Область техники.
Изобретение относится к радиолокации, в частности к радиолокационным станциям кругового обзора для обнаружения и определения местоположения движущихся целей в ультракоротковолновом диапазоне электромагнитных волн, и может быть использовано в системах управления воздушным движением (УВД).
Уровень техники.
Известны радиолокационные станции (РЛС) кругового обзора /US 9620866, RU 2624736, CN 104200112/, основанные на одновременном и всенаправленном (в азимутальной плоскости) обзоре воздушного пространства.
Наиболее близкой по назначению и технической сущности к заявляемому изобретению относится радиолокационная станция (РЛС) кругового обзора /патент RU 2624736/, предназначенная для резонансного обнаружения летательных аппаратов (ЛА) и содержащая передающее антенно-фидерное устройство (ПРД АФУ) и приемное антенно-фидерное устройство (ПРМ АФУ) метрового диапазона электромагнитных волн, выполненные с независимым электронным сканированием воздушного пространства на передачу и прием. ПРД АФУ соединен высокочастотным коаксиальным кабелем по усиленным зондирующим сигналам с устройством усиления мощности (УУМ) зондирующих сигналов (ЗС). ПРМ АФУ по отраженным сигналам и сигналам радиопомех соединен высокочастотным коаксиальным кабелем с многоканальным приемным устройством (МПУ), установленным в аппаратной кабине радиолокационной станции (РЛС).
Причем ПРД АФУ и ПРМ АФУ выполнены секторными и установлены парами вдоль четырех сторон правильного четырехугольника площадью (100×100) м2.
ПРД АФУ 2 представляет собой излучающую антенную решетку с вертикальным раскрывом антенного полотна, выполненную с возможностью одновременного зондирования пространства веером лопатообразных радиолучей в секторе не менее 90° в азимутальной плоскости и в секторе 1,5-80° в угломестной плоскости. Излучающая антенная решетка содержит блоки логопериодических вибраторных антенн (ЛПВА), смонтированных вертикально на внешней боковой стороне мачты. Каждый блок ЛПВА содержит две крестообразно установленные ЛПВА, запитываемые от соответствующих каналов многоканального генератора высокочастотных зондирующих сигналов (ЗС).
ПРМ АФУ выполнена с азимутальным раскрывом антенного полотна из крестовидных антенных элементов (АЭ), размещенных горизонтальными рядами на установленных в одну линию мачтах, причем каждый крестовидный АЭ представляет собой два диполя Надененко, расположенные перпендикулярно относительно друг друга и под углом 45° к горизонтальной плоскости.
Аппаратная кабина содержит соединенные между собой интерфейсной линией связи блок секторных многоканальных радиоприемников для приема резонансных сигналов ВО и помех от соответствующих приемных секторных антенн, блок устройств цифровой обработки сигналов (ЦОС) и измерения координат ВО, блок подготовки радиолокационных данных для внешних пользователей радиолокационной информации (РЛИ), блок формирования запросов и обработки сигналов «свой-чужой», стационарное автоматизированное рабочее место (АРМ) и выносное АРМ оператора.
Недостатком известной РЛС (патент RU 2624736) является повышенная заметность и уязвимость от средств воздушного нападения, связанная с увеличенными размерами антенной системы РЛС из-за увеличенной длины волны, используемой для резонансного обнаружения воздушных целей.
Снижение заметности и уязвимости известной РЛС путем уменьшения габаритов ее антенной системы приводит к ухудшению разрешающей способности РЛС по дальности и азимуту.
Желательно уменьшить заметность и уязвимость РЛС метрового диапазона ЭМВ без снижения ее разрешающей способности по дальности и азимуту для резонансного обнаружения ЛА.
Задачей и техническим результатом изобретения является уменьшение массогабаритных характеристик антенной системы без снижения разрешающей способности РЛС по дальности и азимуту для обнаружения ЛА.
Сущность изобретения
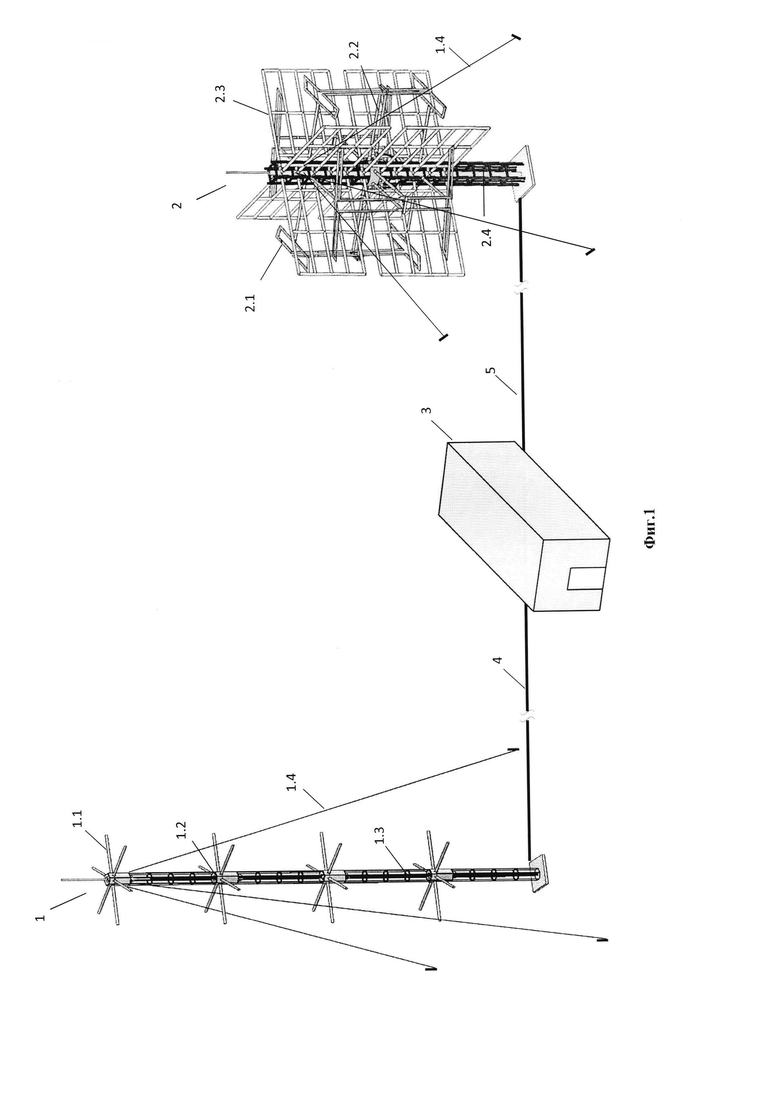
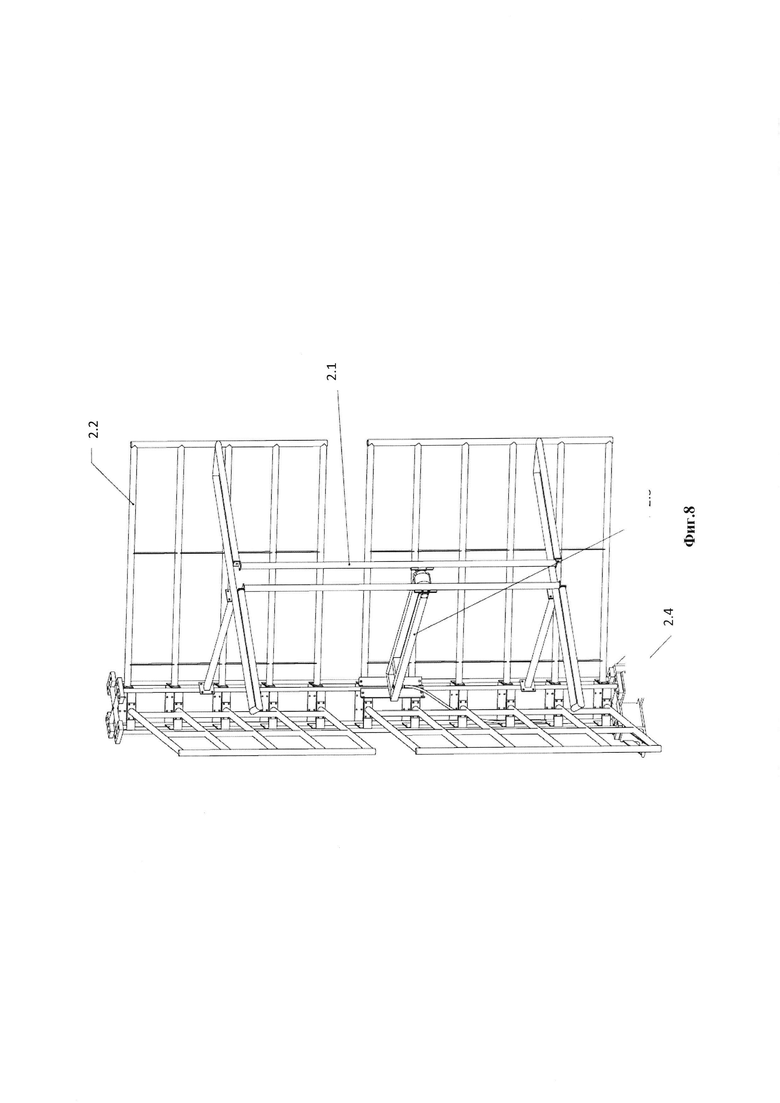
Достижение заявленного технического результата и решение поставленной задачи обеспечивается тем, что РЛС кругового обзора содержит передающее антенно-фидерное устройство (ПРД АФУ) 2 и приемное антенно-фидерное устройство (ПРМ АФУ) 1 метрового диапазона электромагнитных волн, выполненные с независимым электронным сканированием воздушного пространства на передачу и прием. ПРД АФУ 2 соединен высокочастотным коаксиальным кабелем 5 по усиленным зондирующим сигналам с устройством усиления мощности (УУМ) 6 зондирующих сигналов (ЗС). ПРМ АФУ по отраженным сигналам и сигналам радиопомех соединен высокочастотным коаксиальным кабелем 4 с многоканальным приемным устройством (МПУ) 7, установленным в аппаратной кабине 3 радиолокационной станции (РЛС). Согласно изобретению ПРД АФУ 2 содержит плоские рефлекторы 2.3, установленные вертикально вокруг оси стационарной невращающейся мачте 2.4. Между смежными плоскостями рефлекторов 2.3 установлены двух ярусные петлевые вибраторы 2.1 горизонтальной поляризации с центральной запиткой через распределительный фидер 2.2. ПРМ АФУ 1 содержит четыре идентичных яруса скрещенных между собой в горизонтальной плоскости трех полуволновых вибраторов 1.1 горизонтальной поляризации, размещенных на стационарной вертикальной невращающейся мачте 1.3. Несущие мачты 2.4 и 1.3 ПРД АФУ 2 и ПРМ АФУ 1 разнесены на местности на расстояние d, достаточное для обеспечения защиты приемника от воздействия прямого излучения передатчика.
Такое выполнение ПРД АФУ 2 и ПРМ АФУ 1 позволяет применить метод фазового измерения азимута воздушных объектов (ВО) без использования четырех громоздких азимутальных приемных антенн с площадью раскрыва более 400 м2 каждая и без ухудшения разрешающей способности РЛС для резонансного обнаружения ВО.
Указанные технические преимущества предложенной РЛС позволяют существенно снизить габариты антенных систем, уменьшить заметность и уязвимость РЛС от средств нападения воздушного противника и, тем самым, достичь заявленного технического результата и решение поставленной задачи.
Ссылка на чертежи
Сущность изобретения поясняется чертежами, представленными на фиг. 1…9.
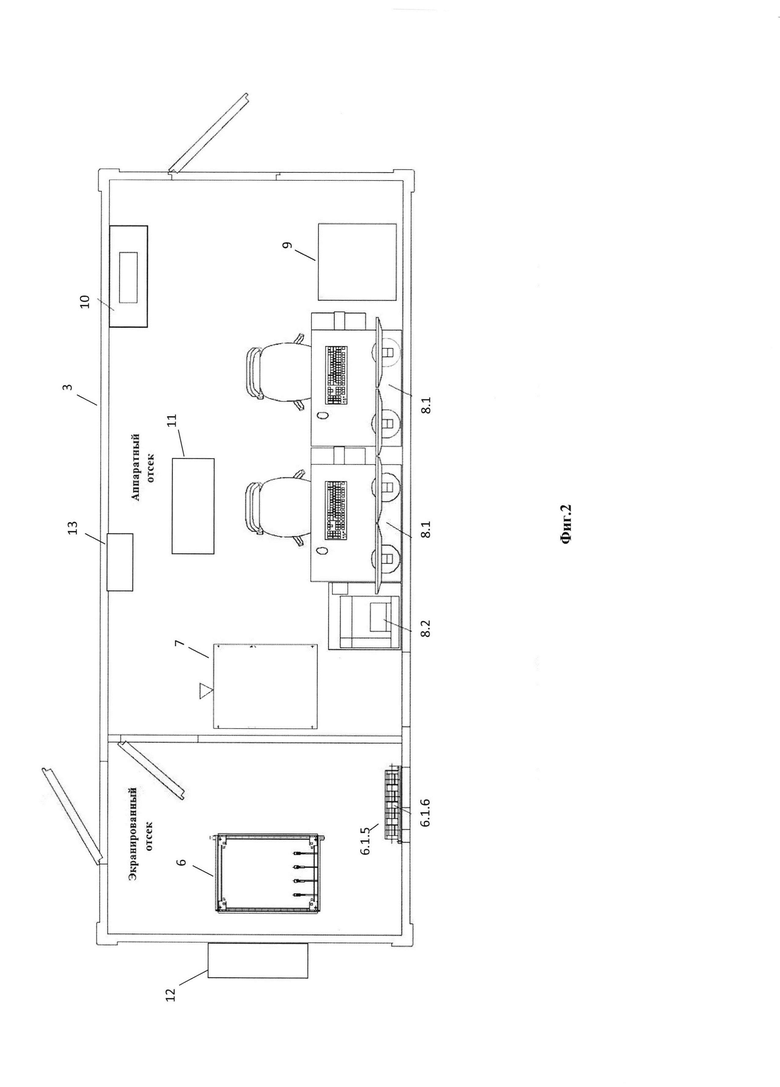
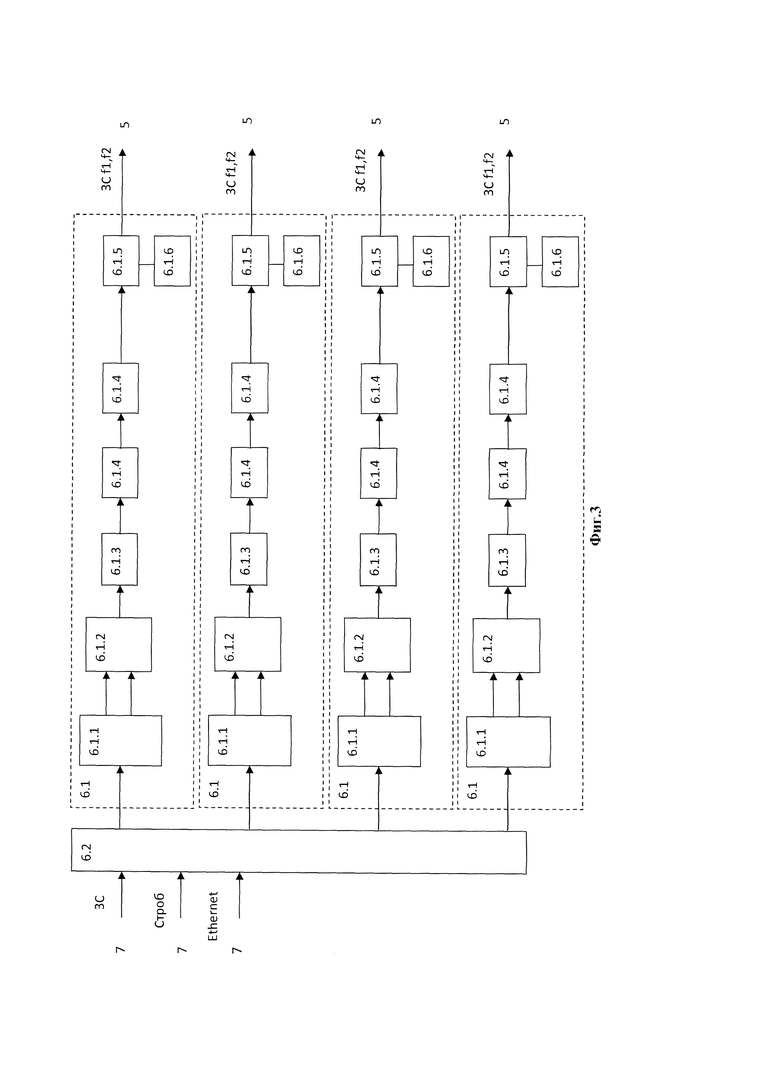
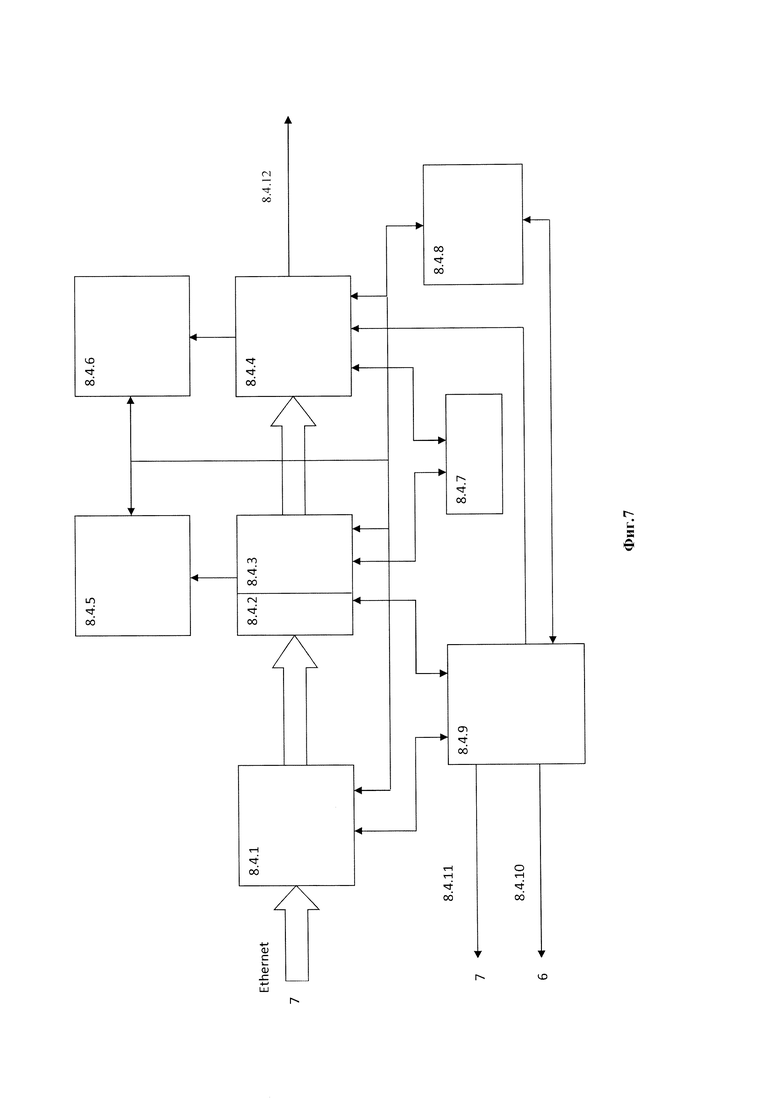
На фиг. 1 представлен пример внешнего вида радиолокационной станции кругового обзора (РЛС КО) со стационарной антенной системой (САС) метрового диапазона (МД) электромагнитных волн (ЭМВ); на фиг. 2 - схема размещения технологической аппаратуры в аппаратном контейнере; на фиг. 3 - структурная схема устройства усиления мощности; на фиг. 4 - структурная схема приемного канала; на фиг. 5 - схема размещения РЛС в плане; на фиг. 6 - функциональная схема РЛС; на фиг. 7 - структура специального программного обеспечения, фиг. 8 - конструкция одного модуля передающего антенно-фидерного устройства (АФУ); на фиг. 9 - временная диаграмма работы РЛС.
На фиг. 1…9 обозначены:
1 - приемное антенно-фидерное устройство (ПРМ АФУ);
1.1 - полуволновый вибратор (ПВВ);
1.2 - блок суммирования и согласования (БСС);
1.3 - четырех секционная приемная мачта (СМ1);
1.4 - растяжки (Р);
2 - передающее антенно-фидерное устройство (ПРД АФУ);
2.1 - петлевой вибратор (ПЕВ);
2.2 - фидер распределительный (ФР);
2.3 - рефлектор (РЕФ);
2.4 - двух секционная передающая мачта (СМ2);
3 - аппаратный контейнер (АК);
4 - коаксиальные кабели (КК) для передачи принятых сигналов (ПС);
5 - КК для передачи зондирующих сигналов (ЗС);
6 - устройство усиления мощности (УУМ);
6.1 - канал усиления мощности (КУМ);
6.1.1 - блок контроля и регулирования (БКР);
6.1.2 - блок усиления мощности (БУМ);
6.1.3 - блок фильтра гармоник (БФГ);
6.1.4 - блок направленных ответвителей (БНО);
6.1.5 - блок антенного переключателя (БАП);
6.1.6 - блок эквивалента нагрузки (БЭН);
6.2 - блока управления и контроля (БУК);
7 - многоканальный приемное устройство (МПУ);
7.1 - приемный канал (ПК);
7.1.1 - ограничитель (ОГР);
7.1.2 - ключ (КЛ);
7.1.3 - преселектор (ПРЕ);
7.1.4 - усилитель высокой частоты (УВЧ);
7.1.5 - аттенюатор (АТТ);
7.1.6 - аналого-цифровой преобразователь (АЦП);
7.1.7 - цифровой фильтр (ЦФ);
7.1.8 - сигнальный процессор (СП);
7.1.9 - программируемая логическая интегральная схема управления (ПЛИС);
7.1.10 - шина выходной сигнальной информации;
7.1.11 - шина управления обработкой отраженных сигналов (ОС);
7.2 - блок управления обработкой ОС, обмена данными и формирования (БУОФ) стробов (СТ) и зондирующих сигналов (ЗС);
7.3 - приемник космической навигационной системы (ПКНС);
7.4 - блок синхронизации (БСХ);
7.5 - разветвитель опорной частоты (РОЧ);
8 - вычислительный комплекс (ВК);
8.1 - автоматизированное рабочее место (АРМ);
8.2 - ЭВМ приема и обработки (ЭВМ ПО);
8.3 - общее аппаратно-программное обеспечение (ОПО);
8.4 - специальное аппаратно-программное обеспечение (СПО);
8.4.1 - блок программ (БП) приема и регистрации входного потока информации (ПРВПИ);
8.4.2 - БП первичной когерентной обработки сигналов (ПКО);
8.4.3 - БП первичной некогерентной обработки сигналов (ПНО);
8.4.4 - БП траекторной обработки информации (ТО);
8.4.5 - БП отображения первичной информации (ОПИ);
8.4.6 - БП отображения траекторной информации (ОТИ);
8.4.7 - БП регистрации и воспроизведения информации (РВИ);
8.4.8 - БП функционального контроля (ФК);
8.4.9 - БП управления работой РЛС (УРР);
8.4.10 - шина управления ВК 6;
8.4.11 - шина управления МПУ 7;
8.4.12 - шина подключения системы передачи данных (СПД) внешним потребителям радиолокационной информации
9 - шкаф запасных частей и измерительных приборов (ЗИП);
10 - шкаф электропитания (ЭЛП);
11 - кондиционер (КДЦ);
12 - фильтровентиляционная установка;
13 - блок терморегулирования (ТР).
Описание конструкции РЛС кругового обзора в статике
РЛС кругового обзора содержит передающее антенно-фидерное устройство (ПРД АФУ) 2 и приемное антенно-фидерное устройство (ПРМ АФУ) 1 метрового диапазона электромагнитных волн, выполненные с независимым электронным сканированием воздушного пространства на передачу и прием. ПРД АФУ 2 соединен высокочастотным коаксиальным кабелем 5 по усиленным зондирующим сигналам с устройством 6 усиления мощности (УУМ) зондирующих сигналов (ЗС). ПРМ АФУ по отраженным сигналам и сигналам радиопомех соединен высокочастотным коаксиальным кабелем 4 с многоканальным приемным устройством (МПУ) 7, установленным в аппаратной кабине 3 радиолокационной станции (РЛС). ПРД АФУ 2 содержит плоские рефлекторы 2.3, установленные вертикально вокруг оси стационарной невращающейся передающей мачты 2.4. Между смежными плоскостями рефлекторов 2.3 установлены двух ярусные петлевые вибраторы 2.1 горизонтальной поляризации с центральной запиткой через распределительный фидер 2.2. ПРМ АФУ 1 содержит четыре идентичных яруса скрещенных между собой в горизонтальной плоскости трех полуволновых вибраторов 1.1 горизонтальной поляризации, размещенных на стационарной вертикальной невращающейся мачте 1.3. Несущие мачты 2.4, 1.3 ПРД АФУ 2 и ПРМ АФУ 1 разнесены на местности на расстояние d, достаточное для обеспечения защиты приемника 7 от воздействия прямого излучения передатчика 6.
Конкретное значение величины d выбрано из условия U (P, L, d)≤Ud, где: Р - средняя мощность излучения; d - расстояние между мачтами; L - действующий размер приемной антенны; U - напряжение, создаваемое на входе приемника за счет воздействия прямого излучения передатчика; Ud - максимально допустимое напряжение на входе приемника.
Для предлагаемой РЛС кругового обзора с параметрами Р и Ud, аналогичными прототипу /RU 2624736/, численное значение величины d может составлять d≥50 м.
Аппаратная кабина 3 РЛС выполнена в виде двухсекционного кузова-контейнера с фильтровентиляционной установкой (ФВУ) 12, установленной на внешней поверхности его кузова. В экранированном отсеке кузова-контейнера размещены шкаф устройства усиления мощности (УУМ) 6, блок антенных переключателей (БАП) 6.1.5 и блок эквивалента нагрузки (БЭН) 6.1.6. В аппаратном отсеке контейнера 3 установлены шкаф многоканального приемного устройства (МПУ) 7, вычислительный комплекс (ВК) приема и обработки цифровых сигналов 8, шкаф электропитания (ЭЛП) 10, шкаф для запасных частей и измерительных приборов (ЗИП) 9, кондиционер 11 и блок терморегулирования 13. Указанная аппаратура аппаратного и экранированного отсеков кабины 3 соединена с вычислительным комплексом (ВК) 6 интерфейсными линиями связи.
Устройство усиления мощности (УУМ) 6 зондирующих сигналов (ЗС) кабины 3 содержит блок управления и контроля (БУК) 6.2, соединенный по выходу с четырьмя идентичными каналами усиления мощности (КУМ) 6.1. Каждый КУМ 6.1 выполнен с возможностью усиления двух зондирующих сигналов (ЗС) короткой τ1 и увеличенной τ2 длительности на частотах f1 и f2 до номинальной мощности P1 и Р2 соответственно. КУМ 6.1 содержит последовательно соединенные блок контроля и регулирования (БКР) 6.1.1, усиления мощности (БУМ) блок 6.1.2, блок фильтров гармоник (БФГ) 6.1.3 и блок направленных ответвителей (БНО) 6.1.4. БНО 6.1.4 соединен через блок 6.1.5 антенных переключателей (БАП) с высокочастотным разъемом подключения коаксиального кабеля (КК) 5 для передачи зондирующих сигналов (ЗС) на ПРД АФУ 2 и блоком эквивалента нагрузки (БЭН) 6.1.6.
Многоканальное приемное устройство прямого усиления (МПУ) 7 кабины 3 предназначено для приема, усиления высокочастотных (ВЧ) ответных сигналов (ОС), преобразования их в цифровую форму, цифровой фильтрации и выдачи результатов цифровой фильтрации в вычислительный комплекс (ВК) 8 для первичной и вторичной обработки ОС, а также для выработки в цифровой форме зондирующих сигналов (ЗС), стробов (СТ) закрытия приемных трактов на время излучения ЗС и выработки сигналов синхронизации (СИ) сигналов управления (СУ) приемом и обработкой ответных сигналов (ОС), а также имитационных сигналов (ИС) в режиме функционального контроля (ФК) РЛС.
Согласно фиг. 6 МПУ 7 содержит блок приемных каналов (ПК) 7.1, блок управления, обмена и формирования зондирующих (ЗС) и имитационных (ИС) сигналов (БУОФ) 7.2, приемник космической навигационной системы (ПКНС) 7.3, блок синхронизации (БСХ) 7.4 и разветвитель опорной частоты (РОЧ) 7.5.
При этом выходы блока БУОФ 7.2 по ЗС и СТ соединены с блоком управления и контроля (БУК) 6.2 устройства усиления мощности (УУМ) 6. Выходы блока 7.2 по сигналам СУ соединены непосредственно с первыми управляющими входами приемных каналов 7.1, а по сигналам СИ - с приемником космической навигационной системы (ПКНС) 7.3, блок синхронизации (БСХ) 7.4 и разветвитель опорной частоты (РОЧ) 7.5 - с вторыми управляющими входами приемных каналов 7.1.
Количество Nпк приемных каналов 7.1 выбрано из условия Nпк=Nя * Nв, где Nя - количество ярусов мачты 1.3 ПРМ АФУ 1 и количество Nв приемных вибраторов 1.1, установленных на каждом ярусе для кругового обзора воздушного пространства.
Каждый приемный канал 7.1 выполнен с возможностью приема, усиления на высокой частоте, аналого-цифрового преобразования, цифровой фильтрации отраженных сигналов (ОС) и радиопомех, поступающих с вибраторов 1.1 приемного ПРМ АФУ 1. Для этого каждый приемный канал (ПК) 7.1 содержит (фиг. 4) последовательно соединенные по обработке ответных сигналов (ОС) ограничитель (ОГР) 7.1.1, ключ (КЛ) 7.1.2, преселектор (ПРЕ) 7.1.3, усилитель высокой частоты (УВЧ) 7.1.4, аттенюатор (АТТ) 7.1.5, аналого-цифровой преобразователь (АЦП) 7.1.6, цифровой фильтр (ЦФ) 7.1.7, сигнальный процессор (СП) 7.1.8 и шину 7.1.10 выходной сигнальной информации. Для управления обработкой ОС каждый приемный канал (ПК) 7.1 дополнительно содержит программируемую логическую интегральную схему управления (ПЛИС) 7.1.9. ПЛИС 7.1.9 соединена по управляющему входу с шиной 7.1.11 подключения блока 7.2, а по управляющим выходам с управляющими входами ключа (КЛ) 7.1.2, преселектора (ПРЕ) 7.1.3, цифрового фильтра (ЦФ) 7.1.7 и сигнального процессора (СП) 7.1.8. В свою очередь СП 7.1.8 по опорной частоте и частоте повторения ЗС через шину 7.1.11 соединен с БУОФ 7.2. Шина 7.1.10 выходной сигнальной информации каждого ПК 7.1 соединена с вычислительным комплексом (ВК) 8 кабины 3.
Вычислительный комплекс (ВК) 8 выполнен с возможностью цифрового формирования диаграмм направленности (ЦФДН), первичной и траекторной обработки радиолокационной информации, формирования выходной информации. ВК 8 содержит соединенные интерфейсными линиями связи два автоматизированных рабочих места (АРМ) 8.1, электронно-вычислительную машину (ЭВМ) приема и обработки сигналов 8.2, а также блоки памяти с общим (ОПО) 8.3 и специальным программным обеспечением (СПО) 8.4. Общее ОПО 8.3 представляет собой операционную систему Astra Lunix Edition. СПО 8.4 включает последовательно соединенные по обработке цифровых данных блоки программ (БП) приема и регистрации входного потока информации (ПРВПИ) 8.4.1, БП первичной когерентной обработки сигналов (ПКО) 8.4.2, БП первичной некогерентной обработки сигналов (ПНО) 8.4.3 и КП траекторной обработки (ТО) информации 8.4.4. БП 8.4.4 соединен по выходу с шиной подключения системы передачи данных (СПД) внешним потребителям радиолокационной информации 8.4.12 и с БП отображения траекторной информации (ОТИ) 8.4.6. Второй вход/выход БП 8.4.6 соединен с первыми входами/выходами БП отображения первичной информации (ОПИ) 8.4.5, КП ПРВПИ 8.4.1, БП ПНО 8.4.3, БП ТО 8.4.4 и БП функционального контроля (ФК) 8.4.8. Второй вход/выход БП 8.4.8 по информации ФК соединен через БП управления работой РЛС (УРР) 8.4.9 с шиной 8.4.10 управления УУМ 6, шиной 8.4.11 управления МПУ 7, а также с вторыми входами/выходами БП ПРВПИ 8.4.1, БП ПКО 8.4.2, КП ТО 8.4.4. Третий вход/выход БП 8.4.4 через БП 8.4.7 соединен со вторым входом/выходом БП регистрации и воспроизведения информации (РВИ) 8.4.7.
Описание конструкции РЛС кругового обзора в динамике
Радиолокационная станция (РЛС) кругового обзора работает следующим образом.
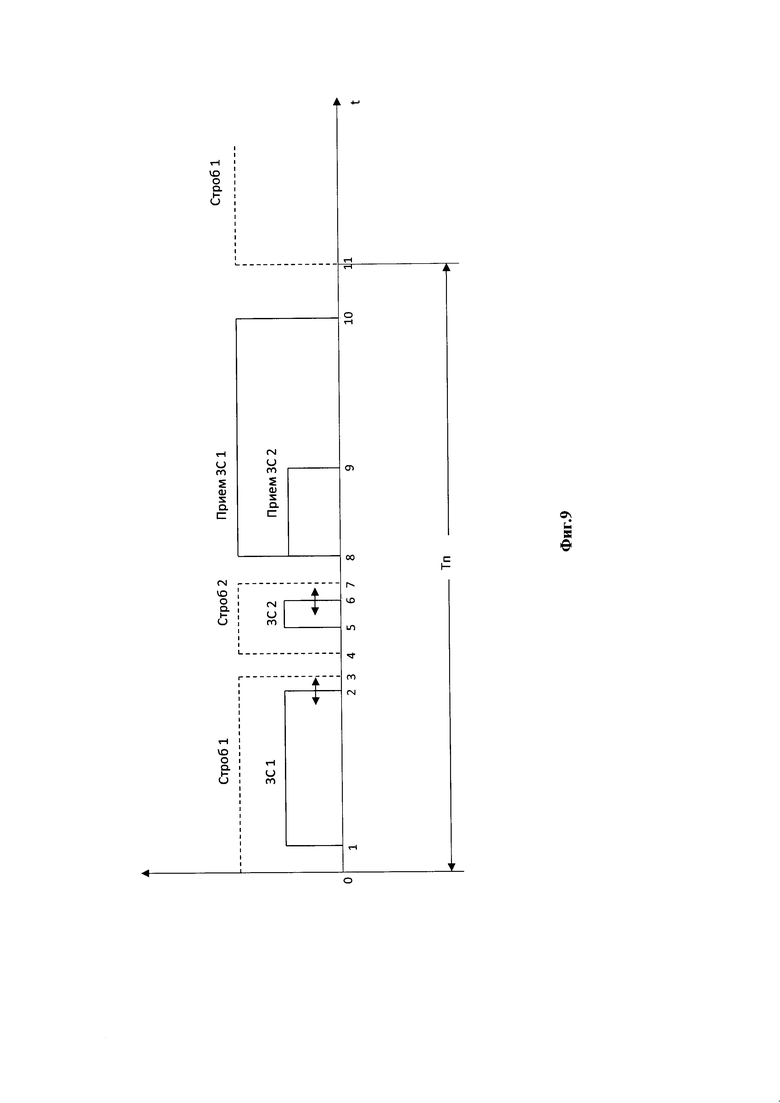
В БУОФ 7.2, находящимся в МПУ 7, формируются в цифровом виде два ЗС различной длительности (фиг. 9) на двух заданных оператором частотах: один ЗС - короткий, с амплитудной модуляцией (АМ) или с линейно-частотной модуляцией (ЛЧМ), второй ЗС - длинный, с ЛЧМ, и оба ЗС передаются на УУМ 6, состоящее из четырех КУМ 6.1, в которых маломощные короткий и длинный ЗС усиливаются до номинальной мощности.
Усиленные ЗС от каждого КУМ 6.1 по четырем КК ЗС 5 передаются через ФР 2.2 на ПЕВ 2.1 каждого 90-градусного модуля (фиг. 8) ПРД АФУ 2 и излучаются в пространство (фиг. 9) в каждом периоде повторения (ТП).
Отраженные от воздушного объекта радиолокационные сигналы и сигналы радиопомех принимаются (фиг. 9) ПРМ АФУ 1. С выхода каждого ПВВ 1.1 сигнал по КК ПС 4 поступает на свой ПК 7.1 МПУ 7. В каждом ПК 7.1 сигналы усиливаются УВЧ 7.1.4, оцифровываются на высокой частоте АЦП 7.1.6 и поступают на ЦФ 7.1.7. Цифровая фильтрация позволяет обеспечить требуемую идентичность амплитудно-частотных и фазо-частотных характеристик приемников, необходимых для формирования диаграмм направленности (ДН).
С выхода МПУ 7 цифровая информация упаковывается и по интерфейсу Ethernet выдается в ВК 8. Для обработки информации в ВК 8 имеется ОПО 8.3, представляющее собой операционную систему Astra Lunix Edition и СПО 8.4, представляющее собой совокупность взаимосвязанных блоков программ (БП), обеспечивающих: прием и регистрацию входного потока (ПРВПИ) 8.4.1; первичную когерентную обработку сигналов (ПКО) 8.4.2; первичную некогерентную обработку сигналов (ПНО) 8.4.3; траекторную обработку информации (ТО) 8.4.4; а также отображение первичной информации (ОПИ) 8.4.5; отображение траекторной информации (ОТИ) 8.4.6; регистрацию и воспроизведение информации (РВИ) 8.4.7; функциональный контроль (ФК) 8.4.8; управление работой РЛС (УРР) 8.4.9 (фиг. 7).
Сигнальная информация в цифровом виде поступает с выхода МПУ 7 на БП ПРВПИ 8.4.1 (фиг. 7). В БП ПКО 8.4.2 осуществляется внутриимпульсная обработка сигналов (ВИО). В процессе ВИО осуществляется «свертка» сигнала в соответствии с законом его модуляции, тем самым, формируются каналы дальности. Затем производится формирование угломестных диаграмм направленности (ДН) и ДН правого и левого вращения ЭМП, когерентное накопление с формированием доплеровских фильтров и предварительное измерение азимута ВО. В БП ПНО 8.4.3 производится детектирование, некогерентное накопление, пороговая обработка и выделение отметок от воздушных объектов (ВО). Далее в БП 8.4.4 производится траекторная обработка отметок от ВО. При этом производится отделение истинных траекторий ВО от ложных траекторий ВО и окончательное определение координат, скорости и курса ВО. Оценку технического состояния устройств до уровня сменных элементов и РЛС в целом осуществляет БП ФК 8.4.8. Управление режимами работы, техническими параметрами и СПО в РЛС осуществляется с помощью БП УРР 8.4.9.
Выдача выходной информации для внешних потребителей осуществляется в соответствии с согласованными протоколами информационного взаимодействия. Темп обновления информации равен длительности когерентного накопления.
Изобретение разработано на уровне опытного образца РЛС кругового обзора и аппаратно-программного обеспечения к нему.
| название | год | авторы | номер документа |
|---|---|---|---|
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| Способ и станция резонансной радиолокации | 2016 |
|
RU2610832C1 |
| Способ радиолокации целей | 2023 |
|
RU2808952C1 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТОВ | 2007 |
|
RU2347239C1 |
| Радиолокационная станция обнаружения малоразмерных целей | 2020 |
|
RU2744210C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА МОНИТОРИНГА ОТКРЫТЫХ АВТОМОБИЛЬНЫХ СТОЯНОК И ОПРЕДЕЛЕНИЯ СВОБОДНЫХ МЕСТ ДЛЯ ПАРКОВКИ АВТОМОБИЛЕЙ | 2015 |
|
RU2602891C1 |
| Способ сопровождения траектории цели в активно-пассивной радиолокационной системе | 2021 |
|
RU2769566C2 |
| СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТОВ | 2007 |
|
RU2347237C1 |
| Система обработки радиолокационной информации | 2016 |
|
RU2648257C1 |
| Способ и устройство обнаружения радиоуправляемых взрывных устройств с применением беспилотного летательного аппарата | 2018 |
|
RU2745658C2 |



Изобретение относится к радиолокации, в частности к радиолокационным станциям (РЛС) кругового обзора для обнаружения и определения местоположения движущихся целей в ультракоротковолновом диапазоне электромагнитных волн (ЭМВ), и может быть использовано в системах управления воздушным движением (УВД). Достигаемый технический результат - уменьшение массогабаритных характеристик антенной системы, повышение ее надежности и срока службы без снижения разрешающей способности РЛС по дальности и азимуту для обнаружения летательных аппаратов. РЛС кругового обзора содержит передающее антенно-фидерное устройство (ПРД АФУ), приемное антенно-фидерное устройство (ПРМ АФУ) метрового диапазона, ЭМВ, выполненные с независимым электронным сканированием воздушного пространства на передачу и прием. ПРД АФУ соединен одним высокочастотным коаксиальным кабелем (КК) по усиленным зондирующим сигналам с устройством усиления мощности (УУМ) зондирующих сигналов. ПРМ АФУ по отраженным сигналам и сигналам радиопомех соединен другим высокочастотным КК с многоканальным приемным устройством, установленным в аппаратной кабине РЛС. ПРД АФУ содержит плоские рефлекторы, установленные вертикально вокруг оси стационарной невращающейся мачты. Между смежными плоскостями рефлекторов установлены двух ярусные петлевые вибраторы горизонтальной поляризации. ПРМ АФУ содержит четыре идентичных яруса скрещенных между собой в горизонтальной плоскости трех полуволновых вибраторов горизонтальной поляризации, размещенных на стационарной вертикальной невращающейся мачте. 1 з.п. ф-лы, 9 ил.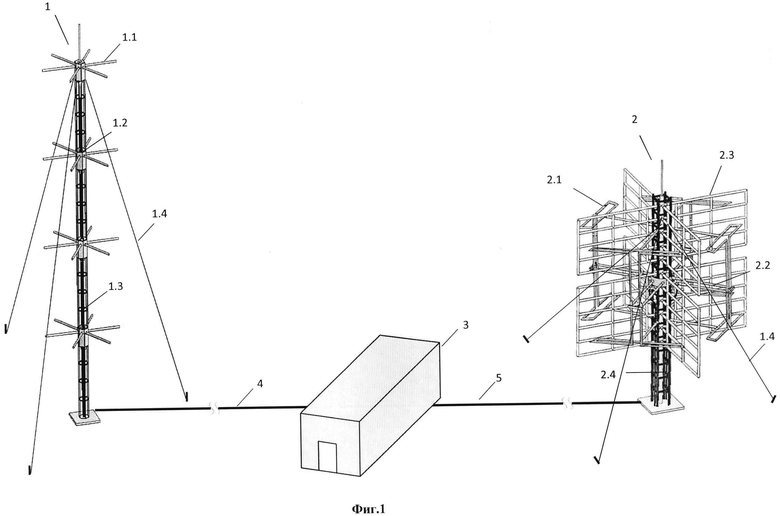
1. Радиолокационная станция кругового обзора, содержащая передающее антенно-фидерное устройство (ПРД АФУ) и приемное антенно-фидерное устройство (ПРМ АФУ) метрового диапазона электромагнитных волн, выполненные с независимым электронным сканированием воздушного пространства на передачу и прием, и соединенные соответственно высокочастотным коаксиальным кабелем по усиленным зондирующим сигналам с устройством усиления мощности (УУМ) зондирующих сигналов (ЗС), а по отраженным сигналам и сигналам радиопомех - высокочастотным коаксиальным кабелем с многоканальным приемным устройством (МПУ), установленным в аппаратной кабине радиолокационной станции (РЛС), отличающаяся тем, что ПРД АФУ содержит установленные вертикально вокруг оси стационарной невращающейся передающей мачты плоские рефлекторы, между смежными плоскостями которых установлены двух ярусные петлевые вибраторы горизонтальной поляризации с центральной запиткой через распределительный фидер, а ПРМ АФУ - четыре идентичных яруса скрещенных между собой в горизонтальной плоскости трех полуволновых вибраторов горизонтальной поляризации, размещенных на стационарной вертикальной невращающейся мачте, причем несущие мачты ПРД АФУ и ПРМ АФУ разнесены на местности на расстояние d, достаточное для защиты МПУ от подавления его приемных трактов зондирующим излучением УУМ, причем аппаратная кабина выполнена в виде двухсекционного кузова-контейнера с фильтровентиляционной установкой, установленной на внешней поверхности кузова, в экранированном отсеке кузова-контейнера размещены шкафы устройства усиления мощности (УУМ), блока антенных переключателей (БАЛ) и блока эквивалента нагрузки (БЭН), а в аппаратном отсеке контейнера - шкаф многоканального приемного устройства (МПУ), вычислительный комплекс (ВК) приема и обработки цифровых сигналов, шкаф электропитания (ЭЛЛ), шкаф для запасных частей и измерительных приборов (ЗИП), кондиционер и блок терморегулирования, аппаратура которых, а также аппаратура экранированного отсека соединена с вычислительным комплексом (ВК) интерфейсными линиями связи, устройство усиления мощности (УУМ) зондирующих сигналов (ЗС) содержит блок управления и контроля (БУК), соединенный по выходу с четырьмя идентичными каналами усиления мощности (КУМ), каждый из которых выполнен с возможностью усиления двух зондирующих сигналов (ЗС) короткой τ1 и увеличенной τ2 длительности на частотах f1 и f2 до номинальной мощности P1 и Р2 соответственно и содержит последовательно соединенные блок контроля и регулирования (БКР), блок усиления мощности (БУМ), блок фильтров гармоник (БФГ) и блок направленных ответвителей (БНО), соединенный через блок антенных переключателей (БАП) с высокочастотным разъемом подключения коаксиального кабеля (КК) для передачи зондирующих сигналов (ЗС) на ПРД АФУ и блоком эквивалента нагрузки (БЭН), многоканальное приемное устройство прямого усиления (МПУ) содержит блок управления, обмена и формирования зондирующих (ЗС) и имитационных (ИС) сигналов (БУОФ), соединенный по стробам и ЗС с блоком управления и контроля (БУК) устройства усиления мощности (УУМ), по командам управления обработкой ОС непосредственно с первыми управляющими входами приемных каналов, а по сигналам синхронизации - через приемник космической навигационной системы (ПКНС), блок синхронизации (БСХ) и разветвитель опорной частоты (РОЧ) - с вторыми управляющими входами приемных каналов, количество Nnk которых выбрано из условия Nпк=Nя*Nв, где Nя - количество ярусов мачты ПРМ АФУ и количество Nв приемных вибраторов, установленных на каждом ярусе для кругового обзора воздушного пространства, каждый приемный канал выполнен с возможностью приема, усиления на высокой частоте, аналого-цифрового преобразования, цифровой фильтрации отраженных сигналов (ОС) и радиопомех, поступающих с вибраторов приемного ПРМ АФУ и содержит последовательно соединенные по обработке ответных сигналов (ОС) ограничитель (ОГР), ключ (КЛ), преселектор (ПРЕ), усилитель высокой частоты (УВЧ), аттенюатор (АТТ), аналого-цифровой преобразователь (АЦП), цифровой фильтр (ЦФ), сигнальный процессор (СП) и шину выходной сигнальной информации, а также - схему управления (СУ), соединенную по управляющему входу с управляющими входами ключа (КЛ), преселектора (ПРЕ), цифрового фильтра (ЦФ), сигнального процессора (СП), соединенного по опорной частоте и частоте повторения с блоком управления, обмена и формирования (БУОФ) зондирующих сигналов (ЗС), цифровой вход/выход которого соединен с вычислительным комплексом (ВК) кабины, вычислительный комплекс выполнен с возможностью цифрового формирования диаграмм направленности (ЦФДН), первичной и траекторной обработки радиолокационной информации, формирования выходной информации и содержит соединенные интерфейсными линиями связи два автоматизированных рабочих места (АРМ), ЭВМ приема и обработки (ЭВМ ПО), включающую последовательно соединенные по обработке цифровых данных блок приема и регистрации входного потока информации (ПРВПИ), блок первичной когерентной обработки сигналов (ПКО), блок первичной некогерентной обработки сигналов (ПНО) и блок траекторной обработки (ТО) информации, соединенный по выходу с шиной подключения системы передачи данных (СПД) внешним потребителям радиолокационной информации и с блоком отображения траекторной информации (ОТИ), второй вход/выход которого соединен с первыми входами/выходами блока отображения первичной информации (ОПИ), блока ПРВПИ, блока ПНО, блока ТО и блока функционального контроля (ФК), второй вход/выход которого по командам ФК соединен через блок управления работой РЛС (УРР) с шиной управления УУМ, шиной управления МПУ, а также соединен по этим командам с вторыми входами/выходами блока ПРВПИ, блока ПКО, блока ТО, третий вход/выход которого соединен со вторым входом/выходом блока регистрации и воспроизведения информации (РВИ).
2. Радиолокационная станция по п. 1, отличающаяся тем, что расстояние d разноса ПРД АФУ и ПРМ АФУ на местности, достаточное для обеспечения защиты приемника от воздействия прямого излучения передатчика, определяется из условия
U(P, L, d)≤Ud,
где:
Р - средняя мощность излучения;
d - расстояние между мачтами;
L - действующий размер приемной антенны
U - напряжение, создаваемое на входе приемника за счет воздействия прямого излучения передатчика;
Ud - максимально допустимое напряжение на входе приемника.
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
| Ускоритель торможения | 1926 |
|
SU5898A1 |
| Молотилка | 1943 |
|
SU63943A1 |
| ПОДВИЖНАЯ НАЗЕМНАЯ ДВУХКООРДИНАТНАЯ РЛС КРУГОВОГО ОБЗОРА МЕТРОВОГО ДИАПАЗОНА ВОЛН | 2003 |
|
RU2256190C2 |
| ВИБРОПОГРУЖАТЕЛЬ | 2017 |
|
RU2649679C1 |
| US 5748142 A, 05.05.1998 | |||
| JP 4720446 B2, 13.07.2011 | |||
| WO 2012093392 A1, 12.07.2012. | |||

