ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу и системе эксплуатации транспортного средства. В частности, изобретение относится к способу и системе эксплуатации транспортного средства в ситуациях, когда существует уменьшенная потребность в мощности для приведения в движение транспортного средства. Настоящее изобретение также относится к транспортному средству и компьютерной программе и компьютерному программному продукту, который осуществляет способ согласно изобретению.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
В настоящее время системы круиз-контроля являются общепринятыми в автомобильных транспортных средствах, например автомобилях, грузовиках и автобусах. Задача системы круиз-контроля заключается в достижении заданной равномерной скорости транспортного средства, и система круиз-контроля может быть традиционного типа, направленного на постоянную скорость транспортного средства. Это может быть достигнуто путем приспособления крутящего момента двигателя к исключению торможения, например, путем увеличения крутящего момента двигателя при подъеме. Общая задача системы круиз-контроля заключается в достижении удобной эксплуатации транспортного средства и также большего комфорта для его водителя.
Водитель транспортного средства с функцией круиз-контроля обычно устанавливает скорость Vcc, которая является желаемой им/ей скоростью, которую транспортное средство поддерживает до тех пор, пока функция круиз-контроля по какой-либо причине не будет отключена. Далее система круиз-контроля определяет расчетную скорость Vref, которую она требует от участка системы управления транспортного средства, которая управляет двигателем транспортного средства, например блока управления двигателем.
Если функция круиз-контроля относится к традиционному типу, как указано выше, Vref будет равна заданной скорости Vcc, в этом случае транспортное средство постоянно стремится поддерживать скорость Vcc, заданную водителем. Таким образом, функция круиз-контроля этого вида заставляет транспортное средство стремиться поддерживать заданную скорость независимо от того, осуществляет ли оно подъем, спуск или перемещение по горизонтальной поверхности движения. Это означает, что транспортное средство может ускоряться на вершине возвышенности, что вызывает необходимость немедленного торможения при последующем спуске для исключения превышения заданной скорости Vcc. Таким образом, этот способ является неэкономичным способом эксплуатации транспортного средства, особенно в случае тяжелых транспортных средств.
Как правило, происходит так, что кроме закупочной стоимости транспортного средства, основные статьи расходов в ходе его текущей эксплуатации содержат зарплату водителя, расходы на ремонт и обслуживание и топливо для приведения в движение транспортного средства, при этом стоимость топлива может очень сильно влиять на рентабельность для владельца транспортного средства, например компании по грузовым перевозкам или т.п.
По этой причине имеются функции, которые стремятся изменять режим эксплуатации транспортного средства на основе знания его маршрута так, что расход топлива может сохраняться максимально низким. Это может, например, быть достигнуто посредством функций круиз-контроля, посредством чего может быть допущено отклонение расчетной скорости Vref от скорости Vset, выбранной водителем на основе знания маршрута транспортного средства, чтобы тем самым эксплуатировать транспортное средства более топливоэкономичным способом.
Примером такой системы круиз-контроля является система, которая использует так называемую функцию "упреждения". Система круиз-контроля с упреждением (LACC) представляет собой систему круиз-контроля, которая использует знание участков дороги впереди, т.е. знание характера предстоящего маршрута транспортного средства, чтобы определять сигнал расчетной скорости Vref и таким образом также изменять скорость транспортного средства согласно изменениям дороги, вдоль которой транспортное средство перемещается.
Тяжелые транспортные средства часто имеют коробки передач с автоматическим управлением, посредством чего переключения передач осуществляются посредством подходящей бортовой системы управления, например, системы управления коробкой передач. Система содействия LACC транспортного средства также может в значительной степени управляться одной или более системами управления транспортного средства так, что транспортное средство эксплуатируется максимально экономично, например, в некоторой степени уменьшая его скорость в конце подъема, сопровождаемого сразу после него спуском, на котором транспортное средство будет подвергаться воздействию составляющей положительной силы, обеспеченной силой тяжести в направлении перемещения, делая возможным для транспортного средства ускорение без какой-либо положительной движущей силы от его двигателя.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является предложение способа эксплуатации транспортного средства, который может дополнительно уменьшать расход топлива транспортных средств, приводимых в движение двигателем внутреннего сгорания, особенно при движениях на спуске. Эта задача решается с помощью способа согласно п. 1 формулы изобретения.
Настоящее изобретение относится к способу эксплуатации транспортного средства, обеспеченного двигателем внутреннего сгорания, который может быть выборочно соединен с по меньшей мере одним карданным валом для обеспечения движущей силой карданного вала для приведения в движение транспортного средства. Когда транспортное средство находится в движении, способ содержит этапы, на которых:
когда транспортное средство приближается к спуску, определяют, может ли двигатель быть отсоединен от указанного по меньшей мере одного карданного вала на по меньшей мере первый период времени, и
когда двигатель может быть отсоединен от по меньшей мере одного карданного вала на по меньшей мере первый период времени, отсоединяют двигатель от по меньшей мере одного карданного вала на первый период времени, во время которого двигатель также выключается.
Это дает преимущество в том, что расход топлива транспортного средства может быть дополнительно уменьшен по сравнению с уменьшением, ранее достигнутым известным уровнем техники. Согласно настоящему изобретению, это выполняется не только путем отсоединения двигателя от ведущих колес транспортного средства, но также путем его выключения на период времени, когда он отсоединен от карданного вала. Это также выполняется только в ситуациях, когда выключение двигателя считается выгодным, что в связи с этим достигается путем определения того, является ли возможным выключение двигателя на по меньшей мере первый период времени.
Это определение может, например, быть выполнено посредством функции упреждения, как указано выше, т.е. на основе данных об уклонах маршрута транспортного средства и/или на основе данных о дорожной топографии маршрута транспортного средства. Такие данные могут использоваться предпочтительно в сочетании с текущим местоположением транспортного средства, которое может, например, быть получено посредством системы позиционирования и/или навигации, например спутниковой системы позиционирования, чтобы предсказывать случаи во время пути, когда будет выгодным отсоединение двигателя от ведущих колес и также выключение двигателя. Первый период времени может, например, содержать определенное количество секунд, например, любое требуемое количество секунд в пределах диапазона 2-60 секунд.
Первый период также может быть задан на различных основаниях. Он может, например, быть основан на экономии топлива при выключении двигателя, и он может, например, содержать период времени, который по меньшей мере приводит к уменьшенному расходу топлива, соответствующему расходу топлива, возникающему при запуске двигателя стартерным двигателем.
Выключение двигателя согласно настоящему изобретению позволяет достичь уменьшенного расхода топлива не только относительно ситуаций, когда двигатель только отсоединен от ведущих колес, но и относительно ситуаций, в которых, что ранее считалось очевидным, транспортное средство должно эксплуатироваться при двигателе, соединенном с карданным валом, но без подачи топлива. Настоящее изобретение приводит к еще более низкому расходу топлива, когда транспортное средство, так как его ведущие колеса не подвергаются воздействию какого-либо тормозного усилия двигателя, может перемещаться с отсоединенным двигателем на большее расстояние после прохождения спуска, так как с отсоединенным двигателем оно будет достигать более высокой скорости при спуске, чем с двигателем, соединенным с его ведущими колесами.
Более того, снова вследствие того, что ведущие колеса не подвержены воздействию какого-либо тормозного усилия двигателя, скорость транспортного средства будет уменьшаться медленнее, делая возможным перемещение с отсоединенным двигателем дальше за пределы конца спуска, чем с двигателем, соединенным с ведущими колесами.
Это означает, что в случаях, когда транспортное средство движется быстрее, чем, например, заданная скорость системы круиз-контроля на конце спуска, оно может перемещаться на большее расстояние после конца спуска до тех пор, пока его скорость не упадет до заданной скорости, и в связи с этим силовая передача должна быть включена, чтобы позволить двигателю обеспечивать движущую силу в направлении перемещения транспортного средства.
Таким образом, настоящее изобретение делает возможным уменьшение расхода топлива при спуске транспортных средств, приводимых в движение двигателем внутреннего сгорания.
Вариант выполнения настоящего изобретения не осуществляет определение того, может ли двигатель быть отсоединен от по меньшей мере одного карданного вала на по меньшей мере первый период времени, но определяет вместо этого, должен ли он быть запущен посредством его стартерного двигателя или путем повторного соединения с ведущими колесами.
Дополнительные характеристики настоящего изобретения и его преимущества указаны с помощью подробного описания примеров вариантов выполнения, изложенных ниже, и приложенных чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1A изображает силовую передачу в транспортном средстве, в котором настоящее изобретение может быть использовано;
Фиг. 1B изображает блок управления в системе управления транспортного средства;
Фиг. 2 иллюстрирует пример способа согласно настоящему изобретению.
ОПИСАНИЕ ПРЕДПОЧИТЕЛЬНЫХ ВАРИАНТОВ ВЫПОЛНЕНИЯ
Фиг. 1A схематически изображает силовую передачу в транспортном средстве 100, согласно варианту выполнения настоящего изобретения. Силовая передача содержит двигатель 101 внутреннего сгорания, который соединен традиционным образом через выходной вал двигателя, обычно через маховик 102, с входным валом 109 коробки передач 103 через сцепление 106. Сцепление может, например, принимать форму автоматически управляемого сцепления и управляться системой управления транспортного средства с помощью блока 110 управления. Блок 110 управления также управляет коробкой передач 103. Транспортное средство 100 дополнительно содержит карданные валы 104, 105, которые соединены с ведущими колесами 113, 114 транспортного средства и приводятся в движение посредством выходного вала 107 от коробки передач 103 через шестерню 108 полуоси, например традиционный дифференциал. Также обеспечен стартерный двигатель 115 для запуска двигателя 101.
Транспортное средство 100 дополнительно содержит различные тормозные системы, например традиционную рабочую тормозную систему, которая может, например, содержать тормозные диски с соответственными тормозными накладками (не изображены), расположенными смежно каждому колесу. Рабочая тормозная система управляется системой управления транспортного средства посредством блока 111 управления тормозами, который традиционным образом передает сигналы, например, регулятору или регуляторам, которые регулируют тормозное усилие в рабочей тормозной системе.
Блок 111 управления тормозами также может быть выполнен с возможностью управления другими тормозными системами на борту транспортного средства, а также рабочей тормозной системой. Тяжелые транспортные средства часто обеспечены дополнительными тормозными системами, например, в виде традиционных замедлителей 112 и/или других дополнительных тормозных систем, например, различных видов систем торможения дросселированием выхлопа, систем компрессионного тормоза, электромагнитных тормозных систем и систем торможения двигателем. На основе команд, инициированных водителем транспортного средства и/или другими блоками управления, блок 111 управления передает управляющие сигналы подходящим модулям системы, чтобы требовать необходимое тормозное усилие. Дополнительные тормозные системы также могут управляться непосредственно водителем, например, с помощью кнопок или педалей, в этом случае педаль или рычаг могут быть непосредственно соединены с другим блоком управления, который передает информацию, например, блоку управления замедлителем.
Системы управления в современных транспортных средствах в общем содержат систему шин связи, содержащую одну или более шин связи для соединения вместе нескольких электронных блоков управления (ECU) или контроллеров и различных компонентов на борту транспортного средства. Такая система управления может содержать большое количество блоков управления, и ответственность за конкретную функцию может быть разделена между двумя или несколькими из них. В связи с этим, транспортные средства рассматриваемого здесь типа часто обеспечены значительно большим количеством блоков управления, чем изображено на Фиг. 1A, что несомненно будет понятно специалисту в области техники. Транспортное средство, изображенное на Фиг. 1A, также обеспечено блоком 130 управления, в котором функция упреждения реализована для использования, например, так называемой системой круиз-контроля с упреждением (LACC), которая упомянута выше.
В изображенном варианте выполнения настоящее изобретение осуществлено в блоке 130 управления, но также может быть осуществлено полностью или частично в одном или более других блоках управления, уже находящихся на борту транспортного средства, или блоке управления, предназначенном для настоящего изобретения.
Таким образом, управление, осуществляемое блоком 110 управления над коробкой передач 103, будет зависеть не только от, например, блока 119 управления двигателем, но и от информации, принимаемой от блока 130 управления.
Блоки управления рассматриваемого здесь типа обычно выполнены с возможностью приема сигналов датчиков от различных частей транспортного средства, например, блок 110 управления может принимать сигналы датчиков от коробки передач 103 и сигналы от, например, блока 111 управления тормозами и блока 119 управления двигателем, а также блока 130 управления. Блоки управления рассматриваемого здесь типа также обычно выполнены с возможностью подачи управляющих сигналов различным частям и компонентам транспортного средства. В настоящем примере блок 130 управления подает сигналы блоку 110 управления, который сам подает сигналы различным управляющим устройствам, чтобы требовать необходимые передаточные отношения в коробке передач 103 и выключение/включение сцепления 106.
Управление часто регулируется запрограммированными инструкциями, обычно в виде компьютерной программы, которая при выполнении на компьютере или блоком управления побуждает компьютер/блок управления осуществлять требуемые формы управляющего воздействия, например этапы способа согласно настоящему изобретению.
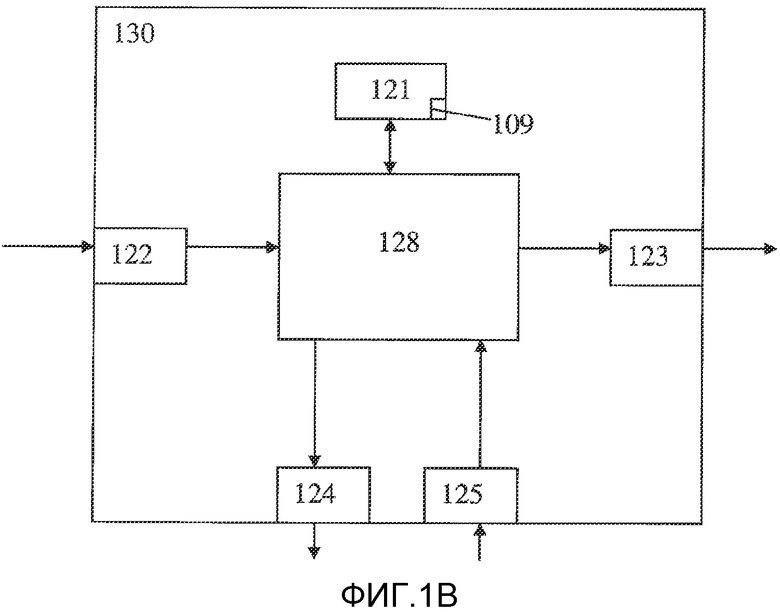
Компьютерная программа обычно принимает вид компьютерного программного продукта 129, который хранится на цифровом носителе 121 данных (смотри Фиг. 1B), например ROM (постоянном запоминающем устройстве), PROM (программируемом постоянном запоминающем устройстве), EPROM (стираемом программируемом постоянном запоминающем устройстве), флэш-памяти, EEPROM (электрически стираемом программируемом постоянном запоминающем устройстве), блоке жесткого диска и т.д., в или соединенном с блоком управления, и который выполняется блоком управления. В связи с этим, поведение транспортного средства в конкретной ситуации является преобразуемым путем изменения инструкций компьютерной программы.
Пример блока управления (блока 130 управления) схематически изображен на Фиг. 1B, причем он по возможности содержит вычислительный блок 128, который может, например, принимать форму некоторого подходящего типа процессора или микрокомпьютера, например, схемы для цифровой обработки сигналов (цифрового сигнального процессора, DSP) или схемы с заданной определенной функцией (специализированной интегральной схемы, ASIC). Вычислительный блок 128 соединен с блоком 121 памяти, который обеспечивает его, например, записанным программным кодом 129 и/или записанными данными, которые нужны вычислительному блоку, чтобы он имел возможность выполнять вычисления. Вычислительный блок 128 также выполнен с возможностью хранения промежуточных или итоговых результатов вычислений в блоке 121 памяти.
Блок управления дополнительно обеспечен соответственными устройствами 122, 123, 124, 125 для приема и передачи входных и выходных сигналов. Эти входные и выходные сигналы могут содержать колебания, импульсы или другие признаки, которые устройства 122, 125 приема входного сигнала могут обнаруживать в качестве информации и которые могут быть преобразованы в сигналы, которые вычислительный блок 128 может обрабатывать. В связи с этим, эти сигналы передаются вычислительному блоку 128. Устройства 123, 124 передачи выходного сигнала выполнены с возможностью преобразования сигналов, принятых от вычислительного блока 128, например, путем их модуляции для того, чтобы создавать выходные сигналы, которые могут быть переданы другим частям системы управления транспортного средства и/или компоненту/компонентам, для которого(ых) сигналы предназначены. Каждое из соединений с соответственными устройствами для приема и передачи входных и выходных сигналов может принимать форму одного или более из кабеля, шины данных, например, шины CAN (сети контроллеров), шины MOST (передачи данных мультимедийных систем) или некоторой другой конфигурации шины или беспроводного соединения.
В ситуациях с транспортным средством, когда существует или будет существовать уменьшенная потребность в мощности для приведения в движение, например на спусках, могут быть приняты меры, которые указаны выше, для уменьшения расхода топлива. В зависимости от угла уклона спуска на транспортное средство 100 будет действовать большая или меньшая положительная сила в направлении его перемещения, т.е. уклон будет заставлять силу тяжести прилагать в направлении перемещения транспортного средства составляющую положительной силы, тем самым помогая приведению в движение транспортного средства и вследствие этого уменьшая или полностью исключая, в зависимости от угла уклона, необходимость движущей силы от двигателя 101.
Например, транспортное средство может эксплуатироваться в режиме, при котором двигатель 101 отсоединен от ведущих колес 113, 114, т.е. силовая передача выключена. Это отсоединение путем выключения силовой передачи может, например, быть достигнуто путем установки коробки передач 103 в нейтральное положение или путем размыкания сцепления 106. Отсоединение двигателя от ведущих колес, когда транспортное средство находится в движении, далее называется движение накатом.
При другом методе эксплуатации, когда существует или будет существовать уменьшенная потребность в мощности для приведения в движение, транспортное средство находится в режиме включенной силовой передачи, т.е. с двигателем, соединенным с ведущими колесами, и в то же время включенной подачей топлива в двигатель. Преимущество этого режима эксплуатации транспортного средства заключается в том, что, так как подача топлива в двигатель выключена, его расход топлива также будет равен нулю. Это мера, однако, означает, что двигатель будет приводиться в движение ведущими колесами через силовую передачу, такая ситуация известна как "движение с двигателем, оказывающим сопротивление", в которой внутренние потери в двигателе приводят к тормозному усилию/отрицательной движущей силе на ведущих колесах, т.е. транспортное средство тормозит двигателем.
Внутренние потери в двигателе обычно связаны с его частотой вращения таким образом, что они увеличиваются при увеличенной частоте вращения двигателя, и в результате также тормозное усилие двигателя, таким образом, движение с двигателем, оказывающим сопротивление, обычно осуществляется при максимально высокой передаче, зацепленной в коробке передач (т.е. при максимально низком передаточном отношении), чтобы максимально уменьшать частоту вращения двигателя и в результате также его потери во время движения с двигателем, оказывающим сопротивление.
В случае движения накатом, однако, ведущие колеса совсем не подвергаются действию какого-либо тормозного эффекта двигателя, это означает, что транспортное средство будет катиться более легко при спуске и, тем самым, также достигать более высокой скорости на конце спуска по сравнению с движением с двигателем, оказывающим сопротивление. Это увеличение скорости, однако, достигается за счет расхода топлива, требуемого для поддержания работы двигателя на холостом ходу.
В зависимости от характера спуска различные методы его преодоления могут быть по-разному выгодными. Заявка на патент-аналог Швеции 1150529-4 под названием "METHOD AND SYSTEM PERTAINING TO VEHICLES II" с тем же автором, заявителем и датой подачи, что и у настоящей заявки, и заявка на патент-аналог Швеции 1150527-8 под названием "METHOD AND SYSTEM PERTAINING TO VEHICLE I", также с тем же автором, заявителем и датой подачи, что и у настоящей заявки, представляют примеры методов уменьшения расхода топлива транспортного средства, когда оно по меньшей мере частично эксплуатируется при движении накатом.
Заявка "METHOD AND SYSTEM PERTAINING TO VEHICLE I" описывает конкретно способ, при котором движение накатом является выгодным в ситуациях, когда движение с двигателем, оказывающим сопротивление, подобным образом привело бы к увеличению скорости, а движение накатом с самого начала не было применено. Настоящее изобретение также является применимым в таких ситуациях, которые в связи с этим описаны более подробно в указанной заявке на патент. Она также описывает, как движение накатом будет, в общем, приводить к уменьшенному расходу топлива по сравнению с движением с двигателем, оказывающим сопротивление, и причина этого также подробно описана в указанной заявке на патент.
Характер расхода топлива отличается при эксплуатации соответственно в режиме, в котором двигатель оказывает сопротивление, и режиме, в котором транспортное средство движется накатом. Как упомянуто ранее и как описано подробно в указанной заявке на патент "METHOD AND SYSTEM PERTAINING TO VEHICLES I", расход топлива, возникающий при поддержании работы двигателя на холостом ходу во время движения накатом уравновешивается более низким сопротивлением движению за счет ведущих колес, не подверженных воздействию какого-либо тормозного усилия двигателя. Более низкое сопротивление движению означает, что транспортное средство может перемещаться с отсоединенным двигателем на большее расстояние после прохождения спуска, частично так как оно будет достигать более высокой скорости при спуске по сравнению с движением с двигателем, соединенным с ведущими колесами, и частично так как ведущие колеса не подвергаются воздействию какого-либо тормозного усилия двигателя, скорость транспортного средства будет уменьшаться медленнее, чем при движении с двигателем, оказывающим сопротивление, даже при одинаковой начальной скорости.
Настоящее изобретение, однако, делает возможным уменьшение расхода топлива дополнительно в ситуациях, когда существует или будет существовать уменьшенная потребность в движущей силе, например, до/на спуске.
Пример способа 200 изображен на Фиг. 2, начинается с этапа 201, на котором определяют, приближается ли транспортное средство к спуску. Это определение может выполняться непрерывного, пока не будет определено, что транспортное средство достигло спуска в течение, например, определенного времени, например определенного количества секунд, или в пределах определенного расстояния, например определенного количества метров, например 100 м, 200 м, 300 м и т.д.
Это определение может быть осуществлено посредством функции упреждения, например, функции упреждения для системы круиз-контроля с упреждением (LACC), которая может, в связи с этим, быть осуществлена в блоке 130 управления на Фиг. 1A. Функция LA также может быть осуществлена в любом другом бортовом блоке управления. Как указано выше, система LACC использует знание характера дороги впереди, чтобы изменять скорость транспортного средства согласно преобладающим обстоятельствам. Знание участка дороги впереди может, например, содержать преобладающую топографию, изгиб дороги, дорожную обстановку, состояние дороги и ограничения скорости для участка впереди, а также дорожные знаки, расположенные рядом с дорогой.
На основе этой информации, полученной с использованием функции LA, и информации о местоположении транспортного средства, которая может, например, быть получена в виде информации от подходящих систем позиционирования/навигации, например, телематической системы и/или спутниковой навигационной системы, например, информации системы GPS (системы глобального позиционирования), функция LA может оценивать, сколько времени и/или какое расстояние остается до предстоящего спуска. Метеорологические сводки/данные от климатических камер также могут быть использованы, когда, например, сильные попутные/встречные ветра могут влиять на движущую силу, требуемую для приведения в движение транспортного средства.
Когда после этого на этапе 201 она обнаруживает, что транспортное средство приближается к спуску, по возможности в то время, когда оно еще на подъеме или на горизонтальной поверхности движения, способ переходит на этап 202.
Этап 202 определяет, должно ли происходить уменьшение скорости до предстоящего спуска. Система LACC делает возможным в значительной степени управление транспортным средством с помощью системы управления транспортного средства так, что транспортное средство эксплуатируется максимально экономично, например, уменьшая его скорость на конце подъема или вдоль горизонтального участка дороги, ведущего к спуску, на котором положительный вклад от силы гравитации будет ускорять транспортное средство без какого-либо вклада от его двигателя.
Это уменьшение скорости может быть осуществлено движением с двигателем, оказывающим сопротивление, но и по меньшей мере частично движением накатом. Вышеуказанная заявка на патент-аналог Швеции 1150529-4 под названием "METHOD AND SYSTEM FOR RUNNING OF VEHICLES II" описывает способ, при котором транспортное средство уже движется накатом до достижения спуска. Согласно варианту выполнения, уменьшение скорости до спуска согласно способу, описанному в указанной заявке на патент, достигается движением накатом. Если этап 202 определяет, что уменьшение скорости должно быть осуществлено движением накатом, способ переходит на этап 203, который отсоединяет двигатель от ведущих колес для достижения уменьшения скорости движением накатом. Если этап 202 определяет, что не должно быть никакого уменьшения скорости, например, так как допустимая скорость на дороге увеличивается на или сразу после спуска, который может, например, быть определен на основе данных, полученных с использованием функции LA/системы GPS, в этом случае по этой причине может быть предпочтительным позволять скорости транспортного средства максимально увеличиваться на спуске, способ переходит на этап 204, который определяет, должно ли вместо этого происходить движение накатом, когда транспортное средство достигает спуска, в этом случае способ переходит на этап 205, чтобы отсоединить двигатель от ведущих колес.
Однако согласно настоящему изобретению, этапы 202 и 204 определяют не только то, должен ли двигатель быть отсоединен от ведущих колес для того, чтобы двигаться накатом, но и должно ли транспортное средство двигаться накатом с выключенным двигателем. Согласно настоящему изобретению, таким образом транспортное средство может также эксплуатироваться без расхода топлива при движении накатом. Поэтому движение накатом с выключенным двигателем имеет и преимущества, в общем возникающие при движении накатом, по сравнению с движением с двигателем, оказывающим сопротивление, т.е. более низкое сопротивление движению, как указано выше, и в то же время преимущества, возникающие при движении с двигателем, оказывающим сопротивление, т.е. отсутствие расхода топлива, так как двигатель выключен.
Как упомянуто ранее, таким образом, этапы 202, 204 осуществляют определением того, должен ли двигатель быть выключен. Это выполняется определением того, может ли он быть отсоединен от ведущих колес на по меньшей мере первый период времени T1 до того, как силовая передача по какой-либо причине должна быть снова включена. Указанный первый период T1 может, например, быть установлен на определенное количество секунд, например, по меньшей мере 2, 3, 5 или 10 секунд. Выбранный период T1 может, например, быть таким, чтобы быть достаточно долгим для обеспечения того, чтобы силовая передача не была выключена и включена на слишком короткие промежутки времени, например, в отношении комфорта водителя или износа транспортного средства.
Согласно варианту выполнения, указанный первый период времени T1 определяется таким образом, что экономия топлива за счет выключения двигателя на период T1 по меньшей мере соответствует расходу топлива, требуемому при дальнейшем запуске двигателя посредством стартерного двигателя 115. Запуск стартерного двигателя будет расходовать некоторое количество топлива в несгоревшей форме до запуска двигателя. Это также потребует использование электрической энергии, которая далее должна подаваться обратно в аккумулятор, например, батарею, нагружая двигатель нагрузкой генератора. Определение времени, в течение которого двигатель может работать на соответствующем количестве топлива, а также, в варианте выполнения, преобразование электрической энергии, используемой для приведения в движение стартерного двигателя, для соответствующего количества топлива делает возможным определение того, может ли транспортное средство двигаться накатом достаточно долго с выключенным двигателем для выгодного выключения.
Время T1 также может быть временем, в течение которого двигатель может работать на соответствующем количестве топлива (а также любой электрической энергии, потребляемой как указано выше), а также подходящим смещением для компенсации дополнительного износа компонентов, вызываемого запуском/остановкой двигателя.
Определение времени T1, в течение которого двигатель может быть выключен, также может быть выполнено посредством вышеуказанной функции LA, т.е. на основе данных об уклонах маршрута впереди транспортного средства и/или на основе данных о дорожной топографии вдоль маршрута и/или местоположении транспортного средства.
Когда после этого будет определено, что двигатель может быть отсоединен от ведущих колес на по меньшей мере первый период времени, в связи с этим его таким образом отсоединяют на этапах 203/205 и выключают, например, на, по существу, тож е время, что и выключена силовая передача. Согласно варианту выполнения, сначала отключают подачу топлива в двигатель, в результате транспортное средство движется с двигателем, оказывающим сопротивление, еще до выключения силовой передачи, и в связи с этим двигатель останавливается.
После того как силовая передача транспортного средства выключается и двигатель выключается, способ переходит на этап 206 для определения того, должна ли силовая передача быть включена и/или двигатель быть запущен. Существуют различные возможные причины для включения силовой передачи и повторного запуска двигателя. Например, транспортное средство начинает тормозить раньше, чем заканчивается спуск. В зависимости от характера спуска транспортное средство может тормозить даже на спуске, и если его скорость падает до заданного минимума, который может, например, быть задан для комфорта водителя (который может быть нарушен, если уменьшение скорости может стать слишком большим) или по причинам затрат (если транспортное средство имеет возможность повторно отклоняться слишком сильно в сторону уменьшения от, например, заданной скорости, относящейся к активированной функции круиз-контроля или преобладающему ограничению скорости, это может отрицательно сказаться на общем времени пути транспортного средства с соответственными увеличенными расходами, выраженными в зарплате водителя и т.д.), силовая передача может быть включена, и двигатель может быть повторно запущен для ускорения транспортного средства обратно до требуемой скорости. Если вместо этого характер спуска такой, что транспортное средство было заторможено, но его текущая скорость превышает требуемую скорость, движение накатом может быть продолжено за пределы точки, где спуск заканчивается, пока транспортное средство не достигнет требуемой скорости.
Настоящее изобретение также может быть применено в сочетании со способами, описанными в заявках на патенты-аналоги, указанных выше, в этом случае выключение, как в настоящем изобретении, может быть применено во всех ситуациях движения накатом, в нем возникающих, при условии, что движение накатом может продолжаться в течение по меньшей мере первого периода времени T1, в этом случае движение накатом с выключенным двигателем прекращается на том же этапе, как в указанных заявках на патенты-аналоги.
Согласно другому примеру, двигатель транспортного средства может, например, быть повторно запущен, если водитель внезапно применяет тормоз, или если, например, система адаптивного круиз-контроля (которая может, например, использоваться для поддержания требуемого расстояния от транспортного средства впереди) обнаруживает препятствие на маршруте транспортного средства, в этом случае может быть необходимым повторный запуск двигателя для обеспечения того, чтобы все функции транспортного средства работали должным образом в моменты маневрирования, аварийного торможения или т.п.
Существуют также ситуации, когда может быть определено, что двигатель должен быть повторно запущен, несмотря на отсутствие неотъемлемой необходимости прекращения движения накатом. Если, например, тормозное давление в пневматической тормозной системе внезапно падает ниже минимального давления, двигатель может быть повторно запущен, чтобы делать возможным запуск компрессора для повышения давления в пневматической тормозной системе.
Если на этапе 206 определяют, что двигатель должен быть повторно запущен, например, по любой из причин, описанных выше, способ переходит на этап 207, чтобы повторно запустить его, и далее на этап 208, чтобы определить, должна ли силовая передача также быть включена. Если двигатель был повторно запущен из-за слишком низкого тормозного давления, еще может быть, что транспортное средство должно двигаться накатом в течение дополнительного периода времени, например, на остатке любого спуска, на котором оно все еще находится в это время. Также может быть, что на конце спуска транспортное средство все еще имеет скорость выше заданной скорости, в этом случае ему обычно предпочтительно позволяют двигаться накатом за пределы конца спуска, пока его скорость не упадет до, например, заданной скорости (также может быть, что оно имеет возможность сбросить скорость ниже заданной скорости). Когда после этого на этапе 208 определяют, что силовая передача должна быть включена, например, так как транспортное средство сбросило скорость до заданной скорости на некотором расстоянии после конца спуска, она включается на этапе 209, и способ возвращается на этап 201, рассматривающий, должно ли транспортное средство перемещаться по другому спуску или двигаться накатом снова в ходе спуска. Если двигатель повторно запущен, когда транспортное средство уже на спуске, способ 200 может быть повторен для определения того, может ли движение накатом с выключенным двигателем быть возобновлено на любом этапе во время оставшейся части спуска. Указанная заявка на патент-аналог "SYSTEM AND METHOD FOR RUNNING OF VEHICLES II" является примером ситуации, когда движение накатом может быть активировано более одного раза в ходе спуска, так что настоящее изобретение является применяемым в связи с этим.
Если этап 206 определяет, что силовая передача должны быть включена, например, для движения транспортного средства с двигателем, оказывающим сопротивление, способ переходит на этап 210, чтобы включить силовую передачу. Транспортные средства рассматриваемого здесь типа часто имеют верхний предел скорости VKFB, который не должен быть превышен, например, из-за правительственных постановлений или из-за того, что производитель транспортного средства утверждает максимальную скорость. Скорость VKFB также может быть задана водителем транспортного средства. Если эта скорость достигнута, транспортное средство обычно будет автоматически начинать использование дополнительных тормозных систем для обеспечения того, чтобы она не была превышена. По этой причине может, например, быть предпочтительным переключение на движение с двигателем, оказывающим сопротивление, в некоторых ситуациях, чтобы тем самым применять тормозной момент двигателя, который может уменьшать риск превышения VKFB. Далее способ переходит на этап 211 для определения того, должно ли быть возобновлено движение накатом. Если это не так, способ переходит на этап 212 для определения того, должен ли двигатель быть повторно запущен, например, так как транспортное средство прошло спуск, и увеличилось требование к мощности для приведения в движение. Далее двигатель повторно запускается на этапе 213, и способ возвращается на этап 201 для другого определения, как указано выше.
Если в конце спуска транспортное средство перемещается быстрее заданной скорости, оно может, как указано выше, предпочтительно двигаться накатом после конца спуска, пока транспортное средство не сбросит скорость до, например, заданной скорости. Если этап 211 определяет, что транспортное средство должно возобновить движение накатом, способ переходит на этап 214, чтобы снова отсоединить двигатель от ведущих колес, сопровождаемый возвращением на этап 206 для определения того, должна ли силовая передача быть включена, например, так как скорость транспортного средства после спуска уменьшилась до требуемой степени.
Выше был продемонстрирован запуск двигателя 101, осуществленный посредством стартерного двигателя 115. Количество остановок и вследствие этого запусков двигателя может заметно увеличиваться при эксплуатации транспортного средства согласно настоящему изобретению. По этой причине стартерный двигатель на транспортном средстве 100, где применяется настоящее изобретение, может быть заменен более мощным стартерным двигателем, чем обычно используемый на подобных транспортных средствах, не применяющих настоящее изобретение. Использование более мощного двигателя дает преимущество необходимости меньшего времени для ускорения двигателя до частоты вращения, при которой он может запускаться. Уменьшение времени, необходимого для запуска двигателя, делает возможным уменьшение также и количества несгоревшего топлива, возникающего при его запуске. Это также значит, что вышеуказанный период T1 может быть меньше, тогда как в то же время выключение двигателя остается выгодным.
Использование более мощного стартерного двигателя также дает преимущество в том, что он будет подвергаться меньшему износу, чем менее мощный двигатель, делая возможным уменьшение или компенсирование в полной мере вредных последствий эксплуатации транспортного средства согласно настоящему изобретению на срок службы стартерного двигателя и связанных компонентов.
В приведенном выше описании двигатель запускается посредством стартерного двигателя транспортного средства. Согласно варианту выполнения, вместо этого двигатель запускается путем соединения с ведущими колесами транспортного средства, т.е. путем включения силовой передачи, в этом случае подача топлива может начаться, когда ведущие колеса заставят двигатель вращаться достаточно быстро, чтобы быть в состоянии запуститься. Согласно варианту выполнения, двигатель ускоряется по меньшей мере до скорости холостого хода до подачи топлива для того, чтобы исключать недопустимые и внезапные изменения частоты вращения двигателя во время запуска (скорость, требуемая двигателю, чтобы иметь возможность запуститься, обычно по существу ниже скорости холостого хода). Согласно другому варианту выполнения, силовая передача полностью включена, заставляя двигатель работать при определенной частоте вращения, которая зависит от выбора передачи в коробке передач и от преобладающей скорости транспортного средства до того, как начнется подача топлива, т.е. транспортное средство переключается сначала на движение с двигателем, оказывающим сопротивление, в результате чего двигатель "запускается" путем подачи топлива.
Запуск двигателя путем включения силовой передачи дает преимущество в том, что запуск может быть осуществлен по существу без потерь, по меньшей мере, если силовая передача ускорила двигатель до по меньшей мере скорости холостого хода до подачи топлива, в этом случае подаваемое топливо будет сразу сгорать и, тем самым, производить тяговую мощность.
Согласно этому варианту выполнения, транспортное средство движется накатом при еще более низких затратах, чем при движении с двигателем, оказывающим сопротивление. Как указано выше, движение накатом также дает преимущество в том, что транспортное средство будет, как указано выше, достигать более высокой скорости или медленнее тормозиться, и будет в связи с этим эксплуатироваться при более высокой средней скорости, потенциально ведущей, так же, как указано выше, к положительным влияниям на затраты по зарплате водителя и т.д.
Запуск двигателя путем включения силовой передачи может предшествовать определению того, должно ли это происходить с наивысшей передачей (более низким передаточным отношением), зацепленной в коробке передач 103, или с зацепленной более низкой передачей. Это определение может быть основано на данных, полученных с использованием функции LA, как указано выше. Если, например, за спуском следует горизонтальный участок дороги, запуск может, например, быть осуществлен с зацепленной наивысшей передачей, тогда как если за спуском следует подъем, вместо этого может быть предпочтительным запуск двигателя с зацепленной более низкой передачей для исключения того, чтобы делать одно или более быстрых включений понижающей передачи сразу после того, как двигатель запущен.
Вариант выполнения настоящего изобретения включает выбор метода запуска двигателя, т.е. запуск после движения накатом без подачи топлива должен выполняться посредством стартерного двигателя или путем включения силовой передачи.
Это определение может, например, быть выполнено уже во время определения того, что транспортное средство должно двигаться накатом или когда движение накатом должно быть прекращено.
Это может, например, быть предпочтительным по причинам комфорта, чтобы запускать двигатель посредством стартерного двигателя, если некоторое количество этапов включения понижающей передачи будет требоваться сразу после того, как движение накатом заканчивается, например, так как за спуском следует подъем. Если двигатель запущен посредством стартерного двигателя, включения понижающей передачи для требуемых передач могут происходить требуемым образом, например, понижая передачу сразу до требуемой передачи до того, как силовая передача будет включена, или в требуемой последовательности управляемым образом. Если вместо этого транспортное средство запущено путем включения силовой передачи, могут возникать недопустимые рывки, если, например, двигатель должен быть запущен при относительно низкой передаче, так как за спуском следует крутой подъем.
Согласно настоящему изобретению, таким образом, способы запуска двигателя могут быть выбраны на основе данных о маршруте впереди транспортного средства.
Как обозначено выше, когда транспортное средство находится в движении, имеются функции, которые необходимы для обеспечения его безопасной эксплуатации, и эти функции могут находиться в зависимости от двигателя. Примером является пневматическая тормозная система, которая указана выше, функция которой может поддерживаться в течение по меньшей мере некоторого времени после того, как двигатель был выключен.
Однако имеются также функции, которые могут непосредственно зависеть от вращения выходного вала двигателя, например традиционная функция усиления рулевого управления. Если двигатель выключен, функция усиления рулевого управления будет также выключена в случаях, когда она приводится в действие выходным валом двигателя, делая движения рулевым колесом более обременительными для водителя. Согласно варианту выполнения, в связи с этим способ согласно изобретению применим только в условиях, когда маршрут впереди транспортного средства относительно прямой, ограничивающий необходимость в больших движениях рулевым колесом.
Другой вариант выполнения настоящего изобретения использует вместо этого функцию усиления рулевого управления, которая независима от вращения выходного вала двигателя. Это может, например, быть достигнуто посредством насоса усилителя руля с электрическим приводом, В этом случае функция усиления может поддерживаться даже тогда, когда двигатель выключен.
Вариант выполнения использует совокупность традиционного насоса усилителя руля, приводимого в действие двигателем при работе, и электрического насоса усилителя руля, используемого при движении накатом с выключенным двигателем. Также могут быть и другие функции и/или вспомогательные системы, которые обычно приводятся в действие двигателем, но для которых электрическое решение может быть предпочтительным по меньшей мере, когда двигатель выключен.
Настоящее изобретение не ограничивается вариантами выполнения изобретения, описанными выше, но относится к и содержит все варианты выполнения в пределах объема охраны приложенных независимых пунктов формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2568151C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2564066C2 |
| СПОСОБ И СИСТЕМА ВОЖДЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2514610C2 |
| СПОСОБ ЗАПУСКА И ОСТАНОВКИ ДВИГАТЕЛЯ И СИСТЕМА ДВИГАТЕЛЯ | 2012 |
|
RU2606523C2 |
| ЭКОНОМИЧНАЯ СИСТЕМА КРУИЗ-КОНТРОЛЯ | 2013 |
|
RU2637564C2 |
| УПРАВЛЕНИЕ СИЛОВЫМ АГРЕГАТОМ НА ОСНОВАНИИ СНИЖЕНИЯ ЭФФЕКТИВНОСТИ ТОРМОЖЕНИЯ И ТОРМОЗНОЙ СПОСОБНОСТИ | 2017 |
|
RU2688567C2 |
| СИСТЕМА КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ЕЕ РАБОТЫ | 2015 |
|
RU2678416C2 |
| СПОСОБ И СИСТЕМА (ВАРИАНТЫ) КРУИЗ-КОНТРОЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2719122C2 |
| РЕГУЛИРОВКА КРУТЯЩЕГО МОМЕНТА СИЛОВОЙ ПЕРЕДАЧИ ТРАНСПОРТНОГО СРЕДСТВА НА ОСНОВАНИИ ПРОИЗВОДНОЙ ПО ВРЕМЕНИ ДИНАМИЧЕСКОГО КРУТЯЩЕГО МОМЕНТА | 2015 |
|
RU2679600C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2011 |
|
RU2561658C1 |

Изобретение относится к эксплуатации транспортного средства. Способ эксплуатации транспортного средства, в котором транспортное средство содержит двигатель внутреннего сгорания, выборочно соединенный с одним карданным валом, причем способ содержит этапы, на которых, когда транспортное средство приближается к спуску, определяют, может ли двигатель быть отсоединен от по меньшей мере одного карданного вала, и в случае удовлетворения данного условия отсоединяют двигатель от по меньшей мере одного карданного вала на первый период. Двигатель также выключают во время первого периода. Первый период времени представляет собой период, в течение которого транспортное средство находится на спуске. Система эксплуатации транспортного средства содержит средство определения и средство отсоединения в соответствии с вышеуказанным способом. Транспортное средство дополнительно обеспечено стартерным двигателем, который является более мощным, чем обычно используемый в подобных транспортных средствах. Снижается расход топлива. 3 н. и 13 з.п. ф-лы, 2 ил.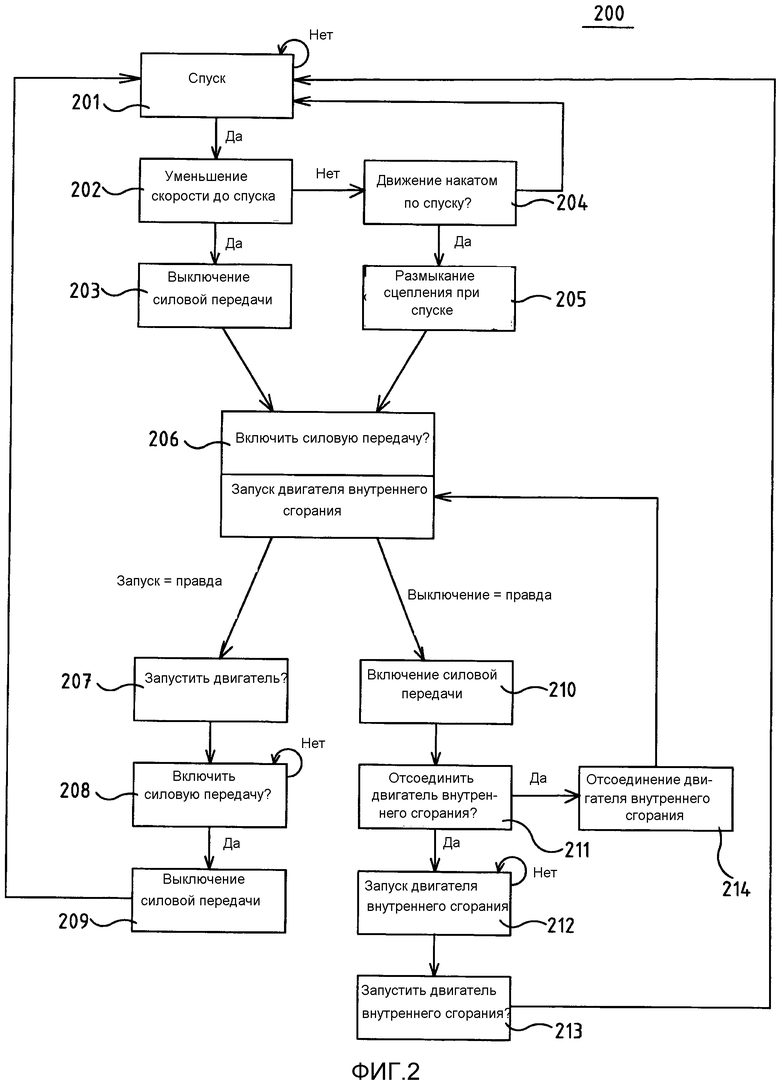
1. Способ эксплуатации транспортного средства (100), в котором транспортное средство (100) содержит двигатель (101) внутреннего сгорания, который может быть выборочно соединен с по меньшей мере одним карданным валом (104, 105) для обеспечения движущей силой карданного вала (104, 105) для приведения в движение транспортного средства (100), отличающийся тем, что когда транспортное средство (100) находится в движении, способ содержит этапы, на которых:
когда транспортное средство (100) приближается к спуску, определяют, может ли двигатель (101) быть отсоединен от по меньшей мере одного карданного вала (104, 105) на по меньшей мере первый период времени (Т1), и
когда двигатель (101) может быть отсоединен от по меньшей мере одного карданного вала (104, 105) на по меньшей мере первый период времени (Т1), отсоединяют двигатель (101) от по меньшей мере одного карданного вала (104, 105) на первый период (Т1), причем двигатель (101) также выключают во время первого периода (Т1), при этом
первый период времени (Т1) представляет собой период, в течение которого транспортное средство (100) находится на спуске.
2. Способ по п. 1, в котором уменьшение расхода топлива для транспортного средства (100), когда двигатель (101) выключен на первый период времени (Т1), по меньшей мере соответствует расходу топлива, требуемому, когда двигатель (101) запускается посредством стартерного двигателя.
3. Способ по п. 2, в котором уменьшение расхода топлива во время периода времени (Т1) также содержит электрическую энергию, используемую для запуска стартерного двигателя, и/или первое количество топлива для компенсации износа компонентов, вызываемого запуском и остановкой двигателя при отсоединении от по меньшей мере одного карданного вала (104, 105).
4. Способ по любому из пп. 1-3, дополнительно содержащий этап, на котором
определяют, может ли двигатель (101) быть отсоединен от по меньшей мере одного карданного вала (104, 105) на по меньшей мере первый период времени (Т1) на основе данных о предстоящем маршруте транспортного средства и уклонах маршрута и/или на основе данных о дорожной топографии предстоящего маршрута транспортного средства (100) и/или местоположении транспортного средства.
5. Способ по любому из пп. 1-3, в котором функцию круиз-контроля для транспортного средства (100) активируют при определении того, может ли двигатель (101) быть отсоединен от по меньшей мере одного карданного вала (104, 105) на первый период времени (Т1).
6. Способ по любому из пп. 1-3, дополнительно содержащий этап, на котором, когда двигатель (101) повторно запускают после выключения во время движения накатом, запускают двигатель (101) путем его соединения с карданным валом (104, 105).
7. Способ по любому из пп. 1-3, в котором после выключения во время движения накатом двигатель (101) запускают посредством стартерного двигателя или путем соединения с карданным валом (104, 105), дополнительно содержащий этап, на котором
выбирают способы запуска двигателя (101) на основе данных о предстоящем маршруте транспортного средства.
8. Способ по п. 6, в котором транспортное средство дополнительно содержит коробку передач (103), которая может быть установлена в первое количество постоянных передаточных отношений, дополнительно содержащий этап, на котором
когда двигатель подлежит соединению с карданным валом (104, 105), определяют, какое из постоянных передаточных отношений подлежит установке в коробке передач (103) на основе данных о предстоящем маршруте транспортного средства.
9. Способ по п. 7, в котором транспортное средство содержит коробку передач (103), которая может быть установлена в первое количество постоянных передаточных отношений, дополнительно содержащий этап, на котором
когда двигатель подлежит соединению с карданным валом (104, 105), определяют, какое из постоянных передаточных отношений подлежит установке в коробке передач (103) на основе данных о предстоящем маршруте транспортного средства.
10. Способ по любому из пп. 1-3 или 8-9, дополнительно содержащий этап, на котором
определяют, может ли двигатель быть отсоединен от по меньшей мере одного карданного вала на по меньшей мере первый период времени посредством по меньшей мере одного блока (110) управления, расположенного в системе управления транспортного средства.
11. Способ по любому из пп. 1-3 или 8-9, в котором первый период времени (Т1) составляет по меньшей мере две секунды.
12. Система эксплуатации транспортного средства (100), в которой транспортное средство (100) содержит двигатель (101) внутреннего сгорания, который может быть выборочно соединен с по меньшей мере одним карданным валом (104, 105) для обеспечения движущей силой карданного вала (104, 105) для приведения в движение транспортного средства (100), отличающаяся тем, что содержит:
средство определения, когда транспортное средство (100) находится в движении и приближается к спуску, может ли двигатель (101) быть отсоединен от по меньшей мере одного карданного вала (104, 105) на по меньшей мере первый период времени (Т1), и
средство отсоединения, когда двигатель (101) может быть отсоединен от по меньшей мере одного карданного вала (104, 105) на по меньшей мере первый период времени (Т1), двигателя (101) от по меньшей мере одного карданного вала (104, 105) на первый период (Т1), причем двигатель (101) также выключается на первый период (Т1), при этом
первый период времени (Т1) представляет собой период, в течение которого транспортное средство (100) находится на спуске.
13. Система по п. 12, отличающаяся тем, что содержит средство отсоединения двигателя от карданного вала путем размыкания сцепления и/или установки коробки передач в нейтральное состояние.
14. Транспортное средство, отличающееся тем, что обеспечено системой по любому из пп. 12 или 13.
15. Транспортное средство по п. 14, отличающееся тем, что дополнительно обеспечено усилителем рулевого управления, функция которого является, по существу, независимой от вращения выходного вала двигателя.
16. Транспортное средство по п. 14 или 15, отличающееся тем, что дополнительно обеспечено стартерным двигателем, который является более мощным, чем обычно используемый в подобных транспортных средствах.
| ЦЕНТРОБЕЖНЫЙ КОНЦЕНТРАТОР | 2010 |
|
RU2452579C2 |
| EP 1923291 A2, 21.05.2008 | |||
| DE 102009046340 A1, 05.05.2011 | |||
| WO 2008130288 A1, 30.10.2008. | |||

