Область техники
[001] Варианты осуществления настоящего изобретения относятся к области съемки и картографирования и, например, к способу и устройству для планирования точек выборки для съемки и картографирования, терминалу управления и носителю для хранения данных.
Уровень техники
[002] В последние годы беспилотные летательные аппараты (БПЛА) широко используют в области съемки и картографирования, реагирования на чрезвычайные ситуации, оказания помощи при бедствиях и т.п. благодаря их характеристикам, таким как высокая эффективность, гибкость и низкая стоимость. Технология аэросъемки и картографирования на основе БПЛА (сокращенно называемая «аэросъемкой») может позволить значительно сократить время выполнения работ, а также затраты людских и финансовых ресурсов, связанные с традиционными технологиями аэросъемки и картографирования, и имеет более реалистичную достоверность в областях съемки и картографирования, и т.п.
[003] В технологии аэросъемки и картографирования на основе БПЛА наблюдение за текущей обстановкой в фотографируемой с воздуха области осуществляют с помощью установленного устройства захвата видеоизображения с использованием технологии дистанционной передачи изображений, причем полученные фотографии сшивают с использованием технологии сшивки сфотографированных с воздуха изображений (монтажа) для получения общего изображения сфотографированной с воздуха области. Согласно традиционному способу аэросъемки на основе БПЛА при фотографировании в общем случае мобильную съемку и картографирование выполняют в области, подлежащей съемке и картографированию, путем перемещения вдоль параллельных линий и обычно для обеспечения успешной сшивки требуется определенная степень перекрытия между каждыми двумя последовательными фотографиями. Каждая фотография должна перекрываться в определенной степени с другими фотографиями как в горизонтальном, так и в вертикальном направлениях, для обеспечения нормальной сшивки на последующем этапе и, в общем случае, степень перекрытия, как правило, должна превышать 50% для обеспечения нормальной сшивки на последующем этапе.
[004] В ходе реализации настоящего изобретения авторы изобретения обнаружили, что соответствующие способы в предшествующем уровне техники имеют недостатки, заключающиеся в том, что все традиционные способы аэросъемки на основе БПЛА используют для съемки и картографирования фотографируемой с воздуха области большой территории земной поверхности и в ходе съемки и картографирования необходимо сделать множество фотографий с относительно высокой степенью наложения. Сшивка вышеуказанных фотографий, полученных с помощью БПЛА, занимает большое количество времени и имеет низкую эффективность. Кроме того, если фотографии, полученные с помощью БПЛА, загружают на сервер для их обработки путем сшивки, процессы загрузки и обработки данных занимают больше времени. Кроме того, если для съемки и картографирования небольшого участка земли применяют традиционный способ аэросъемки на основе БПЛА, выполнение операции усложняется и требуется длительная обработка, а также высокие затраты на оборудование.
Раскрытие сущности изобретения
[005] В вариантах осуществления настоящего изобретения предложены способ и устройство для планирования точек выборки для съемки и картографирования, терминал управления и носитель для хранения данных для снижения затрат на осуществление съемки и картографирования, а также для повышения эффективности съемки и картографирования.
[006] В одном варианте осуществления настоящего изобретения предложен способ планирования точек выборки для съемки и картографирования, включающий следующие этапы:
получение опорной точки местоположения фотографирования, соответствующей области, подлежащей съемке и картографированию, и установление отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой местоположения фотографирования.
определение множества вспомогательных точек местоположения фотографирования, соответствующих опорной точке местоположения фотографирования, на основании отношения отображения и заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки; и
использование опорной точки местоположения фотографирования и множества вспомогательных точек местоположения фотографирования в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию.
[007] В некоторых случаях точки съемки в объединенном наборе точек съемки включают: центральную точку съемки и четыре периферийные точки съемки, причем периферийные точки съемки представляют собой четыре вершины прямоугольника с центром в центральной точке съемки;
причем комбинированная фотография, полученная на основании съемки во всех указанных точках съемки из объединенного набора точек съемки, имеет прямоугольную форму.
[008] В некоторых случаях получение опорной точки местоположения фотографирования, соответствующей области, подлежащей съемке и картографированию, включает:
обнаружение операции касания, выполненной пользователем в интерфейсе человеко-компьютерного взаимодействия , и определение точки местоположения на экране на основании указанной операции касания; и
получение из картографических данных об области, подлежащей съемке и картографированию, отображаемой в настоящий момент в интерфейсе человеко-компьютерного взаимодействия , координаты географического местоположения, соответствующей точке местоположения на экране, в качестве опорной точки местоположения фотографирования.
[009] В некоторых случаях обнаружение операции касания, выполненной пользователем в интерфейсе человеко-компьютерного взаимодействия , и определение точки местоположения на экране на основании указанной операции касания, включает по меньшей мере одно из следующих действий:
определение точки, которой коснулся пользователь, в качестве точки местоположения на экране, если обнаружено, что операция касания, выполненная пользователем, представляет собой операцию одноточечного касания;
выбор точки из линейного сегмента, созданного при осуществлении операции касания, выполненной пользователем, в качестве точки местоположения на экране, если обнаружено, что операция касания, выполненная пользователем, представляет собой операцию касания со скольжением по экрану; и
выбор точки в пределах поля, созданного при осуществлении операции касания, выполненной пользователем, в качестве точки местоположения на экране, если обнаружено, что операция касания, выполненная пользователем, представляет собой операцию касания путем рисования поля.
[0010] В некоторых случаях получение опорной точки местоположения фотографирования, соответствующей области, подлежащей съемке и картографированию, включает:
получение центральной точки области, подлежащей съемке и картографированию, в качестве опорной точки местоположения фотографирования.
[0011] В некоторых случаях получение опорной точки местоположения фотографирования, соответствующей области, подлежащей съемке и картографированию, включает:
отправку информации с запросом местоположения на беспилотный летательный аппарат для съемки и картографирования и использование координаты географического местоположения, возвращенной беспилотным летательным аппаратом для съемки и картографирования, в качестве опорной точки местоположения фотографирования;
причем беспилотный летательный аппарат для съемки и картографирования предварительно размещают в местоположении, соответствующем области, подлежащей съемке и картографированию.
[0012] В некоторых случаях получение опорной точки местоположения фотографирования, соответствующей области, подлежащей съемке и картографированию, включает:
получение координаты географического местоположения, введенной пользователем в качестве опорной точки местоположения фотографирования.
[0013] В некоторых случаях установление отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой местоположения фотографирования включает:
установление отношения отображения между опорной точкой местоположения фотографирования и точкой съемки, выбранной пользователем из объединенного набора точек съемки.
[0014] В некоторых случаях установление отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой местоположения фотографирования включает:
установление отношения отображения между центральной точкой съемки в объединенном наборе точек съемки и опорной точкой местоположения фотографирования.
[0015] В некоторых случаях установление отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой местоположения фотографирования включает:
вычисление расстояния между опорной точкой местоположения фотографирования и каждой из основных точек позиционирования в области, подлежащей съемке и картографированию, причем указанные основные точки позиционирования включают: угловые точки области, подлежащей съемке и картографированию, и центральную точку области, подлежащей съемке и картографированию;
получение основной точки позиционирования, расположенной ближе всего к опорной точке местоположения фотографирования, в качестве целевой опорной точки; и
выбор, на основании информации о местоположении в целевой опорной точке в области, подлежащей съемке и картографированию, одной точки съемки, соответствующей информации о местоположении, из объединенного набора точек съемки, и установление отношения отображения между точкой съемки и опорной точкой местоположения фотографирования.
[0016] В некоторых случаях перед определением множества вспомогательных точек местоположения фотографирования, соответствующих опорной точке местоположения фотографирования, на основании отношения отображения и заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки, указанный способ также включает:
получение параметра фотографирования устройства для фотографирования, установленного на беспилотном летательном аппарате для съемки и картографирования, причем указанный параметр фотографирования включает фотографируемую область, соответствующую одной фотографии, беспилотного летательного аппарата для съемки и картографирования на установленной высоте полета, и каждая точка съемки соответствует фотографируемой области, соответствующей одной фотографии; и
определение заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки на основании заданного индекса степени перекрытия фотографий и фотографируемой области, соответствующей одной фотографии;
причем использование опорной точки местоположения фотографирования и множества вспомогательных точек местоположения фотографирования в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию, включает:
использование опорной точки местоположения фотографирования и множества вспомогательных точек местоположения фотографирования в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию, на установленной высоте полета.
[0017] В некоторых случаях определение заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки на основании заданного индекса степени перекрытия фотографий и фотографируемой области, соответствующей одной фотографии, включает:
определение размера одной фотографии на основании размера кадра устройства для фотографирования и пиксельной ширины устройства для фотографирования;
построение двухмерной системы координат и выбор целевой точки в двухмерной системе координат в качестве центральной точки съемки;
создание центральной фотографии в двухмерной системе координат на основании центральной точки съемки и размера одной фотографии;
создание в верхнем левом углу, нижнем левом углу, верхнем правом углу и нижнем правом углу центральной фотографии четырех соответствующих периферийных фотографий, для которых обеспечен индекс степени перекрытия фотографий относительно центральной фотографии;
определение, на основании отношения отображения между размером одной фотографии и фотографируемой областью, соответствующей одной фотографии, значения координаты соответствующей периферийной точки съемки, которая соответствует каждой периферийной фотографии в двухмерной системе координат; и
определение заданных относительных позиционных отношений между отдельными точками съемки в объединенном наборе точек съемки на основании значений координат центральной точки съемки и всех периферийных точек съемки в двухмерной системе координат.
[0018] В некоторых случаях перед получением параметра фотографирования устройства для фотографирования, установленного на беспилотном летательном аппарате для съемки и картографирования, указанный способ также включает:
вычисление установленной высоты полета на основании пиксельной ширины устройства для фотографирования, фокусного расстояния объектива устройства для фотографирования и пиксельного разрешения земной поверхности.
[0019] В некоторых случаях получение параметра фотографирования устройства для фотографирования, установленного на беспилотном летательном аппарате для съемки и картографирования, включает:
вычисление, на основании пиксельной ширины устройства для фотографирования, размера кадра устройства для фотографирования и пиксельного разрешения земной поверхности, фотографируемой области, соответствующей одной фотографии, беспилотного летательного аппарата для съемки и картографирования на установленной высоте полета.
[0020] В некоторых случаях после использования опорной точки местоположения фотографирования и множества вспомогательных точек местоположения фотографирования в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию, указанный способ также включает:
отправку каждой из точек выборки для съемки и картографирования на беспилотный летательный аппарат для съемки и картографирования, так что беспилотный летательный аппарат для съемки и картографирования делает множество фотографий для съемки и картографирования, соответствующих области, подлежащей съемке и картографированию, когда он пролетает в каждой точке выборки для съемки и картографирования, соответствующей высоте полета;
причем все фотографии в множестве фотографий для съемки и картографирования выполнены с возможностью соединения с получением изображения для съемки и картографирования, которое соответствует области, подлежащей съемке и картографированию.
[0021] В одном варианте осуществления настоящего изобретения также предложено устройство для планирования точек выборки для съемки и картографирования, содержащее:
модуль для установления отношения отображения, выполненный с возможностью получения опорной точки местоположения фотографирования, соответствующей области, подлежащей съемке и картографированию, а также установления отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой местоположения фотографирования;
модуль для определения вспомогательной точки местоположения фотографирования, выполненный с возможностью определения множества вспомогательных точек местоположения фотографирования, соответствующих опорной точке местоположения фотографирования, на основании отношения отображения и заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки; и
модуль для определения точек выборки для съемки и картографирования, выполненный с возможностью использования опорной точки местоположения фотографирования и множества вспомогательных точек местоположения фотографирования в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию.
[0022] В одном варианте осуществления настоящего изобретения также предложен терминал управления, выполненный с возможностью управления беспилотным летательным аппаратом, содержащий:
один или более процессоров;
устройство для хранения данных, выполненное с возможностью хранения одной или более программ;
при исполнении одной или более программ один или более процессоров осуществляют способ планирования точек выборки для съемки и картографирования в соответствии с любым из вариантов осуществления настоящего изобретения.
[0023] В одном варианте осуществления настоящего изобретения также предложен компьютерный носитель для хранения данных, на котором хранится компьютерная программа, причем способ планирования точек выборки для съемки и картографирования в соответствии с любым из вариантов осуществления настоящего изобретения осуществляется при исполнении процессором указанной программы.
Краткое описание чертежей
[0024] На ФИГ. 1а представлена блок-схема последовательности операций способа планирования точек выборки для съемки и картографирования в соответствии с первым вариантом осуществления настоящего изобретения;
[0025] на ФИГ. 1b представлено схематическое изображение позиционного распределения каждой точки съемки в объединенном наборе точек съемки согласно первому варианту осуществления настоящего изобретения;
[0026] на ФИГ. 2 представлена блок-схема последовательности операций способа планирования точек выборки для съемки и картографирования в соответствии со вторым вариантом осуществления настоящего изобретения;
[0027] на ФИГ. 3 представлено схематическое изображение устройства для планирования точек выборки для съемки и картографирования в соответствии с третьим вариантом осуществления настоящего изобретения; и
[0028] на ФИГ. 4 представлена принципиальная схема конструкции терминала управления, выполненного с возможностью управления беспилотным летательным аппаратом в соответствии с четвертым вариантом осуществления настоящего изобретения.
Осуществление изобретения
[0029] Ниже настоящее изобретение будет описано более подробно со ссылкой на прилагаемые чертежи и варианты осуществления. Следует понимать, что варианты осуществления, описанные в данном документе, предназначены исключительно для иллюстрации настоящего изобретения и не предназначены для его ограничения.
[0030] Только часть, но не все, содержание, относящееся к настоящему раскрытию, представлено на чертежах для удобства описания. Прежде чем начать более подробное обсуждение примеров осуществления, следует отметить, что некоторые примеры осуществления описаны как процессы или способы, которые изображены в виде блок-схем. Хотя на блок-схемах операции (или этапы) могут быть описаны в виде последовательной обработки, многие из указанных операций могут быть выполнены параллельно, согласованно или одновременно. Кроме того, порядок выполнения операций может быть изменен. После завершения операции обработка может быть прекращена, но могут существовать дополнительные этапы, не показанные на фигуре. Обработка может соответствовать способу, функции, процедуре, части программы, подпрограмме и т.д.
Первый вариант осуществления
[0031] На ФИГ. 1а представлена блок-схема последовательности операций способа планирования точек выборки для съемки и картографирования в соответствии с первым вариантом осуществления настоящего изобретения. Этот вариант осуществления применим к случаю, когда каждая из точек выборки для съемки и картографирования в области, подлежащей съемке и картографированию, успешно получена, причем способ может быть выполнен с помощью устройства для планирования точек выборки для съемки и картографирования, указанное устройство может быть реализовано с помощью программного и/или аппаратного обеспечения и, как правило, может быть встроено в устройство управления (например, дистанционный контроллер БПЛА) и использовано совместно с беспилотным летательным аппаратом для съемки и картографирования, выполняющего аэрофотосъемку. Соответственно, как показано на ФИГ. 1а, способ включает следующие операции:
[0032] Этап 110: получение опорной точки местоположения фотографирования, соответствующей области, подлежащей съемке и картографированию, и установление отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой местоположения фотографирования.
[0033] В данном случае область, подлежащая съемке и картографированию, представляет собой область, имеющую четкие диапазоны широты и долготы, и может представлять собой область любой формы и любого размера. Форма и размер области, подлежащей съемке и картографированию, не ограничиваются в варианте осуществления настоящего изобретения. Опорная точка местоположения фотографирования представляет собой точку местоположения в области, подлежащей съемке и картографированию, которая имеет соответствующую координату географического местоположения. Точка местоположения, описанная выше, может быть выбрана пользователем из области, подлежащей съемке и картографированию (например, кликом мыши или путем непосредственного ввода широты и долготы или т.п.), или может быть автоматически определена на основании формы области, подлежащей съемке и картографированию (точка местоположения может представлять собой, например, центральную точку области, подлежащей съемке и картографированию, или угловую точку области, подлежащей съемке и картографированию, или т.п).
[0034] Объединенное множество точек съемки может представлять собой множество точек съемки, задаваемых на основании заданного правила распределения, в которое может быть включено множество точек съемки, и каждые две точки съемки связаны отношением относительного направления и относительного расстояния. Например, объединенное множество точек съемки включает пять точек съемки, которые расположены, соответственно, в центре и четырех вершинах прямоугольника. В данном случае относительное расстояние между каждой вершиной и центральной точкой составляет 100 м. В другом примере каждая вершина расположена в одном из четырех направлений, соответственно, восток, юг, запад и север. В варианте осуществления настоящего изобретения все точки выборки для съемки и картографирования, которые соответствуют области, подлежащей съемке и картографированию, могут быть получены с помощью объединенного набора точек съемки. В некоторых случаях, одна из точек в области, подлежащей съемке и картографированию, может быть сначала определена как опорная точка фотографируемой области, а затем между опорной точкой фотографируемой области и одной из точек съемки из объединенного набора точек съемки устанавливают отношение отображения.
[0035] Другими словами, между каждыми двумя точками съемки в объединенном наборе точек съемки имеется определенное относительное позиционное отношение, но отношение соответствия между точками съемки и информацией о фактическом географическом местоположении не устанавливают, поэтому точки съемки не могут быть непосредственно отображены на реальную область, подлежащую съемке и картографированию. Если задана информация о фактическом географическом местоположении для одной точки съемки в объединенном наборе точек съемки, может быть определена и получена информация о географическом местоположении для всех точек съемки в объединенном наборе точек съемки.
[0036] Как правило, между фотографиями из множества фотографий, полученных для множества точек съемки из объединенного набора точек съемки, имеются перекрывающиеся области. Соответственно, после получения множества фотографий в множестве точек съемки из объединенного набора точек съемки, указанное множество фотографий может быть объединено и/или сшито для получения полной объединенной области. Указанная объединенная область может полностью охватывать область, подлежащую съемке и картографированию, или может охватывать только участок области, подлежащей съемке и картографированию, причем это не является ограничением в этом варианте осуществления.
[0037] Этап 120: определение, на основании отношения отображения и заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки, множества вспомогательных точек фотографируемой области, соответствующих опорной точке фотографируемой области.
[0038] В данном случае вспомогательные точки фотографируемой области могут представлять собой другие точки местоположения в области, подлежащей съемке и картографированию, которые отличны от опорной точки фотографируемой области.
[0039] Затем, когда отношение отображения между опорной точкой фотографируемой области и одной из точек съемки в объединенном наборе точек съемки будет определено, также может быть определено множество других вспомогательных точек фотографируемой области, соответствующих опорной точке фотографируемой области, на основании определенного отношения отображения и заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки.
[0040] В качестве примера, при условии, что в общей сложности пять точек съемки включено в объединенное множество точек съемки с отношением отображения, установленным между центральной точкой съемки в множестве точек съемки и опорной точкой фотографируемой области, остальные четыре вспомогательных точки фотографируемой области, соответствующее опорной точке фотографируемой области, могут быть определены на основании позиционных соотношений между четырьмя другими точками съемки и центральной точкой съемки в объединенном наборе точек съемки.
[0041] На ФИГ. 1b представлено схематическое изображение позиционного распределения каждой точки съемки в объединенном наборе точек съемки согласно первому варианту осуществления настоящего изобретения. В необязательном варианте осуществления настоящего изобретения, как показано на ФИГ. 1b, точки съемки в объединенном наборе точек съемки включают: центральную точку съемки и четыре периферийные точки съемки, причем периферийные точки съемки представляют собой четыре вершины прямоугольника с центром в центральной точке съемки; причем комбинированная фотография, полученная на основании съемки во всех указанных точках съемки из объединенного набора точек съемки, имеет прямоугольную форму.
[0042] В варианте осуществления настоящего изобретения, показанном на ФИГ. 1b, в некоторых случаях объединенное множество точек съемки может включать пять точек съемки, которые представляют собой, соответственно, центральную точку съемки и четыре периферийные точки съемки. В данном случае центральная точка съемки может представлять собой центр прямоугольника, а, соответственно, периферийные точки съемки могут представлять собой четыре вершины прямоугольника, соответствующего центральной точке съемки. Существует определенное позиционное отношение между каждыми двумя точками съемки и указанное позиционное отношение должно быть установлено таким образом, чтобы оно удовлетворяло условию, позволяющему получить комбинированную прямоугольную фотографию при объединении всех фотографий, сделанных в соответствующих точках фотографируемой области, определенных из всех точек съемки. В данном случае указанный процесс объединения выполняют путем покрытия всех фотографий, соответствующих перекрывающимся друг с другом изображениям. В других вариантах осуществления после завершения картографирования по умолчанию каждая из вспомогательных точек фотографируемой области может быть повернута вокруг опорной точки фотографируемой области путем выполнения пользователем соответствующей операции или может быть перемещена путем выполнения операции, например, выполнения пользователем операции проведения пальцем в горизонтальном направлении.
[0043] В предшествующем уровне техники при формировании точек съемки и картографирования, соответствующих области, подлежащей съемке и картографированию, следует обеспечить, чтобы была задана степень перекрытия между фотографией, сделанной в одной точке съемки и картографирования, и всеми фотографиями, сделанными в других точках съемки в положениях, расположенных смежно по горизонтали и вертикали с указанной фотографией, поскольку мобильную съемку и картографирование необходимо выполнять в области, подлежащей съемке и картографированию, путем перемещения вдоль параллельных линий. В результате этого фотография для съемки и картографирования содержит небольшое количество информации, отличной от информации, содержащейся в других фотографиях для съемки и картографирования, поэтому необходимо сделать большое количество фотографий для полного выполнения съемки и картографирования области, подлежащей съемке и картографированию, а соединение и сшивание фотографий на последующем этапе предполагает большой объем работы в течение большого периода времени. В этом варианте осуществления выбранные пять точек съемки в объединенном наборе точек съемки представляют собой одну центральную точку съемки и четыре периферийные точки съемки, и этого достаточно, если для каждой периферийной точки съемки обеспечена вышеуказанная требуемая степень (например, 60 %, или 70% и т.п.) перекрытия относительно центральной точки съемки, в то время как каждые две периферийные точки съемки не должны иметь такую высокую степень перекрытия между ними. Это позволяет значительно сократить общее количество фотографий для съемки и картографирования, которые необходимо сделать при съемке и отображении области, подлежащей съемке и картографированию, фиксированного размера, в результате чего затраты времени и затраты на оборудование, требуемые для соединения или сшивания фотографий на последующем этапе, могут быть значительно уменьшены. В частности, если указанное решение согласно варианту осуществления настоящего изобретения применить к небольшому участку земли, например, когда участок земли может быть полностью охвачен после того, как множество фотографий, сделанных во всех точках съемки в объединенном наборе точек съемки, объединены или сшиты, указанное решение согласно варианту осуществления настоящего изобретения может быть более предпочтительным по сравнению со съемкой и картографированием в выбранных точках путем перемещения вдоль параллельных линий согласно соответствующим способам из предшествующего уровня техники с точки зрения количества точек съемки и картографирования, а также сложности сшивания на последующем этапе.
[0044] На этапе 130 используют опорную точку фотографируемой области и множество вспомогательных точек фотографируемой области в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию.
[0045] Соответственно, после получения опорной точки фотографируемой области и каждой вспомогательной точки фотографируемой области опорная точка фотографируемой области и вспомогательные точки фотографируемой области могут быть использованы в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию. Беспилотный летательный аппарат для съемки и картографирования может выполнять аэрофотосъемку в каждой из точек выборки для съемки и картографирования и отправлять фотографии, полученные путем выполнения аэрофотосъемки, на соответствующий терминал управления или наземный терминал, чтобы указанный терминал управления мог соединять полученные фотографии для получения конечного изображения для съемки и картографирования. В некоторых случаях беспилотный летательный аппарат для съемки и картографирования может локально осуществлять соединение множества фотографий, поскольку решение согласно варианту осуществления настоящего изобретения может позволить значительно уменьшить количество фотографий для съемки и картографирования, которые необходимо сделать.
[0046] Для полученных фотографий, соответствующих всем точкам выборки для съемки и картографирования, полученных способом планирования точек выборки для съемки и картографирования в соответствии с вариантом осуществления настоящего изобретения, не требуется, чтобы каждые две последовательные фотографии имели определенную степень перекрытия между ними, поэтому количество времени, затрачиваемое на обработку данных изображения, может быть значительно уменьшено.
[0047] В варианте осуществления настоящего изобретения получают опорную точку фотографируемой области, соответствующую области, подлежащей съемке и картографированию, устанавливают отношение отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области, и, одновременно, определяют множество вспомогательных точек фотографируемой области, соответствующих опорной точке фотографируемой области, на основании указанного отношения отображения и заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки, а затем опорную точку фотографируемой области и множество вспомогательных точек фотографируемой области используют в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию. Таким образом, предложен новый способ планирования точек выборки для съемки и картографирования, а ранее использовавшийся режим мобильного планирования на основе параллельных линий заменен на общее планирование множества точек съемки и картографирования на основе объединенного набора точек съемки, таким образом проблемы высокой стоимости и низкой эффективности съемки и картографирования, существующие в ранее использовавшихся способах аэросъемки на основе БПЛА, решены, и достигнуты технические эффекты снижения затрат на съемку и картографирование, а также повышение эффективности съемки и картографирования.
Второй вариант осуществления
[0048] На ФИГ. 2 представлена блок-схема последовательности операций способа планирования точек выборки для съемки и картографирования в соответствии со вторым вариантом осуществления настоящего изобретения. Подробное описание этого варианта осуществления основано на предшествующем варианте осуществления. В этом варианте осуществления представлено множество режимов реализации, используемых для получения опорной точки фотографируемой области, соответствующей области, подлежащей съемке и картографированию, и установления отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области, а также представлены операции, которые необходимо выполнить перед определением множества вспомогательных точек фотографируемой области, соответствующих опорной точке фотографируемой области. Соответственно, как показано на ФИГ. 2, способ согласно этому варианту осуществления может включать следующие этапы:
[0049] Этап 210: получение опорной точки фотографируемой области, соответствующей области, подлежащей съемке и картографированию, и установление отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области.
[0050] В необязательном варианте осуществления настоящего изобретения получение опорной точки фотографируемой области, соответствующей области, подлежащей съемке и картографированию, может включать: обнаружение операции касания, выполненной пользователем в интерфейсе человеко-компьютерного взаимодействия , и определение точки местоположения на экране на основании указанной операции касания; и получение из картографических данных об области, подлежащей съемке и картографированию, отображаемой в настоящий момент в интерфейсе человеко-компьютерного взаимодействия , координаты географического местоположения, соответствующей точке местоположения на экране, в качестве опорной точки фотографируемой области.
[0051] В варианте осуществления настоящего изобретения опорная точка фотографируемой области может быть определена из точки, указанной пользователем в интерфейсе человеко-компьютерного взаимодействия . В некоторых случаях может быть обнаружена операция касания, такая как операция клика, или скольжения или т.п., выполняемая пользователем в интерфейсе человеко-компьютерного взаимодействия , и на основании указанной операции касания, выполненной пользователем, определена одна из точек местоположения на экране в интерфейсе человеко-компьютерного взаимодействия . Затем координату географического местоположения, соответствующую точке местоположения на экране, определяют в качестве опорной точки фотографируемой области на основании картографических данных об области, подлежащей съемке и картографированию, отображаемой в настоящий момент в интерфейсе человеко-компьютерного взаимодействия . В данном случае указанные картографические данные могут представлять собой информацию о широте и долготе или т.п.
[0052] В необязательном варианте осуществления настоящего изобретения обнаружение операции касания, выполненной пользователем в интерфейсе человеко-компьютерного взаимодействия , и определение точки местоположения на экране на основании указанной операции касания может включать по меньшей мере одно из следующего:
определение точки, которой коснулся пользователь, в качестве точки местоположения на экране, если обнаружено, что операция касания, выполненная пользователем, представляет собой операцию одноточечного касания;
выбор точки из линейного сегмента, созданного при осуществлении операции касания, выполненной пользователем, в качестве точки местоположения на экране, если обнаружено, что операция касания, выполненная пользователем, представляет собой операцию касания со скольжением по экрану; и
выбор точки в пределах поля, созданного при касании, выполненном пользователем, в качестве точки местоположения на экране, если обнаружено, что операция касания, выполненная пользователем, представляет собой операцию касания путем рисования поля.
[0053] В варианте осуществления настоящего изобретения определение точки местоположения на экране на основании операции касания, выполненной пользователем в интерфейсе человеко-компьютерного взаимодействия , может быть конкретно реализовано многими способами. В некоторых случаях точка касания, соответствующая операции одноточечного касания, выполняемой пользователем, может быть определена в качестве точки местоположения на экране. Точка на линейном сегменте, созданном при осуществлении операции касания со скольжением по экрану, выполненной пользователем, также может быть использована в качестве точки местоположения на экране. Например, средняя точка линейного сегмента может быть использована в качестве точки местоположения на экране. Точка в пределах поля, созданная при осуществлении операции касания путем рисования поля, выполненной пользователем, также может быть использована в качестве точки местоположения на экране и, например, центральная точка поля может быть использована в качестве точки местоположения на экране.
[0054] В необязательном варианте осуществления настоящего изобретения получение опорной точки фотографируемой области, соответствующей области, подлежащей съемке и картографированию, также может включать: получение центральной точки области, подлежащей съемке и картографированию, в качестве опорной точки фотографируемой области.
[0055] Кроме того, в варианте осуществления настоящего изобретения опорная точка фотографируемой области также может быть автоматически создана терминалом управления, который управляет беспилотным летательным аппаратом для съемки и картографирования. Например, центральную точку области, подлежащей съемке и картографированию, в которой находится беспилотный летательный аппарат для съемки и картографирования, непосредственно используют в качестве опорной точки фотографируемой области.
[0056] В необязательном варианте осуществления настоящего изобретения получение опорной точки фотографируемой области, соответствующей области, подлежащей съемке и картографированию, также может включать: отправку информации с запросом местоположения на беспилотный летательный аппарат для съемки и картографирования и использование координаты географического местоположения, возвращенной беспилотным летательным аппаратом для съемки и картографирования, в качестве опорной точки фотографируемой области; причем беспилотный летательный аппарат для съемки и картографирования предварительно размещают в местоположении, соответствующем области, подлежащей съемке и картографированию.
[0057] Кроме того, перед отправкой информации с запросом местоположения на беспилотный летательный аппарат для съемки и картографирования способ также может включать: прием по меньшей мере одной команды управления полетом, введенной пользователем для управления беспилотным летательным аппаратом для съемки и картографирования, и отправку команды управления полетом на беспилотный летательный аппарат для съемки и картографирования; отправку команды выполнения свободного полета на беспилотный летательный аппарат для съемки и картографирования для управления беспилотным летательным аппаратом для съемки и картографирования таким образом, чтобы он выполнял свободный полет в текущем местоположении, после подтверждения того, что принят ответ с подтверждением местоположения, введенный пользователем; причем команда управления полетом управляет беспилотным летательным аппаратом для съемки и картографирования таким образом, чтобы он перемещался в воздухе в заданном направлении и/или на заданное расстояние.
[0058] В варианте осуществления настоящего изобретения опорная точка фотографируемой области также может быть определена из информации о местоположении, указанной пользователем. В некоторых случаях пользователь может отправлять информацию с запросом местоположения на беспилотный летательный аппарат для съемки и картографирования с помощью терминала управления. Например, пользователь инициирует установленный идентификатор в интерфейсе человеко-компьютерного взаимодействия терминала управления для отправки информации с запросом местоположения на беспилотный летательный аппарат для съемки и картографирования, чтобы запросить информацию о текущем местоположении беспилотного летательного аппарата для съемки и картографирования. После получения информации с запросом местоположения беспилотный летательный аппарат для съемки и картографирования определяет текущую координату географического местоположения с помощью собственного устройства позиционирования и возвращает текущую координату географического местоположения на терминал управления. Терминал управления может непосредственно использовать точку местоположения, соответствующую принятой координате географического местоположения, в качестве опорной точки фотографируемой области. Соответственно, точка наземной проекции беспилотного летательного аппарата для съемки и картографирования должна быть расположена в пределах области, подлежащей съемке и картографированию, при отправке координаты географического местоположения на терминал управления.
[0059] В необязательном варианте осуществления настоящего изобретения получение опорной точки фотографируемой области, соответствующей области, подлежащей съемке и картографированию, также может включать: получение координаты географического местоположения, введенной пользователем в качестве опорной точки фотографируемой области.
[0060] В варианте осуществления настоящего изобретения координата географического местоположения, введенная пользователем, может быть непосредственно использована в качестве опорной точки фотографируемой области. В некоторых случаях пользователь может ввести координаты географического местоположения с помощью экранной клавиатуры в интерфейсе человеко-компьютерного взаимодействия, цифровой клавиатуры в терминале управления, голосового ввода или т.п.
[0061] В необязательном варианте осуществления настоящего изобретения установление отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области может включать: установление отношения отображения между одной точкой съемки, выбранной пользователем из объединенного набора точек съемки, и опорной точкой фотографируемой области.
[0062] Соответственно, после получения опорной точки фотографируемой области пользователь может произвольно выбрать одну точку съемки из всех точек съемки в объединенном наборе точек съемки, а устанавливают отношение отображения между точкой съемки в объединенном наборе точек съемки, выбранной пользователем, и опорной точкой фотографируемой области.
[0063] В необязательном варианте осуществления настоящего изобретения установление отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области также может включать: установление отношения отображения между центральной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области.
[0064] В варианте осуществления настоящего изобретения в некоторых случаях отношение отображения может быть установлено непосредственно между центральной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области.
[0065] В необязательном варианте осуществления настоящего изобретения установление отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области также может включать: вычисление расстояния между опорной точкой фотографируемой области и каждой из основных точек позиционирования в области, подлежащей съемке и картографированию, причем указанные основные точки позиционирования включают: угловые точки области, подлежащей съемке и картографированию, и центральную точку области, подлежащей съемке и картографированию; получение основной точки позиционирования, расположенной ближе всего к опорной точке фотографируемой области, в качестве целевой опорной точки; выбор, на основании информации о местоположении в целевой опорной точке в области, подлежащей съемке и картографированию, одной точки съемки, соответствующей информации о местоположении, из объединенного набора точек съемки, и установление отношения отображения между точкой съемки и опорной точкой фотографируемой области.
[0066] В варианте осуществления настоящего изобретения в некоторых случаях отношение отображения также может быть определено на основании отношения расстояний между опорной точкой фотографируемой области и каждой из основных точек позиционирования в области, подлежащей съемке и картографированию. В качестве основных точек позиционирования используют угловые точки области, подлежащей съемке и картографированию, и центральную точку области, подлежащей съемке и картографированию, вычисляют расстояние между опорной точкой фотографируемой области и каждой из основных точек позиционирования области, подлежащей съемке и картографированию, и получают основную точку позиционирования, расположенную ближе всего к опорной точке фотографируемой области, в качестве целевой опорной точки. Затем, на основании информации о местоположении целевой опорной точки в области, подлежащей съемке и картографированию, из объединенного набора точек съемки выбирают одну точку съемки, соответствующую информации о местоположении, и устанавливают отношение отображения между указанной точкой съемки и опорной точкой фотографируемой области. Например, если целевая опорная точка расположена в верхней левой части области, подлежащей съемке и картографированию, одна точка съемки в верхнем левом углу может быть выбрана из объединенного набора точек съемки, и устанавливают отношение отображения между указанной точкой съемки и опорной точкой фотографируемой области.
[0067] Этап 220: Вычисляют установленную высоту полета беспилотного летательного аппарата для съемки и картографирования на основании пиксельной ширины устройства для фотографирования, фокусного расстояния объектива устройства для фотографирования и пиксельного разрешения земной поверхности.
[0068] Понятно, что если устройство для фотографирования, такое как камера беспилотного летательного аппарата для съемки и картографирования, имеет фиксированные параметры фотографирования, высота полета беспилотного летательного аппарата для съемки и картографирования непосредственно влияет на пиксельное разрешение земной поверхности. Пиксельное разрешение земной поверхности, в свою очередь, непосредственно определяет зону области, подлежащую съемке и картографированию, которая может быть охвачена одной фотографией. Таким образом, прежде чем область, подлежащая съемке и картографированию, будет сфотографирована с воздуха с использованием беспилотного летательного аппарата для съемки и картографирования, сначала необходимо определить установленную высоту полета беспилотного летательного аппарата для съемки и картографирования. Установленная высота полета беспилотного летательного аппарата для съемки и картографирования может быть вычислена на основании пиксельной ширины устройства для фотографирования, фокусного расстояния объектива устройства для фотографирования и пиксельного разрешения земной поверхности. В некоторых случаях формула, в которой высота полета = пиксельному разрешению земной поверхности * фокусное расстояние объектива / пиксельную ширину, может быть получена из формулы, в которой пиксельное разрешение земной поверхности = высоте полета * пиксельную ширину / фокусное расстояние объектива. В данном случае пиксельная ширина = размеру ширины датчика устройства для фотографирования / ширину кадра.
[0069] Этап 230: получение параметра фотографирования устройства для фотографирования, установленного на беспилотном летательном аппарате для съемки и картографирования, причем параметр фотографирования включает фотографируемую область, соответствующую одной фотографии (область, фотографируемую в виде одной фотографии), беспилотным летательным аппаратом для съемки и картографирования на установленной высоте полета, причем каждая точка съемки соответствует фотографируемой области, соответствующей одной фотографии.
[0070] В данном случае фотографируемая область, соответствующая одной фотографии, представляет собой фактическую область, подлежащую съемке и картографированию, которая может быть захвачена в виде одной фотографии.
[0071] В варианте осуществления настоящего изобретения, поскольку необходимо соединять фотографии, полученные беспилотным летательным аппаратом для съемки и картографирования, для получения конечного изображения для съемки и картографирования, необходимо определить фотографируемую область, соответствующую одной фотографии, беспилотного летательного аппарата для съемки и картографирования на установленной высоте полета, чтобы определить заданное относительное позиционное отношение между каждыми двумя точками съемки в объединенном наборе точек съемки на основании размера фотографируемой области, соответствующей одной фотографии. Каждая точка съемки соответствует фотографируемой области, соответствующей одной фотографии, и, например, точка съемки представляет собой среднюю точку или одну из вершин фотографируемой области, соответствующей одной фотографии.
[0072] В необязательном варианте осуществления настоящего изобретения получение параметра фотографирования устройства для фотографирования, установленного на беспилотном летательном аппарате для съемки и картографирования, может включать: вычисление фотографируемой области, соответствующей одной фотографии, беспилотного летательного аппарата для съемки и картографирования на установленной высоте полета на основании пиксельной ширины устройства для фотографирования, размера кадра устройства для фотографирования и пиксельного разрешения земной поверхности.
[0073] Кроме того, в варианте осуществления настоящего изобретения фотографируемая область, соответствующая одной фотографии, беспилотного летательного аппарата для съемки и картографирования на установленной высоте полета может быть вычислена на основании пиксельной ширины устройства для фотографирования, размера кадра устройства для фотографирования и пиксельного разрешения земной поверхности. В некоторых случаях фотографируемая область, соответствующая одной фотографии = пиксельному разрешению земной поверхности * размер кадра, а пиксельное разрешение земной поверхности = высоте полета * пиксельную ширину / фокусное расстояние объектива.
[0074] А именно, длина, которую можно сфотографировать в одной фотографии = пиксельному разрешению земной поверхности * длину кадра; а ширина, которую можно сфотографировать в одной фотографии = пиксельному разрешению земной поверхности * ширину кадра. Например, если размер кадра составляет 3456 * 4608, а пиксельное разрешение земной поверхности составляет 0,05 м, фотографируемая область, соответствующая одной фотографии, составляет 172,8 м * 230,4 м.
0075] Этап 240: определение заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки на основании заданного индекса степени перекрытия фотографий и фотографируемой области, соответствующей одной фотографии.
[0076] В данном случае заданный индекс степени перекрытия фотографий может представлять собой индекс степени перекрытия, установленный на основании фактических требований, например, 50%, 60%, 70%, или т.п. Хотя числовое значение заданного индекса степени перекрытия фотографий не ограничено в варианте осуществления настоящего изобретения, заданный индекс степени перекрытия фотографий должен удовлетворять тому требованию, чтобы, когда все фотографии соединены из перекрывающихся участков, можно было образовать комбинированный прямоугольник.
[0077] Соответственно, в варианте осуществления настоящего изобретения заданное относительное позиционное отношение между каждыми двумя точками съемки в объединенном наборе точек съемки может быть определено на основании заданного индекса степени перекрытия фотографий и фотографируемой области, соответствующей одной фотографии.
[0078] В необязательном варианте осуществления настоящего изобретения определение заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки на основании заданного индекса степени перекрытия фотографий и фотографируемой области, соответствующей одной фотографии, может включать:
определение размера одной фотографии на основании размера кадра устройства для фотографирования и пиксельной ширины устройства для фотографирования;
построение двухмерной системы координат и выбор целевой точки в качестве центральной точки съемки в двухмерной системе координат;
создание центральной фотографии в двухмерной системе координат на основании центральной точки съемки и размера одной фотографии;
создание в верхнем левом углу, нижнем левом углу, верхнем правом углу и нижнем правом углу центральной фотографии четырех соответствующих периферийных фотографий, для которых обеспечен индекс степени перекрытия фотографий относительно центральной фотографии;
определение на основании отношения отображения между размером одной фотографии и фотографируемой областью, соответствующей одной фотографии, значения координаты каждой периферийной точки съемки, соотнесенной с соответствующей периферийной фотографией в двухмерной системе координат; и
определение заданных относительных позиционных отношений между каждыми двумя точками съемки в объединенном наборе точек съемки на основании значений координат центральной точки съемки и всех периферийных точек съемки в двухмерной системе координат.
[0079] В данном случае целевой точкой может быть любая точка в двухмерной системе координат. Например, целевая точка может представлять собой исходную точку двухмерной системы координат.
[0080] В некоторых случаях при определении заданных относительных позиционных отношений между каждыми двумя точками съемки в объединенном наборе точек съемки сначала может быть определен размер одной фотографии на основании размера кадра устройства для фотографирования и пиксельной ширины устройства для фотографирования. В данном случае размер одной фотографии = размеру кадра * пиксельную ширину (а именно, длина одной фотографии = длине кадра * пиксельную ширину; а ширина одной фотографии = ширине кадра * пиксельную ширину). Затем, целевую точку выбирают в двухмерной системе координат в качестве центральной точки съемки в объединенном наборе точек съемки. Кроме того, центральную фотографию создают в двухмерной системе координат на основании центральной точки съемки и размера одной фотографии. Например, соответствующую центральную фотографию создают с использованием центральной точки съемки в качестве центральной точки центральной фотографии и на основании размера одной фотографии. Затем, на основании размера одной фотографии и степени перекрытия фотографий для четырех соответствующих периферийных фотографий, соответствующих центральной фотографии, может быть создан индекс в четырех ориентациях, т.е. в верхнем левом углу, нижнем левом углу, верхнем правом углу и нижнем правом углу центральной фотографии. Каждая из центральной фотографии и четырех периферийных фотографий, соответствующих ей, не является сделанной фотографией в обычном смысле, а представляет собой прямоугольную область того же размера и формы, что и одна фотография. Соответственно, после получения центральной фотографии и четырех соответствующих ей периферийных фотографий значение координаты для соответствующих периферийных точек съемки, соответствующих каждой периферийной фотографии в двухмерной системе координат, может быть определено на основании отношения отображения между размером одной фотографии и фотографируемой областью, соответствующей одной фотографии. Например, если размер одной фотографии составляет 10 см * 10 см, индекс степени наложения фотографий составляет 50%, периферийные фотографии, соответствующие верхнему левому углу, нижнему левому углу, верхнему правому углу и нижнему правому углу, соответственно, соотнесены с областями, которые могут быть сфотографированы с получением отдельных фотографий в верхнем левом углу, нижнем левом углу, верхнем правом углу и нижнем правом углу, а отношение отображения между размером одной фотографии и фотографируемой областью, соответствующей одной фотографии, равно 1:200, то фотографируемая область, соответствующая одной фотографии, имеет размер, соответственно, 20 м * 20 м. Если центральные точки периферийных фотографий используют в качестве соответствующих периферийных точек съемки, а начало координат используют в качестве центральной точки съемки, соответствующие периферийные точки съемки могут иметь значения координат, соответственно, (-10, 10), (-10, - 10), (10, 10) и (10, -10) в единицах измерения-метрах. Соответственно, при получении соответствующего значения координаты, соответствующего каждой периферийной точке съемки, заданные относительные позиционные отношения между каждыми двумя точками съемки в объединенном наборе точек съемки могут быть определены на основании значений координат центральной точки съемки и всех периферийных точек съемки в двухмерной системе координат. Например, в приведенном выше примере относительное расстояние между периферийными точками съемки, расположенными в отдельных вершинах в объединенном наборе точек съемки, составляет 20 м, а относительное расстояние между центральной точкой съемки в центральной точке и каждой периферийной точкой съемки составляет  м.
м.
[0081] Этап 250: определение множества вспомогательных точек фотографируемой области, соответствующих опорной точке фотографируемой области, на основании отношения отображения и заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки.
[0082] В необязательном примере предполагается, что относительное расстояние между периферийными точками съемки, расположенными в отдельных вершинах в объединенном наборе точек съемки, составляет 20 м, а относительное расстояние между центральной точкой съемки в центральной точке и каждой периферийной точкой съемки составляет м. Устанавливают отношение отображения между центральной точкой съемки и опорной точкой фотографируемой области, кроме того, относительное расстояние между другими вспомогательными точками фотографируемой области составляет 20 м, а относительное расстояние между каждая вспомогательной точкой фотографируемой области и опорной точкой фотографируемой области составляет м.
[0083] Этап 260: использование опорной точки фотографируемой области и множества вспомогательных точек фотографируемой области в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию, на высоте полета.
[0084] Соответственно, в варианте осуществления настоящего изобретения полученная опорная точка фотографируемой области и множество вспомогательных точек фотографируемой области могут быть использованы в качестве точек выборки для съемки и картографирования, соответствующих установленной высоте полета беспилотного летательного аппарата для съемки и картографирования.
[0085] Этап 270: отправка каждой из точек выборки для съемки и картографирования на беспилотный летательный аппарат для съемки и картографирования, так что беспилотный летательный аппарат для съемки и картографирования делает множество фотографий для съемки и картографирования, соответствующих области, подлежащей съемке и картографированию, когда он летит к каждой точке выборки для съемки и картографирования, соответствующей высоте полета.
[0086] Соответственно, в варианте осуществления настоящего изобретения терминал управления выполнен с возможностью отправки полученных точек выборки для съемки и картографирования на беспилотный летательный аппарат для съемки и картографирования, а беспилотный летательный аппарат для съемки и картографирования выполнен с возможностью перемещения в каждую из точек выборки для съемки и картографирования, соответствующих установленной высоте полета, для фотографирования области, подлежащей съемке и картографированию, в результате чего получают множество фотографий для съемки и картографирования. Все фотографии в множестве фотографий для съемки и картографирования могут быть выполнены с возможностью соединения с получением изображения для съемки и картографирования, которое соответствует области, подлежащей съемке и картографированию.
[0087] В случае применения технического решения, описанного выше, вспомогательные точки фотографируемой области, определенные с использованием отношения отображения между объединенным набором точек съемки и опорной точкой фотографируемой области, используют в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию, при установленной высоте полета, а множество фотографий для съемки и картографирования, соответствующих области, подлежащей съемке и картографированию, получают с использованием беспилотного летательного аппарата для съемки и картографирования на основании определенных точек выборки для съемки и картографирования, так что указанные фотографии соединяют с получением изображения для съемки и картографирования, которое соответствует области, подлежащей съемке и картографированию, таким образом, проблемы высокой стоимости и низкой эффективности съемки и картографирования, существующие в ранее использовавшихся способах аэросъемки на основе БПЛА, решены, обеспечено снижение затрат на съемку и картографирование, а также повышена эффективность съемки и картографирования.
Третий вариант осуществления
[0088] На ФИГ. 3 представлено схематическое изображение устройства для планирования точек выборки для съемки и картографирования в соответствии с третьим вариантом осуществления настоящего изобретения. Как показано на ФИГ. 3, указанное устройство содержит: модуль 310 для установления отношения отображения (модуль для установления отношений отображения), модуль 320 для определения вспомогательной точки фотографируемой области (модуль для определения вспомогательных точек фотографируемой области) и модуль 330 для определения точек выборки для съемки и картографирования,
причем модуль 310 для установления отношения отображения выполнен с возможностью получения опорной точки фотографируемой области, соответствующей области, подлежащей съемке и картографированию, а также установления отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области;
модуль 320 для определения вспомогательной точки фотографируемой области выполнен с возможностью определения множества вспомогательных точек фотографируемой области, соответствующих опорной точке фотографируемой области, на основании отношения отображения и заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки;
модуль 330 для определения точек выборки для съемки и картографирования выполнен с возможностью использования опорной точки фотографируемой области и множества вспомогательных точек фотографируемой области в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию.
[0089] В варианте осуществления настоящего изобретения получают опорную точку фотографируемой области, соответствующую области, подлежащей съемке и картографированию, устанавливают отношение отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области, и, одновременно, определяют множество вспомогательных точек фотографируемой области, соответствующих опорной точке фотографируемой области, на основании указанного отношения отображения и заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки, а затем опорную точку фотографируемой области и множество вспомогательных точек фотографируемой области используют в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию. Таким образом, предложен новый способ планирования точек выборки для съемки и картографирования, а ранее использовавшийся режим мобильного планирования на основе параллельных линий заменен на общее планирование множества точек съемки и картографирования на основе объединенного набора точек съемки, таким образом проблемы высокой стоимости и низкой эффективности съемки и картографирования, существующие в ранее использовавшихся способах аэросъемки на основе БПЛА, решены, и достигнуты технические эффекты снижения затрат на съемку и картографирование, а также повышение эффективности съемки и картографирования.
[0090] В некоторых случаях точки съемки в объединенном наборе точек съемки включают: центральную точку съемки и четыре периферийные точки съемки, причем периферийные точки съемки представляют собой четыре вершины прямоугольника с центром в центральной точке съемки; причем комбинированная фотография, полученная на основании съемки во всех указанных точках съемки из объединенного набора точек съемки, имеет прямоугольную форму.
[0091] В некоторых случаях модуль 310 для установления отношения отображения выполнен с возможностью обнаружения операции касания, выполненной пользователем в интерфейсе человеко-компьютерного взаимодействия , и определения точки местоположения на экране на основании указанной операции касания; а также получения из картографических данных об области, подлежащей съемке и картографированию, отображаемой в настоящий момент в интерфейсе человеко-компьютерного взаимодействия, координаты географического местоположения, соответствующей точке местоположения на экране, в качестве опорной точки фотографируемой области.
[0092] В некоторых случаях модуль 310 для установления отношения отображения выполнен с возможностью определения точки, которой коснулся пользователь, в качестве точки местоположения на экране, если обнаружено, что операция касания, выполненная пользователем, представляет собой операцию одноточечного касания;
выбор точки из линейного сегмента, созданного при осуществлении операции касания, выполненной пользователем, в качестве точки местоположения на экране, если обнаружено, что операция касания, выполненная пользователем, представляет собой операцию касания со скольжением по экрану; и
выбор точки в пределах поля, созданного при осуществлении операции касания, выполненной пользователем, в качестве точки местоположения на экране, если обнаружено, что операция касания, выполненная пользователем, представляет собой операцию касания путем рисования поля.
[0093] В некоторых случаях модуль 310 для установления отношения отображения выполнен с возможностью получения центральной точки области, подлежащей съемке и картографированию, в качестве опорной точки фотографируемой области.
[0094] В некоторых случаях модуль 310 для установления отношения отображения выполнен с возможностью отправки информации с запросом местоположения на беспилотный летательный аппарат для съемки и картографирования и использования координаты географического местоположения, возвращенной беспилотным летательным аппаратом для съемки и картографирования, в качестве опорной точки фотографируемой области; причем беспилотный летательный аппарат для съемки и картографирования предварительно размещают в местоположении, соответствующем области, подлежащей съемке и картографированию.
[0095] В некоторых случаях модуль 310 для установления отношения отображения выполнен с возможностью получения координаты географического местоположения, введенной пользователем, в качестве опорной точки фотографируемой области.
[0096] В некоторых случаях модуль 310 для установления отношения отображения выполнен с возможностью установления отношения картографирования между одной точкой съемки, выбранной пользователем из объединенного набора точек съемки, и опорной точкой фотографируемой области.
[0097] В некоторых случаях модуль 310 для установления отношения отображения выполнен с возможностью установления отношения отображения между центральной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области.
[0098] В некоторых случаях модуль 310 для установления отношения отображения выполнен с возможностью вычисления расстояния между опорной точкой фотографируемой области и каждой из основных точек позиционирования в области, подлежащей съемке и картографированию, причем указанные основные точки позиционирования включают: угловые точки области, подлежащей съемке и картографированию, и центральную точку области, подлежащей съемке и картографированию; получения основной точки позиционирования, расположенной ближе всего к опорной точке фотографируемой области, в качестве целевой опорной точки; выбора, на основании информации о местоположении в целевой опорной точке в области, подлежащей съемке и картографированию, одной точки съемки, соответствующей информации о местоположении, из объединенного набора точек съемки, и установления отношения отображения между указанной точкой съемки и опорной точкой фотографируемой области.
[0099] В некоторых случаях указанное устройство также содержит: модуль для получения фотографируемой области, соответствующей одной фотографии, причем указанный модуль выполнен с возможностью получения параметра фотографирования устройства для фотографирования, установленного на беспилотном летательном аппарате для съемки и картографирования, причем указанный параметр фотографирования включает фотографируемую область, соответствующую одной фотографии, беспилотного летательного аппарата для съемки и картографирования на установленной высоте полета, и каждая точка съемки соответствует фотографируемой области, соответствующей одной фотографии; модуль для определения заданных относительных позиционных отношений, выполненный с возможностью определения заданных относительных позиционных отношений между каждыми двумя точками съемки в объединенном наборе точек съемки на основании заданного индекса степени перекрытия фотографий и фотографируемой области, соответствующей одной фотографии; и модуль для определения точек выборки для съемки и картографирования, выполненный с возможностью использования опорной точки фотографируемой области и множества вспомогательных точек фотографируемой области в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию, на высоте полета.
[00100] В некоторых случаях модуль для определения относительного позиционного отношения выполнен с возможностью определения размера одной фотографии на основании размера кадра устройства для фотографирования и пиксельной ширины устройства для фотографирования; построения двухмерной системы координат и выбора целевой точки в указанной двухмерной системе координат в качестве центральной точки съемки; создании центральной фотографии в двухмерной системе координат на основании центральной точки съемки и размера одной фотографии; создании в верхнем левом углу, нижнем левом углу, верхнем правом углу и нижнем правом углу центральной фотографии четырех соответствующих периферийных фотографий, которые соответствуют индексу степени перекрытия фотографий относительно центральной фотографии; определения на основании отношения отображения между размером одной фотографии и фотографируемой областью, соответствующей одной фотографии, значения координаты соответствующей периферийной точки съемки, соответствующей каждой периферийной фотографии в двухмерной системе координат; и определение заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки на основании значений координат центральной точки съемки и всех периферийных точек съемки в двухмерной системе координат.
[00101] В некоторых случаях указанное устройство также содержит модуль для вычисления установленной высоты полета, выполненный с возможностью вычисления установленной высоты полета на основании пиксельной ширины устройства для фотографирования, фокусного расстояния объектива устройства для фотографирования и пиксельного разрешения земной поверхности.
[00102] В некоторых случаях модуль для получения фотографируемой области, соответствующей одной фотографии, выполнен с возможностью вычисления, на основании пиксельной ширины устройства для фотографирования, размера кадра устройства для фотографирования и пиксельного разрешения земной поверхности, фотографируемой области, соответствующей одной фотографии, беспилотного летательного аппарата для съемки и картографирования на установленной высоте полета.
[00103] В некоторых случаях указанное устройство также содержит: модуль для отправки точек выборки для съемки и картографирования, выполненный с возможностью отправки каждой из точек выборки для съемки и картографирования на беспилотный летательный аппарат для съемки и картографирования таким образом, что беспилотный летательный аппарат для съемки и картографирования делает множество фотографий для съемки и картографирования, соответствующих области, подлежащей съемке и картографированию, когда он летит к каждой точке выборки для съемки и картографирования, соответствующей высоте полета; и все фотографии в множестве фотографий для съемки и картографирования выполнены с возможностью соединения в изображении для съемки и картографирования, которое соответствует области, подлежащей съемке и картографированию.
[00104] Указанное устройство для планирования точек выборки для съемки и картографирования, описанное выше, выполнено с возможностью выполнения способа планирования точек выборки для съемки и картографирования в соответствии с любым вариантом осуществления настоящего изобретения и имеет функциональные модули и полезные эффекты, соответствующие выполнению указанного способа. Что касается технических деталей, которые подробно не описаны в данном варианте осуществления, может быть сделана ссылка на способ планирования точек выборки для съемки и картографирования согласно любому варианту осуществления настоящего изобретения.
Четвертый вариант осуществления
[00105] На ФИГ. 4 представлена принципиальная схема конструкции терминала управления, выполненного с возможностью управления беспилотным летательным аппаратом в соответствии с четвертым вариантом осуществления настоящего изобретения. На ФИГ. 4 представлена блок-схема терминала 412 управления, пригодного для реализации вариантов осуществления настоящего изобретения. Терминал 412 управления, показанный на ФИГ. 4, представлен исключительно в качестве одного примера и не предназначен для ограничения каким-либо образом функций и применимого объема вариантов осуществления настоящего изобретения.
[00106] Как показано на ФИГ. 4, терминал 412 управления выполнен в виде вычислительного устройства общего назначения. Компоненты терминала 412 управления могут включать, без ограничений, один или более процессоров 416, устройство 428 для хранения данных и шину 418, которая соединяет различные компоненты системы (включая устройство 428 для хранения данных и один или более процессоров 416).
[00107] Шина 418 представляет собой шину, относящуюся к одному или более из нескольких типов конструкций шин, включая шину запоминающего устройства, контроллер запоминающего устройства, шину периферийных устройств, быстродействующий графический порт и локальную шину в процессоре, или конструкцию шины, выполненную с использованием любой из множества архитектур шины. Например, такие архитектуры включают, без ограничений, шину промышленной стандартной архитектуры (ISA), шину микроканальной архитектуры (MCA), усовершенствованную шину ISA, локальную шину ассоциации по стандартам в области видеоэлектроники (VESA) и шину для взаимодействия периферийных компонентов (PCI).
[00108] Терминал 412 управления как правило содержит множество считываемых вычислительной системой носителей. Такие носители могут представляют собой любые доступные носители, которые доступны для терминала 412 управления, включая как энергозависимые, так и энергонезависимые носители, съемные и несъемные носители.
[00109] Устройство 428 для хранения данных может включать считываемые вычислительной системой носители в виде энергозависимого запоминающего устройства, такого как оперативное запоминающее устройство (ОЗУ) 430 и/или быстродействующее буферное запоминающее устройство 432. Терминал 412 управления также может содержать другие съемные/несъемные, энергозависимые/энергонезависимые носители данных вычислительной системы. В качестве примера, может быть обеспечена система 434 для хранения данных для считывания и записи на несъемный, энергонезависимый магнитный носитель данных (не показан на ФИГ. 4, как правило упоминается как «накопитель на жестких магнитных дисках»). Хотя указанный носитель не показан на ФИГ. 4, может быть обеспечен накопитель на магнитных дисках для считывания и записи на съемный энергонезависимый магнитный диск (например, «гибкий диск») и накопитель на оптических дисках для считывания или записи на съемный энергонезависимый оптический диск, такой как компакт-диск для однократной записи данных (CD-ROM), цифровой видеодиск для однократной записи данных (DVD-ROM) или другие оптические носители. В таких случаях каждый накопитель может быть соединен с шиной 418 посредством одного или более интерфейсов носителя данных. Устройство 428 для хранения данных может включать по меньшей мере один программный продукт, содержащий набор (например, по меньшей мере один) программных модулей, которые выполнены с возможностью выполнения функций согласно каждому варианту осуществления настоящего изобретения.
[00110] Программа 436, содержащая набор (по меньшей мере один) программных модулей 426, может храниться, в качестве примера, на устройстве 428 для хранения данных, причем такие программные модули 426 включают, без ограничений, операционную систему, одну или более прикладных программ, другие программные модули и программные данные. Каждый или некоторая комбинация из указанных примеров может включать реализацию сетевой среды. Программные модули 426 как правило выполняют функции и/или способы согласно вариантам осуществления, описанным в настоящем раскрытии.
[00111] Терминал 412 управления также выполнен с возможностью обмена данными с одним или более внешними устройствами 414 (такими как клавиатура, указывающее устройство, камера, дисплей 424 и т.д.), а также выполнен с возможностью обмена данными с одним или более устройствами, которые позволяют пользователю взаимодействовать с терминалом 412 управления и/или любыми устройствами (например, сетевой картой, модемом и т.д.), которые позволяют терминалу 412 управления обмениваться данными с одним или более других вычислительных устройств. Такой обмен данными может происходить посредством интерфейса 422 ввода/вывода (I/O). Кроме того, терминал 412 управления выполнен с возможностью обмена данными с одной или более сетями (такими как локальная сеть (LAN), глобальная сеть (WAN) и/или сеть передачи данных общественного пользования (например, Интернет)) посредством сетевого адаптера 420. Как показано на фигуре, сетевой адаптер 420 обменивается данными с другими модулями терминала 412 управления посредством шины 418. Следует понимать, что хотя другие аппаратные и/или программные модули не показаны на данной фигуре, они могут быть использованы вместе с терминалом 412 управления и они включают, без ограничений: код микрокоманды, драйверы устройств, блоки обработки с избыточностью, внешние массивы дисковых накопителей, системы массивов независимых дисковых накопителей с избыточностью (RAID), ленточные накопители, системы архивного хранения данных и т.д.
[00112] Процессор 416 исполняет соответствующие функциональные приложения и обработку данных, например, реализует способ планирования точек выборки для съемки и картографирования в соответствии с вышеизложенными вариантами осуществления настоящего изобретения, путем запуска программы, хранимой в устройстве 428 для хранения данных.
[00113] Другими словами, при исполнении программы блок обработки осуществляет следующие операции: получение опорной точки фотографируемой области, соответствующей области, подлежащей съемке и картографированию, и установление отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области; определение множества вспомогательных точек фотографируемой области, соответствующих опорной точке фотографируемой области, на основании указанного отношения отображения и заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки; и использование опорной точки фотографируемой области и множества вспомогательных точек фотографируемой области в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию.
Пятый вариант осуществления
[00114] Согласно пятому варианту осуществления настоящего изобретения также обеспечен компьютерный носитель для хранения данных, хранящий компьютерную программу, которая при ее исполнении процессором компьютера обеспечивает выполнение способа планирования точек выборки для съемки и картографирования, описанного в любом из вышеупомянутых вариантов осуществления настоящего изобретения, включающего: получение опорной точки фотографируемой области, соответствующей области, подлежащей съемке и картографированию, и установление отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области; определение множества вспомогательных точек фотографируемой области, соответствующих опорной точке фотографируемой области, на основании указанного отношения отображения и заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки; и использование опорной точки фотографируемой области и множества вспомогательных точек фотографируемой области в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию.
[00115] Любая комбинация одного или более считываемых компьютером носителей может быть использована в качестве компьютерного носителя для хранения данных в соответствии с вариантом осуществления настоящего изобретения. Считываемый компьютером для хранения носитель может представлять собой считываемый компьютером сигнальный носитель или считываемый компьютером носитель данных. Считываемый компьютером для хранения носитель данных может представлять собой, например, без ограничений, электронную, магнитную, оптическую, электромагнитную, инфракрасную или полупроводниковую систему, аппарат или устройство, или любую комбинацию вышеперечисленного. Более конкретные примеры (неисчерпывающий список) считываемых компьютером носителей для хранения данных включают: электрическое соединение, содержащее один или более проводов, портативную дискету для компьютера, накопитель на жестких дисках, ОЗУ, постоянное запоминающее устройство (ROM), стираемое программируемое постоянное запоминающее устройство (СППЗУ или флэш-ПЗУ), оптоволоконный кабель, портативный компакт-диск для однократной записи данных (CD-ROM), оптическое устройство для хранения данных, магнитное устройство для хранения данных или любую подходящую комбинацию вышеперечисленного. В контексте данного документа считываемый компьютером носитель для хранения данных может представлять собой любой материальный носитель, который может содержать или хранить программу, а программа может быть использована системой, аппаратом или устройством для выполнения команд или же в сочетании с ними.
[00116] Считываемый компьютером сигнальный носитель может включать сигнал данных, несущий в себе считываемые компьютером программные коды, распространяемый с помощью сигнала в основной полосе частот или на участке несущей волны. Такой распространяемый сигнал данных может иметь любую из множества форм, включая, без ограничений, электромагнитный сигнал, оптический сигнал или любую подходящую их комбинацию. Считываемый компьютером сигнальный носитель может представлять собой любой считываемый компьютером носитель, отличный от считываемого компьютером носителя для хранения данных, который выполнен с возможностью передачи, распространения или транспортировки программы для использования системой, аппаратом или устройством для выполнения команд или же в сочетании с ними.
[00117] Программный код, реализованный на считываемом компьютером носителе, может быть передан с использованием любой подходящей среды, включая, без ограничений, беспроводную, проводную среды, оптоволоконный кабель, радиочастоту (РЧ) или т.п., или же любую подходящую комбинацию вышеизложенного.
[00118] Код компьютерной программы для выполнения операций согласно настоящему раскрытию может быть написан на одном или более языках программирования или любой их комбинации, включая объектно-ориентированный язык программирования, такой как Java, Smalltalk, C++ или т.п., и обычные процедурные языки программирования, такие как язык программирования «C» или аналогичные языки программирования. Программный код может полностью выполняться на компьютере пользователя, частично выполняться на компьютере пользователя, выполняться в виде отдельного программного пакета, частично выполняться на компьютере пользователя и частично на удаленном компьютере или же полностью выполняться на удаленном компьютере или удаленном сервере. В сценарии с удаленным компьютером указанный удаленный компьютер может обмениваться данными с компьютером пользователя посредством сети любого типа, включая локальную сеть (LAN) или глобальную сеть (WAN), или может обмениваться данными с внешним компьютером (например, посредством сети Интернет с помощью поставщика услуг Интернета).
Промышленная применимость
В вариантах осуществления настоящего изобретения ранее использовавшийся режим мобильного планирования на основе параллельных линий заменен на общее планирование множества точек съемки и картографирования на основе объединенного набора точек съемки, так что проблемы высокой стоимости и низкой эффективности съемки и картографирования, существующие в ранее использовавшихся способах аэросъемки на основе БПЛА, решены, снижены затраты на осуществление съемки и картографирования, а также повышена эффективность осуществления съемки и картографирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения элементов внешнего ориентирования снимка по изображениям летательных аппаратов | 2022 |
|
RU2789986C1 |
| Способ определения координат объекта по стереопаре его снимков и по снимку летательных аппаратов | 2024 |
|
RU2840058C1 |
| Способ определения координат точек местности | 2024 |
|
RU2831494C1 |
| БЕСПИЛОТНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2011 |
|
RU2583851C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАПАСОВ СТВОЛОВОЙ ДРЕВЕСИНЫ С ИСПОЛЬЗОВАНИЕМ ДАННЫХ ВОЗДУШНОЙ БЕСПИЛОТНОЙ СЪЕМКИ | 2021 |
|
RU2773144C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| Способ мониторинга технического состояния объектов транспорта газа на основе геоинформационной системы | 2021 |
|
RU2780304C1 |
| АВТОНОМНАЯ ОПТИЧЕСКАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ И НАВИГАЦИИ | 2023 |
|
RU2816087C1 |
| ГЕОПОЗИЦИОННАЯ МИШЕНЬ | 2019 |
|
RU2712645C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО СОЗДАНИЯ ТРЕХМЕРНЫХ СИСТЕМ ГОРОДСКИХ ПАНОРАМ НА ОСНОВЕ ДАННЫХ ЛАЗЕРНОГО СКАНИРОВАНИЯ | 2015 |
|
RU2601165C2 |
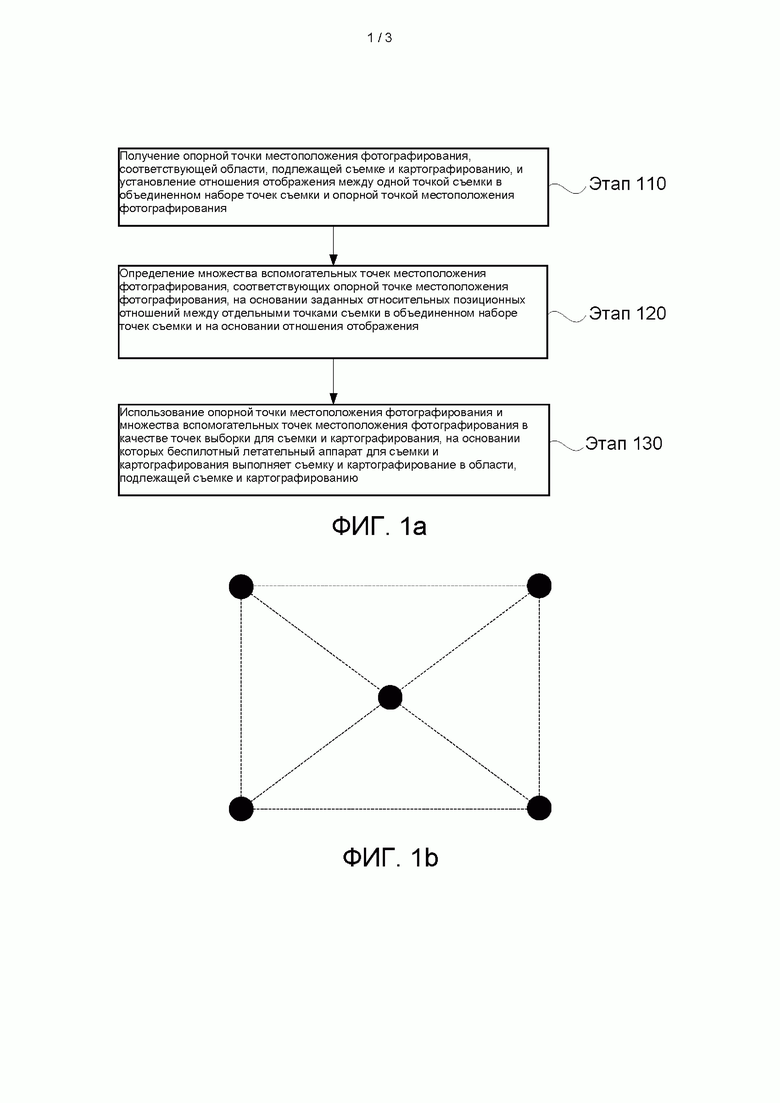
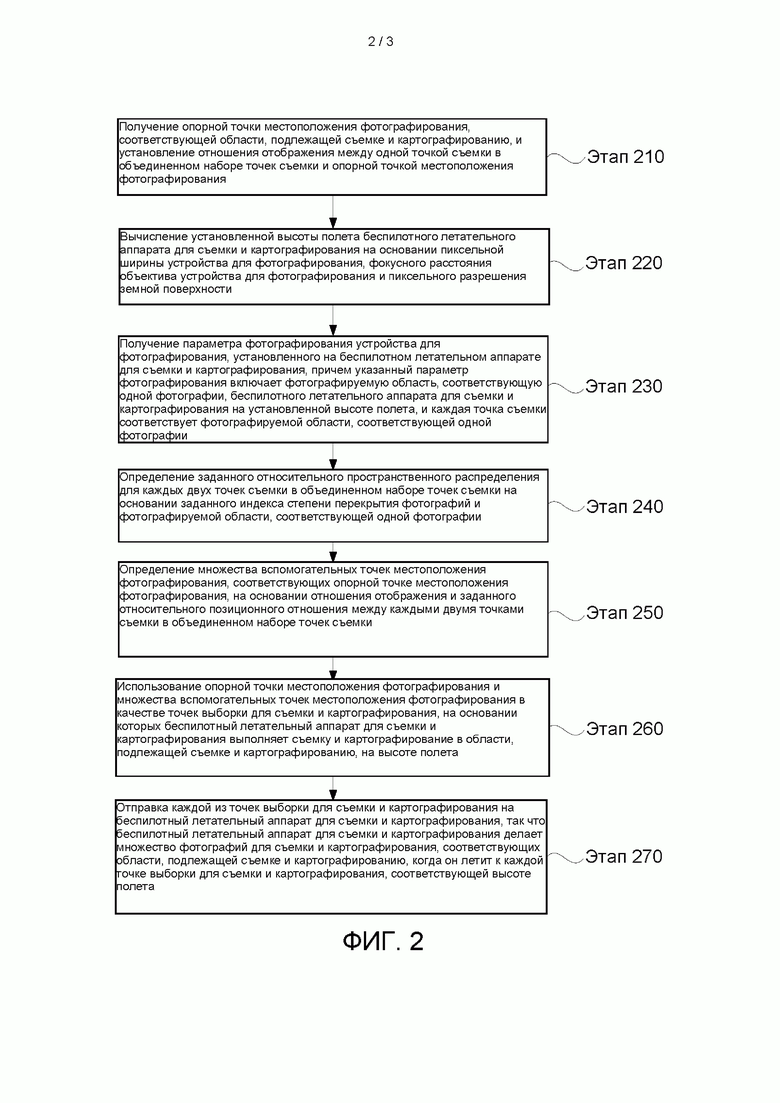
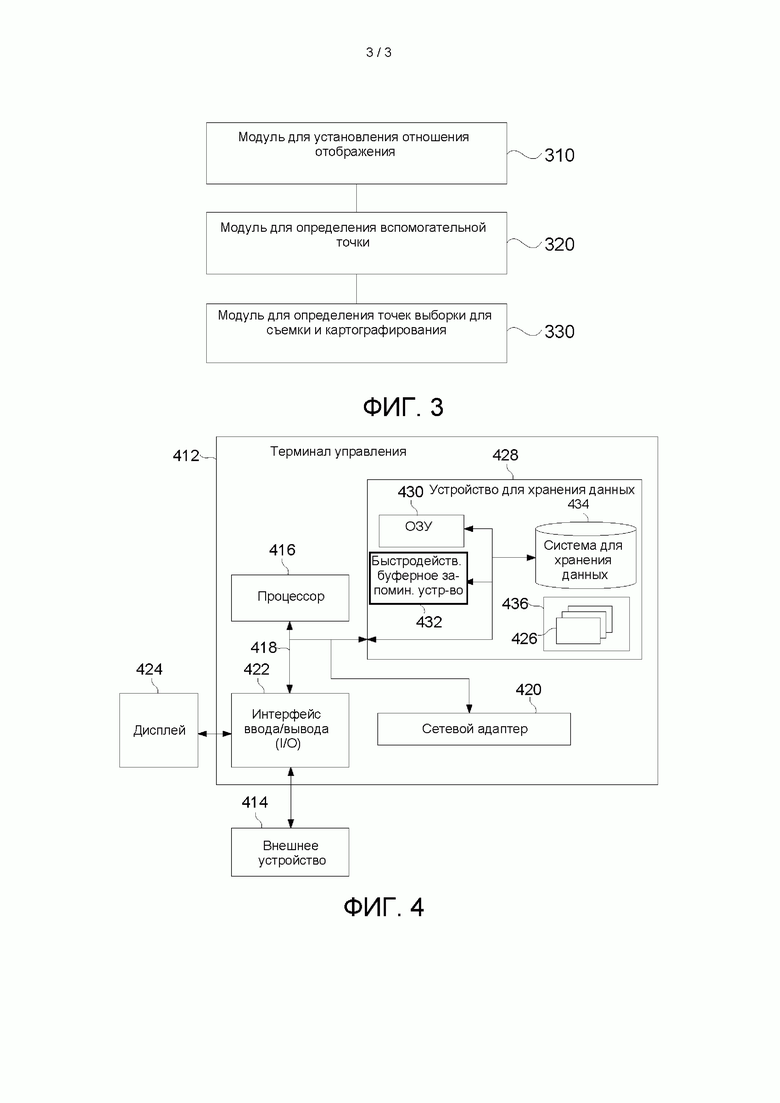
Группа изобретений относится к способу и устройству планирования точек выборки для съемки и картографирования, терминалу управления и компьютерному носителю для хранения данных. Для планирования точек выборки получают опорную точку фотографируемой области и устанавливают отношение отображения между точкой съемки и опорной точкой, определяют множество вспомогательных точек определенным образом, производят съемку и картографирование. Устройство содержит модули, выполненные с возможностью выполнения этапов способа. Терминал управления, выполненный с возможностью управления беспилотным летательным аппаратом, содержит один или более процессоров, устройство для хранения данных. Обеспечивается повышение быстроты и эффективности съемки и картографирования. 4 н. и 14 з.п. ф-лы, 4 ил.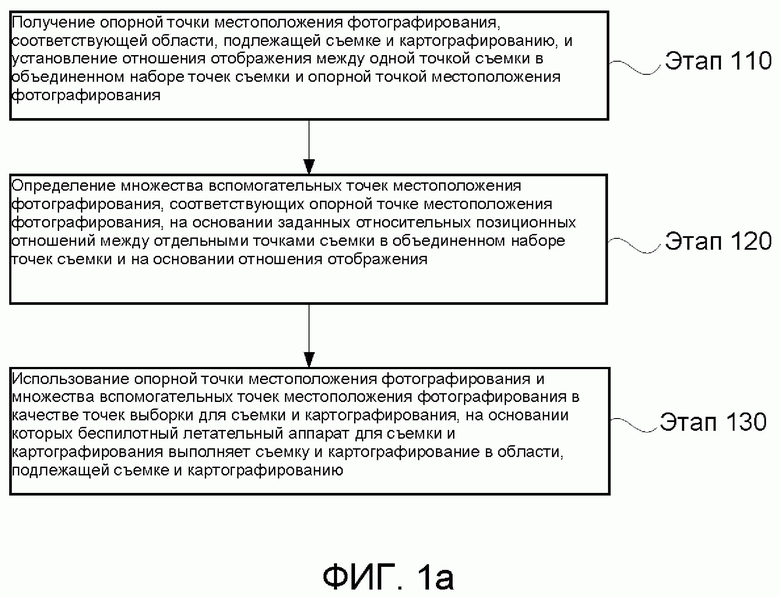
1. Способ планирования точек выборки для съемки и картографирования, отличающийся тем, что он включает этапы:
получения опорной точки фотографируемой области, соответствующей области, подлежащей съемке и картографированию, и установление отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области;
определения множества вспомогательных точек фотографируемой области, соответствующих опорной точке фотографируемой области, на основании отношения отображения и заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки; и
использования опорной точки фотографируемой области и множества вспомогательных точек фотографируемой области в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию.
2. Способ по п. 1, согласно которому точки съемки в объединенном наборе точек съемки включают: центральную точку съемки и четыре периферийные точки съемки, причем периферийные точки съемки представляют собой соответственно четыре вершины прямоугольника с центром в центральной точке съемки;
причем комбинированная фотография, полученная на основании съемки во всех указанных точках съемки из объединенного набора точек съемки, имеет прямоугольную форму.
3. Способ по п. 1 или 2, согласно которому получение опорной точки фотографируемой области, соответствующей области, подлежащей съемке и картографированию, включает:
обнаружение операции касания, выполненной пользователем в интерфейсе человеко-компьютерного взаимодействия, и определение точки местоположения на экране на основании указанной операции касания; и
получение из картографических данных об области, подлежащей съемке и картографированию, отображаемой в настоящий момент в интерфейсе человеко-компьютерного взаимодействия, координаты географического местоположения, соответствующей точке местоположения на экране, и использование указанной координаты географического местоположения в качестве опорной точки фотографируемой области.
4. Способ по п. 3, согласно которому обнаружение операции касания, выполненной пользователем в интерфейсе человеко-компьютерного взаимодействия, и определение точки местоположения на экране на основании указанной операции касания, включает по меньшей мере одно из следующего:
определение точки, которой коснулся пользователь, в качестве точки местоположения на экране, если обнаружено, что операция касания, выполненная пользователем, представляет собой операцию одноточечного касания;
выбор точки из линейного сегмента, созданного при операции касания, выполненной пользователем, в качестве точки местоположения на экране, если обнаружено, что операция касания, выполненная пользователем, представляет собой операцию касания со скольжением по экрану; и
выбор точки в пределах поля, созданного при операции касания, выполненной пользователем, в качестве точки местоположения на экране, если обнаружено, что операция касания, выполненная пользователем, представляет собой операцию касания путем рисования поля.
5. Способ по п. 1 или 2, согласно которому получение опорной точки фотографируемой области, соответствующей области, подлежащей съемке и картографированию, включает:
получение центральной точки области, подлежащей съемке и картографированию, и использование центральной точки в качестве опорной точки фотографируемой области.
6. Способ по п. 1 или 2, согласно которому получение опорной точки фотографируемой области, соответствующей области, подлежащей съемке и картографированию, включает:
отправку информации с запросом местоположения на беспилотный летательный аппарат для съемки и картографирования и использование координаты географического местоположения, возвращенной беспилотным летательным аппаратом для съемки и картографирования, в качестве опорной точки фотографируемой области,
причем беспилотный летательный аппарат для съемки и картографирования предварительно размещают в местоположении, соответствующем области, подлежащей съемке и картографированию.
7. Способ по п. 1 или 2, согласно которому получение опорной точки фотографируемой области, соответствующей области, подлежащей съемке и картографированию, включает:
получение координаты географического местоположения, введенной пользователем, и использование указанной координаты географического местоположения в качестве опорной точки фотографируемой области.
8. Способ по п. 1 или 2, согласно которому установление отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области включает:
установление отношения отображения между опорной точкой фотографируемой области и точкой съемки, выбранной пользователем из объединенного набора точек съемки.
9. Способ по п. 2, согласно которому установление отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области включает:
установление отношения отображения между центральной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области.
10. Способ по п. 2, согласно которому установление отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области включает:
вычисление расстояния между опорной точкой фотографируемой области и каждой из основных точек позиционирования в области, подлежащей съемке и картографированию, причем указанные основные точки позиционирования включают: угловые точки области, подлежащей съемке и картографированию, и центральную точку области, подлежащей съемке и картографированию;
получение основной точки позиционирования, расположенной ближе всего к опорной точке фотографируемой области и использование основной точки позиционирования в качестве целевой опорной точки; и
выбор, на основании информации о местоположении в целевой опорной точке в области, подлежащей съемке и картографированию, одной точки съемки, соответствующей информации о местоположении, из объединенного набора точек съемки, и установление отношения отображения между указанной точкой съемки и опорной точкой фотографируемой области.
11. Способ по п. 2, согласно которому перед определением множества вспомогательных точек фотографируемой области, соответствующих опорной точке фотографируемой области, на основании отношения отображения и заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки указанный способ также включает:
получение параметра фотографирования устройства для фотографирования, установленного на беспилотном летательном аппарате для съемки и картографирования, причем указанный параметр фотографирования включает фотографируемую область, соответствующую одной фотографии, беспилотного летательного аппарата для съемки и картографирования на установленной высоте полета, и каждая точка съемки соответствует фотографируемой области, соответствующей одной фотографии; и
определение заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки на основании заданного индекса степени перекрытия фотографий и фотографируемой области, соответствующей одной фотографии;
причем использование опорной точки фотографируемой области и множества вспомогательных точек фотографируемой области в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию, включает:
использование опорной точки фотографируемой области и множества вспомогательных точек фотографируемой области в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию, на установленной высоте полета.
12. Способ по п. 11, согласно которому определение заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки на основании заданного индекса степени перекрытия фотографий и фотографируемой области, соответствующей одной фотографии, включает:
определение размера одной фотографии на основании размера кадра устройства для фотографирования и пиксельной ширины устройства для фотографирования;
построение двухмерной системы координат и выбор целевой точки в двухмерной системе координат в качестве центральной точки съемки;
создание центральной фотографии в двухмерной системе координат на основании центральной точки съемки и размера одной фотографии;
создание в верхнем левом углу, нижнем левом углу, верхнем правом углу и нижнем правом углу центральной фотографии четырех соответствующих периферийных фотографий, для которых обеспечен индекс степени перекрытия фотографий относительно центральной фотографии;
определение, на основании отношения отображения между размером одной фотографии и фотографируемой областью, соответствующей одной фотографии, значения координаты соответствующей периферийной точки съемки, которая соответствует каждой периферийной фотографии в двухмерной системе координат; и
определение заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки на основании значений координат центральной точки съемки и всех периферийных точек съемки в двухмерной системе координат.
13. Способ по п. 11, согласно которому перед получением параметра фотографирования устройства для фотографирования, установленного на беспилотном летательном аппарате для съемки и картографирования, указанный способ также включает:
вычисление установленной высоты полета на основании пиксельной ширины устройства для фотографирования, фокусного расстояния объектива устройства для фотографирования и пиксельного разрешения земной поверхности.
14. Способ по п. 11, согласно которому получение параметра фотографирования устройства для фотографирования, установленного на беспилотном летательном аппарате для съемки и картографирования, включает:
вычисление, на основании пиксельной ширины устройства для фотографирования, размера кадра устройства для фотографирования и пиксельное разрешение земной поверхности, фотографируемой области, соответствующей одной фотографии, беспилотного летательного аппарата для съемки и картографирования на установленной высоте полета.
15. Способ по п. 11, согласно которому после использования опорной точки фотографируемой области и множества вспомогательных точек фотографируемой области в качестве точек выборки для съемки и картографирования, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию, указанный способ также включает:
отправку каждой из точек выборки для съемки и картографирования на беспилотный летательный аппарат для съемки и картографирования, так что беспилотный летательный аппарат для съемки и картографирования делает множество фотографий для съемки и картографирования, соответствующих области, подлежащей съемке и картографированию, когда он летит к каждой точке выборки для съемки и картографирования, соответствующей установленной высоте полета,
причем все фотографии в множестве фотографий для съемки и картографирования выполнены с возможностью соединения с получением изображения для съемки и картографирования, которое соответствует области, подлежащей съемке и картографированию.
16. Устройство для планирования точек выборки для съемки и картографирования, отличающееся тем, что оно содержит:
модуль для установления отношения отображения, выполненный с возможностью получения опорной точки фотографируемой области, соответствующей области, подлежащей съемке и картографированию, а также установления отношения отображения между одной точкой съемки в объединенном наборе точек съемки и опорной точкой фотографируемой области;
модуль для определения вспомогательной точки фотографируемой области, выполненный с возможностью определения множества вспомогательных точек фотографируемой области, соответствующих опорной точке фотографируемой области, на основании отношения отображения и заданного относительного пространственного распределения для каждых двух точек съемки в объединенном наборе точек съемки; и
модуль для определения точек выборки для съемки и картографирования, выполненный с возможностью использования опорной точки фотографируемой области и множества вспомогательных точек фотографируемой области в качестве точек выборки для съемки и отображения, на основании которых беспилотный летательный аппарат для съемки и картографирования выполняет съемку и картографирование в области, подлежащей съемке и картографированию.
17. Терминал управления, выполненный с возможностью управления беспилотным летательным аппаратом, отличающийся тем, что он содержит:
один или более процессоров;
устройство для хранения данных, выполненное с возможностью хранения одной или более программ,
причем одна или более программ выполнены с возможностью при их исполнении одним или более процессорами вызывать осуществление указанными процессорами способа планирования точек выборки для съемки и картографирования по любому из пп. 1-15.
18. Компьютерный носитель для хранения данных, на котором хранится компьютерная программа, отличающийся тем, что способ планирования точек выборки для съемки и картографирования по любому из пп. 1-15 осуществляется при исполнении процессором указанной программы.
| СИСТЕМЫ И СПОСОБЫ ЗАХВАТА ИЗОБРАЖЕНИЙ БОЛЬШОЙ ПЛОЩАДИ ПО ЧАСТЯМ, ВКЛЮЧАЮЩИЕ В СЕБЯ КАСКАДНЫЕ КАМЕРЫ И/ИЛИ КАЛИБРОВОЧНЫЕ ПРИЗНАКИ | 2010 |
|
RU2562707C2 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗА ЗЕМНОЙ ПОВЕРХНОСТЬЮ С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2323851C1 |
| RU 2015107561 A, 27.09.2016 | |||
| US 20160202695 A1, 14.07.2016 | |||
| US 20160116280 A1, 28.04.2016. | |||

