые имеют начальную точку Pc1 искривления в качестве точки отсчета, устанавливаются между позицией главного транспортного средства и начальной точкой Ps1 исчезновения полосы движения.
[0110] Если главное транспортное средство при передвижении с удержанием полосы движения с выбранным «режимом M1 свободных рук» достигает первой позиции P1 из позиции P0 обнаружения, режим переходит из «режима M1 свободных рук» в «ручной режим M2». Переход режима из «ручного режима M2» в «режим M3 операции рулевого колеса» запрашивается, если главное транспортное средство достигает второй позиции P2.
[0111] Затем, если главное транспортное средство входит в начальную точку Pc1 искривления, искривление C до конечной точки Pc2 искривления проходит путем поворота передвижения с использованием «режима M3 операции рулевого колеса». Переход режима выполняется от «режима M3 операции рулевого колеса» к «режиму M4 деактивации помощи рулевого колеса», если достигается начальная точка Ps1 исчезновения полосы движения.
[0112] Если главное транспортное средство с «выбранным режимом M4 деактивации помощи рулевого колеса» въезжает на место оплаты дорожной пошлины, водитель проезжает через место оплаты дорожной пошлины, выполняя операции рулевого колеса, и достигает конечной точки Ps2 исчезновения полосы движения. Когда достигается конечная точка Ps2 исчезновения полосы движения, «режим M4 деактивации помощи рулевого колеса» также сохраняется после этого, поскольку автомагистраль будет закончится.
[0113] (Сценарий передвижения без искривления/с необходимостью смены полосы движения: Фиг. 9).
Когда необходима смена полосы движения и нет искривления C, первая позиция P1 устанавливается на позиции начальной точки Pe1 смены полосы движения, как показано на фиг. 9. Вторая позиция P2 установлена на втором расстоянии X2 от начальной точки Ps1 исчезновения полосы движения.
[0114] Ответвляющаяся дорога Y и место оплаты дорожной пошлины на ответвляющейся дороге (участок S исчезновения полосы движения), в котором не может быть распознана ни одна полоса движения, которая продолжается от текущей полосы движения, будут считаться обнаруженными на продолжении маршрута передвижения главного транспортного средства на основе картографических данных с высокой точностью во время передвижения с удержанием полосы движения к месту оплаты дорожной пошлины на ответвляющейся дороге в «режиме M1 свободных рук». В этом случае информация о начальной точке Pe1 смены полосы движения и конечной точке Pe2 смены полосы движения в соответствии с функцией помощи при движении по маршруту получается, если обнаруживается ответвляющаяся дорога Y. Информация о начальной точке Ps1 исчезновения полосы движения и конечной точке Ps2 исчезновения полосы движения захватывается, если обнаружено место оплаты дорожной пошлины. Первая позиция P1 (начальная точка Pe1 смены полосы движения) и первая позиция P2, которая имеет начальную точку Ps1 исчезновения полосы движения в качестве точки отсчета, устанавливаются между позицией главного транспортного средства и начальной точкой Ps1 смены полосы движения.
[0115] Если главное транспортное средство при передвижении с удержанием полосы движения с выбранным «режимом M1 свободных рук» достигает первой позиции P1 (= Pe1), происходит переход режима из «режима M1 свободных рук» в «ручной режим M2», и функция помощи при передвижении по маршруту начинает смену полосы движения. Главное транспортное средство выезжает на ответвляющуюся дорогу Y, меняет полосу движения и движется к конечной точке Pe2 смены полосы движения, заканчивая смену полосы движения.
[0116] Переход режима из «ручного режима M2» в «режим M3 операции рулевого колеса» запрашивается, если главное транспортное средство достигает второй позиции P2 после завершения смены полосы движения. Затем выполняется переход режима из «режима M3 операции рулевого колеса» в «режим M4 деактивации помощи рулевого колеса», если достигается начальная точка Ps1 исчезновения полосы движения.
[0117] Если главное транспортное средство с «выбранным режимом M4 деактивации помощи рулевого колеса» въезжает на место оплаты дорожной пошлины, водитель проезжает через место оплаты дорожной пошлины, выполняя операции рулевого колеса, и достигает конечной точки Ps2 исчезновения полосы движения. Когда достигается конечная точка Ps2 исчезновения полосы движения, «режим M4 деактивации помощи рулевого колеса» также сохраняется после этого, поскольку автомагистраль будет закончена.
[0118] (Сценарий передвижения с присутствием искривления/необходимости смены полосы движения: Фиг. 10).
Когда необходима смена полосы движения и имеется искривление C, первая позиция P1 устанавливается в позицию начальной точки Pe1 смены полосы движения, как показано на фиг. 10. Вторая позиция P2 устанавливается в позицию на втором расстоянии X2 от начальной точки Pc1 искривления.
[0119] Ответвляющаяся дорога Y, искривление C и место оплаты дорожной пошлины на ответвляющейся дороге (участок S исчезновения полосы движения), в котором не может быть распознана ни одна полоса движения, которая продолжается от текущей полосы движения, будут считаться обнаруженными вдоль продолжения маршрута передвижения главного транспортного средства на основе картографических данных с высокой точностью во время передвижения с удержанием полосы движения в направлении искривления C и месту сбора дорожной пошлины на ответвляющейся дороги в «режиме M1 свободных рук». В этом случае информация о начальной точке Pe1 смены полосы движения и конечной точке Pe2 смены полосы движения в соответствии с функцией помощи при передвижении по маршруту захватываются, если обнаруживается ответвляющаяся дорога Y. Информация о начальной точке Pc1 искривления и конечной точке Pc2 искривления захватывается, если искривление C обнаружено. Информация о начальной точке Ps1 исчезновения полосы движения и конечной точке Ps2 исчезновения полосы движения захватывается, если обнаружено место сбора дорожной пошлины. Первая позиция P1 (= начальная точка Pe1 смены полосы движения) и вторая позиция P2, которая имеет начальную точку Ps1 исчезновения полосы движения в качестве точки отсчета, устанавливаются между позицией главного транспортного средства и начальной точкой Ps1 смены полосы движения.
[0120] Если главное транспортное средство при движении с удержанием полосы движения с выбранным «режимом M1 свободных рук» достигает первой позиции P1 (Pe1), запрашивается переход режима из «режима M1 свободных рук» в «ручной режим M2»., и начинается смена полосы движения функцией помощи при передвижении по маршруту. Главное транспортное средство входит на ответвляющуюся дорогу Y, меняет полосу движения и передвигается к конечной точке Pe2 смены полосы движения, на которой смена полосы движения заканчивается. Переход режима из «ручного режима M2» в «рабочий режим M3 рулевого колеса» запрашивается, если главное транспортное средство достигает второй позиции P2.
[0121] Затем, если главное транспортное средство входит в начальную точку Pc1 искривления, искривление C до конечной точки Pc2 искривления проходят путем поворота передвижения с использованием «режима M3 операции рулевого колеса». Переход режима выполняется от «режима M3 операции рулевого колеса» к «режиму M4 деактивации помощи рулевого колеса», если достигается начальная точка Ps1 исчезновения полосы движения.
[0122] Если главное транспортное средство с «выбранным режимом M4 деактивации помощи рулевому колесу» въезжает на платную площадку, водитель проезжает через платную площадь, выполняя операции на рулевом колесе, и достигает конечной точки Ps2 исчезновения полосы движения. Когда достигается конечная точка Ps2 исчезновения полосы движения, «режим M4 деактивации помощи рулевого колеса» также сохраняется после этого, поскольку автомагистраль будет закончена.
[0123] Как объяснено выше, способ помощи при вождении и устройство помощи при вождении согласно первому варианту осуществления демонстрируют эффекты, перечисленные ниже.
[0124] (1) Этот способ помощи при вождении имеет функцию управления скоростью/продвижением транспортного средства и функцию удержания полосы движения в качестве функций помощи при вождении, чтобы помогать водителю при операциях вождения, и использует контроллер 47 перехода режима для выполнения переходов между режимами помощи при вождении. В качестве режимов помощи при вождении в этом способе предусмотрен «режим M1 свободных рук», который позволяет водителю убирать руки с рулевого колеса 23, «режимы M2, M3 захвата рулевого колеса», которые имеют в качестве условия, что водитель держит рулевое колесо 23 руками и «режим M4 деактивации помощи рулевого колеса», который деактивирует функцию удержания полосы движения. Во время передвижения с удержанием полосы движения, в котором был выбран «режим M1 свободных рук», участок S исчезновения полосы движения, в котором не может быть распознана никакая полоса движения, которая продолжается от текущей полосы движения, обнаруживается вдоль продолжения маршрута движения главного транспортного средства. Когда обнаруживается участок S исчезновения полосы движения, захватывается информация о начальной точке Ps1 исчезновения полосы движения, и позиция перехода режима (первая позиция P1 и вторая позиция P2) устанавливается между позицией главного транспортного средства и начальной точкой Ps1 исчезновения полосы движения. Когда главное транспортное средство достигает позиции перехода режима, запрашивается переход режима из «режима M1 свободных рук» в «режим M2, M3 захвата рулевого колеса». Когда подтверждается захват рулевого колеса 23 водителем, выполняется переход режима из «режима M2, M3 захвата рулевого колеса» в «режим M4 деактивации помощи рулевого колеса» до того, как главное транспортное средство достигнет начальной точки Ps1 исчезновения полосы движения (Фиг. 4). Следовательно, можно предоставить способ помощи при вождении, который может выполнять передачу от системы к водителю более надежно, ступенчато понижая уровень помощи при вождении, когда заранее известно, что помощь рулевого колеса будет деактивирована в сценарии передвижения с удержанием полосы движения в режиме помощи при вождении, в котором уровень помощи при вождении повышен.
[0125] (2) В случаях, когда не было возможности подтвердить захват рулевого колеса водителем до того, как начальная точка Ps1 исчезновения полосы движения была достигнута после того, как был запрошен переход режима в «режим M2, M3 захвата рулевого колеса», главное транспортное средство замедляется и останавливается, а затем функция управления скоростью/продвижением транспортного средства и функция удержания полосы движения, которые являются функциями помощи при вождении, деактивируются (этапы S23 и S24 на фиг. 5). Следовательно, в случаях, когда не было возможности подтвердить захват рулевого колеса водителем до того, как будет достигнута начальная точка Ps1 исчезновения полосы движения, функция защиты от сбоев может быть достигнута путем деактивации управления посредством замедления и остановки.
[0126] (3) Когда участок S исчезновения полосы движения обнаруживается на продолжении маршрута передвижения главного транспортного средства во время передвижения с удержанием полосы движения, в котором был выбран «режим M1 свободных рук», позиция перехода режима (первая позиция P1 и вторая позиция P2) затем устанавливаются обратным вычислением, так что главное транспортное средство может замедляться и останавливаться, когда будет достигнута начальная точка Ps1 исчезновения полосы движения (этапы S9, S10, S10 и S13 на фиг. 5). Следовательно, позиция перехода режима (первая позиция P1 и вторая позиция P2) могут быть установлены в подходящие позиции, которые позволяют ведущему транспортному средству замедляться и останавливаться, когда достигается начальная точка Ps1 исчезновения полосы движения.
[0127] (4) Способ помощи при вождении включает в себя, в качестве режимов захвата рулевого колеса, «ручной режим M2», который имеет в качестве условия, что водитель держит руки на рулевом колесе, и «режим M3 операции рулевого колеса», который побуждает водителя выполнять операции на рулевом колесе. Когда информация о начальной точке Ps1 исчезновения полосы движения захвачена, первая позиция P1 и вторая позиция P2 устанавливаются между позицией главного транспортного средства и начальной точкой Ps1 исчезновения полосы движения. Когда главное транспортное средство достигает первой позиции P1, запрашивается переход режима из «режима M1 свободных рук» в «ручной режим M2». Когда главное транспортное средство достигает второй позиции P2, запрашивается переход режима из «ручного режима M2» в «режим M3 операции рулевого колеса». Прежде чем главное транспортное средство достигнет начальной точки Ps1 исчезновения полосы движения, когда было сделано подтверждение того, что водитель захватывает рулевое колесо 23, выполняется переход режима из «режима M3 операции рулевого колеса» в «режим M4 деактивации помощи рулевого колеса» (этапы S16 → S17 → S18 → S19 → S21 на фиг. 5). Следовательно, в сценарии передвижения с удержанием полосы движения в «режиме M1 свободных рук» можно гарантировать, что передача от системы к водителю будет происходить без дискомфорта до того, как главное транспортное средство достигнет начальной точки Ps1 исчезновения полосы движения, когда будет подтверждено, что водитель захватывает руль 23.
[0128] (5) После того, как запрошен переход режима из «ручного режима M2» в «режим M3 операции рулевого колеса», когда работа рулевого колеса обнаружена до того, как главное транспортное средство достигнет начальной точки Ps1 исчезновения полосы движения, выполняется переход режима из «режима M3 операции рулевого колеса в« режим M4 деактивации помощи рулевого колеса»( этапы S19 → S20 → S21 на фиг. 5). Следовательно, в сценарии передвижения с удержанием полосы движения в «режиме M1 свободных рук» можно гарантировать, что передача от системы к водителю будет происходить без дискомфорта, если операция рулевого колеса была обнаружена до того, как главное транспортное средство достигнет начальной точки Ps1 исчезновения полосы движения.
[0129] (6) После того, как был запрошен переход режима из «режима M1 свободных рук» в «ручной режим M2», датчик 92 касания отслеживает, держит ли водитель свои руки на рулевом колесе 23. После того, как был запрошен переход режима из «ручного режима M2» в «режим M3 операции рулевого колеса», датчик 93 крутящего момента отслеживает, выполнил ли водитель операцию на рулевом колесе (этапы S16 и S20 на фиг. 5). Следовательно, когда способ имеет «ручной режим M2» и «режим M3 операции рулевого колеса» в качестве режимов захвата рулевого колеса, формы поведения водителя по отношению к рулевому колесу 23 разделяются на два режима, что позволяет осуществить более точное отслеживание.
[0130] (7) В случаях, когда путь передвижения с удержанием полосы движения с использованием «режима M1 свободных рук» представляет собой проезжую часть, которая не требует, чтобы главное транспортное средство меняло полосу движения, первая позиция P1 устанавливается на позицию первого расстояния X1 от начальной точки Ps1 исчезновения полосы движения, а вторая позиция P2 устанавливается на позицию на втором расстоянии X2, которое меньше первого расстояния X1, от начальной точки Ps1 исчезновения полосы движения (этапы S9 и S12 на фиг. 5). Следовательно, в случаях, когда путь передвижения с удержанием полосы движения с использованием «режима M1 свободных рук» представляет собой проезжую часть, которая не требует от главного транспортного средства смены полосы движения, первая позиция P1 и вторая позиция P2 могут быть установлены на начальную точку Ps1 исчезновения полосы движения в качестве точки отсчета.
[0131] (8) Способ помощи при вождении включает в себя функцию помощи при передвижении по маршруту, которая в случаях, когда водитель установил пункт назначения, помогает менять полосу движения с помощью руления, когда начальная точка Pe1 смены полосы движения, необходимая для передвижения по маршруту движения, достигнута, и подтверждается намерение произвести смену полосы движения операцией водителя. В случаях, когда путь передвижения с удержанием полосы движения с использованием «режима M1 свободных рук» представляет собой проезжую часть, которая требует, чтобы главное транспортное средство сменило полосу движения, первая позиция P1 устанавливается как начальная точка Pe1 смены полосы движения, а вторая позиция P2 установлена в позицию, отделенную заданным расстоянием (вторым расстоянием X2) от начальной точки Ps1 исчезновения полосы движения (этап S10 на фиг. 5). Следовательно, в случаях, когда путь передвижения с удержанием полосы движения с использованием «режима M1 свободных рук» представляет собой проезжую часть, которая требует, чтобы главное транспортное средство сменило полосу движения, первая позиция P1 может быть установлена на начальную точку Pe1 смены полосы движения, а вторая позиция P2 может быть установлена на начальную точку Ps1 исчезновения полосы движения в качестве точки отсчета. Кроме того, в случаях, когда путь передвижения с удержанием полосы движения представляет собой проезжую часть, требующую смены полосы движения, функция помощи при движении по маршруту может использоваться для выполнения смены полосы движения при условии, что маршрут передвижения создается на основе установки пункта назначения водителем (взаимодействие с навигационной системой 7).
[0132] (9) В случаях, когда имеется искривление C с радиусом поворота, равным или ниже заданного значения перед участком S исчезновения полосы движения, когда устанавливается первая позиция P1 или вторая позиция P2, точка отсчета для установки позиции изменяется с начальной точки Ps1 исчезновения полосы движения на начальную точку Pc1 искривления C (этап S13 на фиг. 5). Следовательно, в случаях, когда имеется искривление C с радиусом поворота, равным или ниже заданного значения перед участком S исчезновения полосы движения, можно избежать установки позиций перехода режима в позицию вдоль искривления C, и искривление C может быть пройдено при стабильном движении с удержанием полосы движения.
[0133] (10) В случаях, когда имеется искривление C с радиусом поворота, равным или ниже заданного значения перед участком S исчезновения полосы движения, целевое поперечное ускорение для координированного по искривлению замедления в «режиме M3 операции рулевого колеса» устанавливается ниже значения целевого поперечного ускорения для скоординированного по искривлению замедления в «ручном режиме M2», «режиме M1 свободных рук» и «режиме M4 деактивации помощи рулевого колеса». Следовательно, водителю может быть предоставлено чувство безопасности, если скорость транспортного средства, когда управление рулевым колесом передается водителю на искривлении C, ниже, чем в других режимах. Кроме того, можно предоставить водителю больше времени, чтобы отрегулировать ощущение операции после передачи обслуживания.
[0134] (11) Когда главное транспортное средство проходит через участок S исчезновения полосы движения для достижения конечной точки Ps2 исчезновения полосы движения с выбранным «режимом M4 деактивации помощи рулевого колеса» и возобновляется распознавание полосы движения, выполняется переход режима с «режима M4 деактивации помощи рулевого колеса» на «ручной режим M2» (этапы S32 → S33 → S34 на фиг. 5). Когда условия свободных рук выполняются во время передвижения с удержанием полосы движения в «ручном режиме M2», выполняется переход режима из «ручного режима M2» в «режим M1 свободных рук» (этапы S3 → S4 → S5 в Фиг. 5). Следовательно, даже в тех случаях, когда управление помощью рулевого колеса было деактивировано, можно обеспечить длинные сегменты передвижения с удержанием полосы движения с выбранным «режимом M1 свободных рук», открыв возможность восстановления «режима M1 свободных рук». То есть «ручной режим M2» может быть восстановлен из «режима M4 деактивации помощи рулевого колеса» при условии, что распознавание полосы движения возобновлено. Кроме того, «режим M1 свободных рук» может быть восстановлен, когда выполняются условия свободных рук, в то время как был выбран «ручной режим M2».
[0135] (12) Это устройство помощи при вождении имеет функцию управления скоростью/продвижением транспортного средства и функцию удержания полосы движения в качестве функций помощи при вождении, чтобы помочь водителю при операциях вождения, и снабжено контроллером 47 перехода режима для выполнения переходов между режимами помощи при вождении. В качестве режимов помощи при вождении в этом способе предусмотрен «режим M1 свободных рук», который позволяет водителю убирать руки с рулевого колеса, «режимы M2, M3 захвата рулевого колеса», которые имеют в качестве условия, что водитель держит рулевое колесо руками, и «режим M4 деактивации помощи рулевого колеса », который деактивирует функцию удержания полосы движения. Контроллер 47 перехода режима имеет: блок 471 обнаружения участка исчезновения полосы движения, который обнаруживает участок S исчезновения полосы движения, в котором никакая полоса движения, которая продолжается от текущей полосы движения, не может быть распознана на продолжении маршрута передвижения главного транспортного средства во время передвижения с сохранением полосы движения, в котором был выбран «режим M1 свободных рук»; блок 472 установки позиции, который захватывает информацию о начальной точке Ps1 исчезновения полосы движения и устанавливает позицию перехода режима (первая позиция P1 и вторая позиция P2) между позицией главного транспортного средства и начальной точкой Ps1 исчезновения полосы движения, когда участок S исчезновения полосы движения обнаружен; блоки запроса перехода режима (блок 473 запроса перехода в режим свободных рук и блок 474 запроса перехода в режим операции рулевого колеса), которые запрашивают переход режима из «режима M1 свободных рук» в «режим M2, M3 захвата рулевого колеса», если главное транспортное средство достигает позиции перехода режима; и блок 475 перехода в режим деактивации помощи рулевого колеса, который выполняет переход режима из «режима M2, M3 захвата рулевого колеса» в «режим M4 деактивации операции рулевого колеса» до того, как главное транспортное средство достигнет начальной точки Ps1 исчезновения полосы движения, если захват рулевого колеса 23 водителем подтвержден (фиг. 4). Следовательно, можно предоставить устройство помощи при вождении, которое может более надежно выполнять передачу от системы к водителю за счет ступенчатого понижения уровня помощи при вождении, когда заранее установлено, что помощь рулевого колеса будет деактивирована в сценарии передвижения с удержанием полосы движения в режиме с повышенным уровнем помощи при вождении.
[0136] Способ помощи при вождении и способ помощи при вождении согласно настоящему раскрытию были описаны выше на основе первого варианта осуществления. Однако конкретная конфигурация не ограничивается первым вариантом осуществления; в конструкцию могут быть внесены изменения, дополнения и т. д., если они не отклоняются от объема изобретения, указанного в формуле изобретения.
[0137] В первом варианте осуществления был представлен пример контроллера 47 перехода режима, который выполнял переходы между режимами «режим M1 свободных рук» → «ручной режим M2» → «режим M3 операции рулевого колеса» → «режима M4 деактивации помощи рулевого колеса». Однако контроллер перехода режима также может иметь по меньшей мере один режим, в котором можно подтвердить, что водитель держит рулевое колесо между «режимом свободных рук» и «режимом деактивации помощи рулевого колеса». Например, также может быть предоставлен пример, в котором выполняются переходы между режимами «режим свободных рук» → «режим захвата рулевого колеса» → «режим деактивации помощи рулевого колеса». Кроме того, также может быть предоставлен пример, в котором выполняются переходы между режимами «режим свободных рук» → «ручной режим» → «режим захвата рулевого колеса» → «режим операции рулевого колеса» → «режим деактивации помощи рулевого колеса».
[0138] В первом варианте осуществления был представлен пример, в котором способ помощи при вождении и устройство помощи при вождении по настоящему раскрытию использовались в транспортном средстве с помощью при вождении, имеющем бортовую усовершенствованную систему помощи водителю (ADAS), которая помогает водителю при операциях вождения. Однако, способ помощи при вождении и устройство помощи при вождении настоящего раскрытия могут быть применены к беспилотному транспортному средству, которое выполняет управление помощью при операциях для вождения, торможения и угла поворота в соответствии с целевым путем передвижения и которое передвигается посредством автономного вождения (AD) при выборе режима автономного вождения.


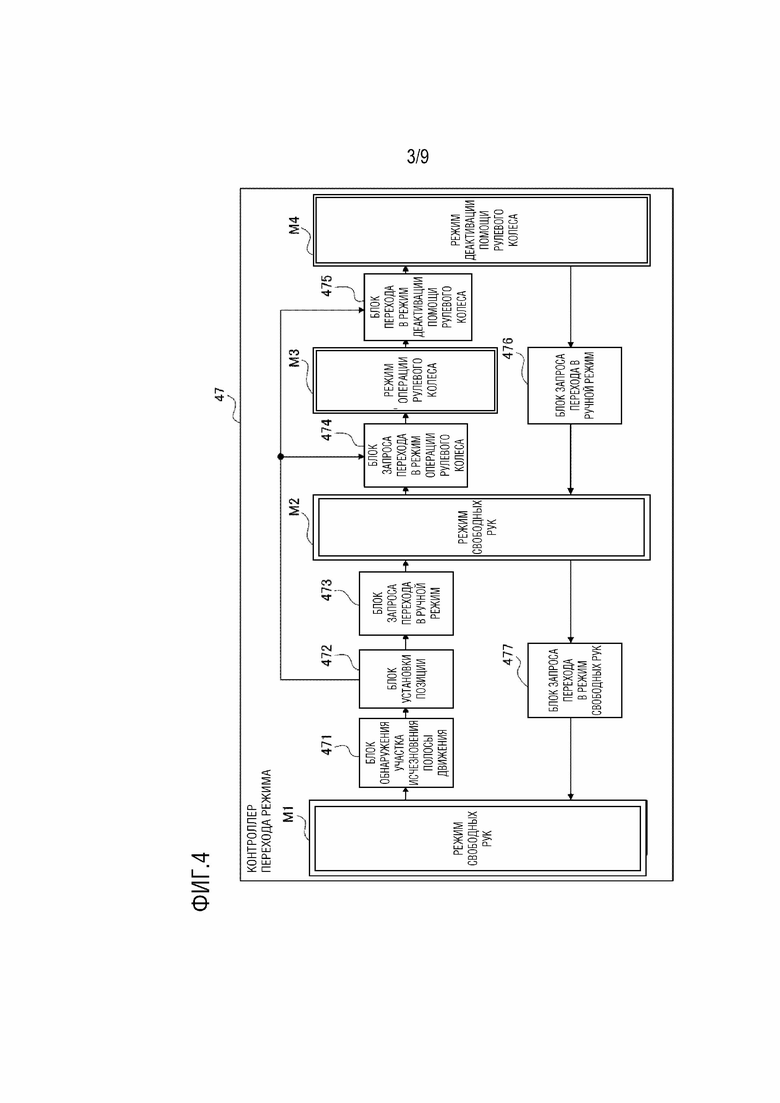






Изобретение относится к способу помощи при вождении и устройству помощи при вождении. Функция управления скоростью/продвижением транспортного средства и функция удержания полосы движения предусмотрены в качестве функций помощи при вождении, чтобы помогать при операциях вождения, осуществляемых водителем, и предусмотрен контроллер перехода режима для перехода между режимами помощи при вождении. Участок (S) исчезновения полосы движения, на котором не может быть распознана ни одна полоса движения, которая продолжается от текущей полосы движения, обнаруживается на продолжении маршрута передвижения главного транспортного средства во время передвижения с удержанием полосы движения, в котором был выбран «режим M1 свободных рук». Когда обнаруживается участок (S) исчезновения полосы движения, захватывается информация о начальной точке (Ps1) исчезновения полосы движения, и первая позиция (P1) и вторая позиция (P2) устанавливаются между позицией главного транспортного средства и начальной точкой (Ps1) исчезновения полосы движения. Первая позиция (P1), вторая позиция (P2) и начальная точка (Ps1) исчезновения полосы движения используются в качестве позиций перехода режима, и выполняются переходы «режим M1 свободных рук» → «ручной режим M2» → «режим М3 операции рулевого колеса» → «режим М4 деактивации помощи рулевого колеса». Достигается надежное выполнение передачи от системы к водителю за счет ступенчатого понижения уровня помощи при вождении, когда заранее установлено, что помощь рулевого колеса будет деактивирована в сценарии передвижения, включающем в себя режим с повышенным уровнем помощи при вождении. 3 н. и 14 з.п. ф-лы, 10 ил.
1. Способ помощи при вождении, который включает в себя функцию управления скоростью/продвижением транспортного средства и функцию удержания полосы движения в качестве функций помощи при вождении, чтобы помогать при операциях вождения, осуществляемых водителем, и который использует контроллер перехода режима для перехода между режимами помощи при вождении, отличающийся тем, что:
способ помощи при вождении включает в себя, в качестве режимов помощи при вождении, режим свободных рук, в котором водителю разрешено убирать руки с рулевого колеса, ручной режим, который включает в себя условие, что руки водителя находятся на рулевом колесе, режим операции рулевого колеса, который побуждает водителя выполнять операции рулевого колеса, и режим деактивации помощи рулевого колеса, в котором деактивируется функция удержания полосы движения;
захват информации об участке деактивации помощи рулевого колеса, на котором помощь рулевого колеса должна быть деактивирована во время передвижения с удержанием полосы движения, на котором выбран режим свободных рук;
запрос перехода режима из режима свободных рук в ручной режим на основе информации об участке деактивации помощи рулевого колеса;
определение находятся ли руки водителя на рулевом колесе, после того как запрошен переход режима в ручной режим;
запрос перехода режима из ручного режима в режим операции рулевого колеса при условии, что подтверждено, что руки водителя находятся на рулевом колесе;
определение, выполнил ли водитель операцию рулевого колеса после запроса перехода режима в режим операции рулевого колеса; и
выполнение перехода режима из режима операции рулевого колеса в режим деактивации помощи рулевого колеса при условии, что операция рулевого колеса водителем подтверждена до того, как главное транспортное средство достигнет участка деактивации помощи рулевого колеса.
2. Способ помощи при вождении по п.1, отличающийся тем, что:
в случаях, когда не было возможности подтвердить, что руки водителя находятся на рулевом колесе в течение заданного промежутка времени после запроса перехода режима в ручной режим, и в случаях, когда заданный промежуток времени истек, в котором не было возможности подтвердить операцию рулевого колеса водителем после того, как переход режима в режим операции рулевого колеса был запрошен, главное транспортное средство замедляется и останавливается, и затем функция управления скоростью/продвижением транспортного средства и функция удержания полосы движения, которые являются функциями помощи при вождении, деактивируются.
3. Способ помощи при вождении по п.1 или 2, отличающийся тем, что содержит:
отслеживание датчика касания, находятся ли руки водителя на рулевом колесе после запроса перехода режима из режима свободных рук в ручной режим; и
отслеживание отслеживаний датчика крутящего момента, выполнил ли водитель операцию рулевого колеса после запроса перехода режима из режима свободных рук в режим операции рулевого колеса.
4. Способ помощи при вождении, который включает в себя функцию управления скоростью/продвижением транспортного средства и функцию удержания полосы движения в качестве функций помощи при вождении для помощи при операциях вождения, осуществляемых водителем, и использует контроллер перехода режима для перехода между режимами помощи при вождении, отличающийся тем, что:
способ помощи при вождении включает в себя, в качестве режимов помощи при вождении, режим свободных рук, в котором водителю разрешено убрать руки с рулевого колеса, ручной режим, который включает в себя как условие, что водитель держит руки на рулевом колесе, и режим операции рулевого колеса, который побуждает водителя выполнять операции рулевого колеса, и режим деактивации помощи рулевого колеса, в котором деактивирована функция удержания полосы движения;
захват информации, что участок исчезновения полосы движения, на котором не может быть распознана полоса движения, которая продолжается от текущей полосы движения, существует вдоль продолжения маршрута передвижения главного транспортного средства во время передвижения с удержанием полосы движения, в котором был выбран режим свободных рук;
захват информации о начальной точке исчезновения полосы движения, когда участок исчезновения известен заранее, и установку первой позиции и второй позиции между главным транспортным средством и начальной точкой исчезновения полосы движения;
запрос перехода режима из режима свободных рук в ручной режим, когда главное транспортное средство достигает первой позиции;
запрос перехода режима из ручного режима в режим операции рулевого колеса, когда главное транспортное средство достигает второй позиции; и
выполнение перехода режима из режима операции рулевого колеса в режим деактивации помощи рулевого колеса до того, как главное транспортное средство достигнет начальной точки исчезновения полосы движения, когда было сделано подтверждение того, что водитель держит рулевое колесо.
5. Способ помощи при вождении по п.4, отличающийся тем, что:
после того, как запрошен переход режима из ручного режима в режим операции рулевого колеса, выполнение перехода режима выполняется из режима операции рулевого колеса в режим деактивации помощи рулевого колеса, когда операция рулевого колеса обнаруживается до того, как главное транспортное средство достигает начальной точки исчезновения полосы движения.
6. Способ помощи при вождении по п.4 или 5, отличающийся тем, что содержит:
определение, необходима или нет смена полосы движения и присутствует ли искривление, когда захвачена информация о начальной точке исчезновения полосы движения; и
упомянутые первая позиция и вторая позиция устанавливаются в соответствии с результатами определения, необходима или нет смена полосы движения и присутствует или отсутствует искривление.
7. Способ помощи при вождении по п.6, отличающийся тем, что:
в случаях, когда путь передвижения с удержанием полосы движения с использованием режима свободных рук представляет собой проезжую часть, которая не требует от главного транспортного средства смены полосы движения, первая позиция устанавливается на позицию на первом расстоянии от начальной точки исчезновения полосы движения, а вторая позиция устанавливается на позицию на втором расстоянии, меньшем, чем первое расстояние, от начальной точки исчезновения полосы движения.
8. Способ помощи при вождении по п.6 или 7, отличающийся тем, что:
способ помощи при вождении включает в себя функцию помощи при передвижении по маршруту, которая в случаях, когда водитель установил пункт назначения, помогает менять полосу движения с использованием рулевого управления, когда достигается начальная точка смены полосы движения, необходимая для передвижения по маршруту передвижения, и намерение выполнить смену полосы движения посредством операции водителя подтверждено; и
в случаях, когда путь передвижения с удержанием полосы движения с использованием режима свободных рук представляет собой проезжую часть, которая требует, чтобы главное транспортное средство сменило полосу движения, первая позиция устанавливается на начальную точку смены полосы движения, а вторая позиция устанавливается на позицию, отделенную на заданное расстояние от начальной точки исчезновения полосы движения.
9. Способ помощи при вождении по любому из пп.6-8, отличающийся тем, что:
в случаях, когда есть искривление с радиусом поворота, равным или ниже заданного значения, перед участком исчезновения полосы движения, когда устанавливается первая позиция или вторая позиция, точка отсчета для установки позиции изменяется с начальной точки исчезновения полосы движения на начальную точку искривления упомянутого искривления.
10. Способ помощи при вождении по п.9, отличающийся тем, что:
в случаях, когда есть искривление с радиусом поворота, равным или ниже заданного значения, перед участком исчезновения полосы движения, целевое поперечное ускорение для координированного по искривлению замедления в режиме операции рулевого колеса делается ниже, чем значения целевого поперечного ускорения для скоординированного по искривлению замедления в ручном режиме, режиме свободных рук и режиме деактивации помощи рулевого колеса.
11. Способ помощи при вождении по любому из пп.1-10, отличающийся тем, что:
когда главное транспортное средство проходит через участок исчезновения полосы движения, чтобы достичь конечной точки исчезновения полосы движения с выбранным режимом деактивации помощи рулевого колеса, и распознавание полосы движения возобновляется, выполняется переход режима из режима деактивации помощи рулевого колеса в ручной режим; и
когда соблюдаются условия свободных рук во время передвижения с удержанием полосы движения в ручном режиме, выполняется переход режима из ручного режима в режим свободных рук.
12. Способ помощи при вождении по любому из пп.1-11, отличающийся тем, что:
участок исчезновения полосы движения - это местоположение съезда, для которого картографические данные не включают в себя информацию о полосе движения.
13. Способ помощи при вождении по любому из пп.1-11, отличающийся тем, что:
участок исчезновения полосы движения - это место уплаты дорожной пошлины, для которого картографические данные включают в себя информацию об отсутствии полос движения.
14. Способ помощи при вождении по любому из пп.1-11, отличающийся тем, что:
участок исчезновения полосы движения - это сегмент без полосы движения, для которого картографические данные включают в себя информацию об отсутствии полос движения.
15. Способ помощи при вождении по любому из пп.1-11, отличающийся тем, что:
участок исчезновения полосы движения - это местоположение слияния, для которого картографические данные включают в себя информацию о том, что текущая полоса движения исчезнет из-за слияния.
16. Способ помощи при вождении по любому из пп.1-11, отличающийся тем, что:
участок исчезновения полосы движения - это местоположение уменьшения полосы движения, для которого картографические данные включают в себя информацию о том, что текущая полоса движения исчезнет из-за уменьшения полосы движения.
17. Устройство помощи при вождении, которое включает в себя функцию управления скоростью/продвижением транспортного средства и функцию удержания полосы движения в качестве функций помощи при вождении, чтобы помогать при операциях вождения, осуществляемых водителем, и которое снабжено контроллером перехода режима для перехода в режим помощи при вождении, отличающееся тем, что:
способ помощи при вождении включает в себя, в качестве режимов помощи при вождении, режим свободных рук, в котором водителю разрешено убирать руки с рулевого колеса, ручной режим, который включает в себя условие, что руки водителя находятся на рулевом колесе, режим операции рулевого колеса, который побуждает водителя выполнять операции рулевого колеса, и режим деактивации помощи рулевого колеса, в котором деактивируется функция удержания полосы движения; и
контроллер перехода режима включает в себя
блок обнаружения участка исчезновения полосы движения, который захватывает информацию, что участок исчезновения полосы движения, на котором не может быть распознана никакая полоса движения, которая продолжается от текущей полосы, существует вдоль продолжения маршрута передвижения главного транспортного средства во время передвижения с удержанием полосы движения, в котором режим свободных рук был выбран,
блок установки позиции, который захватывает информацию о начальной точке исчезновения полосы движения, когда участок исчезновения полосы движения известен заранее, и который устанавливает первую позицию и вторую позицию между позицией главного транспортного средства и начальной точкой исчезновения полосы движения,
блок запроса перехода в ручной режим, который запрашивает переход режима из режима свободных рук в ручной режим, когда главное транспортное средство достигает первой позиции, и
блок запроса перехода режима операции рулевого колеса, который запрашивает переход режима из ручного режима в режим операции рулевого колеса, когда главное транспортное средство достигает второй позиции, и
блок перехода режима деактивации помощи рулевого колеса, который выполняет переход режима из режима операции рулевого колеса в режим деактивации помощи рулевого колеса перед тем, как главное транспортное средство достигнет начальной точки исчезновения полосы движения, когда сделано подтверждение, что водитель держит рулевое колесо.
| JP 2017159723 A, 14.09.2017 | |||
| JP 2018203013 A, 27.12.2018 | |||
| JP 2012171562 A, 10.09.2012 | |||
| СИСТЕМА ИДЕНТИФИКАЦИИ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ИДЕНТИФИКАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2556774C1 |

