Настоящая заявка основана на и испрашивает приоритет китайской патентной заявки № CN201410242824.X, поданной 3 июня 2014, все содержимое которой включено в настоящее описание по ссылке.
ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее описание относится к области фотографирования и, более подробно, к способу управления фотографированием, устройству и терминалу.
УРОВЕНЬ ТЕХНИКИ
[0002] С ростом популярности мобильных терминалов, таких как смартфоны и планшетные компьютеры и т.д., очень удобно захватывать видео и загружать видео на вебсайт видео. Все больше и больше пользователей приучаются снимать видео или картинки в видео с помощью мобильного терминала, чтобы записать события ежедневной жизни.
[0003] В существующих рассматриваемых технологиях, относящихся к большинству приложений мобильных терминалов, некоторыми нужно управлять вручную, например, обработкой приемов фокусировки с утомительными этапами операций и более длительным требуемым временем; другие могут фокусироваться повторно после того, как регулировка автоматически повторена в отношении несфокусированной картинки, но время для регулировки фокуса является более длинным. В фактическом процессе картинка, захваченная, когда объект, который должен быть сфотографирован, перемещается, может быть наилучшим изображением, которое должно быть захвачено. Поэтому, существующие технологии фокусировки часто не в состоянии захватить лучшее изображение, когда объект, который должен быть сфотографирован, перемещается, особенно для непрерывного движения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Чтобы решить проблему существующих технологий фокусировки, настоящее описание обеспечивает способ, устройство и терминал управления фотографированием.
[0005] Согласно первому аспекту вариантов осуществления настоящего описания предоставлен способ управления фотографированием, применяемый к терминалу. Способ включает в себя: получение скорости движения объекта на картинке, которая должна быть сфотографирована терминалом; определение, находится ли скорость движения в пределах заданного диапазона скоростей; и фокусирование на объекте, если скорость движения находится в пределах заданного диапазона скоростей.
[0006] В связи с первым аспектом, в первой реализации первого аспекта, способ также включает в себя съемку фотографии или видео для объекта после фокусировки на объекте.
[0007] В связи с первым аспектом, во второй реализации первого аспекта, способ также включает в себя: идентификацию типа объекта; определение, является ли тип объекта заранее заданным типом; и фокусирование на объекте, если тип объекта является заранее заданным типом.
[0008] В связи с первым аспектом, в третьей реализации первого аспекта способ также включает в себя: соответственно запись скоростей движения объекта во множестве моментов; вычисление диапазона заранее заданных скоростей согласно скоростям движения объекта, полученным во множестве моментов.
[0009] В связи с первым аспектом, в четвертой реализации первого аспекта картинка, которая должна быть сфотографирована терминалом, включает в себя множество объектов, и способ также включает в себя: выбор целевого объекта из множества объектов на картинке, которая должна быть сфотографирована терминалом; соответственно получение скоростей движения целевого объекта во множестве моментов; и вычисление заранее заданного диапазона скоростей согласно скоростям движения объекта, полученным во множестве моментов.
[0010] В связи с первым аспектом, в пятой реализации первого аспекта выбор целевого объекта из множества объектов на картинке, которая должна быть сфотографирована терминалом, включает в себя: выбор объекта, на котором находится фокус в настоящее время на картинке, которая должна быть сфотографирована терминалом, в качестве целевого объекта.
[0011] В связи с первым аспектом, в шестой реализации первого аспекта, получение скорости движения объекта на картинке, которая должна быть сфотографирована терминалом, включает в себя: прием скорости движения сущности, соответствующей объекту, измеряемого посредством измерении скорости; или вычисление скорости смещения объекта на картинке, которая должна быть сфотографирована, и принятие скорости смещения в качестве скорости движения объекта; или вычисление скорости смещения объекта на картинке, которая должна быть сфотографирована, получение расстояния между сущностью, соответствующей объекту и терминалом, и вычисление скорости движения объекта согласно скорости смещения и расстоянию.
[0012] В связи с первым аспектом, в седьмой реализации первого аспекта, фокусировка на объекте включает в себя: вычисление направления вращения и расстояния вращения объектива терминала относительно терминала согласно скорости движения; и управление объективом для вращения относительно терминала согласно вычисленному направлению вращения и расстоянию вращения; или, вычисление направления движения и расстояния движения терминала относительно объекта согласно скорости движения; и управление терминалом, чтобы перемещаться относительно объекта согласно вычисленному направлению движения и расстоянию движения.
[0013] Согласно второму аспекту вариантов осуществления настоящего описания, устройство управления фотографированием, применяемое к терминалу, предоставлено. Устройство включает в себя блок получения скорости движения, сконфигурированный, чтобы получить скорость движения объекта на картинке, которая должна быть сфотографирована терминалом; блок определения скорости движения, сконфигурированный, чтобы определить, находится ли скорость движения в пределах заранее заданного диапазона скоростей; и блок управления фокусным расстоянием, сконфигурированный, чтобы фокусироваться на объекте, если скорость движения находится в пределах заранее заданного диапазона скоростей.
[0014] В связи со вторым аспектом, в первой реализации второго аспекта, устройство также включает в себя: блок управления фотографированием, сконфигурированный, чтобы снять фотографию или видео для объекта после фокусировки на объекте.
[0015] В связи со вторым аспектом, во второй реализации второго аспекта, устройство также включает в себя: блок идентификации, сконфигурированный, чтобы идентифицировать тип объекта; и блок определения типа, сконфигурированный, чтобы определить, является ли тип объекта заранее заданным типом. Блок управления фокусным расстоянием фокусируется на объекте, если тип объекта является заранее заданным типом.
[0016] В связи со вторым аспектом, в третьей реализации второго аспекта, устройство также включает в себя: первый блок записи скорости движения, сконфигурированный, чтобы соответственно записать скорости движения объекта во множестве моментов; и первый блок получения заранее заданного диапазона скоростей, сконфигурированный, чтобы получить заранее заданный диапазон скоростей согласно скоростям движения объекта, полученным во множестве моментов.
[0017] В связи со вторым аспектом, в четвертой реализации второго аспекта, картинка, которая должна быть сфотографирована терминалом, включает в себя множество объектов, и устройство также включает в себя: блок выбора целевого объекта, сконфигурированный, чтобы выбрать целевой объект из множества объектов на картинке, которая должна быть сфотографирована терминалом; второй блок записи скорости движения, сконфигурированный, чтобы соответственно записывать скорости движения целевого объекта во множестве моментов; и второй блок получения заранее заданного диапазона скоростей, сконфигурированный, чтобы получить заранее заданный диапазон скоростей согласно скоростям движения целевого объекта, полученным во множестве моментов.
[0018] В связи со вторым аспектом, в пятой реализации второго аспекта, выбор целевого объекта включает в себя: субблок выбора, сконфигурированный, чтобы выбрать объект, на котором находится фокус в настоящее время на картинке, которая должна быть сфотографирована терминалом, в качестве целевого объекта.
[0019] В связи со вторым аспектом, в шестой реализации второго аспекта, блок получения скорости движения включает в себя: субблок приемника скорости движения, сконфигурированный, чтобы принять скорость движения сущности, соответствующей объекту, измеренную оборудованием измерения скорости; или, субблок вычисления скорости смещения, сконфигурированный, чтобы вычислять скорость смещения объекта на картинке, которая должна быть сфотографирована, которая берется в качестве скорости движения; или субблок вычисления скорости движения, сконфигурированный, чтобы вычислять скорость смещения объекта на картинке, которая должна быть сфотографирована, чтобы получить расстояние между сущностью, соответствующей объекту и терминалом; и вычислить скорость движения объекта согласно скорости смещения и расстоянию.
[0020] В связи со вторым аспектом, в седьмой реализации второго аспекта блок управления фокусным расстоянием включает в себя: субблок вычисления параметра вращения, сконфигурированный, чтобы вычислять направление вращения и расстояние вращения объектива терминала относительно терминала, и субблок управления вращением, сконфигурированный, чтобы управлять объективом терминала для вращения относительно терминала согласно вычисленному направлению вращения и расстоянию вращения; или субблок вычисления параметра движения, сконфигурированный, чтобы вычислять направление движения и расстояние движения терминала относительно объекта, и субблок управления движением, сконфигурированный, чтобы управлять терминалом для перемещения относительно объекта согласно вычисленному направлению движения и расстоянию движения.
[0021] Согласно третьему аспекту вариантов осуществления настоящего описания предоставлен терминал. Терминал включает в себя: процессор; и память, используемую для хранения выполняемых процессором инструкций. Процессор сконфигурирован: чтобы получать скорость движения объекта на картинке, которая должна быть сфотографирована терминалом; определять, находится ли скорость движения в пределах заранее заданного диапазона скоростей; и фокусировку на объекте, если скорость движения находится в пределах заранее заданного диапазона скоростей.
[0022] Решения согласно вариантам осуществления настоящего раскрытия могут иметь следующие преимущества.
[0023] Согласно способу, предоставленному этим вариантом осуществления настоящего описания, получают скорость движения объекта на картинке, которая должна быть сфотографирована, определяют, находится ли скорость движения в пределах заранее заданного диапазона скоростей согласно скорости движения, и на объекте фокусируются на картинке, которая должна быть сфотографирована, если скорость находится в пределах заранее заданного диапазона скоростей.
[0024] Скорость движения объекта на картинке, которая должна быть сфотографирована, может быть обслужена как обратная связь, и процессом фокусировки можно управлять; поэтому, когда объект на картинке перемещается, камера терминала может автоматически следовать за объектом и фокусироваться на объекте, который делает процесс фокусировки более автоматическим и занимающим меньше времени.
[0025] По сравнению со связанной технологией процесс фокусировки занимает меньше времени, камера терминала может захватить лучшие изображения или сцены во времени во время движения объекта, который должен быть сфотографирован, когда объект, который должен быть сфотографирован, перемещается.
[0026] Нужно подразумевать, что и предшествующее общее описание и нижеследующее подробное описание являются только примерными и пояснительными и не являются ограничительными настоящего раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0027] Сопроводительные чертежи, которые включены в и составляют часть настоящего описания, иллюстрируют варианты осуществления, совместимые с изобретением и, вместе с описанием, служат для пояснения принципов изобретения.
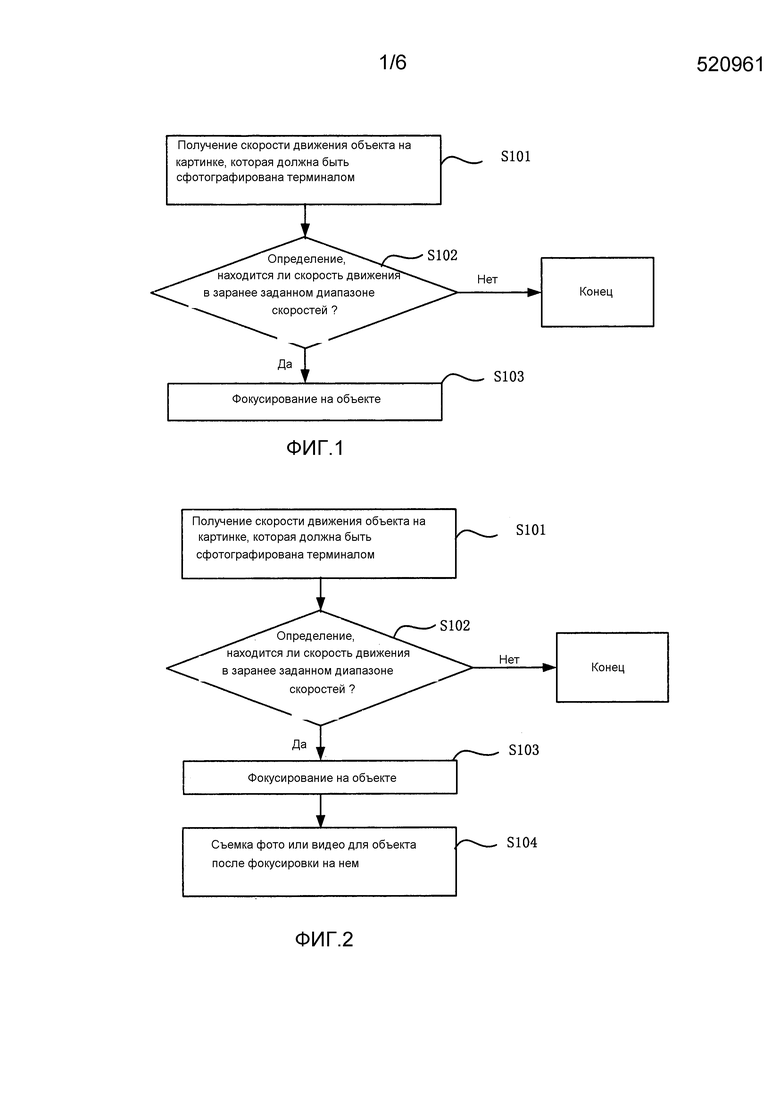
[0028] Фиг. 1 является блок-схемой, показывающей способ управления фотографированием согласно примерному варианту осуществления.
[0029] Фиг. 2 является блок-схемой, показывающей способ управления фотографированием согласно другому примерному варианту осуществления.
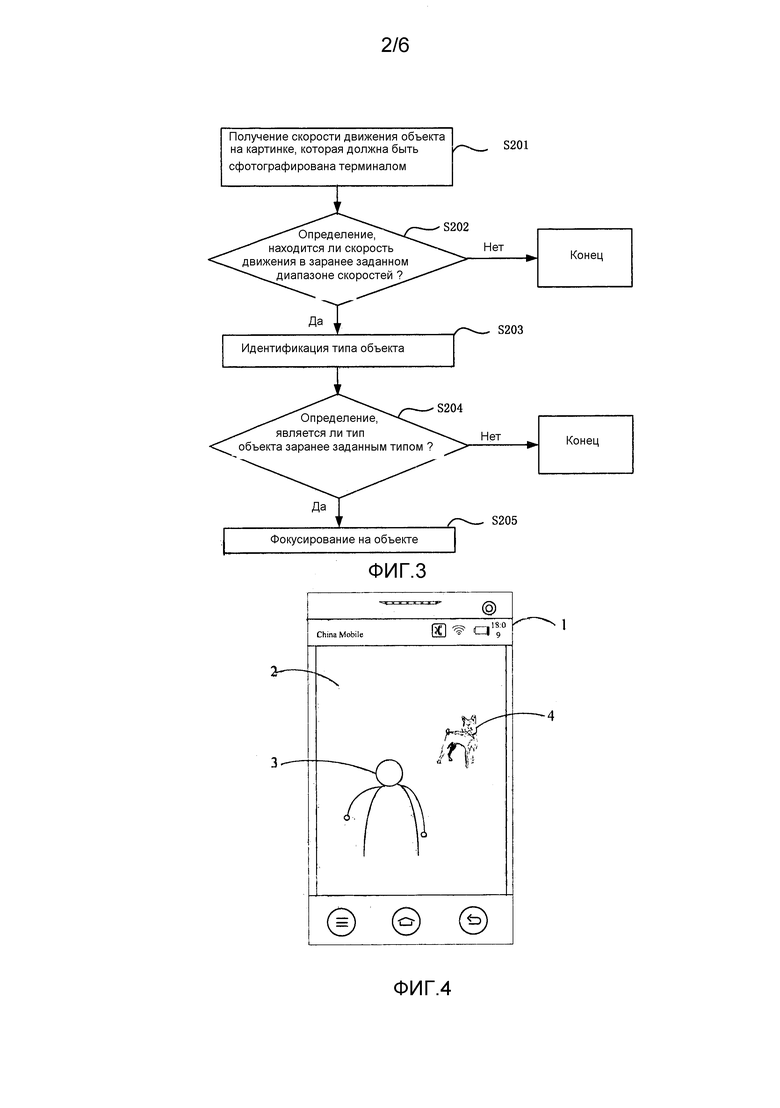
[0030] Фиг. 3 является блок-схемой, показывающей способ управления фотографированием согласно еще одному примерному варианту осуществления.
[0031] Фиг. 4 является диаграммой, показывающей картинку, сфотографированную согласно примерному варианту осуществления.
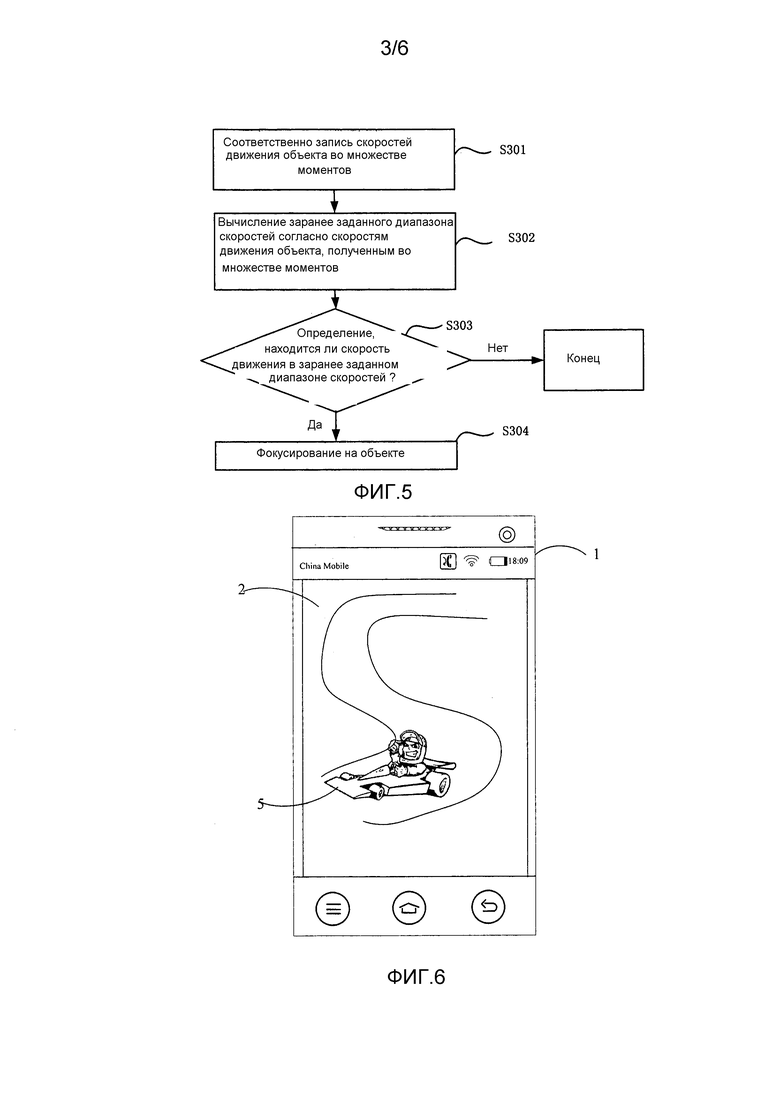
[0032] Фиг. 5 является блок-схемой, показывающей способ управления фотографированием согласно еще одному примерному варианту осуществления.
[0033] Фиг. 6 является диаграммой, показывающей картинку, сфотографированную согласно другому примерному варианту осуществления.
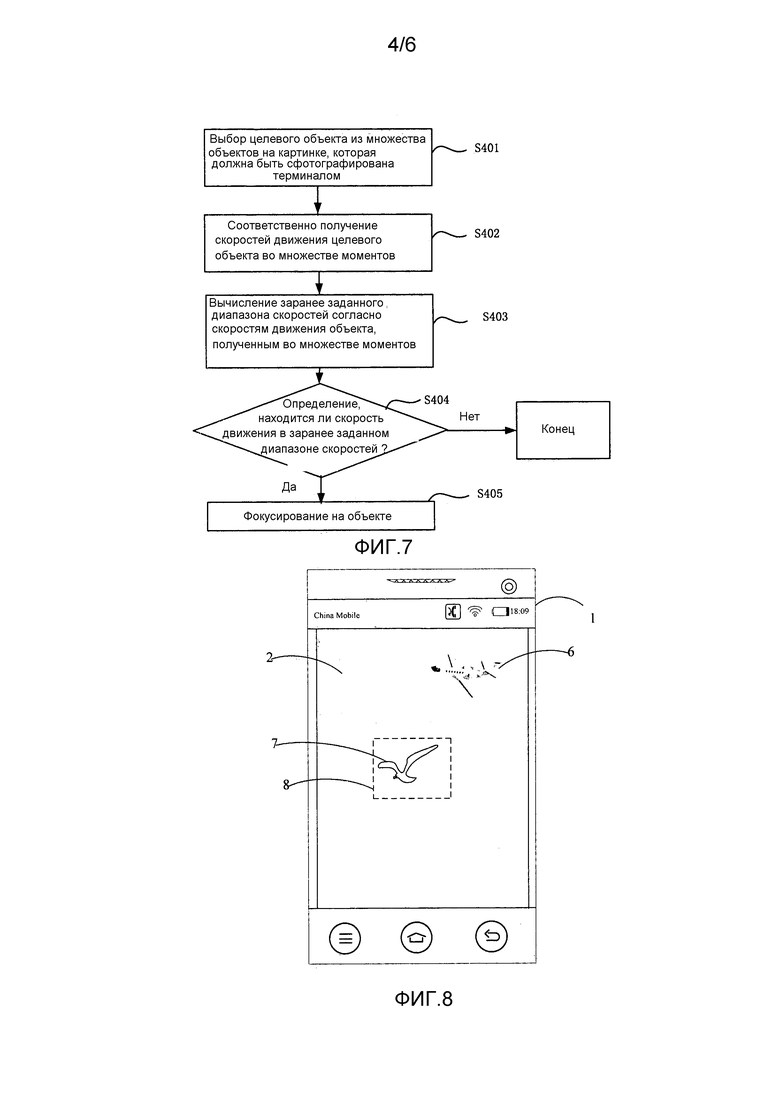
[0034] Фиг. 7 является блок-схемой, показывающей способ управления фотографированием согласно еще одному примерному варианту осуществления.
[0035] Фиг. 8 является диаграммой, показывающей картинку, сфотографированную согласно еще одному примерному варианту осуществления.
[0036] Фиг. 9 является блок-схемой, показывающей устройство управления фотографированием согласно примерному варианту осуществления.
[0037] Фиг. 10 является блок-схемой, показывающей устройство управления фотографированием согласно другому примерному варианту осуществления.
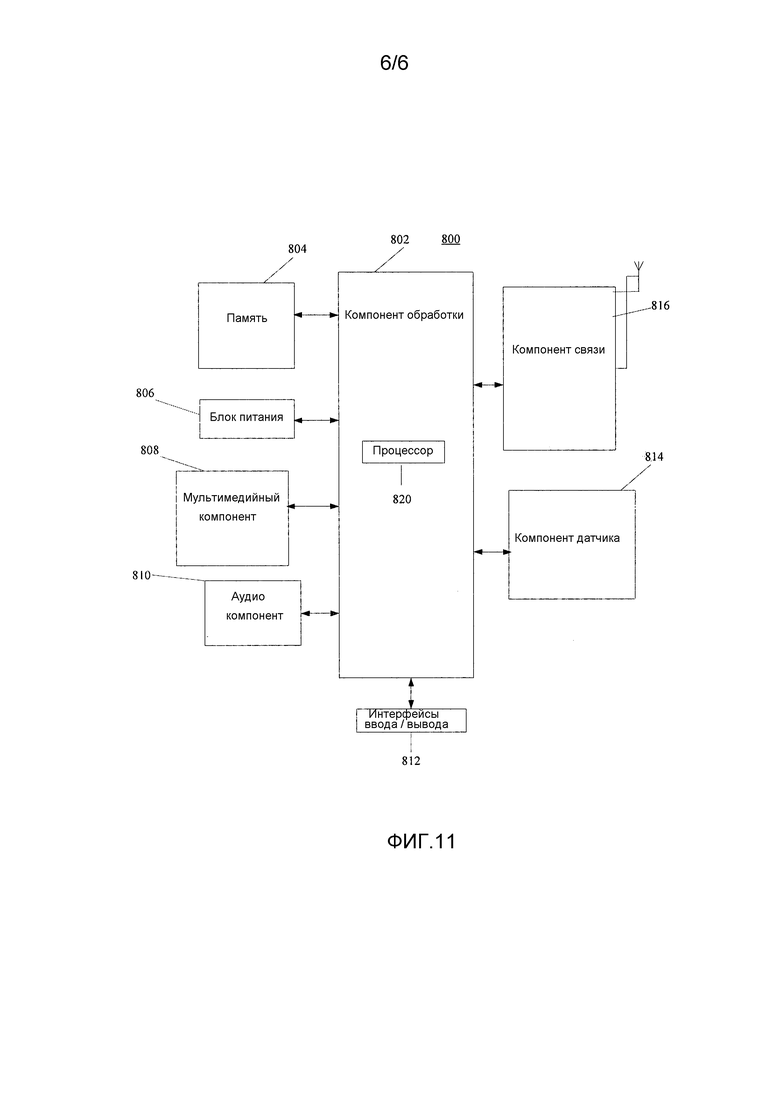
[0038] Фиг. 11 является блок-схемой, показывающей терминал согласно другому примерному варианту осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0039] Подробное описание настоящего описания будет далее приведено в отношении чертежей, чтобы сделать вышеупомянутые объекты, технические решения и преимущества настоящего описания более очевидными.
[0040] Фиг. 1 является блок-схемой, показывающей способ управления фотографированием согласно примерному варианту осуществления. Как показано на фиг. 1, способ управления фотографированием используется в терминале и содержит следующие этапы.
[0041] Этап S101, получают скорость движения объекта на картинке, которая должна быть сфотографирована терминалом.
[0042] Фотографируя здания или другие неподвижные сцены и человека с управляемыми позами, как только фокусировка выполнена, объект на картинке, которая должна быть сфотографирована терминалом, является статическим, таким образом захваченное изображение является очень четким. Но в некоторых сценариях движения, например, фотографируя или снимая видео для спортсменов на спортивных площадках, гоночных автомобилей на автодромах, или движущихся людей на свадьбе, объект, который должен быть сфотографирован, перемещается и захваченное изображение будет нечетким, если фотография будет сделана с заранее заданным фокусным расстоянием, так что сначала скорость движения объекта на картинке, которая должна быть сфотографирована терминалом, получают на этом этапе.
[0043] Скорость движения объекта на картинке, которая должна быть сфотографирована, может быть скоростью смещения объекта на экране терминала, или скоростью движения сущности, соответствующей объекту на картинке, которая должна быть сфотографирована. Например, скорость движения сущности, соответствующей объекту на картинке, которая должна быть сфотографирована, может быть непосредственно измерена оборудованием измерения скорости (например, радаром измерения скорости); или скорость движения объекта на экране может быть измерена сначала, и затем расстояние между сущностью, соответствующей объекту на картинке, которая должна быть сфотографирована, и терминалом, измеряется, и в конечном счете скорость движения объекта получают с помощью косвенного вычисления.
[0044] Этап S102, определяют, попадает ли скорость движения в заранее заданный диапазон скоростей.
[0045] Пользователь терминала может установить по меньшей мере один заранее заданный диапазон скоростей заранее, и оценить скорость движения объекта, который должен быть сфотографирован, согласно опыту при съемке фотографии, и затем вручную выбрать заранее заданный диапазон скоростей. Кроме того, некоторые функции съемки у терминала могут также быть связаны с различными заранее заданными диапазонами скоростей так, чтобы, когда пользователь выбирает некоторую функцию съемки, соответствующий заранее заданный диапазон скоростей был автоматически выбран, например, функция съемки "персонажа" соответствует заранее заданному диапазону скоростей 3 км/ч - 10 км/ч; функция съемки "транспортного средства" соответствует заранее заданному диапазону скоростей 20 км/ч - 200 км/ч; и для камер, установленных по дороге, которая используется для поимки лихачей, заранее заданный диапазон скоростей может также быть непосредственно установлен большим чем 180 км/ч.
[0046] Если скорость движения попадает в заранее заданный диапазон скоростей, на этапе S103 камера терминала фокусируется на описанном объекте. Иначе, процесс завершается.
[0047] Задачей установки заранее заданных диапазонов скоростей состоит в том, чтобы сфокусироваться на объекте, представляющем интерес для пользователя. В вышеупомянутом примере, если пользователь выбирает функцию съемки "персонажа", камера может только сфокусироваться на объекте со скоростью, попадающей в диапазон приблизительно 3 км/ч ~10 км/ч, и транспортные средства с высокой скоростью позади людей могут быть непосредственно проигнорированы. Аналогично, камеры, установленные по дороге, которые используются для поимки лихачей, только интересуется транспортными средствами со скоростью движения больше чем заранее заданная скорость, но транспортные средства, пешеходы или животные со скоростью меньшей, чем заранее заданная скорость, могут быть непосредственно проигнорированы.
[0048] Объект со скоростью движения, попадающей в заранее заданный диапазон скоростей, вызывает интерес у пользователя посредством установки заранее заданного диапазона скоростей; поэтому камера терминала может непосредственно сфокусироваться на объекте. Режимы фокусировки могут включать в себя включение объектива камеры на терминале, и также могут включать в себя управление движением терминала относительно объекта, например, терминал устанавливается на скользящем рельсе, и движение терминала на скользящем рельсе является управляемым.
[0049] Согласно способу, предоставленному этим вариантом осуществления настоящего описания, получают скорость движения объекта на картинке, которая должна быть сфотографирована, определяют, попадает ли скорость движения в заранее заданный диапазон скоростей согласно скорости движения, и на объект на картинке, которая должна быть сфотографирована, фокусируются, если скорость попадает в заранее заданный диапазон скоростей.
[0050] Согласно способу, скорость движения объекта на картинке, которая должна быть сфотографирована, может быть обслужена как обратная связь, и управление процессом фокусировки может быть управляемым, поэтому камера терминала может автоматически следовать за объектом и фокусироваться на объекте, когда объект на картинке, которая должна быть сфотографирована, перемещается, так чтобы процесс фокусировки был более автоматическим и менее занимающим много времени.
[0051] По сравнению со связанной технологией, так как процесс фокусировки занимает меньше времени, камера терминала может захватить лучшие изображения или сцены во времени во время движения объекта, который должен быть сфотографирован, когда объект, который должен быть сфотографирован, перемещается.
[0052] В другом варианте осуществления настоящего описания после этапа S103 способ может также включать в себя следующие этапы, как показано на фиг. 2.
[0053] На этапе S104 выполняют фотографирование или снимают видео для объекта, после фокусировки на объекте.
[0054] В вышеупомянутых этапах S103, хотя фокусировка на объекте завершается и лучшее изображение, или сцена во время движения объекта захватывается, но что касается операции фотографирования, завершается только подготовка. Так, после этого этапа, требуется снять фотографии или видео для объекта после того, как на объекте фокусируются, так, чтобы лучшее изображение или сцена во время движения объекта могли быть зарегистрированы.
[0055] Фиг. 3 является блок-схемой, показывающей способ управления фотографированием согласно еще одному примерному варианту осуществления. Как показано на фиг. 3, способ управления фотографированием используется в терминале, и содержит следующие этапы.
[0056] Этап 201, получают скорость движения объекта на картинке, которая должна быть сфотографирована терминалом.
[0057] Этап 202, определяют, попадает ли скорость движения в заранее заданный диапазон скоростей.
[0058] Если скорость движения находится в пределах заранее заданного диапазона скоростей, на этапе 203, тип объекта определен. Иначе, процесс завершается.
[0059] В варианте осуществления, показанном на фиг. 1, описано, что фокусирование на объекте выполняют, только если скорость движения объекта попадает в заранее заданный диапазон скоростей, который может исключить объекты со скоростью движения вне заранее заданного диапазона скоростей. Однако в практических применениях, могут быть два объекта со скоростью в пределах заранее заданного диапазона скоростей, например, во время фотографирования человека, маленькое животное может попасть в картинку, которая должна быть сфотографирована, и скорости движения маленького животного и человека аналогичны. Как показано на фиг. 4, этот чертеж включает в себя терминал 1, картинку 2, которая должна быть сфотографирована, человека 3 и собаку 4. Поскольку скорость движения собаки близка к таковой человека, необходимо фокусироваться на двух или более объектах на картинке 2, которая должна быть сфотографирована, и таким образом процесс фокусировки может дать сбой.
[0060] Поэтому, на этом этапе в этом варианте осуществления настоящего описания, тип объекта может быть идентифицирован. В фактическом процессе идентификационной информации этот этап может использовать существующую технологию распознавания изображения, чтобы идентифицировать объект, например, распознавание лица, и т.д.
[0061] Этап 204, определяют, является ли тип объекта заранее заданным типом.
[0062] Пользователь может установить множественные заранее заданные типы заранее. Описание заранее заданного типа может сослаться на описание о заранее заданном диапазоне скоростей в показанном варианте осуществления на Фиг. 1, описание которой здесь не повторяется.
[0063] Если тип объекта является заранее заданным типом, на этапе 205, камера терминала фокусируется на объекте.
[0064] Если тип объекта является заранее заданным типом, процесс может непосредственно закончиться. Например, при фотографировании человека, если человек не двигается, а маленькое животное двигается на картинке, которая должна быть сфотографирована, то может быть определено, что тип небольшого животного не является заранее заданным типом посредством идентификации типа, и можно решить не выполнять регулирование фокусного расстояния.
[0065] Способ, предоставленный этим вариантом осуществления настоящего описания, может также идентифицировать тип объекта, если есть множественные объекты, скорость движения всех из которых отвечает требованию на картинке, которая должна быть сфотографирована, и фокусироваться на объекте, только когда его тип является заранее заданным типом, чтобы сделать фокусное расстояние более точным.
[0066] Фиг. 5 является блок-схемой, показывающей способ управления фотографированием согласно еще одному примерному варианту осуществления. Как показано на Фиг. 5, способ управления фотографированием используется в терминале, и содержит следующие этапы.
[0067] Этап 301, скорости движения объекта соответственно регистрируются во множественные моменты.
[0068] Этап 302, заранее заданный диапазон скоростей вычисляют согласно скоростям движения объекта, полученным во множественных моментах.
[0069] Этап 303, определяют, попадает ли скорость движения в заранее заданный диапазон скоростей.
[0070] Если скорость движения попадает в заранее заданный диапазон скоростей, на этапе 304, камера терминала фокусируется на описанном объекте. Иначе, процесс завершается.
[0071] В вышеупомянутых вариантах осуществления заранее заданный диапазон скоростей установлен заранее пользователем. В вариантах осуществления настоящего описания скорость движения объекта на картинке, которая должна быть сфотографирована, может также регистрироваться непрерывно, чтобы вычислять заранее заданный диапазон скоростей согласно зарегистрированным скоростям движения объекта, что может заставить изменять заранее заданный диапазон скоростей согласно скорости движения объекта, например, что касается гоночного автомобиля, заранее заданный диапазон скоростей может быть исправлен непрерывно от стартового этапа до этапа ускорения гоночного автомобиля. Как показано на фиг. 6, номер 5 на фиг. указывает гоночный автомобиль; таким образом этот способ может быть применен к объекту, скорость движения которого значительно изменяется, и на объекте можно всегда фокусироваться во время движения объекта.
[0072] Когда имеется больше чем один объект на картинке, которая должна быть сфотографирована терминалом, если способ, показанный на фиг. 5, реализуется, необходимо записывать скорости движения множественных объектов, и трудно фокусироваться на некотором объекте. Поэтому в варианте осуществления настоящего описания, как показано на фиг. 7, способ может включать в себя следующие этапы.
[0073] Этап 401, целевой объект выбирают из множественных объектов на картинке, которая должна быть сфотографирована терминалом.
[0074] На этом этапе объект, на котором находится фокус в настоящее время на картинке, которая должна быть сфотографирована терминалом, может быть выбран в качестве целевого объекта. Кроме того, целевой объект может быть выбран другими путями, например, объект, расположенный в области фокусировки картинки, которая должна быть сфотографирована терминала, может быть выбран в качестве целевого объекта. Как показано на фиг. 8, самолет 6 и летящая птица 7 находятся на картинке 2, которая должна быть сфотографирована, и текущей областью фокусировки является 8, таким образом выбранным целевым объектом является летящая птица на фиг. 8.
[0075] Этап 402, скорости движения целевого объекта соответственно получают во множественные моменты.
[0076] Этап 403, заранее заданный диапазон скоростей вычисляют согласно скоростям движения объекта, полученным во множественные моменты.
[0077] Этап 404, определяют, попадает ли скорость движения в заранее заданный диапазон скоростей.
[0078] Если скорость движения попадает в заранее заданный диапазон скоростей, на этапе 405, камера терминала фокусируется на описанном объекте. Иначе, процесс завершается.
[0079] Способ, предоставленный этим вариантом осуществления настоящего описания, может выбрать целевой объект из множественных объектов на картинке, которая должна быть сфотографирована, и определять заранее заданный диапазон скоростей согласно скоростям движения объекта, полученным во множественные моменты, на котором можно непрерывно фокусироваться только на одном объекте на картинке, которая должна быть сфотографирована.
[0080] В вышеупомянутых способах в вариантах осуществления настоящего описания при фокусировке на объекте объективом терминала можно управлять для вращения относительно терминала, или терминалом можно управлять, чтобы перемещаться относительно объекта.
[0081] В варианте осуществления фокусировка на объекте посредством вращения объектива, может быть выполнена следующими способами.
[0082] 11) Направление вращения и расстояние вращения объектива терминала относительно терминала вычисляют согласно скорости движения.
[0083] При фактической реализации соответствующее отношение между скоростями движения и направлением вращения и расстоянием вращения может быть установлено заранее, и затем на этом этапе направление вращения и расстояние вращения могут быть вычислены с помощью поисковой таблицы. Конечно, формула также может быть установлена заранее, и направление вращения и расстояние вращения могут быть вычислены, вводя скорость движения в формулу.
[0084] С увеличением скорости движения объекта также увеличится расстояние вращения объектива.
[0085] 12) объективом управляют для вращения относительно терминала согласно вычисленному направлению вращения и расстоянию вращения.
[0086] В другом варианте осуществления фокусировка на объекте, перемещая мобильный терминал, может быть выполнена следующими способами.
[0087] 21) направление движения и расстояние движения терминала относительно объекта вычисляют согласно скорости движения.
[0088] С увеличением скорости движения объекта также увеличится расстояние движения терминала относительно объекта.
[0089] 22) терминалом управляют, чтобы перемещаться относительно объекта согласно вычисленному направлению движения и расстоянию движения.
[0090] В каждом из приведенных выше вариантов осуществления способа, раскрытого в настоящем описание, одинаковые этапы могут перениматься друг от друга, различные этапы могут быть свободно объединены, и результаты комбинирования также принадлежат области защиты настоящего описания.
[0091] Фиг. 9 является блок-схемой, показывающей устройство управления фотографированием согласно примерному варианту осуществления. Со ссылками на фиг. 9, устройство включает в себя блок 11 получения скорости движения, блок 12 определения скорости движения и блок 13 управления фокусным расстоянием.
[0092] Блок 11 получения скорости движения сконфигурирован, чтобы получить скорость движения объекта на картинке, которая должна быть сфотографирована терминалом.
[0093] В этом варианте осуществления настоящего описания блок 11 получения скорости движения может включать в себя субблок приемника скорости движения, субблок вычисления скорости смещения или субблок вычисления скорости движения.
[0094] При этом субблок приемника скорости движения сконфигурирован, чтобы принять скорость движения объекта, соответствующую объекту, измеренную оборудованием измерения скорости.
[0095] Субблок вычисления скорости смещения сконфигурирован, чтобы вычислять скорость смещения объекта на картинке, которая должна быть сфотографирована, которая берется в качестве скорости движения.
[0096] Субблок вычисления скорости движения сконфигурирован, чтобы вычислять скорость смещения объекта на картинке, которая должна быть сфотографирована; получать расстояние между элементом, соответствующим объекту, и терминалом; и вычислять скорость движения объекта согласно скорости смещения и расстоянию.
[0097] Блок 12 определения скорости движения, сконфигурирован, чтобы определять, попадает ли скорость движения в заранее заданный диапазон скоростей.
[0098] Блок 13 управления фокусным расстоянием сконфигурирован, чтобы фокусироваться на объекте, если скорость движения попадает в заранее заданный диапазон скоростей.
[0099] В варианте осуществления настоящего описания блок 13 управления фокусным расстоянием включает в себя субблок вычисления параметра вращения и субблок управления вращением.
[00100] Субблок вычисления параметра вращения сконфигурирован, чтобы вычислять направление вращения и расстояние вращения объектива терминала относительно терминала.
[00101] Субблок управления вращением сконфигурирован, чтобы управлять объективом терминала для вращения относительно терминала согласно вычисленному направлению вращения и расстоянию вращения.
[00102] В другом варианте осуществления блок 13 управления фокусным расстоянием включает в себя субблок вычисления параметра движения и субблок управления движением.
[00103] Субблок вычисления параметра движения сконфигурирован, чтобы вычислять направление движения и расстояние движения терминала относительно объекта.
[00104] Субблок управления движением сконфигурирован, чтобы управлять терминалом для перемещения относительно объекта согласно вычисленному направлению движения и расстоянию движения.
[00105] Устройство, предоставленное этим вариантом осуществления настоящего описания, получает скорость движения объекта на картинке, оценивает, находится ли скорость движения в пределах заранее заданного диапазона скоростей в качестве основы скорости движения, и фокусируется на объекте на картинке, когда скорость находится в пределах заранее заданного диапазона скоростей.
[00106] Поскольку это устройство может использовать преимущество скорости движения объекта на картинке в качестве обратной связи и управлять процессом фокусировки, камера терминала может автоматически следовать за объектом и фокусироваться на объекте, делает процесс фокусировки более автоматическими и менее отнимающими много времени, когда объект на картинке перемещается.
[00107] По сравнению со связанной технологией, так как процесс фокусировки занимает меньше времени, камера терминала может захватить лучшие изображения или сцены во времени при движении объекта, который должен быть сфотографирован, когда объект, который должен быть сфотографирован, перемещается.
[00108] В другом варианте осуществления настоящего описания, как показано на фиг. 10, устройство может также включать в себя блок 14 управления фотографированием.
[00109] Блок 14 управления фотографированием сконфигурирован, чтобы снимать фотографии или видео для объекта, после фокусировки на нем.
[00110] В вышеупомянутом варианте осуществления, хотя фокусировка на объекте завершена, и лучшее изображение, или сцена, в движении объекта захвачена, но что касается операции фотографирования, закончена только подготовка. Поэтому после этих этапов, необходимо снять фотографии или видео для объекта после того, как на объекте сфокусируются, так чтобы лучшее изображение или сцена во время движения объекта могли быть зарегистрированы.
[00111] В другом варианте осуществления настоящего описания устройство может также включать в себя блок идентификации и блок определения типа.
[00112] Блок идентификации сконфигурирован, чтобы идентифицировать тип объекта.
[00113] Блок определения типа сконфигурирован, чтобы определить, является ли тип объекта заранее заданным типом.
[00114] Если тип объекта является заранее заданным типом, блок 13 управления фокусным расстоянием фокусируется на объекте.
[00115] Устройство, предоставленное этим вариантом осуществления настоящего описания, может далее идентифицировать тип объекта, если есть множественные объекты, у всех из которых скорость движения отвечает требованию на картинке, которая должна быть сфотографирована, и будет фокусироваться на объекте, только если его тип является заранее заданным типом, чтобы сделать фокусное расстояние быть более точным.
[00116] В вышеупомянутых вариантах осуществления заранее заданный диапазон скоростей установлен заранее пользователем. В вариантах осуществления настоящего описания скорость движения объекта на картинке, которая должна быть сфотографирована, может также регистрироваться непрерывно, чтобы вычислять заранее заданный диапазон скоростей согласно скоростям движения объекта во множественных записях. Поэтому, в другом варианте осуществления настоящего описания устройство может также включать в себя первый блок записи скорости движения и первый блок получения заранее заданного диапазона скоростей.
[00117] Первый блок записи скорости движения сконфигурирован, чтобы соответственно записывать скорости движения объекта во множественные моменты.
[00118] Первый блок получения заранее заданного диапазона скоростей сконфигурирован, чтобы получать заранее заданный диапазон скоростей согласно скоростям движения объекта, полученным во множественные моменты.
[00119] Когда имеется больше чем один объект на картинке, которая должна быть сфотографирована терминалом, если способ в вышеупомянутом варианте осуществления реализуется, то необходимо записывать скорости движения множественных объектов, и трудно сфокусироваться на некотором объекте. Поэтому, в другом варианте осуществления настоящего описания, устройство может также включать в себя блок выбора целевого объекта, второй блок записи скорости движения и второй блок получения заранее заданного диапазона скоростей.
[00120] Блок выбора целевого объекта сконфигурирован, чтобы выбирать целевой объект из множественных объектов на картинке, которая должна быть сфотографирована терминалом.
[00121] В вариантах осуществления настоящего описания блок выбора целевого объекта может включать в себя субблок выбора, который сконфигурирован, чтобы выбрать объект, на котором в настоящее время находится фокус на картинке, которая должна быть сфотографирована терминалом, в качестве целевого объекта.
[00122] Второй блок записи скорости движения сконфигурирован, чтобы соответственно записывать скорости движения целевого объекта во множественные моменты.
[00123] Второй блок получения заранее заданного диапазона скоростей сконфигурирован, чтобы получить заранее заданный диапазон скоростей согласно скоростям движения целевого объекта, полученным во множественные моменты.
[00124] Устройство, предоставленное этим вариантом осуществления настоящего описания, может выбирать целевой объект из множественных объектов на картинке, которая должна быть сфотографирована, и определять заранее заданный диапазон скоростей согласно скоростям движения объекта, полученным во множественные моменты, которое может непрерывно фокусироваться только на одном объекте на картинке.
[00125] Относительно устройств в вышеупомянутых вариантах осуществления, конкретный способ работы каждого модуля был описан подробно в соответствующих вариантах осуществления способа, описание которых здесь не повторяется.
[00126] Фиг. 11 является блок-схемой, показывающей терминал согласно другому примерному варианту осуществления. Например, терминал может быть мобильным телефоном, компьютером, цифровым радиовещательным терминалом, приемопередатчиком сообщений, игровым контроллером, планшетным устройством, медицинским оборудованием, оборудованием фитнеса или персональным цифровым помощником (PDA) и т.д.
[00127] Со ссылками на Фиг. 11, терминал 800 может включать в себя следующие один или более компонентов: компонент 802 обработки, память 804, блок 806 питания, мультимедийный компонент 808, аудио компонент 810, интерфейсы ввода/вывода (I/O) 812, компонент 814 датчика и компонент 816 связи.
[00128] Компонент 802 обработки обычно управляет всей работой терминала 800, например, операциями, ассоциированными с отображением, телефонными вызовами, передачей данных, работой камеры и записи. Компонент 802 обработки может включать в себя один или более процессоров 802, чтобы выполнить инструкции, чтобы закончить все или часть этапов вышеупомянутого способа. Кроме того, блок 802 обработки может включать в себя один или более модулей, чтобы облегчить взаимодействие между компонентом 802 обработки и другими компонентами. Например, компонент 802 обработки может включать в себя мультимедийный модуль, чтобы облегчить взаимодействие между мультимедийным компонентом 808 и компонентом 802 обработки.
[00129] Память 804 сконфигурирована, чтобы сохранять различные типы данных, чтобы поддержать работу терминала 800. Примеры данных включают в себя инструкции любого приложения или способа, выполняемого в терминале 800, данные контактов, данные записной книжки, сообщения, картинки и видео, и т.д. Память 804 может быть любым типом энергозависимого или энергонезависимого устройства хранения или их комбинации, таким как статическая память с произвольным доступом (SRAM), электрически стираемая программируемая постоянная память (EEPROM), электрически программируемая постоянная память (стираемая программируемая постоянная память), программируемая постоянная память (PROM), постоянная память (ROM), магнитная память, флэш-память, магнитный диск или оптический диск.
[00130] Компонент 806 электропитания обеспечивает питание для различных компонентов терминала 800. Компонент 806 электропитания может включать в себя систему управления питанием, один или более блоков электропитания, и другие компоненты, ассоциированные с генерированием, управлением и распределением электричества для терминала 800.
[00131] Мультимедийный компонент 808 включают в себя экран в качестве интерфейса вывода, обеспеченного между терминалом 800 и пользователями. В некоторых вариантах осуществления экран может включать в себя жидкокристаллический дисплей (LCD) и панель ввода касанием (TP). Если экран включает в себя панель ввода касанием, она может быть реализована как сенсорный экран, используемый для приема сигнала ввода от пользователей. Панель ввода касанием включает в себя один или более датчиков касания, использованных для восприятия касания, скольжения или жеста на панели ввода касанием. Датчики касания могут не только ощущать границы касания или операцию скольжения, но также и обнаружить время продолжительности, и давление, ассоциированные с операцией касания или скольжения. В некоторых вариантах осуществления мультимедийные компоненты 800 включают в себя заранее позиционированную камеру и/или постпозиционированную камеру. Когда терминал 800 находится в режиме работы, таком как режим фотографирование или режим видео, заранее позиционированная камера и/или постпозиционированная камера могут принять внешние мультимедийные данные. Заранее позиционированная камера и постпозиционированная камера могут иметь фиксированные оптические системы объектива или иметь способность масштабирования фокусного расстояния и оптического масштабирования.
[00132] Аудио компонент 810 конфигурируются, чтобы вывести и/или ввести аудио сигналы. Например, аудио компонент 810 включает в себя микрофон (MIC). Когда терминал находится в режиме работы, таком как режим вызова, режим записи или режим распознавания голоса, микрофон сконфигурирован, чтобы принимать внешние аудио сигналы. Принятые аудио сигналы могут быть далее сохранены в памяти 804 или переданы компонентом 816 связи. В некоторых вариантах осуществления аудио компонент 810 далее включают в себя громкоговоритель, используемый для вывода аудио сигналов.
[00133] Интерфейсы 812 ввода/вывода, конфигурируются, чтобы обеспечить интерфейсы между компонентом 802 обработки и внешними модулями интерфейса, которые могут быть клавиатурой, колесом со щелчком, кнопками и т.д. Эти кнопки могут включать в себя, но не ограничиваются, кнопкой возврата, кнопками громкости, кнопкой начала и кнопкой фиксации.
[00134] Компонент 814 датчика включает в себя один или более датчиков, используемых для обеспечения различных аспектов оценки условий для терминала 800. Компонент 814 датчика, например, может обнаружить состояние вкл/выкл терминала 800, относительную позицию компонентов, таких как дисплей и клавиатура терминала 800, компонент 814 датчика может также обнаружить изменение позиции терминала 800 или одного компонента терминала 800, существует ли касание между пользователем и терминалом 800 или нет, ориентацию или ускорение/замедление терминала 800 и температурное изменение терминала 800. Компонент 814 датчика может включать в себя датчик близости, который сконфигурирован, чтобы обнаружить близкие объекты без какого-либо физического контакта. Компонент 814 датчика может также включать в себя световые датчики, такие как CMOS или датчик изображения CCD, используемые в приложениях отображения. В некоторых вариантах осуществления компонент 814 датчика может также включать в себя датчики ускорения, датчики гироскопа, магнитные датчики, датчики давления или температурные датчики.
[00135] Компонент 816 связи сконфигурирован, чтобы облегчить проводные или беспроводные связи между терминалом 800 и другими устройствами. Терминал 800 может получить доступ к беспроводной сети на основании стандарта связи, такого как WiFi, 2G или 3G, или их комбинации. В примерном варианте осуществления компонент 816 связи принимает радио-сигналы от внешней радио-системы управления или информацию вещания через канал телевизионного вещания. В примерном варианте осуществления компонент 816 связи также включает в себя модуль связи в ближней зоне (NFC), чтобы способствовать связи на короткой дистанции. Например, модуль NFC может быть реализован на основании технологии радиочастотной идентификации (RFID), технологии ассоциации инфракрасных данных (IrDA), ультраширокополосной технологии (UWB), технологии Bluetooth (BT) и других технологий.
[00136] В примерном варианте осуществления терминал 800 может быть реализован на основании одного или более из специализированных интегральных схем (ASIC), цифрового сигнального процессора (DSP), цифрового устройства обработки сигналов (DSPD), программируемого логического устройства (PLD) и программируемой пользователем вентильной матрицы (FPGA), контроллера, микроконтроллера, микропроцессора и других электронных компонентов, используемых для выполнения вышеупомянутых способов.
[00137] В примерном варианте осуществления далее обеспечивается невременный считываемый компьютером запоминающий носитель, включающий в себя инструкции, такие как память 804, включающая в себя инструкции, которые могут быть выполнены процессором 820 терминала 800, чтобы выполнить вышеупомянутые способы. Например, невременный считываемый компьютером запоминающий носитель может быть ROM, памятью с произвольным доступом (RAM), CD-ROM, лентой, дискетой и оптическим устройством хранения данных, и т.д.
[00138] Невременный компьютер считываемый запоминающий носитель предоставлен, когда инструкции в запоминающем носителе выполняются процессором мобильных терминалов, чтобы заставить мобильный терминал выполнить некоторый вид способа управления фотографированием, и способ включает в себя: получение скорости движения объекта на картинке, которая должна быть сфотографирована терминалом; определение, попадает ли скорость движения в заранее заданный диапазон скоростей; фокусирование на описанном объекте, если скорость движения попадает в заранее заданный диапазон скоростей.
[00139] Специалистам в данной области техники будут очевидны другие варианты осуществления настоящего описания после рассмотрения спецификации и осуществления изобретения, раскрытого здесь. Настоящая заявка нацелена на охват любого варианта, использования или адаптивной модификации настоящего описания, которые соответствуют общему принципу настоящего описания и включают в себя общие знания или обычные технические средства в уровне техники, не раскрытые настоящим описанием. Описание и варианты осуществления являются только примерными, и реальные объем и форма изобретения определяются нижеследующей формулой изобретения.
[00140] Нужно подразумевать, что точные структуры, описанные выше и показанные на чертежах, не предназначены, чтобы ограничить настоящее описание, и различные модификации и усовершенствования эквивалентов могут быть сделаны в его рамках, которое ограничено приложенной формулой изобретения.

Описаны способ управления фотографированием, устройство и терминал. Способ включает в себя: получение скорости движения объекта на картинке, которая должна быть сфотографирована терминалом; определение, находится ли скорость движения в пределах заранее заданного диапазона скоростей; и фокусирование на объекте, если скорость движения находится в пределах заранее заданного диапазона скоростей. Согласно этому способу скорость движения объекта на картинке, которая должна быть сфотографирована, может быть подана в качестве обратной связи, процессом фокусировки можно управлять; поэтому, когда объект на картинке, которая должна быть сфотографирована, перемещается, камера терминала может автоматически следовать за объектом и фокусироваться на объекте, что заставляет процесс фокусировки быть более автоматическим и менее отнимающим много времени. Технический результат - снижение времени фокусировки и повышение качества изображения движущихся объектов. 3 н. и 12 з.п. ф-лы, 11 ил.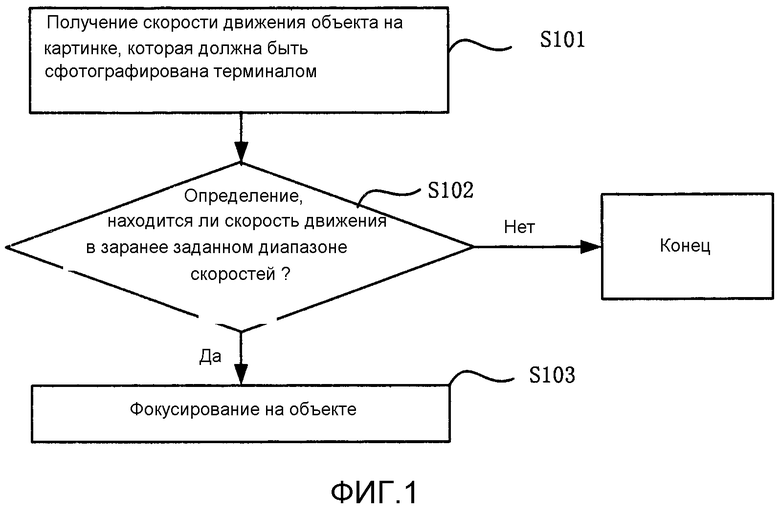
1. Способ управления фотографированием, применяемый к терминалу, отличающийся тем, что способ содержит:
получение скорости движения объекта на картинке, которая должна быть сфотографирована терминалом;
определение, находится ли скорость движения в пределах заранее заданного диапазона скоростей; и
фокусирование на объекте, если скорость движения находится в пределах заранее заданного диапазона скоростей;
при этом способ также содержит:
соответствующую запись скоростей движения объекта во множестве моментов;
вычисление заранее заданного диапазона скоростей согласно изменению соответствующих скоростей движения объекта, полученных во множестве моментов, посредством чего соответствующие скорости движения объекта на картинке, которая должна быть сфотографирована, могут служить в качестве обратной связи для способа управления автоматической фокусировкой, так что камера терминала может автоматически следовать или следить за объектом и фокусироваться на объекте, когда скорость движения объекта на картинке, которая должна быть сфотографирована, изменяется.
2. Способ по п. 1, отличающийся тем, что способ также содержит:
съемку фотографии или видео для объекта после фокусировки на объекте.
3. Способ по п. 1, отличающийся тем, что способ также содержит:
идентификацию типа объекта;
определение, является ли тип объекта заранее заданным типом; и
фокусирование на объекте, если тип объекта является заранее заданным типом.
4. Способ по п. 1, отличающийся тем, что картинка, которая должна быть сфотографирована терминалом, включает в себя множество объектов; и
способ также содержит:
выбор целевого объекта из множества объектов на картинке, которая должна быть сфотографирована терминалом;
соответственно получение скоростей движения целевого объекта во множестве моментов; и
вычисление заранее заданного диапазона скоростей согласно скоростям движения объекта, полученным во множестве моментов.
5. Способ по п. 4, отличающийся тем, что выбор целевого объекта из множества объектов на картинке, которая должна быть сфотографирована терминалом, содержит:
выбор объекта, на котором находится фокус в настоящее время на картинке, которая должна быть сфотографирована терминалом, в качестве целевого объекта.
6. Способ по п. 1, отличающийся тем, что получение скорости движения объекта на картинке, которая должна быть сфотографирована терминалом, содержит:
прием скорости движения сущности, соответствующей объекту, измеренному посредством измерения скоростей;
или
вычисление скорости смещения объекта на картинке, которая должна быть сфотографирована, и принятие скорости смещения в качестве скорости движения объекта;
или
вычисление скорости смещения объекта на картинке, которая должна быть сфотографирована, получение расстояния между сущностью, соответствующей объекту, и терминалом, и вычисление скорости движения объекта согласно скорости смещения и расстоянию.
7. Способ по п. 1, отличающийся тем, что фокусирование на объекте содержит:
вынуждение объектива терминала вращаться относительно терминала;
вычисление направления вращения и расстояния вращения объектива терминала относительно терминала согласно скорости движения; и управление объективом для вращения относительно терминала согласно вычисленному направлению вращения и расстоянию вращения.
8. Устройство управления фотографированием, примененное в терминале, отличающееся тем, что устройство управления фотографированием содержит:
блок получения скорости движения, сконфигурированный, чтобы получить скорость движения объекта на картинке, которая должна быть сфотографирована терминалом;
блок определения скорости движения, сконфигурированный, чтобы определить, находится ли скорость движения в пределах заранее заданного диапазона скоростей;
первый блок записи скорости движения, сконфигурированный, чтобы соответственно записать скорости движения объекта во множестве моментов; и
первый блок получения заранее заданного диапазона скоростей, сконфигурированный, чтобы получить заранее заданный диапазон скоростей согласно скоростям движения объекта, полученным во множестве моментов;
блок управления фокусным расстоянием, сконфигурированный, чтобы фокусироваться на объекте, если скорость движения находится в пределах заранее заданного диапазона скоростей; и
средство для вычисления заранее заданного диапазона скоростей согласно изменению соответствующих скоростей движения объекта, полученных во множестве моментов, посредством чего соответствующие скорости движения объекта на картинке, которая должна быть сфотографирована, могут служить в качестве обратной связи для способа управления автоматической фокусировкой, так что камера терминала может автоматически следовать или следить за объектом и фокусироваться на объекте, когда скорость движения объекта на картинке, которая должна быть сфотографирована, изменяется.
9. Устройство по п. 8, отличающееся тем, что устройство также содержит:
блок управления фотографированием, сконфигурированный, чтобы снять фотографию или видео для объекта после фокусировки на объекте.
10. Устройство по п. 8, отличающееся тем, что устройство также содержит:
блок идентификации, сконфигурированный, чтобы идентифицировать тип объекта; и
блок определения типа, сконфигурированный, чтобы определить, является ли тип объекта заранее заданным типом;
при этом блок управления фокусным расстоянием фокусируется на объекте, если тип объекта является заранее заданным типом.
11. Устройство по п. 8, отличающееся тем, что картинка, которая должна быть сфотографирована терминалом, включает в себя множество объектов; и
устройство также содержит:
блок выбора целевого объекта, сконфигурированный, чтобы выбрать целевой объект из множества объектов на картинке, которая должна быть сфотографирована терминалом;
второй блок записи скорости движения, сконфигурированный, чтобы соответственно записывать скорости движения целевого объекта во множестве моментов; и
второй блок получения заранее заданного диапазона скоростей, сконфигурированный, чтобы получить заранее заданный диапазон скоростей согласно скоростям движения целевого объекта, полученным во множестве моментов.
12. Устройство по п. 11, отличающееся тем, что выбор целевого объекта содержит:
субблок выбора, сконфигурированный, чтобы выбрать объект, на котором находится фокус в настоящее время на картинке, которая должна быть сфотографирована терминалом, в качестве целевого объекта.
13. Устройство по п. 8, отличающееся тем, что блок получения скорости движения содержит:
субблок приемника скорости движения, сконфигурированный, чтобы принять скорость движения сущности, соответствующей объекту, измеренную оборудованием измерения скорости;
или
субблок вычисления скорости смещения, сконфигурированный, чтобы вычислять скорость смещения объекта на картинке, которая должна быть сфотографирована, которая берется в качестве скорости движения;
или
субблок вычисления скорости движения, сконфигурированный, чтобы вычислять скорость смещения объекта на картинке, которая должна быть сфотографирована; получать расстояние между сущностью, соответствующей объекту, и терминалом; и вычислять скорость движения объекта согласно скорости смещения и расстоянию.
14. Устройство по п. 8, содержащее средство для вынуждения вращения объектива терминала относительно терминала, отличающееся тем, что блок управления фокусным расстоянием содержит:
субблок вычисления параметра вращения, сконфигурированный, чтобы вычислять направление вращения и расстояние вращения объектива терминала относительно терминала, и субблок управления вращением, сконфигурированный, чтобы управлять объективом терминала для вращения относительно терминала согласно вычисленному направлению вращения и расстоянию вращения.
15. Терминал, отличающийся тем, что терминал содержит:
процессор; и
память, используемую для хранения выполняемых инструкций процессора;
при этом процессор сконфигурирован, чтобы:
получать скорость движения объекта на картинке, которая должна быть сфотографирована терминалом;
определять, находится ли скорость движения в пределах заранее заданного диапазона скоростей; и
фокусироваться на объекте, если скорость движения находится в пределах заранее заданного диапазона скоростей;
соответственно записывать скорости движения объекта во множестве моментов;
вычислять заранее заданный диапазон скоростей согласно изменению соответствующих скоростей движения объекта, полученных во множестве моментов, посредством чего соответствующие скорости движения объекта на картинке, которая должна быть сфотографирована, могут служить в качестве обратной связи для способа управления автоматической фокусировкой, так что камера терминала может автоматически следовать или следить за объектом и фокусироваться на объекте, когда скорость движения объекта на картинке, которая должна быть сфотографирована, изменяется.
| WO 2013148591 A1 (QUALCOMM INC), 03.10.2013 | |||
| US 2010110178 A1 (CANON KK), 06.05.2010 | |||
| WO 9733262 A1 (LASER TECHNOLOGY INC), 12.09.1997 | |||
| JP 2013118712 A (SUMITOMO ELECTRIC IND LTD), 13.06.2013. |

