Область техники, к которой относится изобретение
Изобретение относится к системе указания маршрута и способу указания маршрута.
Уровень техники
В современной системе навигации текущее местоположение транспортного средства, которое является базисным транспортным средством, то есть текущее местоположение такового обнаруживается, например, устройством глобальной системы определения местоположения (GPS). Данные карты считываются из части хранения данных, и изображение карты на экране формируется в узле отображения. Местоположение базисного транспортного средства, которое указывает текущее местоположение такового, карта области, окружающей местоположение базисного транспортного средства, и тому подобное, отображаются в изображении карты на экране. Поэтому водитель, который является оператором, может управлять транспортным средством согласно местоположению базисного транспортного средства, которое отображается в изображении карты на экране.
Когда водитель вводит пункт назначения и задает условия поиска, обработка поиска маршрута выполняется на основании условий поиска, и маршрут до пункта назначения из местоположения отправки, которое представлено в качестве текущего местоположения, отыскивается согласно данным карты. Маршрут, который задан, то есть заданный маршрут, отображается в изображении карты на экране вместе с местоположением базисного транспортного средства. Выполняется ведение по заданному маршруту, то есть указание маршрута. Поэтому водитель может вести транспортное средство по заданному маршруту, который отображается.
В этой связи, при указании маршрута, когда есть особый перекресток, на котором транспортное средство должно повернуть направо или налево, выполняется указание маршрута, такое как посредством речевого вывода, например, прежде чем транспортное средство достигает перекрестка, который является определяющим траекторию движения перекрестком. Для того чтобы выполнялось указание маршрута, одна или более точек указания маршрута устанавливаются в местах на установленных расстояниях до определяющего траекторию движения перекрестка вдоль заданного маршрута. Когда транспортное средство прибывает в точки указания маршрута, указание маршрута с информационным наполнением, которое установлено заранее для каждой из точек указания маршрута, выводится речью (для примера обратитесь к патентному документу 1.)
[Патентный документ 1] Публикация № JP-A-6-295399 заявки на выдачу патента Японии.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Однако в традиционной системе навигации возможно, что указание маршрута до определяющего траекторию движения перекрестка представляется в каждой точке указания маршрута в показателях количества дорожных знаков, которые существуют между местоположением базисного транспортного средства и определяющим траекторию движения перекрестком, к примеру, посредством вывода речью сообщения, например, такого как «Поверните налево на третьем дорожном знаке». Но, так как подсчитываются все из дорожных знаков, которые существуют между местоположением базисного транспортного средства и определяющим траекторию движения перекрестком, если есть два дорожных знака на одном перекрестке, или есть дорожный знак, который дает предварительное уведомление о знаке, по дорожному знаку на перекрестке, предстоящего перекрестка, водителю трудно понять, какие дорожные знаки считать, значит, возможно, что водитель может претерпеть неудачу в опознавании определяющего траекторию движения перекрестка.
К тому же перекресток без дорожных знаков не принимается во внимание, значит, в случае, когда перекресток без дорожного знака существует между местоположением базисного транспортного средства и определяющим траекторию движения перекрестком, вероятно, что водитель может претерпеть неудачу в опознавании определяющего траекторию движения перекрестка.
Цель настоящего изобретения состоит в том, чтобы предложить систему указания маршрута и способ указания маршрута, которые разрешают проблему традиционной системы навигации предоставлением возможности водителю безошибочно опознавать определяющий направление движения перекресток.
Для такой цели система указания маршрута согласно настоящему изобретению включает в себя часть выявления текущего местоположения, которая выявляет текущее местоположение базисного транспортного средства в качестве местоположения базисного транспортного средства; средство обработки поиска маршрута, которое отыскивает заданный маршрут до пункта назначения на основании местоположения базисного транспортного средства; и средство обработки указания, которое устанавливает точку указания маршрута в заданном месте на заданном маршруте до определяющей траекторию движения точки и которое выполняет указание маршрута до определяющей траекторию движения точки, когда транспортное средство прибывает в точку указания маршрута.
«К тому же средство обработки указания включает в себя средство обработки вычисления элемента ветвления, которое вычисляет количество элементов ветвления от местоположения базисного транспортного средства до определяющей траекторию движения точки, средство обработки определяющей траекторию движения точки, которое выполняет указание маршрута на основании вычисленного количества элементов ветвления, средство обработки определения условий приостановки указания, которое определяет, применимы или нет условия приостановки указания, и средство обработки приостановки указания, которое, в случае, когда применимы условия приостановки указания, приостанавливает указание маршрута на основании количества элементов ветвления».
Согласно настоящему изобретению, вычисляется количество элементов ветвления от местоположения базисного транспортного средства до определяющей траекторию движения точки, и указание маршрута выполняется на основании вычисленного количества элементов ветвления, таким образом, является возможным несложно опознавать определяющую траекторию движения точку посредством подсчета количества элементов ветвления, независимо от количества дорожных знаков, которые существуют между местоположением базисного транспортного средства и определяющей траекторию движения точкой. Поэтому водитель не будет претерпевать неудачу в опознавании определяющей траекторию движения точки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - схема, показывающая систему навигации согласно первому варианту осуществления настоящего изобретения.
Фиг.2 - блок-схема последовательности операций способа, показывающая работу средства обработки указания согласно первому варианту осуществления настоящего изобретения.
Фиг.3 - первая схема, показывающая пример обработки указания согласно первому варианту осуществления настоящего изобретения.
Фиг.4 - вторая схема, показывающая пример обработки указания согласно первому варианту осуществления настоящего изобретения.
Фиг.5 - третья схема, показывающая пример обработки указания согласно первому варианту осуществления настоящего изобретения.
Фиг.6 - блок-схема последовательности операций способа, показывающая работу средства обработки указания согласно второму варианту осуществления настоящего изобретения.
Фиг.7 - первая схема, показывающая пример обработки указания согласно второму варианту осуществления настоящего изобретения.
Фиг.8 - вторая схема, показывающая пример обработки указания согласно второму варианту осуществления настоящего изобретения.
Фиг.9 - третья схема, показывающая пример обработки указания согласно второму варианту осуществления настоящего изобретения.
Фиг.10 - четвертая схема, показывающая пример обработки указания согласно второму варианту осуществления настоящего изобретения.
Фиг.11 - блок-схема последовательности операций способа, показывающая работу средства обработки указания согласно третьему варианту осуществления настоящего изобретения.
Фиг.12 - схема, показывающая пример обработки указания согласно третьему варианту осуществления настоящего изобретения.
Фиг.13 - схема, показывающая пример обработки указания согласно четвертому варианту осуществления настоящего изобретения.
Фиг.14 - схема, показывающая пример обработки указания согласно пятому варианту осуществления настоящего изобретения.
Фиг.15 - схема, показывающая пример обработки указания согласно шестому варианту осуществления настоящего изобретения.
ОПИСАНИЕ ССЫЛОЧНЫХ ПОЗИЦИЙ
10 Часть управления автоматической коробкой передач
14 Узел навигации
15 Датчик GPS
31, 54 ЦП
51 Информационный центр
63 Сеть
crj Перекресток
h1 Точка указания маршрута
pr Местоположение базисного транспортного средства
ri Дорога
Rt Заданный маршрут
sgk Дорожный знак
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения будут пояснены ниже со ссылкой на чертежи. Следует отметить, что система навигации разъяснена в качестве системы указания маршрута.
Фиг.1 - схема, показывающая систему навигации согласно первому варианту осуществления настоящего изобретения.
На фиг.1 позиция 10 обозначает часть управления автоматической коробкой передач, которая служит в качестве части управления трансмиссией. Часть 10 управления автоматической коробкой передач управляет трансмиссией, которая переключает передачи на предписанное передаточное число, такой как бесступенчатая коробка передач (CVT), которая служит в качестве автоматической коробки передач, ступенчатая коробка передач (автоматическая коробка передач), узел электропривода или тому подобное.
Позиция 14 обозначает узел навигации, который служит в качестве информационного терминала, такого как бортовой узел, который установлен на транспортном средстве. Позиция 63 обозначает сеть, а позиция 51 обозначает информационный центр, который служит в качестве поставщика информации. Система навигации собрана из части 10 управления автоматической коробкой передач, узла 14 навигации, сети 63, информационного центра и тому подобного.
Узел 14 навигации включает в себя датчик 15 глобальной системы определения местоположения (GPS), часть 16 хранения данных, средство 17 навигационной обработки, датчик 18 направления, операционная часть 34, часть 35 отображения, часть 36 речевого ввода, часть 37 речевого вывода и часть 38 связи. Датчик 15 GPS служит в качестве части выявления текущего местоположения, которая выявляет текущее местоположение базисного транспортного средства. Часть 16 хранения данных служит в качестве части хранения информации, где хранятся данные карты и различные другие типы данных. Средство 17 навигационной обработки выполняет различные типы вычислительной обработки, такой как навигационная обработка, и тому подобное, на основании информации, которая вводится. Датчик 18 направления служит в качестве части выявления направления, которая выявляет направление транспортного средства. Операционная часть 34 служит в качестве первой части ввода, чтобы водитель, который является оператором, производил предписанный ввод. Часть 35 отображения служит в качестве первой части вывода, которая использует изображения, отображенные на экране, не показанном на фиг.1, чтобы представлять различные типы информации и уведомлять водителя. Часть 36 речевого ввода служит в качестве второй части ввода для осуществления предписанного ввода посредством речи. Часть 37 речевого вывода служит в качестве второй части вывода, которая использует речь для представления различных типов информации и уведомления водителя. Часть 38 связи служит в качестве части передачи и приема, которая функционирует в качестве терминала связи. Датчик 15 GPS, часть 16 хранения данных, датчик 18 направления, операционная часть 34, часть 35 отображения, часть 36 речевого ввода, часть 37 речевого вывода и часть 38 связи присоединены к средству 17 навигационной обработки.
К тому же присоединенными к средству 17 навигационной обработки являются часть 10 управления автоматической коробкой передач, узел 18 переднего наблюдения, камера 49 заднего вида (камера заднего наблюдения), датчик 42 положения педали газа, датчик 43 положения педали тормоза, датчик 44 скорости транспортного средства и тому подобное. Узел 48 переднего наблюдения установлен в предписанном месте в передней части транспортного средства и контролирует область перед транспортным средством. Камера 49 заднего вида установлена в предписанном месте в задней части транспортного средства и служит в качестве узла фотосъемки, которая снимает изображения области позади транспортного средства и в качестве узла заднего наблюдения. Датчик 42 положения педали газа служит в качестве части выявления нагрузки двигателя, которая выявляет приведение в действие водителем педали газа на основании угла педали газа. Датчик 43 положения педали тормоза служит в качестве части выявления торможения, которая выявляет приведение в действие водителем педали тормоза на основании величины, на которую нажата педаль. Датчик 44 скорости транспортного средства служит в качестве части выявления скорости транспортного средства, которая выявляет скорость транспортного средства. Следует отметить, что датчик 42 положения педали газа, датчик 43 положения педали тормоза и тому подобное составляют часть выявления операционной информации, которая выявляет информацию о приведении в действие транспортного средства водителем.
Датчик 15 GPS выявляет текущее местоположение транспортного средства на Земле, а также время, принимая радиоволны, вырабатываемые спутником. В этом варианте осуществления датчик 15 GPS используется в качестве части выявления текущего местоположения, но датчик расстояния, датчик рулевого управления, высотомер или тому подобное, не показанные на фиг.1, также могут использоваться по отдельности или в сочетании вместо датчика 15 GPS. Гироскопический датчик, геомагнитный датчик или тому подобное могут использоваться в качестве датчика 18 направления. Следует отметить, что в этом варианте осуществления установлены датчик 18 направления, датчик 44 скорости транспортного средства и тому подобное, но, в тех случаях, когда используется датчик GPS, имеющий функции для выявления направления базисного транспортного средства, скорости транспортного средства и тому подобного, датчик 18 направления, датчик 44 скорости транспортного средства и тому подобное не нужны.
Часть 16 хранения данных снабжена базой данных карты, составленной из файлов данных карты, и данные карты хранятся в базе данных карты. Данные карты включают в себя данные перекрестков, имеющие отношение к перекресткам, данные разветвлений, имеющие отношение к разветвлениям, данные дорог, имеющие отношение к дорогам, поисковые данные, которые обрабатываются для поиска, данные сооружений, имеющие отношение к сооружениям, и тому подобное, а также данные местных признаков, имеющие отношение к местным признакам.
Местные признаки составлены отображениями, установленными или сформированными на дороге, чтобы предоставлять разные виды имеющих отношение к вождению информации и указаний водителям. Эти отображения включают в себя разделительные линии, указатели, пешеходные переходы, люки, дорожные знаки и тому подобное. Разделительные линии включают в себя стоп-линии для остановки транспортных средств, линии разграничения полос, которые очерчивают границы полос, разделительные линии, которые очерчивают места парковки, и тому подобное. Указатели включают в себя указатели установления различий полос в виде стрелок на каждой полосе, чтобы указывать направление движения, определяющие траекторию движения указатели, такие как слово «STOP», и тому подобное, которые предостерегают о приближающемся месте, где транспортное средство должно на мгновение остановиться. Определяющие траекторию движения указатели также могут включать в себя фразы, такие как «В (географическое название)» и тому подобное, которые дают направляющее указание. Данные местных признаков включают в себя информацию о местоположении, которая описывает местоположение каждого признака в показателях координат, и тому подобного, и изобразительную информацию, которая показывает изображение каждого признака. Следует отметить, что для мест, где транспортное средство должно на мгновение останавливаться, информация включает в себя места, где транспортные средства въезжают на главные дороги с боковых дорог, переезды, перекрестки с мигающими красными фонарями и так далее.
Данные дороги, имеющие отношение к полосам, включают в себя данные полос, в том числе номера полос, которые назначены каждой полосе на дороге, информацию о местоположении полос и тому подобное. Данные также хранятся в части 26 хранения данных, для того, чтобы часть 37 речевого вывода выводила предписанную информацию.
Статистическая база данных, составленная из файлов статистических данных, и база данных истории вождения, составленная из файлов данных истории вождения, также хранятся в части 16 хранения данных. Статистические данные в файлах статистических данных и данные истории вождения в файлах данных истории вождения хранятся в качестве данных фактических результатов.
Статистические данные являются информацией о фактическом движении в прошлом, то есть исторической информацией, которая описывает исторические события. Информация о движении, предоставленная в прошлом центрами информации о движении, и тому подобным (не показаны на фиг.1) в качестве поставщиков информации, таких как центр системы связи, и информации о транспортных средствах (VICS) и тому подобное, информация сбора данных о движении, которая является данными об интенсивностях движения из сборов информации о движении, предоставляемых министерством землепользования, инфраструктуры и транспорта, и информация дорожного расписания и тому подобное, также предоставляемые министерством землепользования, инфраструктуры и транспорта, используются по отдельности или в сочетании. Статистические данные создаются очисткой информации по необходимости, затем выполнением статистической обработки. Следует отметить, что может быть добавлена информация прогноза заторов и тому подобное для прогнозирования заторов и других назначений. В таком случае, когда создаются статистические данные, детализированные условия добавляются в историческую информацию, такие как информация о датах и времени, днях недели, погоде, различных типах событий, временах года, сооружениях (наличии или отсутствии универмагов, супермаркетов и тому подобного) и тому подобном.
К тому же элементы данных в статистических данных составлены из номеров соединений для различных соединений дорог, флажков направления для указания направления движения, классификаторов информации, которые показывают тип информации, уровней заторов в определенные моменты времени, требуемых соединениями времен, которые описывают времена, требуемые для проезда по различным соединениям дорог в определенные моменты времени, данных, требуемых соединением времен, усредненных по каждому дню недели (например, среднего времени для среды) и тому подобного.
Данные истории вождения составлены из информации, накопленной информационным центром 51 по множеству транспортных средств, то есть базисному транспортному средству и другим транспортным средствам, и представляют записи реального вождения транспортных средств, едущих по дорогам, где проехало каждое транспортное средство. То есть они являются реальной исторической информацией, которая описывает записи вождения, и, на основании данных вождения, вычисляются и накапливаются пробные данные.
Элементы данных в данных истории вождения составлены из требуемых соединением времен в определенные моменты времени, когда транспортные средства проезжали по каждому соединению дорог, уровней заторов в определенные моменты времени, когда транспортные средства проезжали по каждому соединению дорог, и тому подобного. Следует отметить, что данные истории вождения могут добавляться в статистические данные. В этом варианте осуществления уровень затора используется в качестве признака затора, который выражает масштаб затора. Затор, скопление и отсутствие затора выражаются поодиночке.
Для того чтобы хранить различные типы данных, часть 16 хранения данных включает в себя диск, не показанный на фиг.1, такой как жесткий диск, CD (компакт-диск), DVD (многофункциональный цифровой диск), оптический диск или тому подобное. Часть 16 хранения данных также включает в себя головку считывания/записи или тому подобное для считывания и записи различных типов данных. Также возможно использовать карту памяти, или тому подобное, для части 16 хранения данных. Следует отметить, что внешнее устройство хранения данных сформировано различными дисками, картой памяти или тому подобным.
В этом варианте осуществления база данных карты, статистическая база данных, база данных истории вождения и тому подобное встроены в часть 16 хранения данных, но база данных карты, статистическая база данных, база данных истории вождения и тому подобное также могут быть неотъемлемой частью информационного центра 51.
Средство 17 навигационной обработки включает в себя ЦП 31 (центральный процессор, CPU), ОЗУ 32 (RAM), ПЗУ 33 (ROM) и флэш-память, которая не показана на фиг.1. ЦП 31 служит в качестве устройства управления, которое управляет узлом 14 навигации, взятым в целом, и в качестве вычислительного устройства. ОЗУ 32 используется в качестве рабочей памяти, когда ЦП 31 выполняет различные типы вычислительной обработки. ПЗУ 33 содержит в себе управляющую программу, а также различные типы программ, которые отыскивают маршруты до пунктов назначения, выполняют указание маршрута и так далее. Флэш-память используется для хранения различных типов данных, программ и тому подобного. Следует отметить, что внутреннее устройство хранения данных сформировано ОЗУ 32, ПЗУ 33, флэш-памятью или тому подобным.
В этом варианте осуществления различные типы программ могут храниться в ПЗУ 33, и различные типы данных могут храниться в части 16 хранения данных, но программы, данные и тому подобное также могут храниться на диске или тому подобном. В таком случае программы, данные и тому подобное, которые считываются с диска или тому подобного, могут записываться во флэш-память. Программы, данные и тому подобное, поэтому, могут обновляться заменой диска или тому подобного. Управляющие программы, данные и тому подобное, части 10 управления автоматической коробкой передач также могут храниться на диске или тому подобном. Программы, данные и тому подобное могут приниматься через часть 38 связи и записываться во флэш-память в средстве 17 навигационной обработки.
Операционная часть 34 выполняет такие задачи, как корректировка текущего местоположения, когда транспортное средство начинает двигаться, ввод пункта отправления и пункта назначения, ввод точек, которые должны быть пройдены, и управление частью 38 связи - все согласно операциям водителя. Операционная часть 34 может использовать клавиатуру, мышь или тому подобное (не показанное на фиг.1), которые установлены независимо от части 35 отображения. Операционная часть 34 также может использовать сенсорный экран, который является допускающим выполнение предписанных операций ввода, которые производятся прикосновением или щелчком по операционной части изображения, такой как различные типы кнопок, переключателей, клавиш и тому подобного, которые отображаются в качестве изображений на экране, которые формируются частью 35 отображения.
Часть 35 отображения используется в качестве дисплея. К тому же различные экраны, которые сформированы на части 35 отображения, могут отображать текущее местоположение транспортного средства в качестве местоположения базисного транспортного средства; направление транспортного средства в качестве направления базисного транспортного средства; карты, заданный маршрут, определяющую траекторию движения информацию вдоль заданного маршрута, информацию о движении и тому подобное; расстояние до следующего перекрестка на заданном маршруте и направление перемещения на следующем перекрестке. Экраны также могут отображать справочник операций, меню операций и справочник кнопок для операционной части изображения, операционной части 34, части 36 речевого ввода и тому подобного. Экраны также могут отображать программы и тому подобное, которые передаются по радио посредством (частотно-модулированного) ЧМ-мультиплексирования.
Часть 36 речевого ввода включает в себя микрофон, который не показан на фиг.1, и может вводить требуемую информацию посредством речи. Часть 37 речевого вывода включает в себя узел синтеза речи и динамик, которые не показаны на фиг.1. Часть 37 речевого вывода, например, выводит заданный маршрут, определяющую траекторию движения информацию, информацию о движении и тому подобное посредством речи, которая синтезируется узлом синтеза речи.
Часть 38 связи включает в себя приемник маякового сигнала и ЧМ-приемник для приема различных типов информации, такой как информация о движении, которая передается из центра информации о движении, общая информация и тому подобное. Приемник маякового сигнала принимает информацию в качестве радиоволновых сигналов или оптических сигналов через радиоволновые маяки или оптические маяки, установленные вдоль дороги. ЧМ-приемник принимает информацию в качестве радиопередач с ЧМ-мультиплексированием через вещательные ЧМ-станции. Следует отметить, что информация о движении включает в себя информацию о заторах, инструктивную информацию, информацию о местах парковки, информацию о дорожно-транспортных происшествиях, информацию о состоянии заторов зоны обслуживания. Общая информация включает в себя новости, прогнозы погоды и тому подобное. Приемник маякового сигнала и ЧМ-приемник объединены в единый приемник VICS, но они также могут устанавливаться по отдельности.
Информация о движении содержит в себе классификацию информации, которая определяет тип информации, номер ячейки, который задает ячейку, номер соединения, которое задает соединение дорог, соединяющее две точки (например, два перекрестка), и также проводит различие между входящими и выходящими половинами дороги, и информацию о соединении или тому подобное, которое составляет информационное наполнение информации, которая предусмотрена для соответствующего номера соединения. Например, если информацией о движении является информация о заторах, информация о соединении составлена из данных переднего края затора, которые сообщают расстояние от начала соединения дорог до переднего края затора; уровня затора; длины затора, которая сообщает расстояние от переднего края затора до его заднего края; требуемого соединением времени, которое сообщает время, требуемое для проезда соединения дорог; и так далее.
Часть 38 связи также может принимать данные карты, статистические данные, данные истории вождения и тому подобное, а также различные типы информации, такой как информация о движении, общая информация и тому подобное, через сеть 63.
По такой причине информационный центр 51 включает в себя сервер 53, часть 57 связи, присоединенную к серверу 53, базу 58 данных, которая служит в качестве части хранения информации, и так далее. Сервер 53 включает в себя ЦП 54, ОЗУ 55 и ПЗУ 56. ЦП 54 служит в качестве устройства управления и в качестве вычислительного устройства. База 58 данных хранит такую же разновидность данных, которая хранится в части 16 хранения данных, например, такую как данные карты, статистические данные и данные истории вождения. Информационный центр 51 также может поставлять в реальном времени различные типы информации, такой как информация о движении, которая передается из центра информации о движении, общая информация и тому подобное, а также данные истории вождения, которые собираются с множества транспортных средств (базисного транспортного средства и других транспортных средств).
Узел 48 переднего наблюдения составлен из радара, такого как лазерный радар, радар миллиметрового диапазона или тому подобное, или ультразвукового датчика или тому подобного, либо сочетания радара или тому подобного и ультразвукового датчика или тому подобного. Узел 48 переднего наблюдения отслеживает транспортное средство, которое едет впереди базисного транспортного средства, то есть транспортного средства впереди, и, к тому же, отслеживает точки кратковременной остановки, препятствия и тому подобное. Узел 48 переднего наблюдения также выявляет относительную скорость, которая является скоростью транспортного средства относительно транспортного средства впереди, скорость сближения относительно точек кратковременной остановки, скорость сближения относительно препятствий, расстояние до транспортного средства впереди, время до транспортного средства впереди и тому подобное - все в качестве информации об области вокруг базисного транспортного средства.
Камера 49 заднего вида составлена из устройства ПЗС (прибора с зарядовой связью, CCD) и установлена таким образом, что ее оптическая ось наклонена вниз, для того, чтобы контролировать область позади транспортного средства. В дополнение к местным признакам, объекты для фиксации изображения включают в себя транспортное средство, едущее позади транспортного средства, то есть транспортное средство сзади, здания и другие конструкции на обочине и тому подобное. Камера 49 заднего вида формирует данные изображения сфотографированных объектов и отправляет данные в ЦП 31. ЦП 31 считывает данные изображения и выполняет обработку изображений над данными изображений, чтобы распознавать отдельные сфотографированные объекты в качестве распознанных объектов. В этом варианте осуществления устройство ПЗС используется в качестве камеры 49 заднего вида, но устройство КМОП (на комплементарных элементах металл-оксид-полупроводник, C-MOS) или тому подобное могут использоваться вместо устройства ПЗС.
Следует отметить, что система навигации, часть 10 управления, средство 17 навигационной обработки, ЦП 31, 54, сервер 53 и тому подобное функционируют в качестве компьютеров, независимо или в сочетании двух или более, и выполняют вычислительную обработку на основании различных типов программ, данных и тому подобного. К тому же запоминающие носители составлены из части 16 хранения данных, ОЗУ 32, 55, ПЗУ 33, 56, базы 58 данных, флэш-памяти и тому подобного. К тому же микропроцессоры или тому подобное могут использоваться в качестве вычислительных устройств вместо ЦП 31, 54.
Затем будет пояснена основная работа системы навигации, описанной выше.
Прежде всего, когда водитель приводит в действие операционную часть 34, и узел 14 навигации запускается, средство обработки инициализации навигации (не показано на фиг.1) из ЦП 31 выполняет обработку инициализации навигации, считывает текущее местоположение базисного транспортного средства, выявленное датчиком 15 GPS, считывает направление базисного транспортного средства, выявленное датчиком 18 направления, и инициализирует различные типы данных. Затем, средство обработки сопоставления (не показано на фиг.1) ЦП 31 выполняет обработку сопоставления и определяет текущее местоположение вынесением суждения, на каком соединении дорог находится текущее местоположение, на основании следа текущего местоположения, который считывался, формирует компоновку различных соединений дорог, которые увязывают дороги поблизости от текущего местоположения, и так далее.
К тому же, в этом варианте осуществления, средство обработки сопоставления дополнительно определяет текущее местоположение на основании местоположений различных местных признаков, которые являются сфотографированными объектами, фотографируемыми камерой 49 заднего вида.
Для такой цели средство обработки распознавания изображений ЦП 31, не показанное на фиг.1, выполняет обработку распознавания изображений, считывая данные изображения с камеры 49 заднего вида и распознавая местный признак в изображении, сформированном из данных изображения. К тому же средство обработки вычисления расстояния ЦП 31, не показанное на фиг.1, выполняет обработку вычисления расстояния, вычисляя расстояние от камеры 49 заднего вида до реального местного признака, на основании местоположения местного признака в изображении. Средство обработки определения текущего местоположения средства обработки сопоставления выполняет обработку определения текущего местоположения, изучая расстояние до местного признака и считывая данные местного признака из части 16 хранения данных для получения координат местного признака, затем определяя текущее местоположение на основании координат и расстояния до местного признака.
Средство обработки выявления полосы ЦП 31, не показанное на фиг.1, выполняет обработку выявления полосы, выявляя полосу движения, по которой базисное транспортное средство является едущим в текущий момент, то есть текущую полосу движения, посредством проверки местного признака, который распознавался на основании данных изображения, на соответствие данным местного признака, которые считаны из части 16 хранения данных.
Средство обработки выявления полосы может выявлять текущую полосу проезжей части считыванием выходного сигнала датчика из геомагнитного датчика, вынесением суждения о том, присутствует или нет выявляемый объект, состоящий из сильно магнитного объекта, такого как крышка люка или тому подобное, на данной полосе дороги, на основании выходного сигнала датчика, а затем выявлением полосы движения на основании такого суждения. Средство обработки выявления полосы также может выявлять текущую полосу движения посредством использования высокоточного датчика 15 GPS для выявления текущего местоположения с высокой точностью, затем выявления полосы на основании результата выявления текущего местоположения. По необходимости, средство обработки выявления также может выявлять текущую полосу движения объединением выходного сигнала геомагнитного датчика, текущего местоположения и тому подобного, в то же самое время, когда оно выполняет обработку изображения над данными изображения разделительных линий.
Средство обработки сбора основной информации ЦП 31, не показанное на фиг.1, выполняет обработку сбора основной информации, получая данные карты из части 16 хранения данных или принимая данные карты из информационного центра 51, или тому подобного, через часть 38 связи. Следует отметить, что, когда данные карты получены из информационного центра 51 или тому подобного, средство обработки сбора основной информации записывает принятые данные во флэш-память.
Средство обработки отображения ЦП 31, не показанное на фиг.1, выполняет обработку отображения, формируя различные типы экранов на части 35 отображения. Например, средство обработки отображения карты средства обработки отображения выполняет обработку отображения карты, формируя экран отображения карты на части 35 отображения, которая отображает текущее местоположение в качестве местоположения базисного транспортного средства и направление транспортного средства в качестве направления базисного транспортного средства, к тому же, наряду с отображением карты областей, окружающих изображение карты на экране.
Поэтому водитель способен вести транспортное средство согласно карте, положению базисного транспортного средства и направлению базисного транспортного средства.
Когда водитель задействует операционную часть 34 для ввода пункта назначения, средство обработки установки пункта назначения ЦП 31, не показанное на фиг.1, выполняет обработку установки пункта назначения и устанавливает пункт назначения. Следует отметить, что пункт отправления также может вводиться и устанавливаться по необходимости. Также возможно регистрировать данное местоположение заранее, затем устанавливать зарегистрированное местоположение в качестве пункта назначения. Когда водитель задействует операционную часть 34 для ввода условия поиска, средство обработки установки условия поиска ЦП 31, не показанное на фиг.1, выполняет обработку установки условия поиска и устанавливает условие поиска.
Когда пункт назначения и условие поиска установлены этим способом, средство обработки поиска маршрута ЦП 31, не показанное на фиг.1, выполняет обработку поиска маршрута. Средство обработки поиска маршрута считывает текущее местоположение, пункт назначения, условие поиска и тому подобное и считывает данные поиска и тому подобное из части 16 хранения данных. На основании текущего положения, пункта назначения, данных поиска и тому подобного, средство обработки поиска маршрута отыскивает маршрут от пункта отправки, представленного текущим местоположением, до пункта назначения согласно условию поиска. Средство обработки поиска маршрута выводит данные маршрута, которые описывают заданный маршрут. Заданный маршрут является маршрутом, для которого является наименьшей сумма стоимостей соединений, назначенных каждому соединению дорог.
К тому же, если множество полос сформировано на дороге, и если была выявлена текущая полоса движения, средство обработки поиска маршрута задает отдельные полосы на заданном маршруте. В таком случае номера полос у полос движения и тому подобное включены в данные маршрута.
Следует отметить, что обработка поиска маршрута может выполняться в информационном центре 51. В таком случае ЦП 31 передает текущее местоположение, пункт назначения, условие поиска и тому подобное в информационный центр 51 через сеть 63. Когда информационный центр 51 принимает текущее местоположение, пункт назначения, условие поиска и тому подобное, средство обработки поиска маршрута ЦП 54, не показанное на фиг.1, выполняет обработку поиска маршрута таким же образом, как ЦП 31. Средство обработки поиска маршрута считывает данные поиска из базы 58 данных на основании текущего местоположения, пункта назначения, данных поиска и тому подобного, отыскивает маршрут от пункта отправления до пункта назначения согласно условию поиска. Средство обработки поиска маршрута выводит данные маршрута, которые описывают заданный маршрут. Затем средство обработки передачи ЦП 54, не показанное на фиг.1, выполняет обработку передачи, передавая данные маршрута в узел 14 навигации через сеть 63.
Затем средство обработки указания ЦП 31, не показанное на фиг.1, выполняет обработку указания и выдает указание маршрута. Для этой цели средство обработки отображения маршрута средства обработки указания выполняет обработку отображения, считывая данные маршрута и отображая заданный маршрут в изображении карты на экране согласно данным маршрута.
В этой связи, когда транспортное средство должно поворачивать направо или налево на предписанном перекрестке, перекресток устанавливается в качестве определяющей траекторию движения точки и в качестве определяющего траекторию движения перекрестка для указания маршрута. Для такой цели средство обработки установки определяющего траекторию движения перекрестка средства обработки указания выполняет обработку установки определяющего траекторию движения перекрестка. Средство обработки установки определяющего траекторию движения перекрестка определяет, согласно данным маршрута, то есть на основании заданного маршрута, есть или нет перекресток, где транспортное средство должно поворачивать направо или налево. Если есть перекресток, где транспортное средство должно поворачивать направо или налево, перекресток устанавливается в качестве определяющего траекторию движения перекрестка.
Когда отдельные полосы были заданы на заданном маршруте, средство обработки установки рекомендованной полосы средства обработки указания выполняет обработку установки рекомендованной полосы, выбирая полосы, которые рекомендованы в качестве таковых, по которым должно перемещаться транспортное средство, и устанавливая их в качестве рекомендованных полос. Например, когда транспортное средство проходит через определяющий траекторию движения перекресток, средство обработки установки рекомендованной полосы выбирает и устанавливает подходящую полосу для въезда на определяющий траекторию движения перекресток, подходящую полосу для выезда с определяющего траекторию движения перекрестка, и так далее. К тому же средство обработки отображения маршрута, в дополнение к отображению заданного маршрута в изображении карты на экране, отображает увеличенную карту дороги, где перемещается транспортное средство, то есть увеличенную карту дороги, в заданной области изображения карты на экране и использует увеличенную карту дороги для выдачи указания полосы. В этом случае все из полос, а также специально рекомендованные полосы, отображаются на увеличенной карте экрана.
Затем средство обработки речевого вывода средства обработки указания выполняет обработку речевого вывода, выводя указание маршрута посредством речи из части 37 речевого вывода. Для этой цели средство обработки установки точки указания маршрута средства обработки речевого вывода выполняет обработку установки точки указания маршрута, устанавливая точку указания маршрута в одном или более местах на предустановленных расстояниях до определяющего траекторию движения перекрестка на заданном маршруте (то есть на стороне определяющего траекторию движения перекрестка, где расположено базисное транспортное средство). К тому же средство обработки указания точки средства обработки указания выполняет обработку указания точки. Когда транспортное средство прибывает в точку указания маршрута, выдается указание маршрута для определяющего траекторию движения перекрестка с информационным наполнением, которое установлено заранее для каждой из точек указания маршрута, такое как расстояние от местоположения базисного транспортного средства до определяющего траекторию движения перекрестка, поворачивает ли транспортное средство налево или направо на определяющем траекторию движения перекрестке, и тому подобное. К тому же, если была установлена рекомендованная полоса, средство обработки указания полосы средства обработки указания точки выполняет обработку указания полосы, выдавая указание полосы с информационным наполнением, которое установлено заранее для каждой из точек указания маршрута, таким как рекомендованная полоса от базисного транспортного средства до определяющего траекторию движения перекрестка, рекомендованная полоса после определяющего траекторию движения перекрестка и тому подобное.
К тому же средство обработки отображения увеличенной карты перекрестка средства обработки указания выполняет обработку отображения увеличенной карты перекрестка. Перед тем, как транспортное средство прибывает на определяющий траекторию движения перекресток, средство обработки отображения увеличенной карты перекрестка отображает увеличенную карту определяющего траекторию движения перекрестка, то есть увеличенную карту перекрестка, в заданной области изображения карты на экране и использует увеличенную карту перекрестка для предоставления указания маршрута. В этом случае карта области, окружающей определяющий траекторию движения перекресток, заданный маршрут и ориентиры, такие как сооружения и тому подобное на определяющем траекторию движения перекрестке отображаются на увеличенной карте перекрестка. К тому же в случае, когда множество полос сформировано на дороге, по которой транспортное средство въезжает на определяющий траекторию движения перекресток (в дальнейшем названной дорогой въезда), или на дороге, по которой транспортное средство выезжает с определяющего траекторию движения перекрестка (в дальнейшем названной дорогой выезда), и выполняется указание полосы, средство обработки формирования увеличенной карты точки указания отображает рекомендованные полосы на увеличенной карте перекрестка.
В этой связи, возможно, что указание маршрута до определяющего траекторию движения перекрестка представляется в каждой точке указания маршрута в показателях количества дорожных знаков, которые существуют между местоположением базисного транспортного средства и определяющим траекторию движения перекрестком, к примеру, посредством вывода сообщения (речевой фразы), например, подобного «Поверните налево на третьем дорожном знаке». Но, так как подсчитываются все из дорожных знаков, которые существуют между местоположением базисного транспортного средства и определяющим траекторию движения перекрестком, если есть два дорожных знака на одном перекрестке, или есть дорожный знак, который дает предварительный сигнал о знаке, по дорожному знаку на перекрестке, водителю трудно понять, какие дорожные знаки считать, значит, возможно, что водитель может претерпеть неудачу в опознавании определяющего траекторию движения перекрестка.
К тому же перекресток без дорожных знаков не принимается во внимание, значит, в случае, когда перекресток без дорожного знака существует между местоположением базисного транспортного средства и определяющим траекторию движения перекрестком, вероятно, что водитель может претерпеть неудачу в опознавании определяющего траекторию движения перекрестка.
Поэтому, в этом варианте осуществления, указание маршрута до определяющего траекторию движения перекрестка представляется в каждой точке указания маршрута в показателях количества перекрестков или количества дорог, которые существуют между местоположением базисного транспортного средства и определяющим траекторию движения перекрестком, независимо от присутствия или отсутствия знаков.
Фиг.2 - блок-схема последовательности операций способа, показывающая работу средства обработки указания согласно первому варианту осуществления настоящего изобретения. Фиг.3 - первая схема, показывающая пример обработки указания согласно первому варианту осуществления настоящего изобретения. Фиг.4 - вторая схема, показывающая пример обработки указания согласно первому варианту осуществления настоящего изобретения. Фиг.5 - третья схема, показывающая пример обработки указания согласно первому варианту осуществления настоящего изобретения.
На схемах символ pr ссылки обозначает местоположение базисного транспортного средства, символы ri ссылки (где i=1, 2, …) обозначают дороги, символы crj ссылки (где j=1, 2, …) обозначают перекрестки, где пересекаются две или более отдельных дорог, и символы sgk ссылки (где k=1, 2, …) обозначают дорожные знаки. К тому же символ Rt ссылки обозначает заданный маршрут, символ c1 ссылки обозначает определяющий траекторию движения перекресток, который, в числе перекрестков crj, установлен в качестве перекрестка на заданном маршруте Rt1, где транспортное средство поворачивает направо или налево, и символ h1 ссылки обозначает точку указания маршрута, которая установлена на заданном маршруте Rt до определяющего траекторию движения перекрестка c1.
На фиг.3 дороги r1 и r2 пересекаются на перекрестке cr1. Заданный маршрут Rt сконфигурирован, чтобы проходить по дороге r1 и поворачивать налево на перекрестке cr1. Перекресток cr1 становится определяющим траекторию движения перекрестком c1.
На фиг.4 дороги r1 и r2 пересекаются на перекрестке cr1, дороги r1 и r3 пересекаются на перекрестке cr2, а дороги r1 и r4 пересекаются на перекрестке cr3. Заданный маршрут Rt сконфигурирован, чтобы проходить по дороге r1 и поворачивать налево на перекрестке cr3. Перекресток cr3 становится определяющим траекторию движения перекрестком c1.
На фиг.5 дороги r1 и r2 пересекаются на перекрестке cr1, дороги r1 и r3 пересекаются на перекрестке cr2, а дороги r1 и r4 пересекаются на перекрестке cr3. Заданный маршрут Rt сконфигурирован, чтобы проходить по дороге r1 и поворачивать налево на перекрестке cr3. Перекресток cr3 становится определяющим траекторию движения перекрестком c1. К тому же дорожные знаки с sg1 по sg3 установлены на перекрестках с cr1 по cr3.
В этих случаях средство обработки определения достижения точки средства обработки указания выполняет обработку определения достижения точки, определяя, прибыло или нет транспортное средство, приближающееся к определяющему траекторию движения перекрестку c1, в точку h1 указания заданного маршрута. Если транспортное средство прибыло в точку h1 указания заданного маршрута, средство обработки вычисления элемента ветвления средства обработки указания выполняет обработку вычисления элемента ветвления, вычисляя количество подсчитываемых элементов ветвления, которые являются элементами ветвления, которые подвергаются подсчету и которые, в этом варианте осуществления, являются перекрестками crj. Следует отметить, что, в этом варианте осуществления, определяющий траекторию движения перекресток c1 включен в перекрестки crj, которые подвергаются подсчету.
Затем средство обработки указания точки средства обработки указания выполняет обработку указания точки, выводя посредством речи указание маршрута, которое основано на количестве перекрестков crj.
Следует отметить, что средство обработки определения дорожного знака средства обработки указания выполняет обработку определения дорожного знака, определяя, существует или нет дорожный знак на определяющем траекторию движения перекрестке. Если дорожный знак существует на определяющем траекторию движения перекрестке, средство обработки указания точки факторизует существование дорожного знака в указание маршрута, которое основано на количестве перекрестков, и выводит указание маршрута посредством речи.
Например, в примере, показанном на фиг.3, когда транспортное средство прибывает в точку h1 указания маршрута, вычисляется количество перекрестков cr1 между местоположением pr базисного транспортного средства и определяющим траекторию движения перекрестком c1. В этом случае количеством перекрестков cr1 является 1, значит, средство обработки указания точки выводит указание маршрута, посредством речи, в виде сообщения, такого как «Поверните налево на следующем перекрестке», или тому подобное.
К тому же в примере, показанном на фиг.4, когда транспортное средство прибывает в точку h1 указания маршрута, вычисляются перекрестки с cr1 по cr3 между местоположением pr базисного транспортного средства и определяющим траекторию движения перекрестком c1. В этом случае количеством перекрестков с cr1 по cr3 является 3, значит, средство обработки указания точки выводит указание маршрута, посредством речи, в виде сообщения, такого как «Поверните налево на третьем перекрестке», или тому подобное.
К тому же в примере, показанном на фиг.5, когда транспортное средство прибывает в точку h1 указания маршрута, вычисляются перекрестки с cr1 по cr3 между местоположением pr базисного транспортного средства и определяющим траекторию движения перекрестком c1. В этом случае количеством перекрестков с cr1 по cr3, где существуют дорожные знаки, является 3, и дорожный знак sg3 существует на определяющем траекторию движения перекрестке c1, значит, средство обработки указания точки выводит указание маршрута, посредством речи, в виде сообщения, такого как «Поверните налево на третьем перекрестке, который имеет дорожный знак», или тому подобное.
Таким образом, в этом варианте осуществления, указание маршрута выполняется на основании количества перекрестков crj между местоположением базисного транспортного средства и определяющим направление движения перекрестком c1, значит, водитель может распознавать определяющий траекторию движения перекресток c1 просто подсчетом количества перекрестков crj, независимо от количества дорожных знаков sgk, которые существуют между местоположением pr базисного транспортного средства и определяющим траекторию движения перекрестком c1. Например, даже если есть два дорожных знака на одном перекрестке, или есть дорожный знак, который дает предварительное уведомление о знаке, по дорожному знаку, на перекрестке, водитель не будет претерпевать неудачу в опознавании определяющего траекторию движения перекрестка c1.
К тому же, так как все перекрестки crj между местоположением базисного транспортного средства и определяющим траекторию движения перекрестком подсчитываются независимо от присутствия или отсутствия дорожных знаков, водитель не будет претерпевать неудачу в опознавании определяющего траекторию движения перекрестка c1.
Более того, даже если перекресток существует за определяющим траекторию движения перекрестком c1, водитель не будет претерпевать неудачу в опознавании определяющего траекторию движения перекрестка c1.
Затем будет пояснена блок-схема последовательности операций способа.
На этапе S1 система ожидает, чтобы транспортное средство подъехало к определяющему траекторию движения перекрестку c1. Если транспортное средство подъезжает к определяющему траекторию движения перекрестку c1, управление переходит на этап S2. На этапе S2 система вычисляет количество перекрестков crj от местоположения базисного транспортного средства до определяющего траекторию движения перекрестка c1. На этапе S3 указание маршрута выводится речью на основании количества перекрестков crj, и управление возвращается.
В этой связи, в этом варианте осуществления изобретения, средство обработки вычисления элемента ветвления вычисляет количество перекрестков crj в качестве подсчитываемых элементов ветвления от местоположения pr базисного транспортного средства до определяющего траекторию движения перекрестка c1, но средство обработки вычисления элемента ветвления может рассчитывать количество дорог, которые пересекают дорогу r1, в качестве подсчитываемых элементов ветвления от местоположения pr базисного транспортного средства до определяющего траекторию движения перекрестка c1. Следует отметить, что, в этом случае, дорога, которая пересекает дорогу r1 на определяющем траекторию движения перекрестке c1, также включена в дороги, которые подвергаются вычислению.
Затем средство обработки указания точки выводит указание маршрута, посредством речи, на основании количества дорог.
Далее, обработка указания будет описана для случая, когда, по меньшей мере, один из перекрестков crj от местоположения pr базисного транспортного средства до определяющего траекторию движения перекрестка c1 является T-образным перекрестком (трехсторонним перекрестком).
Фиг.6 - блок-схема последовательности операций способа, показывающая работу средства обработки указания согласно второму варианту осуществления настоящего изобретения. Фиг.7 - первая схема, показывающая пример обработки указания согласно второму варианту осуществления настоящего изобретения. Фиг.8 - вторая схема, показывающая пример обработки указания согласно второму варианту осуществления настоящего изобретения. Фиг.9 - третья схема, показывающая пример обработки указания согласно второму варианту осуществления настоящего изобретения. Фиг.10 - четвертая схема, показывающая пример обработки указания согласно второму варианту осуществления настоящего изобретения.
На схемах символ pr ссылки обозначает местоположение базисного транспортного средства, символы ri ссылки (где i=1, 2, …) обозначают дороги, символы crj ссылки (где j=1, 2, …) обозначают перекрестки, где пересекаются две или более определенных дорог, и символы sgk ссылки (где k=1, 2, …) обозначают дорожные знаки. К тому же символ Rt ссылки обозначает заданный маршрут, символ c1 ссылки обозначает определяющий траекторию движения перекресток, который, в числе перекрестков crj, установлен в качестве перекрестка на заданном маршруте Rt1, где транспортное средство поворачивает направо или налево, и символы h1, h2 ссылки обозначают точки указания маршрута, которые установлены на заданном маршруте Rt до определяющего траекторию движения перекрестка c1.
На фиг.7 дороги r1 и r2 пересекаются на перекрестке cr1, а дороги r1 и r3 пересекаются на перекрестке cr2. Заданный маршрут Rt сконфигурирован, чтобы проходить по дороге r1 и поворачивать налево на перекрестке cr2. Перекресток cr2 становится определяющим траекторию движения перекрестком c1. Следует отметить, что перекрестки cr1, cr2 являются T-образными перекрестками, и что дороги r2, r3 тянутся в таком же направлении, как дорога выезда с определяющего траекторию движения перекрестка c1.
На фиг.8 дороги r1 и r2 пересекаются на перекрестке cr1, дороги r1 и r3 пересекаются на перекрестке cr2, а дороги r1 и r4 пересекаются на перекрестке cr3. Заданный маршрут Rt сконфигурирован, чтобы проходить по дороге r1 и поворачивать налево на перекрестке cr3. Перекресток cr3 становится определяющим траекторию движения перекрестком c1. Следует отметить, что перекрестки cr1, cr3 являются полными перекрестками (четырехсторонними перекрестками), что перекресток cr2 является T-образным перекрестком, и что дороги с r2 по r4 тянутся в таком же направлении, как дорога выезда с определяющего траекторию движения перекрестка c1. К тому же дорожные знаки sg1, sg2 установлены на перекрестках cr1, cr3.
На фиг.9 дороги r1 и r2 пересекаются на перекрестке cr1, дороги r1 и r3 пересекаются на перекрестке cr2, а дороги r1 и r4 пересекаются на перекрестке cr3. Заданный маршрут Rt сконфигурирован, чтобы проходить по дороге r1 и поворачивать налево на перекрестке cr3. Перекресток cr3 становится определяющим траекторию движения перекрестком c1. Следует отметить, что перекрестки cr1, cr3 являются полными перекрестками, что перекресток cr2 является T-образным перекрестком, что дороги r2, r4 тянутся в таком же направлении, как дорога выезда с определяющего траекторию движения перекрестка c1, и что дорога r3 тянется в противоположном направлении от дороги выезда с определяющего траекторию движения перекрестка c1. К тому же дорожные знаки sg1, sg2 установлены на перекрестках cr1, cr3.
На фиг.10 дороги r1 и r2 пересекаются на перекрестке cr1, дороги r1 и r3 пересекаются на перекрестке cr2, а дороги r1 и r4 пересекаются на перекрестке cr3. Заданный маршрут Rt сконфигурирован, чтобы проходить по дороге r1 и поворачивать налево на перекрестке cr3. Перекресток cr3 становится определяющим траекторию движения перекрестком c1. Следует отметить, что перекресток cr3 является полным перекрестком, что перекрестки cr1, cr2 являются T-образными перекрестками, что дороги r3, r4 тянутся в таком же направлении, как дорога выезда с определяющего траекторию движения перекрестка c1, и что дорога r2 тянется в противоположном направлении от дороги выезда с определяющего траекторию движения перекрестка c1. К тому же дорожный знак sg1 установлен на перекрестке cr3.
В этих случаях средство обработки определения достижения точки определяет, является ли транспортное средство подходящим к определяющему траекторию движения перекрестку c1 и прибыло ли в точку h1 указания заданного маршрута. Если транспортное средство прибыло в точку h1 указания заданного маршрута, средство обработки определения перекрестка средства обработки указания выполняет обработку определения пересечения, определяя, существует или нет T-образный перекресток от местоположения pr базисного транспортного средства до определяющего траекторию движения перекрестка c1.
Если T-образный перекресток не существует, средство обработки вычисления элемента ветвления вычисляет количество перекрестков crj в качестве подсчитываемых элементов ветвления от местоположения pr базисного транспортного средства до определяющего траекторию движения перекрестка c1 таким же образом, как в первом варианте осуществления. Затем средство обработки указания точки выводит указание маршрута, посредством речи, на основании количества перекрестков crj. Следует отметить, что, в случае, когда определяется присутствие или отсутствие дорожных знаков на определяющем траекторию движения перекрестке, и дорожный знак существует на определяющем траекторию движения перекрестке, существование дорожного знака может факторизоваться в указание маршрута, который основан на количестве перекрестков.
С другой стороны, если T-образный перекресток существует, средство обработки вычисления элемента ветвления вычисляет, в качестве подсчитываемых элементов ветвления от местоположения pr базисного транспортного средства до определяющего траекторию движения перекрестка c1, количество дорог, которые тянутся в таком же направлении, как дорога выезда с определяющего траекторию движения перекрестка c1. Следует отметить, что, в этом варианте осуществления, дорога, которая пересекает дорогу r1 на определяющем траекторию движения перекрестке c1, также включена в дороги, которые подвергаются подсчету.
Затем, средство обработки указания точки выводит указание маршрута, посредством речи, на основании количества дорог.
Следует отметить, что, в случае, когда дорога, которая тянется в противоположном направлении от дороги выезда с определяющего траекторию движения перекрестка c1, существует между точкой h1 указания маршрута и ближайшей дорогой к местоположению pr базисного транспортного средства из числа дорог, которые тянутся в таком же направлении, как дорога выезда с определяющего траекторию движения перекрестка c1, существует возможность, что водитель может ошибочно подумать, что перекресток является определяющим траекторию движения перекрестком. Поэтому средство обработки определения особого элемента ветвления средства обработки указания выполняет обработку определения особого элемента ветвления, определяя, существует или нет особый элемент ветвления, который, возможно, может быть подсчитан по ошибке. Если особый элемент ветвления существует, средство обработки задержки средства обработки указания выполняет обработку задержки, задерживая указание маршрута, затем выдавая указание маршрута речью после того, как транспортное средство проехало особый элемент ветвления.
Например, в примере, показанном на фиг.7, когда транспортное средство прибывает в точку h1 указания маршрута, вычисляется количество дорог r2, r3 между местоположением pr базисного транспортного средства и определяющим траекторию движения перекрестком c1, которые тянутся в таком же направлении, как дорога выезда с определяющего траекторию движения перекрестка c1. В этом случае количеством дорог r2, r3 является 2, значит, средство обработки указания точки выводит указание маршрута, посредством речи, в виде сообщения, такого как «Поверните налево на второй дороге», или тому подобное.
В примере, показанном на фиг.8, когда транспортное средство прибывает в точку h1 указания маршрута, вычисляется количество дорог r2, r3 между местоположением pr базисного транспортного средства и определяющим траекторию движения перекрестком c1, которые тянутся в таком же направлении, как дорога выезда с определяющего траекторию движения перекрестка c1. В этом случае количеством дорог с r2 по r4 является 3, значит, средство обработки указания точки выводит указание маршрута, посредством речи, в виде сообщения, такого как «Поверните налево на третьей дороге», или тому подобное.
В примере, показанном на фиг.9, когда транспортное средство прибывает в точку h1 указания маршрута, вычисляется количество дорог r2, r4 между местоположением pr базисного транспортного средства и определяющим траекторию движения перекрестком c1, которые тянутся в таком же направлении, как дорога выезда с определяющего траекторию движения перекрестка c1. В этом случае количеством дорог r2, r4 является 2, значит, средство обработки указания точки выводит указание маршрута, посредством речи, в виде сообщения, такого как «Поверните налево на второй дороге», или тому подобное.
В примере, показанном на фиг.10, когда транспортное средство прибывает в точку h1 указания маршрута, вычисляется количество дорог r3, r4 между местоположением pr базисного транспортного средства и определяющим траекторию движения перекрестком c1, которые тянутся в таком же направлении, как дорога выезда с определяющего траекторию движения перекрестка c1. В этом случае количеством дорог r3, r4 является 2, значит, для средства обработки указания точки является возможным выводить указание маршрута, посредством речи, в точке h1 указания маршрута в виде сообщения, такого как «Поверните налево на второй дороге», или тому подобное. Однако дорога r2, которая тянется в противоположном направлении от дороги выезда с определяющего траекторию движения перекрестка c1, существует между точкой h1 указания маршрута и дорогой r3, которая, из дорог r3, r4, которые тянутся в таком же направлении, как дорога выезда с определяющего траекторию движения перекрестка c1, является ближайшей дорогой к местоположению pr базисного транспортного средства. Поэтому существует возможность, что водитель будет ошибочно думать, что перекресток cr2 является определяющим траекторию движения перекрестком. Соответственно, система выводит указание маршрута речью в виде сообщения, такого как «Поверните налево на второй дороге» или тому подобное, в точке h2 указания маршрута, только после того, как транспортное средство проехало точку h1 указания маршрута и проехало перекресток cr1.
Таким образом, в этом варианте осуществления изобретения, система определяет, существует или нет T-образный перекресток от местоположения pr базисного транспортного средства до определяющего траекторию движения перекрестка c1. Если T-образный перекресток не существует, указание маршрута выполняется на основании количества перекрестков crj. Если T-образный перекресток существует, указание маршрута выполняется на основании количества дорог. Поэтому водитель способен опознавать определяющий траекторию движения перекресток c1 просто подсчетом количества перекрестков crj или количества дорог, независимо от количества дорожных знаков sgk, которые существуют между местоположением pr базисного транспортного средства и определяющим траекторию движения перекрестком c1.
Затем будет пояснена блок-схема последовательности операций способа на фиг.6.
На этапе S11 система ожидает, чтобы транспортное средство приблизилось к определяющему траекторию движения перекрестку c1. Если транспортное средство подъезжает к определяющему траекторию движения перекрестку c1, управление переходит на этап S12. На этапе S12 система определяет, существует или нет T-образный перекресток. Если T-образный перекресток существует, управление переходит на этап S13. Если T-образный перекресток не существует, управление переходит на этап S14. На этапе S13 указание маршрута выводится речью на основании количества дорог ri, и управление возвращается. На этапе S14 указание маршрута выводится речью на основании количества перекрестков crj, и управление возвращается.
Однако в каждом из вариантов осуществления, описанных выше, указание маршрута для определяющего траекторию движения перекрестка c1 отображается посредством использования количества перекрестков или количества дорог, которые присутствуют от местоположения базисного транспортного средства до определяющего траекторию движения перекрестка c1 в каждой из точек h1 указания маршрута независимо от присутствия дорожного знака skg, и указание маршрута выводится речью с использованием сообщения, такого как «Поверните налево на второй дороге».
Однако, несмотря на то, что указание маршрута выводится речью, когда местоположение базисного транспортного средства изменяется, сопровождая перемещение транспортного средства, водитель может приходить в замешательство относительно того, достигло ли транспортное средство определяющего траекторию движения перекрестка c1, согласно указанию маршрута, при подсчете от любого заданного перекрестка или любой заданной дороги.
Таким образом, будет пояснен третий вариант осуществления настоящего изобретения, в котором указание маршрута речью может выполняться избирательно, в зависимости от ситуации поблизости от транспортного средства. Следует отметить, что части, имеющие конструкции, которые идентичны таковым у первого и второго вариантов осуществления, обозначены идентичными символами ссылок, и результаты этих вариантов осуществления содержат в себе результаты изобретения, которые вытекают из обладания идентичной конструкцией.
Фиг.11 - блок-схема последовательности операций способа, показывающая работу средства обработки указания согласно третьему варианту осуществления настоящего изобретения, и фиг.12 - схема, показывающая пример обработки указания согласно третьему варианту осуществления настоящего изобретения.
На схемах ri (i=1, 2, …) обозначает дороги, crj (j=1, 2, …) обозначает перекрестки, на которых пересекаются две или более заданных дорог, и sgk (k=1, 2, …) обозначает дорожные знаки. В дополнение, Rt обозначает заданный маршрут, а c1 является определяющим траекторию движения перекрестком, который показывает перекресток, на котором, среди перекрестков crj, заданный маршрут Rt1 был установлен из условия, чтобы транспортное средство поворачивало направо или налево.
В этом случае используется конфигурация, в которой дороги r1 и r2 пересекаются на перекрестке cr1, дороги r1 и r3 пересекаются на перекрестке cr2, а дороги r1 и r4 пересекаются на перекрестке cr3, заданный маршрут Rt проходит дорогу r1, выполняется правый поворот на перекрестке cr3, и перекресток cr3 служит в качестве определяющего траекторию перекрестка c1. В дополнение, знаки с sg1 по sg3 установлены на перекрестках с cr1 по cr3.
В этом варианте осуществления, подобно каждому из вариантов осуществления, описанных выше, прежде всего средство обработки определения достижения точки средства обработки маршрута определяет, является транспортное средство или нет приближающимся к определяющему траекторию движения перекрестку c1 и прибыло ли в точку указания заданного маршрута.
В этой связи в каждом из вариантов осуществления, описанных выше, когда транспортное средство подъезжает к определяющему траекторию движения перекрестку c1 и прибыло в точку указания заданного маршрута, средство обработки вычисления элемента ветвления средства обработки указания вычисляет подсчитываемые элементы ветвления, например, количество перекрестков crj, от местоположения базисного транспортного средства до определяющего траекторию движения перекрестка c1. Однако, как описано выше, несмотря на то, что указание маршрута выводится речью, когда местоположение базисного транспортного средства изменяется, сопровождая перемещение транспортного средства, бывают случаи, в которых, при отсчете от заданного перекрестка или любой заданной дороги, водитель может приходить в замешательство относительно того, достигло ли транспортное средство определяющего траекторию движения перекрестка c1 согласно указанию маршрута.
Таким образом, в настоящем варианте осуществления, в случае, когда может ожидаться, что количество перекрестков crj, которые подсчитаны средством обработки вычисления элемента ветвления, отлично от количества перекрестков crj, которые подсчитаны водителем, когда снабжается указанием маршрута, средство обработки приостановки подсчета средства обработки маршрута выполняет обработку приостановки подсчета, и подсчет количества перекрестков crj приостанавливается. Следует отметить, что средство обработки приостановки указания составлено средством обработки приостановки подсчета, средство обработки приостановки указания выполняет обработку приостановки указания, и указание маршрута приостанавливается приостановкой подсчета.
Таким образом, в случае, когда транспортное средство прибыло в точку указания заданного маршрута, средство обработки определения условий приостановки подсчета средства обработки указания выполняет обработку определения условий приостановки подсчета и определяет, предпочтительна или нет приостановка подсчета количества перекрестков crj, то есть применимы или нет условия приостановки. Следует отметить, что средство обработки определения условий приостановки указания составлено средством обработки определения условий приостановки подсчета, и средство обработки определения условий приостановки подсчета выполняет обработку определения условий приостановки подсчета и определяет, предпочтительна или нет приостановка указания маршрута на основании количества перекрестков crj, то есть применимы или нет условия приостановки указания.
В дополнение, на фиг.12, например, транспортное средство прибывает в точку указания заданного маршрута впереди перекрестка cr1, и средство обработки вычисления элемента ветвления вычисляет количество перекрестков crj от местоположения базисного транспортного средства до определяющего траекторию движения перекрестка c1. В случае, когда транспортное средство перемещается, как показано стрелкой W1, и проезжает перекресток cr1, в то время как средство обработки указания точки выводит речью сообщение, такое как «Поверните направо на третьей дороге», количество перекрестков crj от местоположения базисного транспортного средства до перекрестка crj изменяется между моментом времени, в который вывод речью начинается, и моментом времени, в который вывод речью завершается. Поэтому водителю трудно определять, должно или нет количество перекрестков crj подсчитываться с учетом перекрестка cr1, или должно подсчитываться без учета перекрестка cr1. Поэтому, когда было определено, что подсчет должен выполняться, учитывая перекресток cr1, водитель поворачивает направо на перекрестке cr3, а когда было определено, что подсчет должен выполняться без учета перекрестка cr1, водитель поворачивает налево на перекрестке, впередилежащем от перекрестка cr3, и невозможно вести транспортное средство с высокой точностью по заданному маршруту Rt.
Таким образом, в настоящем варианте осуществления, средство обработки определения условий приостановки подсчета вычисляет расстояние, которое транспортное средство будет проезжать, в то время как указание маршрута указывается речью, то есть расстояние Ls проезда периода уведомления определяет, присутствует или нет перекресток crj в пределах этого расстояния Ls проезда периода уведомления, и, в случае, когда перекресток crj присутствует, определяет, что условия приостановки подсчета применимы.
Для того чтобы выполнять это, средство обработки вычисления интервала приостановки подсчета средства обработки определения условий приостановки подсчета выполняет обработку вычисления интервала приостановки подсчета, считывает скорость v транспортного средства с датчика 44 (фиг.1) скорости транспортного средства и вычисляет интервал, в течение которого приостанавливается подсчет, то есть расстояние Ls проезда периода уведомления, которое олицетворяет интервал приостановки подсчета. Следует отметить, что средство обработки вычисления интервала приостановки указания составлено средством обработки вычисления интервала приостановки подсчета, и это средство обработки вычисления интервала приостановки указания выполняет обработку вычисления интервала приостановки указания и вычисляет интервал, в течение которого приостанавливается указание маршрута на основании количества перекрестков crj, то есть расстояние Ls проезда периода уведомления, которое олицетворяет интервал приостановки указания.
В этом случае, когда указание маршрута выводится речью, когда время от начала до конца вывода обозначено временем τa уведомления, расстоянием Ls проезда периода уведомления является:
Ls=τa×v.
Затем, средство обработки определения элемента ветвления средства обработки определения условий приостановки подсчета выполняет обработку определения элемента ветвления, считывается местоположение базисного транспортного средства и, одновременно, данные перекрестка (координаты перекрестка, ширина перекрестка в прямом направлении и тому подобное) считываются из части 16 хранения данных, и, когда начинается вывод речью, определяет, присутствует или нет перекресток crj в пределах интервала приостановки подсчета (интервала от местоположения базисного транспортного средства в пределах расстояния Ls проезда периода уведомления), и в случае, когда перекресток crj присутствует, определяется, что условия приостановки подсчета применимы.
Например, когда временем τa уведомления является 5[с], а скоростью v транспортного средства является 40[км/ч], скорость в секунду составляет около 11 [м/с], и, таким образом, расстоянием Ls проезда периода уведомления является:
La=5[с]×11[м/с]=55[м].
В дополнение, когда скоростью v транспортного средства является 60[км/ч], а скорость в секунду составляет около 17 [м/с], и, таким образом, расстоянием Ls проезда периода уведомления является:
Ls=5[c]×17[м/с]=85[м].
При этом способе, в настоящем варианте осуществления изобретения, в случае, когда перекресток crj присутствует в пределах расстояния Ls проезда периода уведомления, возможно вести транспортное средство с высокой точностью по заданному маршруту Rt, так как подсчет количества перекрестков crj приостанавливается.
Следует отметить, что, в случае, когда транспортное средство отводится от местоположения базисного транспортного средства сверх расстояния Ls проезда периода уведомления, условия приостановки подсчета прекращаются.
Затем будет пояснена блок-схема последовательности операций способа.
На этапе S21 система ожидает, чтобы транспортное средство подъехало к определяющему траекторию движения перекрестку c1. Если транспортное средство подъезжает к определяющему траекторию движения перекрестку c1, управление переходит на этап S22.
На этапе S22 определяется, применимы или нет условия приостановки подсчета. Если условия приостановки подсчета не применимы, управление переходит на этап S23, а если условия приостановки подсчета применимы, управление возвращается.
На этапе S23 подсчитывается количество перекрестков crj от местоположения базисного транспортного средства до определяющего траекторию движения перекрестка c1.
На этапе S24 указание маршрута выводится речью на основании количества перекрестков, а затем управление возвращается.
Затем будет пояснен четвертый вариант осуществления настоящего изобретения. Следует отметить, что части, имеющие конструкции, которые идентичны таковым у третьего варианта осуществления, обозначены идентичными символами ссылок, и результаты этих вариантов осуществления содержат в себе результаты изобретения, которые вытекают из обладания идентичной конструкцией.
Фиг.13 - схема, показывающая пример обработки указания согласно четвертому варианту осуществления настоящего изобретения.
В этом случае на фиг.13, например, транспортное средство прибывает в точку указания заданного маршрута впереди перекрестка cr1, и средство обработки вычисления элемента ветвления вычисляет количество перекрестков crj от местоположения базисного транспортного средства до определяющего траекторию движения перекрестка c1. В то время как средство обработки указания точки выводит речью сообщение, такое как «Поверните направо на третьем перекрестке», когда транспортное средство перемещается, как показано стрелками W2 и W3, и перекресток cr1 присутствует поблизости от точки, в которой завершается вывод речью, трудно определить количество перекрестков crj в любой заданный момент времени. Также, в этом случае, водителю трудно определять, должно или нет количество перекрестков crj подсчитываться, учитывая перекресток cr1, или должно подсчитываться без учета перекрестка cr1.
Таким образом, в настоящем варианте осуществления, средство обработки определения условий приостановки подсчета вычисляет расстояние Ls проезда периода уведомления, определяет, присутствует или нет перекресток crj поблизости от точки прибытия при проезде на протяжении расстояния Ls проезда периода уведомления, и, в случае, когда перекресток crj присутствует, определяет, что условия приостановки подсчета применимы.
Для того чтобы выполнять это, средство обработки вычисления интервала приостановки подсчета средства обработки определения условий приостановки подсчета считывает скорость v транспортного средства с датчика 44 скорости транспортного средства и вычисляет расстояние Ls проезда периода уведомления.
В этом случае, когда указание маршрута выводится речью, когда временем от начала до конца вывода является время τa уведомления, тогда расстоянием Ls проезда периода уведомления является:
Ls=τa×v.
В дополнение, средство обработки вычисления интервала приостановки подсчета добавляет буферное расстояние dLs для создания минимально необходимого запаса в расстоянии Ls проезда периода уведомления из условия, чтобы водителю не требовалось подсчитывать перекрестки crj в случае, когда транспортное средство достаточно отделено от перекрестка crj, а затем вычисляет расстояние Lst приостановки подсчета, которое олицетворяет интервал приостановки подсчета:
Lst=Ls+dLs
Следует отметить, что расстояние приостановки указания формируется расстоянием Lst приостановки подсчета.
Затем, средство обработки определения элемента ветвления считывает местоположение базисного транспортного средства и, одновременно, считывает данные перекрестка (координаты перекрестка, ширину перекрестка в прямом направлении и тому подобное) из части 16 хранения данных, и, когда начинается вывод речью, определяется, присутствует или нет перекресток crj в интервале приостановки подсчета (интервале от местоположения базисного транспортного средства в пределах расстояния Lst приостановки подсчета), и, в случае, когда перекресток crj присутствует, определяется, что такие условия приостановки подсчета применимы.
Например, когда временем τa уведомления является 5[с], а скоростью v транспортного средства является 40[км/ч], тогда скорость в секунду составляет около 11 [м/с], и, таким образом, расстоянием Ls проезда периода уведомления является:
La=55 [м].
В дополнение, когда буферным расстоянием dLs является 50 [м], тогда расстоянием Lst приостановки подсчета является 105 [м].
При этом способе, в настоящем варианте осуществления, в случае, когда перекресток crj присутствует в пределах расстояния Lst приостановки подсчета, так как подсчет количества перекрестков crj приостанавливается, можно вести транспортное средство с высокой точностью по заданному маршруту Rt.
Следует отметить, что, в случае, когда транспортное средство было отведено от местоположения базисного транспортного средства сверх расстояния Lst приостановки подсчета, условия приостановки подсчета прекращаются.
Однако на фиг.13, даже в случае, когда перекресток cr1 не отделен только буферным расстоянием dLs от перекрестка прямо впереди, водителю трудно определять, должно ли подсчитываться количество перекрестков crj, учитывая перекресток cr1, или должно подсчитываться без учета перекрестка cr1.
Таким образом, средство обработки определения условий приостановки подсчета вычисляет расстояние от перекрестка cr1 и перекрестка прямо впереди, то есть расстояние Lc между перекрестками, и, в случае, когда расстояние Lc между перекрестками короче, чем буферное расстояние dLs, также может определять, что условия приостановки подсчета применимы.
Для того чтобы выполнять это, средство обработки определения расстояния между перекрестками средства обработки определения условий приостановки подсчета выполняет обработку определения расстояния между перекрестками, считывает данные перекрестка (координаты перекрестка, ширину перекрестка в прямом направлении движения) из части 16 хранения данных, вычисляет расстояние между перекрестком cr1 и перекрестком прямо впереди, то есть расстояние Lc между перекрестками, и определяет, короче или нет расстояние Lc между перекрестками, чем буферное расстояние dLs.
В дополнение, в случае, когда расстояние Lc между перекрестками короче, чем буферное расстояние dLs, средство обработки определения элемента ветвления определяет, что перекресток crj находится в пределах интервала приостановки подсчета и определяет, что условия приостановки подсчета применимы.
При этом способе, в случае, когда расстояние Lc между перекрестками короче, чем буферное расстояние dLs, так как подсчет количества перекрестков crj приостанавливается, для транспортного средства является возможным перемещаться с высокой точностью по заданному маршруту Rt.
Следует отметить, что, в случае, когда транспортное средство было отведено от местоположения базисного транспортного средства сверх буферного расстояния dLs, условия приостановки подсчета прекращаются.
Затем будет пояснен пятый вариант осуществления настоящего изобретения. Следует отметить, что части, имеющие конструкции, которые идентичны таковым у третьего и четвертого вариантов осуществления, обозначены идентичными символами ссылок, и результаты этих вариантов осуществления содержат в себе результаты изобретения, которые вытекают из обладания идентичной конструкцией.
Фиг.14 - схема, показывающая пример обработки указания согласно пятому варианту осуществления настоящего изобретения.
В этом случае на фиг.14, например, транспортное средство прибывает в точку указания заданного маршрута впереди перекрестка cr1, средство обработки вычисления элемента ветвления вычисляет количество перекрестков crj от местоположения базисного транспортного средства до определяющего траекторию движения перекрестка c1. В то время как средство обработки указания точки является выводящим речью сообщение, такое как «Поверните направо на третьем перекрестке», транспортное средство движется, как показано стрелкой W4. Когда множество перекрестков crj присутствуют от точки, в которой заканчивается вывод речью, до определяющего траекторию движения перекрестка c1, в этом случае, также, водителю может быть трудно определять, должно ли количество перекрестков crj подсчитываться, учитывая перекресток cr1, или должно подсчитываться без учета перекрестка cr1.
Таким образом, в настоящем варианте осуществления изобретения, средство обработки определения условий приостановки подсчета вычисляет расстояние Ls проезда периода уведомления, определяет, присутствует или нет множество перекрестков crj от точки прибытия до определяющего траекторию движения перекрестка c1, в то время как транспортное средство перемещается на протяжении расстояния Ls проезда периода уведомления, и, в случае, когда перекрестки транспортного средства crj присутствуют, определяет, что условия приостановки подсчета применимы.
Для того чтобы выполнять это, средство обработки вычисления интервала приостановки подсчета средства обработки условий приостановки подсчета считывает скорость v транспортного средства с датчика 44 скорости транспортного средства и вычисляет расстояние Ls проезда периода уведомления. В этом случае, когда указание маршрута выводится речью, где временем от начала до конца вывода является время τa уведомления, расстоянием Ls проезда периода уведомления является:
Ls=τa×v.
Затем, средство обработки определения элемента ветвления считывает данные перекрестка (координаты перекрестка, ширину перекрестка в переднем направлении движения) из части 16 хранения данных (фиг.1), и в начале вывода речью, где точка окончания расстояния Ls проезда периода уведомления установлена в точку прибытия, определяет, присутствует или нет множество перекрестков crj от точки прибытия до определяющего траекторию движения перекрестка c1, и, в случае, когда множество перекрестков crj присутствует, определяет, что условия приостановки подсчета применимы.
При этом способе, в случае, когда множество перекрестков crj присутствует в интервале от точки прибытия до определяющего траекторию движения перекрестка c1, при прохождении расстояния Ls проезда периода уведомления, так как подсчет количества перекрестков crj приостанавливается, вывод речью выполняется в случае, когда только один перекресток cr3 (определяющий траекторию движения перекресток c1) присутствует в интервале от точки прибытия до определяющего направление движения перекрестка c1. Таким образом, возможно с высокой точностью вести транспортное средство по заданному маршруту Rt.
Следует отметить, что, в случае, когда транспортное средство было отведено вне пределов диапазона от местоположения базисного транспортного средства до определяющей траекторию движения точки c1, условия приостановки подсчета прекращаются.
Однако в каждом из вариантов осуществления изобретения, описанных выше, хотя условия приостановки подсчета прекращаются при проезде вплоть до заданной точки, в случае, когда точность выявления местоположения базисного транспортного средства датчиком 15 GPS (фиг.1) низка, могут быть случаи, когда нормально подсчет выполняется в местах, где подсчет должен приостанавливаться, так как условия приостановки подсчета были прекращены, и указание маршрута может выводиться речью.
Таким образом, будет пояснен шестой вариант осуществления настоящего изобретения, в котором подсчет не выполняется в местах, в которых подсчет должен приостанавливаться. Следует отметить, что части, имеющие конструкции, которые идентичны таковым у с третьего по пятый вариантов осуществления, обозначены идентичными символами ссылок, и результаты этих вариантов осуществления содержат в себе результаты изобретения, которые вытекают из обладания идентичной конструкцией. В дополнение, в настоящем варианте осуществления изобретения будет пояснен пример, который учитывает погрешность выявления в местоположении базисного транспортного средства в случае, когда подсчет приостанавливается в третьем варианте осуществления настоящего изобретения. Однако, в других вариантах осуществления, возможно учитывать погрешность выявления местоположения базисного транспортного средства.
Фиг.15 - схема, показывающая пример обработки указания согласно шестому варианту осуществления настоящего изобретения.
В этом случае средство обработки определения условий приостановки подсчета устанавливает погрешность ΔLs выявления местоположения базисного транспортного средства впереди и позади расстояния Ls проезда периода уведомления. Поэтому, в настоящем варианте осуществления, средство обработки вычисления интервала приостановки подсчета средства обработки определения условий приостановки подсчета считывает скорость v транспортного средства с датчика 44 транспортного средства, вычисляет расстояние Ls проезда периода уведомления, добавляет погрешность ΔLs для создания минимально необходимого запаса впереди и позади расстояния Ls проезда периода уведомления и вычисляет расстояние Lst приостановки подсчета, которое олицетворяет интервал приостановки подсчета:
Lst=Ls+2ΔLs.
Затем, средство обработки определения элемента ветвления считывает местоположение базисного транспортного средства и, одновременно, считывает данные перекрестка (координаты перекрестка, ширину перекрестка в прямом направлении и тому подобное) из части 16 хранения данных, и, когда начинается вывод речью, определяет, присутствует или нет перекресток crj в интервале приостановки подсчета (интервале от местоположения базисного транспортного средства в пределах расстояния Lst приостановки подсчета), и, в случае, когда перекресток crj присутствует, определяет, что такие условия приостановки подсчета применимы.
Следует отметить, что настоящее изобретение не ограничено тем или другим вариантами осуществления, описанными выше. Могут создаваться различные варианты осуществления, основанные на назначении настоящего изобретения, и предполагается, что будут учтены все модификации в пределах сущности и объема настоящего изобретения.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Настоящее изобретение может использоваться в устройстве навигации.
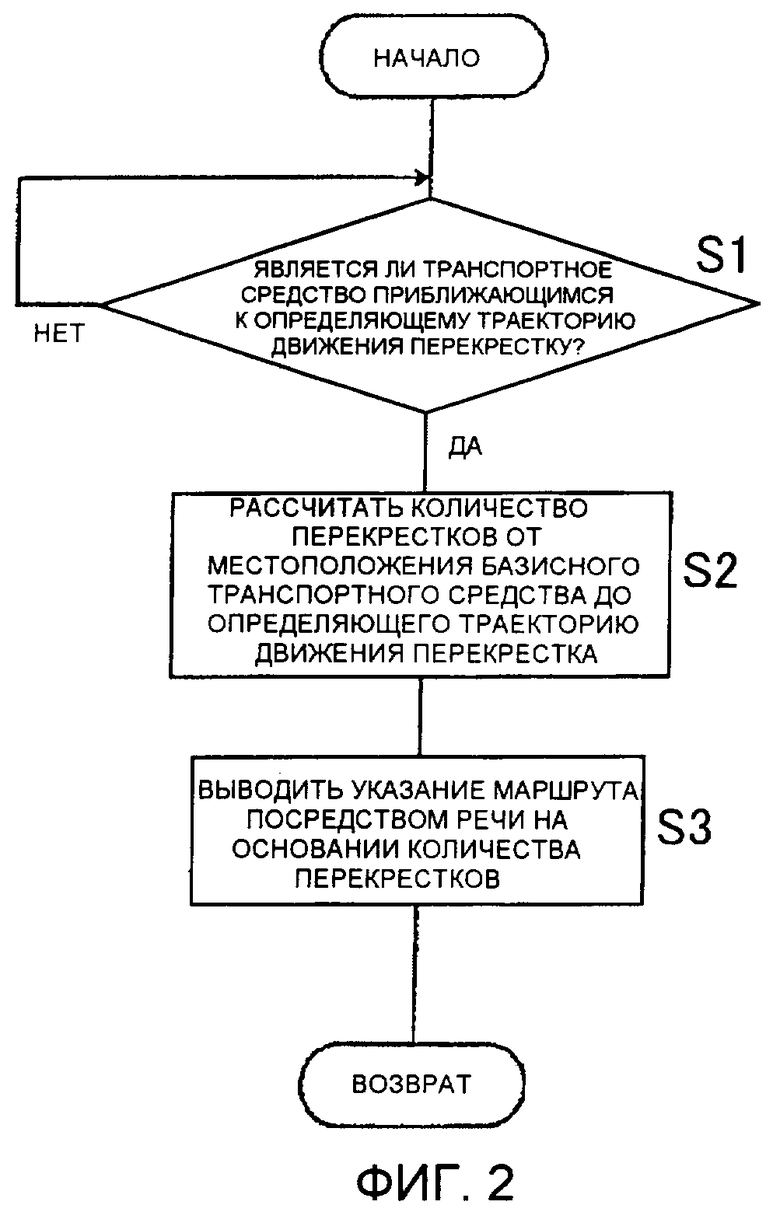

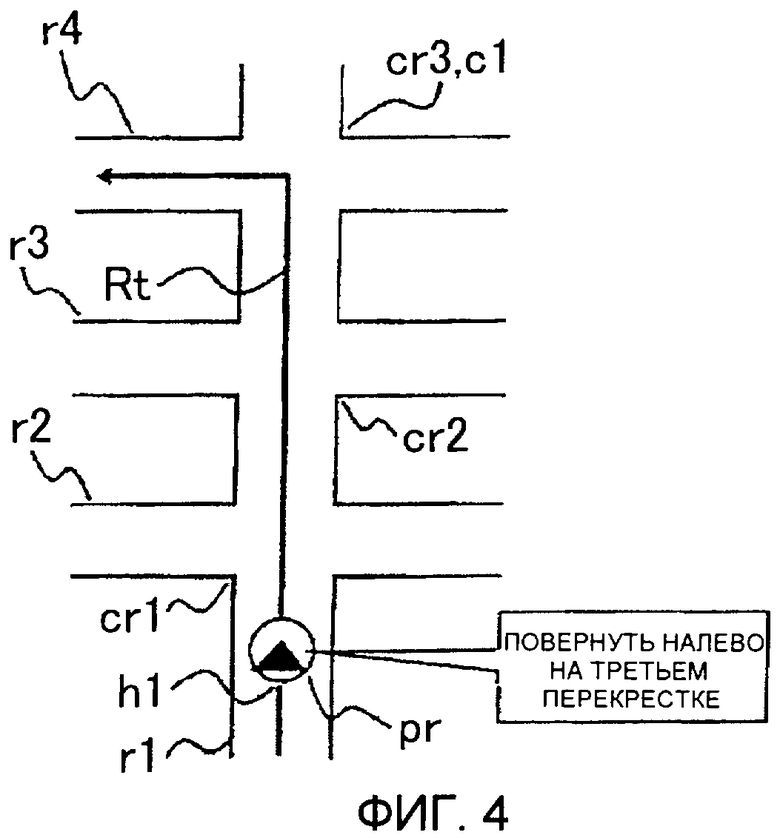


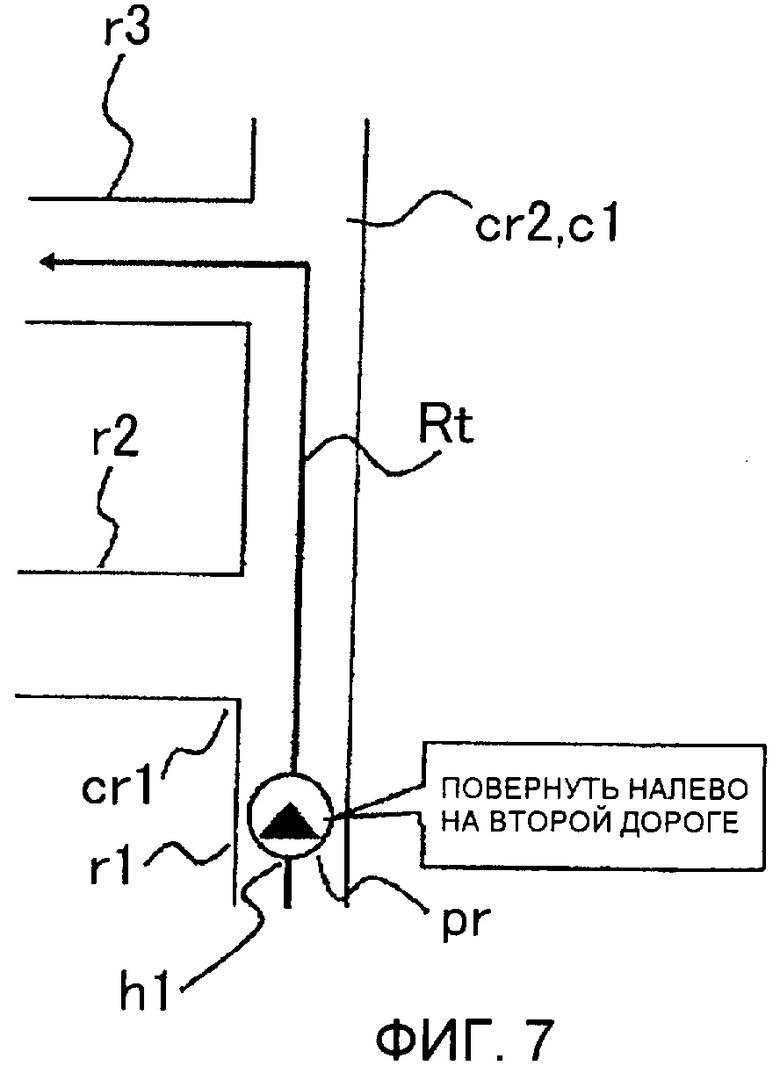

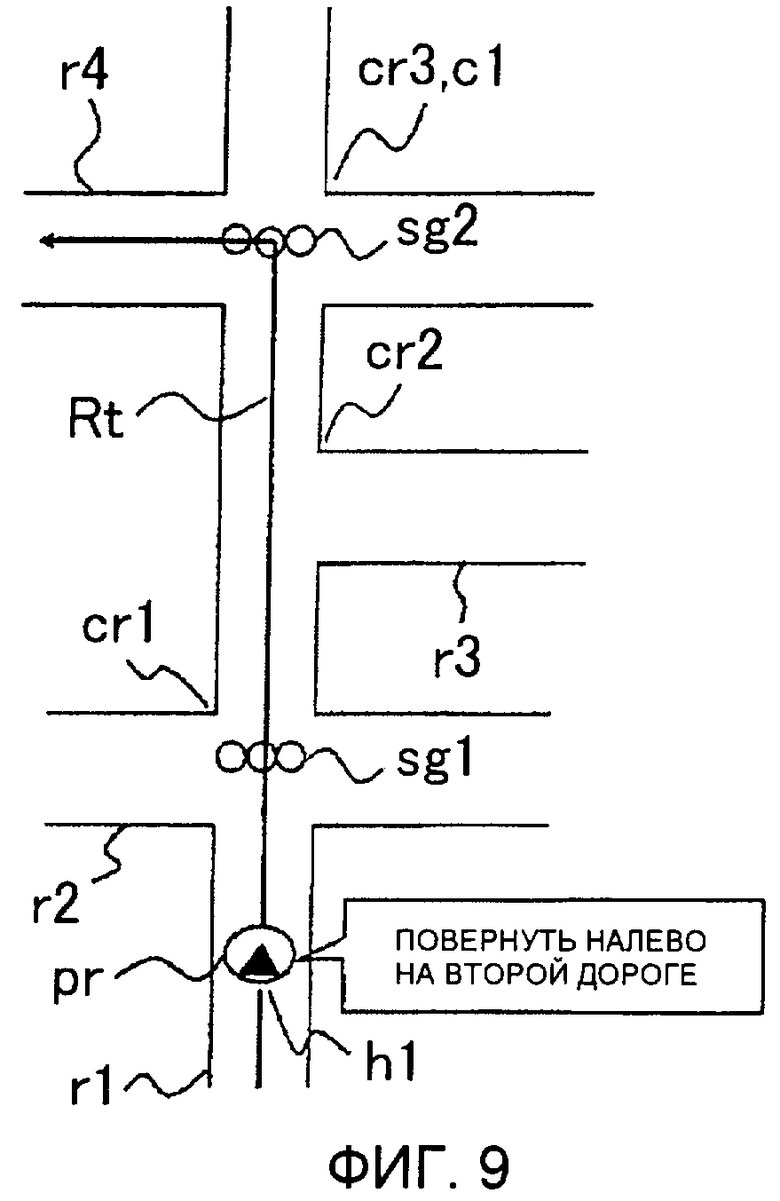



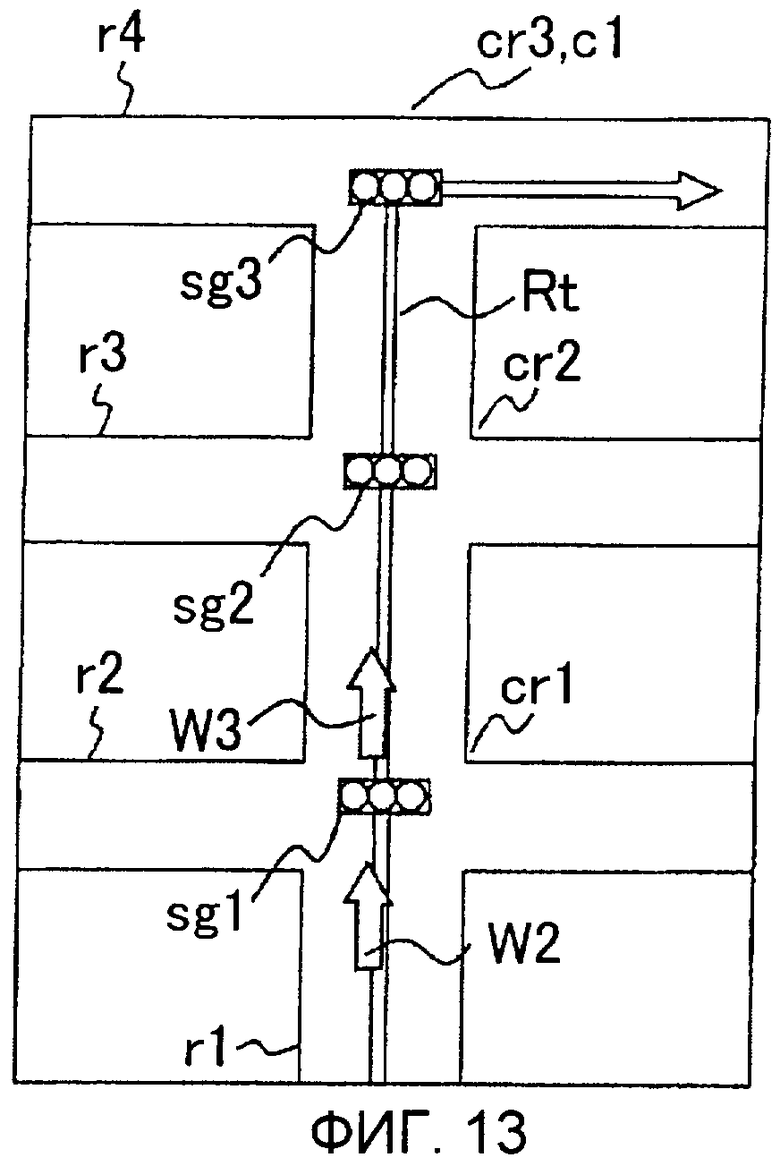


Изобретение относится к системе указания маршрута и способу указания маршрута. Система указания маршрута включает в себя часть выявления текущего местоположения, средство обработки поиска маршрута и средство обработки указания. Средство обработки указания включает в себя средство обработки вычисления элемента ветвления, которое вычисляет количество элементов ветвления от местоположения базисного транспортного средства до определяющей траекторию движения точки, и средство обработки указания точки, которое выполняет указание маршрута на основании вычисленного количества элементов ветвления. Вычисляется количество элементов ветвления от местоположения базисного транспортного средства до определяющей траекторию движения точки, и указание маршрута выполняется на основании вычисленного количества элементов ветвления, таким образом, является возможным несложно опознавать определяющую траекторию движения точку посредством подсчета количества элементов ветвления, независимо от количества дорожных знаков, которые существуют между местоположением базисного транспортного средства и определяющей траекторию движения точкой. Технический результат - предоставление возможности водителю безошибочно опознавать определяющий направление движения перекресток 2 н. и 5 з.п. ф-лы, 15 ил.
1. Система указания маршрута, содержащая
часть выявления текущего местоположения, которая выявляет текущее местоположение базисного транспортного средства в качестве местоположения базисного транспортного средства;
средство обработки поиска маршрута, которое отыскивает заданный маршрут до пункта назначения на основании местоположения базисного транспортного средства;
средство обработки указания, которое устанавливает точку указания маршрута в заданном месте на заданном маршруте до определяющей траекторию движения точки, и которое выполняет указание маршрута до определяющей траекторию движения точки, когда транспортное средство прибывает в точку указания маршрута, при этом
средство обработки указания включает в себя
средство обработки вычисления элемента ветвления, которое вычисляет количество элементов ветвления от местоположения базисного транспортного средства до определяющей траекторию движения точки;
средство обработки определяющей траекторию движения точки, которое выполняет указание маршрута на основании вычисленного количества элементов ветвления,
средство обработки определения условий приостановки указания для определения, применимы или нет условия приостановки указания, и
средство обработки приостановки указания, которое, в случае, в котором применимы условия приостановки указания, приостанавливает указание маршрута на основании количества элементов ветвления;
причем средство обработки определения условий приостановки указания вычисляет расстояние проезда периода уведомления на основании времени уведомления от начала до конца вывода речевого указания скорости транспортного средства во время предоставления указания маршрута и определяет, применимы или нет условия приостановки указания, на основании отношения между позициями расстояния проезда периода уведомления от точки расстояния маршрута и ветвления.
2. Система указания маршрута по п.1, в которой элементами ветвления являются перекрестки.
3. Система указания маршрута по п.1, в которой элементами ветвления являются дороги.
4. Система указания маршрута по п.3, в которой дороги являются дорогами, которые тянутся в таком же направлении, как выезд из определяющей траекторию движения точки.
5. Система указания маршрута по п.1, в которой
средство обработки указания включает в себя средство обработки определения дорожного знака, которое определяет, существует или нет дорожный знак в определяющей траекторию движения точке; и
если дорожный знак существует в определяющей траекторию движения точке, средство обработки указания точки факторизует существование дорожного знака в указание маршрута, которое основано на количестве элементов ветвления.
6. Система указания маршрута по п.1, в которой
средство обработки указания включает в себя
средство обработки определения особого элемента ветвления, которое определяет, существует или нет особый элемент ветвления, который водитель, возможно, мог бы подсчитать по ошибке; и
средство обработки задержки, которое, если особый элемент ветвления существует, задерживает указание маршрута, затем выполняет указание маршрута после того, как транспортное средство проехало особый элемент ветвления.
7. Способ указания маршрута, содержащий этапы, на которых
выявляют текущее местоположение базисного транспортного средства в качестве местоположения базисного транспортного средства;
отыскивают заданный маршрут до пункта назначения на основании местоположения базисного транспортного средства;
устанавливают точку указания маршрута в заданном месте на заданном маршруте до определяющей траекторию движения точки;
вычисляют количество элементов ветвления от местоположения базисного транспортного средства до определяющей траекторию движения точки;
выполняют указание маршрута до определяющей траекторию движения точки, когда транспортное средство прибывает в точку указания маршрута, на основании вычисленного количества элементов ветвления;
вычисляют расстояние проезда периода уведомления на основании времени уведомления от начала до конца вывода речевого указания скорости транспортного средства во время предоставления указания маршрута и определяют, применимы или нет условия приостановки указания на основании отношения между позициями расстояния проезда периода уведомления от точки расстояния маршрута и ветвления; и
приостанавливают указание маршрута на основании количества элементов ветвления в случае, в котором применимы условия приостановки указания.
| Цилиндрический триер | 1979 |
|
SU874221A1 |
| СПОСОБ КОРРЕКЦИИ И НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ СЧИСЛЕНИЯ ПУТИ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2151379C1 |
| KR 100262060 В1, 15.07.2000 | |||
| Устройство для измерения угловых перемещений объекта | 1987 |
|
SU1441199A1 |
| US 2004044471 А1, 04.03.2004. | |||

