Область техники, к которой относится изобретение
Настоящее раскрытие, в общем, относится к области технологии фотографирования изображения и, в частности, к способу и устройству для фотографирования изображения.
Уровень техники
В последнее время электронные устройства с функцией фотографирования изображения, такие как мобильный телефон, фотоаппарат и интеллектуальные очки, стали одними из основных электронных изделий для путешествий.
Когда пользователь хочет сфотографировать самого себя под некоторым углом, он может навести камеру электронного изделия на себя и затем выполнить фотографирование. Однако, так как пользователь не может позировать наиболее подходяще в момент фотографирования, он обычно должен сделать несколько попыток, прежде чем получить наиболее удовлетворительную фотографию.
Раскрытие изобретения
В раскрытии выполнены способ и устройство для фотографирования изображения. Технические решения раскрыты следующим образом.
Согласно первому аспекту настоящего раскрытия выполнен способ фотографирования изображения, содержащий этапы, на которых: получают заданную позу для фотографирования; обнаруживают, совпадает ли поза целевого объекта на изображении вида с заданной позой для фотографирования; если поза целевого объекта совпадает с заданной позой для фотографирования, осуществляют автоматическое фотографирование изображения, содержащего целевой объект.
В качестве альтернативы, этап получения заданной позы для фотографирования содержит подэтапы, на которых: принимают сигнал установки позы, где установленная поза с помощью сигнала установки позы выбирается в качестве заданной позы для фотографирования; или получают заданную позу для фотографирования из интеллектуального терминала, причем заданная поза для фотографирования представляет собой заданную в интеллектуальном терминале позу.
В качестве альтернативы, способ дополнительно содержит этап, на котором: определяют, расположено ли устройство фотографирования в горизонтальном положении согласно датчику силы тяжести; и выполняют операции автоматического фотографирования изображения, содержащего целевой объект.
В качестве альтернативы, способ дополнительно содержит этапы, на которых: обнаруживают, соответствует ли изображение вида заданным условиям, где заданные условия включают в себя: пропорцию целевого объекта на изображении вида, достигающую заданной пропорции, и/или зону, занятую целевым объектом на изображении вида, представляющем собой заданную зону; и выполняют операции автоматического фотографирования изображения, содержащего целевой объект.
В качестве альтернативы, автоматическое фотографирование изображения, содержащего целевой объект, содержит этапы, на которых: выдают информацию подсказки для фотографирования; после ожидания в течение заданного периода времени, осуществляют автоматическое фотографирование изображения, содержащего целевой объект.
В качестве альтернативы, способ дополнительно содержит этапы, на которых: выдают речевую подсказывающую информацию, если поза целевого объекта совпадает с заданной позой для фотографирования, где речевая подсказывающая информация используется для выдачи подсказки целевому объекту изменить позу.
Согласно второму аспекту вариантов осуществления настоящего раскрытия выполнено устройство фотографирования изображения, содержащее: модуль получения позы, выполненный с возможностью получения заданной позы для фотографирования; модуль обнаружения позы, выполненный с возможностью обнаружения того, совпадает ли поза целевого объекта на изображении вида с заданной позой для фотографирования, полученной модулем получения позы; и модуль фотографирования изображения, выполненный с возможностью автоматического фотографирования изображения, содержащего целевой объект, если поза целевого объекта совпадает с заданной позой для фотографирования.
В качестве альтернативы, модуль получения позы содержит: первый подмодуль получения, выполненный с возможностью приема сигнала установки позы, где установка позы с помощью сигнала установки позы выбирается в качестве заданной позы для фотографирования; или второй подмодуль получения, выполненный с возможностью получения заданной позы для фотографирования из интеллектуального терминала, причем заданная поза для фотографирования представляет собой заданную установку, в интеллектуальном терминале, позы.
В качестве альтернативы, устройство дополнительно содержит: модуль определения положения, выполненный с возможностью определения, расположено ли фотографическое устройство в горизонтальном положении согласно датчику силы тяжести; и модуль фотографирования изображения, выполненный с возможностью выполнения операции автоматического фотографирования изображения, содержащего целевой объект, когда модуль определения положения определяет, что фотографическое устройство расположено в горизонтальном положении.
В качестве альтернативы, устройство дополнительно содержит: модуль обнаружения изображения, выполненный с возможностью обнаружения, соответствует ли изображение вида заданным условиям, при этом заданные условия включают в себя: пропорцию целевого объекта на изображении вида, достигающую заданной пропорции, и/или зону, занятую целевым объектом на изображении вида, представляющем собой заданную зону; и модуль фотографирования изображения, выполненный с возможностью выполнения операции автоматического фотографирования изображения, содержащего целевой объект, если модуль обнаружения изображения обнаруживает изображение вида, соответствующего заданным условиям.
В качестве альтернативы, модуль фотографирования изображения содержит: подмодуль выдачи информации, выполненный с возможностью выдачи подсказывающей информации для фотографирования; и подмодуль фотографирования изображения, выполненный с возможностью автоматического фотографирования изображения, содержащего целевой объект после ожидания в течение заданного периода времени.
В качестве альтернативы, устройство дополнительно содержит: модуль выдачи подсказывающей информации, выполненный с возможностью выдачи речевой подсказывающей информации, если поза целевого объекта не совпадает с заданной позой для фотографирования, где речевая подсказывающая информация используется для выдачи подсказки целевому объекту изменить позу.
Согласно третьему аспекту вариантов осуществления настоящего раскрытия выполнено устройство фотографирования изображения, содержащее: процессор; память для хранения инструкций, исполняемых процессором; где процессор выполнен с возможностью получения заданной позы для фотографирования; обнаружения того, совпадает ли поза целевого объекта на изображении вида с заданной позой для фотографирования; если поза целевого объекта совпадает с заданной позой для фотографирования, автоматическое фотографирование изображения, содержащего целевой объект.
Варианты осуществления раскрытия позволяют обеспечить по меньшей мере некоторые из следующих полезных эффектов: путем получения заданной позы для фотографирования можно автоматически сфотографировать изображение, содержащее целевой объект, если поза целевого объекта на изображении вида совпадает с заданной позой для фотографирования, что решает проблему предшествующего уровня техники, связанную с тем, что пользователь должен сделать несколько попыток, прежде чем получить удовлетворительное изображение, таким образом достигая эффектов, связанных с тем, что фотографическое устройство может автоматически фотографировать, когда поза целевого объекта совпадает с заданной позой для фотографирования, и тем самым уменьшается сложность пользовательских операций.
Краткое описание чертежей
Сопроводительные чертежи, которые включены в и образуют часть данного описания, иллюстрируют варианты осуществления в соответствии с изобретением и вместе с описанием служат для объяснения принципов изобретения.
На фиг. 1 показана схема, иллюстрирующая окружающую среду, существующую на практике, которая относится к способу фотографирования изображения согласно некоторым примерным вариантам осуществления.
На фиг. 2 показана блок-схема последовательности операций, иллюстрирующая способ фотографирования изображения согласно примерному варианту осуществления.
На фиг. 3A показана блок-схема последовательности операций, иллюстрирующая способ фотографирования изображения согласно другому примерному варианту осуществления.
На фиг. 3B показана схема, иллюстрирующая изображение вида, полученное фотографическим устройством согласно другому примерному варианту осуществления.
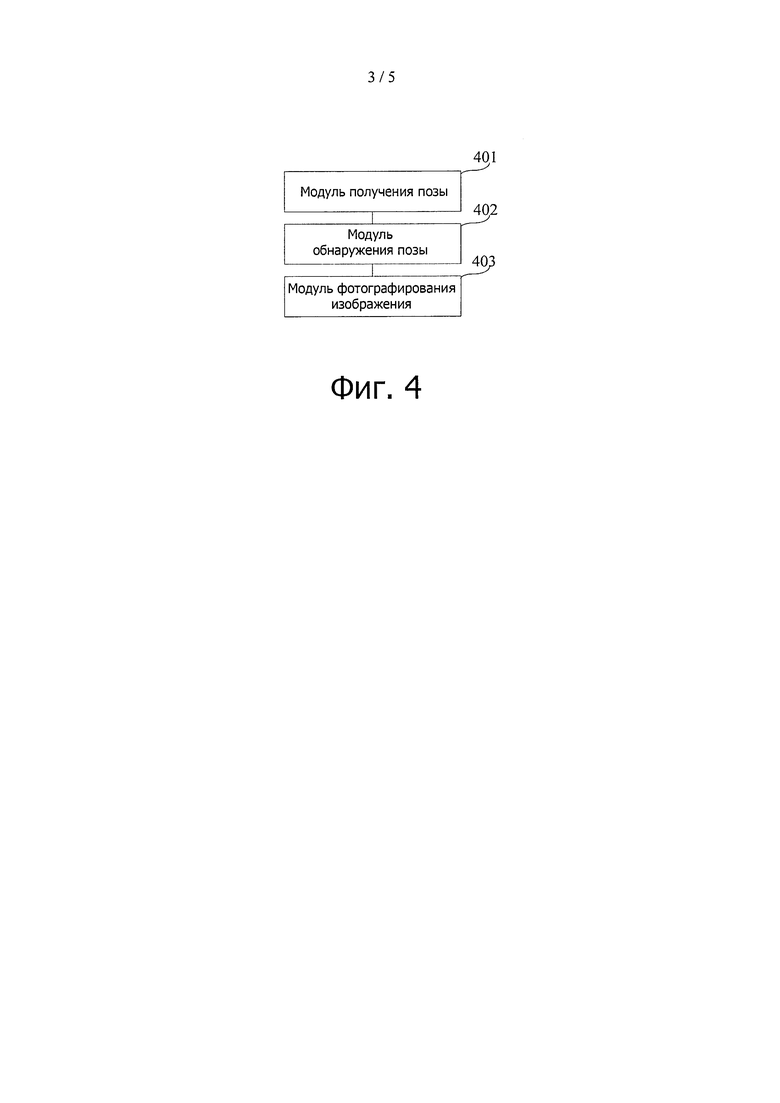
На фиг. 4 показана блок-схема, иллюстрирующая устройство фотографирования изображения согласно примерному варианту осуществления.
На фиг. 5 показана блок-схема, иллюстрирующая устройство фотографирования изображения согласно другому примерному варианту осуществления.
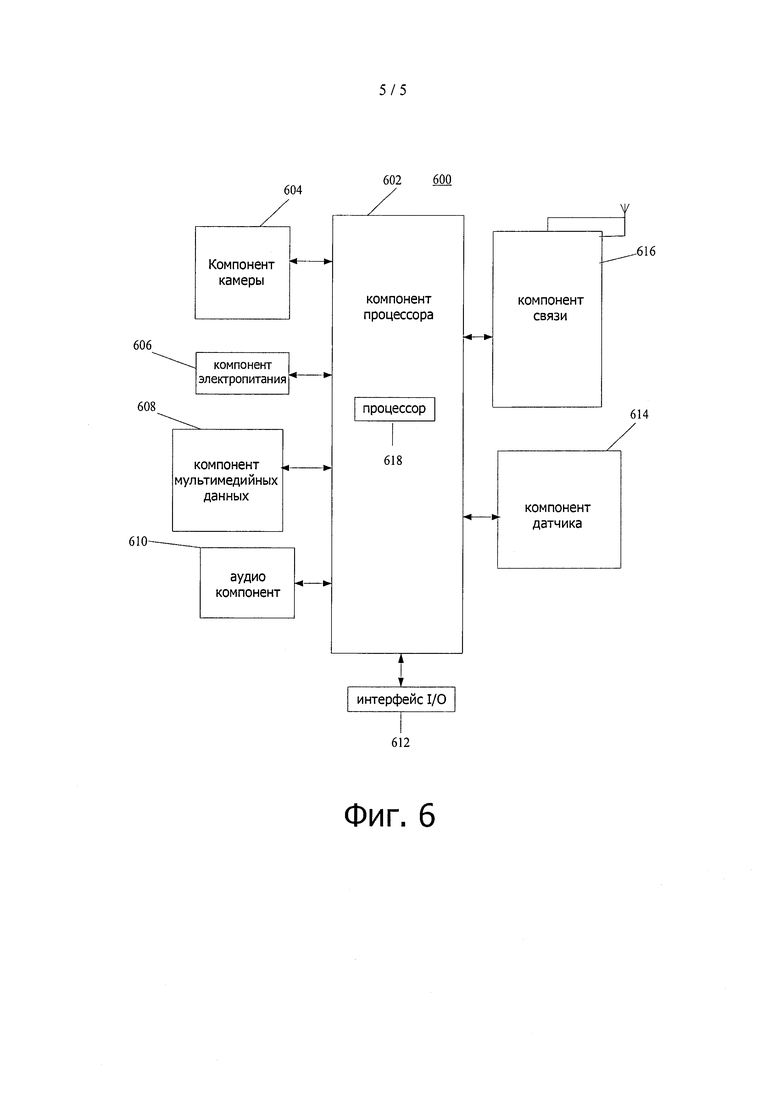
На фиг. 6 показана блок-схема, иллюстрирующая устройство фотографирования изображения согласно примерному варианту осуществления.
Осуществление изобретения
Теперь будет сделана подробная ссылка на примерные варианты осуществления, примеры которых проиллюстрированы на сопроводительных чертежах. Последующее описание опирается на сопроводительные чертежи, на которых одинаковые ссылочные позиции на различных чертежах представляют собой одинаковые или аналогичные элементы, если не указано иное. Реализации, изложенные в последующем описании примерных вариантов осуществления, не представляют собой все реализации, соответствующие настоящему изобретению. Вместо этого они являются только примерами устройств и способов, соответствующих аспектам, которые относятся к изобретению, как изложено в прилагаемой формуле изобретения.
На фиг. 1 показана схема среды реализации, которая относится к способу, выполненному в некоторых примерных вариантах осуществления настоящего раскрытия. Как показано на фиг. 2, окружающая среда реализации может включать в себя фотографическое устройство 110 и интеллектуальный терминал 120.
Фотографическое устройство 110 может представлять собой устройство с функцией фотографирования. Фотографическое устройство 110 может представлять собой мобильный телефон, компьютер, в том числе видеокамеру, цифровой фотоаппарат или камеру для съемки подвижного изображения и т.д. Фотографическое устройство 110 можно подсоединить к интеллектуальному терминалу 120 через проводную или беспроводную сеть.
Интеллектуальный терминал 120 может быть таким терминалом, как мобильный телефон, планшетный компьютер или электронная книга.
На фиг. 2 показана блок-схема последовательности операций, иллюстрирующая способ фотографирования изображения согласно примерному варианту осуществления. Как иллюстрировано на фиг. 2, способ фотографирования изображения может включать в себя следующие этапы.
На этапе 201 получают заданную позу для фотографирования.
На этапе 202 обнаруживают, совпадает ли поза целевого объекта на изображении вида с заданной позой для фотографирования.
На этапе 203 поза целевого объекта фотографируется автоматически, если поза целевого объекта совпадает с заданной позой для фотографирования.
Таким образом, за счет получения заданной позы для фотографирования с целью автоматического фотографирования изображения, содержащего целевой объект, если поза целевого объекта на изображении вида совпадает с заданной позой для фотографирования, при этом способ фотографирования изображения, выполненный в варианте осуществления раскрытия, позволяет достичь следующих эффектов: фотографическое устройство может автоматически фотографировать тогда, когда поза целевого объекта совпадает с заданной позой для фотографирования, и, таким образом, уменьшается сложность пользовательских операций. Между тем, за счет автоматического фотографирования изображения, содержащего целевой объект, способ позволяет избежать проблемы, связанной с тем, что наличие кнопки спуска может оказывать негативное влияние на пользователя, когда он фотографируется в ручном режиме.
На фиг. 3A показана блок-схема последовательности операций, иллюстрирующая способ фотографирования изображения согласно примерному варианту осуществления. Как иллюстрировано на фиг. 3A, способ фотографирования изображения включают в себя следующее этапы.
На этапе 301 получают заданную позу для фотографирования.
Этот этап включает в себя следующее две возможные реализации.
В первой реализации принимается сигнал установки позы, где установленная поза с помощью сигнала установки позы выбирается в качестве заданной позы для фотографирования.
Пользователь может установить позу для фотографирования в фотографическом устройстве. Соответственно, фотографическое устройство может принимать сигнал установки позы для пользователя, устанавливающего позу для фотографирования, и принять позу, установленную с помощью сигнала установки позы в качестве заданной позы для фотографирования.
Альтернативно, в качестве возможной реализации, фотографическое устройство может отображать интерфейс установки позы, включающий в себя 3D модель фигуры человека. Фотографическое устройство принимает сигнал установки для установки позы 3D модели фигуры человека, наложенной пользователем, и определения позы, установленной с помощью сигнала установки, в качестве заданной позы для фотографирования. Пользователь может изменить позу 3D модели фигуры человека путем скольжения сверху вниз или слева направо, то есть фотографическое устройство может изменить позу 3D модели фигуры человека согласно принятому сигналу скольжения сверху вниз или слева направо.
Например, в том случае, если фотографическое устройство является мобильным телефоном, когда пользователь хочет сделать фотографию правой стороны своего тела, можно применить сигнал скольжения вправо на 3D модели фигуры человека, отображаемой на его мобильном телефоне. После приема сигнала скольжения мобильный телефон поворачивает 3D модель фигуры человека вправо. При вращении 3D модели фигуры человека под подходящим углом, пользователь может остановить скольжение и коснуться опции подтверждения на интерфейсе установки позы. После приема сигнала касания текущая поза 3D модели фигуры человека определяется в качестве заданной позы для фотографирования.
В качестве альтернативы, множество поз-кандидатов для фотографирования можно предварительно сохранить в фотографическом устройстве, например, предварительно сохранить множество изображений фигуры, включающей в себя различные позы. Сначала принимается сигнал выбора, который предназначен для выбора одной из поз-кандидатов для фотографирования, и затем поза, выбранная с помощью сигнала выбора, выбирается в качестве заданной позы для фотографирования.
Во второй реализации заданная поза для фотографирования получается из интеллектуального терминала, которая представляет собой позу, заданную в интеллектуальном терминале.
Фотографическое устройство может установить беспроводное соединение с интеллектуальным терминалом и затем через беспроводное соединение получить заданную позу для фотографирования из интеллектуального терминала. Например, в том случае, если фотографическое устройство является камерой для съемки подвижного изображения, и интеллектуальным терминалом является мобильный телефон, камера для съемки подвижного изображения может устанавливать соединение с помощью WiFi ("беспроводная преданность") или соединение с помощью Bluetooth с мобильным телефоном и получить заданную позу для фотографирования из нее. Способ установки заданной позы для фотографирования в мобильном телефоне является аналогичным способу в первой возможной реализации и не будет подробно поясняться здесь.
На этапе 302 определяется то, находится ли фотографическое устройство в горизонтальном положении, согласно датчику силы тяжести.
На этапе 303, если фотографическое устройство находится в горизонтальном положении, поза целевого объекта на изображении вида совпадает с заданной позой для фотографирования или не обнаруживается.
Если определяется, что фотографическое устройство находится в текущий момент времени в горизонтальном положении, это означает, что можно получить горизонтальное изображение, сфотографированное в этот момент времени, и, таким образом, можно достичь лучшего фотографического эффекта. Поэтому фотографическое устройство позволяет обнаружить, совпадает ли поза целевого объекта на изображении вида с заданной позой для фотографирования. Если она совпадает, то процесс переходит на этап 304; если результатом является "Нет", то процесс переходит на этап 306. Обычно целевой объект является одним, то есть способ фотографирования изображения используется для фотографирования отдельного объекта.
В качестве альтернативы, этот этап может включать в себя:
Фотографическое устройство идентифицирует изображение вида и обнаруживает, совпадает ли поза целевого объекта на изображении вида с заданной позой для фотографирования, где поза целевого объекта включает в себя ориентацию головы или угол, под которым расположено тело.
На этапе 304, если поза целевого объекта совпадает с заданной позой для фотографирования, изображение вида соответствует заданным условиям и не обнаруживается.
Заданные условия включают в себя: пропорцию целевого объекта на изображении вида, которая достигает заданной пропорции, и/или зону, занятую целевым объектом на изображении вида, представляющем собой заданную зону.
Если заданные условия включают в себя то, что пропорция целевого объекта на изображении вида достигает заданной пропорции, то в случае, когда поза целевого объекта, обнаруженного фотографическим устройством совпадает с заданной позой для фотографирования, фотографическое устройство может определить пропорцию целевого объекта на изображении вида. Например, для изображения вида, показанного на фиг. 3В, фотографическое устройство может определить, что пропорция целевого объекта на изображении вида составляет 2/5. После определения пропорции, занятой целевым объектом, фотографическое устройство может обнаружить, достигла ли пропорция заданной пропорции. Например, обнаруживается, достигла ли заданная пропорция 1/4 пропорции 2/5.
Если заданные условия включают в себя то, что зона, занятая целевым объектом на изображении вида, представляет собой заданную зону, после того как фотографическое устройство обнаружит, что поза целевого объекта совпадает с заданной позой для фотографирования, фотографическое устройство может определить зону, занятую целевым объектом на изображении вида. Например, при совмещении с фиг. 3B, фотографическое устройство может определить, что зона, занятая целевым объектом, представляет собой зону 31. После определения зоны, занятой целевым объектом на изображении вида, фотографическое устройство может обнаружить, является ли данная зона заданной зоной. Например, зона 31 является заданной зоной 32, или она не обнаруживается. Действительно, зона, занятая целевым объектом на изображении вида, представляет собой заданную зону, описанную в данном варианте осуществления, относится к тому, что зона, занятая на изображении вида, принадлежит заданной зоне. В целях гарантии качества фотографируемого изображения, заданная зона обычно представляет собой центральную зону изображения.
Данный вариант осуществления изображает то, что заданные условия включают в себя вышеупомянутые два условия только посредством иллюстрации. В качестве альтернативы, заданные условия могут также включать в себя другие условия, не ограничиваясь данным вариантом осуществления.
На этапе 305, если изображение вида соответствует заданным условиям, может фотографироваться автоматически изображение, содержащее целевой объект.
В качестве альтернативы, этот этап может включать в себя:
Во-первых, отправляется подсказывающая информация для фотографирования.
В том случае, когда фотографическое устройство обнаруживает, что изображение вида соответствует заданным условиям, оно может выдавать подсказывающую информацию для фотографирования, например, издавая звук "тик-так", похожий на тиканье часов. После того как пользователь услышит речевую подсказывающую информацию, он может узнать о том, что фотографическое устройство будет фотографировать, и затем пользователь может сохранять текущую позу и не двигаться.
Во-вторых, после ожидания в течение заданного периода времени, автоматически фотографируется изображение, содержащее целевой объект.
После того как фотографическое устройство обнаружит, что изображение вида соответствует заданным условиям, оно может запустить таймер. После того как продолжительность времени достигнет заданной продолжительности времени, автоматически фотографируется изображение, содержащее целевой объект.
И если изображение вида не соответствует заданным условиям, фотографическое устройство будет продолжать отыскивать вид и снова выполнять этап 302, который не будет подробно описан здесь.
На этапе 306, если поза целевого объекта не совпадает с заданной позой для фотографирования, то можно отправить речевую подсказывающую информацию, которая используется для подсказки целевому объекту изменить его позу.
В этом случае для того, чтобы сфотографировать изображение, содержащее позу предполагаемого пользователя, фотографическое устройство может выдавать речевую подсказывающую информацию, которая используется для подсказки целевому объекту, изменить его позу. Например, фотографическое устройство может воспроизводить речь: "Пожалуйста, измените свою позу".
Следует отметить, что этапы 302 и 304 являются дополнительными тогда, когда при реализации на практике этап 303 может выполняться непосредственным образом, и когда обнаружение позы целевого объекта совпадает с заданной позой для фотографирования, этап 305 может выполняться без ограничения данного варианта осуществления. На этапах 302 и 304 в данном варианте осуществления порядок выполнения этапов 302-304 выбран только в качестве примера, и, альтернативно, они могут выполняться в любом другом порядке без ограничения данного варианта осуществления.
В одном сценарии применения варианта осуществления пользователь может установить соединение своей камеры для съемки подвижного изображения со своим мобильным телефоном, установить позу, которую он хочет сфотографировать, и затем обеспечить позу, установленную пользователем для камеры для съемки подвижного изображения, используя мобильный телефон. Далее после того как камера для съемки подвижного изображения обнаружит, что поза на изображении вида совпадает с заданной позой и пропорция изображения пользователя на изображении вида и/или зона, занятая изображением пользователя на изображении вида, соответствуют условиям, камера для съемки подвижного изображения может автоматически фотографировать. В качестве альтернативы, прежде чем камера для съемки подвижного изображения выполнит операцию фотографирования, она может дополнительно обнаружить то, находится ли непосредственно камера для съемки подвижного изображения в горизонтальном положении, и выполнить операцию фотографирования только в том случае, если она находится в горизонтальном положении, тем самым улучшая качество сфотографированного изображения.
Таким образом, за счет получения заданной позы для фотографирования с целью автоматического фотографирования изображения, содержащего целевой объект, если поза целевого объекта на изображении вида совпадает с заданной позой для фотографирования, способ фотографирования изображения, выполненный в вариантах осуществления раскрытия, позволяет решить проблему, связанную с тем, что пользователю необходимо сделать несколько попыток, прежде чем будет сфотографировано удовлетворительное изображение; достичь эффектов, связанных с тем, что фотографическое устройство может автоматически фотографировать, когда поза целевого объекта соответствует заданной позе для фотографирования, и, таким образом, уменьшить сложность пользовательских операций. Между тем, за счет автоматического фотографирования изображения, содержащего целевой объект, способ позволяет избежать проблемы, связанной с тем, что наличие кнопки спуска может оказывать негативное влияние на выражение и позу пользователя в том случае, когда он фотографируется в ручном режиме.
За счет обнаружения того, находится ли фотографическое устройство в горизонтальном положении, можно избежать проблемы, связанной с тем, что при наклоне фотографического устройства изображение, сфотографированное им, также имеет наклон.
В варианте осуществления фотографирование выполняется только тогда, когда изображение вида удовлетворяет заданным условиям, таким образом, позволяет избежать проблемы, связанной с тем, что качество изображения, сфотографированного фотографическим устройством в случае целевого объекта на изображении вида, является слишком маленьким, или целевой объект находится на краю изображения вида, и достигает эффекта улучшения качества сфотографированного изображения.
При фотографировании фотографическое устройство может выдавать подсказывающую информацию для фотографирования. После того как пользователь ознакомится с подсказывающей информацией для фотографирования, он может не двигаться и сохранять текущую позу, гарантируя, что фотографическое устройство может снимать изображение, ожидаемое пользователем.
Между тем, когда фотографическое устройство обнаруживает, что поза целевого объекта не совпадает с заданной позой для фотографирования, оно может выдавать речевую подсказывающую информацию для подсказки целевому объекту изменить его позу, гарантируя, что фотографическое устройство может быстрее снимать изображение, содержащее позу, ожидаемую пользователем.
Последующее описание относится к вариантам осуществления устройства. Для получения дополнительной информации о деталях, нераскрытых в вариантах осуществления устройства, пожалуйста, обратитесь к вариантам осуществления способа.
На фиг. 4 показана блок-схема, иллюстрирующая устройство фотографирования изображения согласно примерному варианту осуществления. Как показано на фиг. 4, устройство для фотографирования изображения включает в себя, но не ограничивается этим: модуль 401 получения позы, модуль 402 обнаружения позы и модуль 403 фотографирования изображения.
Модуль 401 получения позы выполнен с возможностью получения заданной позы для фотографирования.
Модуль 402 обнаружения позы выполнен с возможностью обнаружения, если поза целевого объекта на изображении вида совпадает с упомянутой заданной позой для фотографирования, полученной модулем 401 получения позы.
Если поза целевого объекта совпадает с заданной позой для фотографирования, модуль 403 фотографирования изображения выполнен с возможностью автоматического фотографирования изображения, содержащего целевой объект.
Таким образом, устройство фотографирования изображения, выполненное в вариантах осуществления раскрытия, за счет получения заданной позы для фотографирования, позволяет автоматически фотографировать изображение, содержащее целевой объект, когда поза целевого объекта на изображении вида совпадает с заданной позой для фотографирования; решить проблему, связанную с тем, что пользователю необходимо делать несколько попыток, прежде чем будет получено удовлетворительное изображение; и достичь эффектов, связанных с тем, что фотографическое устройство может автоматически фотографировать, когда поза целевого объекта соответствует заданной позе для фотографирования, и, таким образом, уменьшается сложность пользовательских операций.
На фиг. 5 показана блок-схема, иллюстрирующая устройство для фотографирования изображения согласно примерному варианту осуществления. Как показано на фиг. 5, устройство для фотографирования изображения включает в себя, но не ограничивается этим: модуль 501 получения позы, модуль 502 обнаружения позы и модуль 503 фотографирования изображения.
Модуль 501 получения позы выполнен с возможностью получения заданной позы для фотографирования.
Модуль 502 обнаружения позы выполнен с возможностью обнаружения, если поза целевого объекта на изображении вида совпадает с упомянутой заданной позой для фотографирования, полученной модулем 501 получения позы.
Если поза целевого объекта совпадает с заданной позой для фотографирования, модуль 503 фотографирования изображения выполнен с возможностью автоматического фотографирования изображения, содержащего целевой объект.
В качестве альтернативы, модуль 501 получения позы включает в себя: первый подмодуль 501a получения, выполненный с возможностью приема сигнала установки позы и выбора позы, установленной сигналом установки позы, в качестве заданной позы для фотографирования; или второй подмодуль 501b получения, выполненный с возможностью получения заданной позы для фотографирования из интеллектуального терминала, причем заданная поза для фотографирования представляет собой заданную позы в интеллектуальном терминале, позу.
В качестве альтернативы, устройство дополнительно включает в себя: модуль 504 определения положения, выполненный с возможностью определения того, находится ли фотографическое устройство в горизонтальном положении, согласно датчику силы тяжести; и упомянутый модуль 503 фотографирования изображения, выполненный с возможностью выполнения операции автоматического фотографирования изображения, содержащего целевой объект тогда, когда модуль 504 определения положения определяет, что фотографическое устройство находится в горизонтальном положении.
В качестве альтернативы, устройство дополнительно включает в себя: модуль 505 обнаружения изображения, выполненный с возможностью обнаружения того, соответствует ли изображение вида заданным условиям, где заданные условия включают в себя: пропорцию целевого объекта на изображении вида, достигающую заданной пропорции, и/или зону, занятую целевым объектом на изображении вида, представляющем собой заданную зону; и упомянутый модуль 503 фотографирования изображения, выполненный с возможностью выполнения операции автоматического фотографирования изображения, содержащего целевой объект тогда, когда модуль 505 обнаружения изображения обнаруживает, что изображение вида соответствует заданным условиям.
В качестве альтернативы, упомянутый модуль 503 фотографирования изображения включает в себя: подмодуль 503a выдачи информации, выполненный с возможностью выдачи подсказывающей информации для фотографирования; и подмодуль 503b фотографирования изображения, выполненный с возможностью автоматического фотографирования изображения, содержащего целевой объект, после ожидания в течение заданного периода времени.
В качестве альтернативы, устройство дополнительно включает в себя: модуль 506 выдачи подсказывающей информации, выполненный с возможностью отправки речевой подсказывающей информации, когда поза целевого объекта не совпадает с заданной позой для фотографирования, где речевая подсказывающая информация используется для выдачи подсказки целевому объекту изменить позу.
Таким образом, устройство фотографирования изображения, выполненное в вариантах осуществления раскрытия, за счет получения заданной позы для фотографирования может автоматически фотографировать изображение, содержащее целевой объект, если поза целевого объекта на изображении вида совпадает с заданной позой для фотографирования; решить проблему, связанную с тем, что пользователь должен сделать несколько попыток, прежде чем получить удовлетворительное изображение; и достичь эффектов, связанных с тем, что фотографическое устройство может автоматически фотографировать тогда, когда поза целевого объекта соответствует заданной позе для фотографирования, таким образом, уменьшается сложность пользовательских операций. Между тем, за счет автоматического фотографирования изображения, содержащего целевой объект, можно избежать проблемы, связанной с тем, что наличие кнопки спуска может оказывать негативное влияние на выражение и позу пользователя в том случае, когда он фотографируется в ручном режиме.
За счет обнаружения того, находится ли фотографическое устройство в горизонтальном положении перед фотографированием изображения, можно избежать проблемы, связанной с тем, что при наклоне фотографического устройства изображение, сфотографированное им, также имеет наклон.
В варианте осуществления операция фотографирования выполняется только тогда, когда изображение вида удовлетворяет заданным условиям, таким образом можно избежать проблемы, связанной с тем, что качество изображения, сфотографированного фотографическим устройством в случае целевого объекта на изображении вида, является слишком маленьким, или целевой объект находится на краю изображения вида и достигает эффекта улучшения качества сфотографированного изображения.
При фотографировании фотографическое устройство может выдавать подсказывающую информацию для фотографирования. После того как пользователь ознакомится с подсказывающей информацией для фотографирования, он может не двигаться и сохранять текущую позу, гарантируя, что фотографическое устройство может снимать изображение, ожидаемое пользователем.
Между тем, когда фотографическое устройство обнаруживает, что поза целевого объекта не совпадает с заданной позой для фотографирования, оно может выдавать речевую подсказывающую информацию для подсказки целевому объекту изменить его позу, гарантируя, что фотографическое устройство может быстрее снимать изображение, содержащее позу, ожидаемую пользователем.
По отношению к устройствам в приведенных выше вариантах осуществления, специфические способы, в которых соответствующие модули и подмодули выполняют операции, были описаны подробно в вариантах осуществления, которые относятся к соответствующим способам, которые не будут здесь уточняться.
В варианте осуществления раскрытия выполнено устройство фотографирования изображения, которое позволяет реализовать способ фотографирования изображения, выполненный в раскрытии, причем устройство включает в себя: процессор; и память для хранения инструкций, исполняемых процессором; где процессор выполнен с возможностью получения заданной позы для фотографирования; обнаружения того, совпадает ли поза целевого объекта на изображении вида с заданной позой для фотографирования; и автоматического фотографирования изображения, содержащего целевой объект, если поза целевого объекта совпадает с заданной позой для фотографирования.
На фиг. 6 показана блок-схема устройства 600 фотографирования изображения согласно примерному варианту осуществления. Например, устройство 600, может представлять собой мобильный телефон, компьютер, цифровой широковещательный терминал, устройство для обмена сообщениями, игровую приставку, планшетный компьютер, медицинское устройство, тренажерное оборудование, персональный цифровой помощник и т.п.
Как показано на фиг. 6, устройство 600 может включать в себя один или более следующих компонентов: компонент 602 обработки, компонент 604 камеры, компонент 606 электропитания, мультимедийный компонент 608, компонент 610 аудио, интерфейс 612 ввода/вывода (I/O), компонент 614 датчика и компонент 616 связи.
Компонент 602 обработки обычно управляет всеми операциями устройства 600, такими как операции, связанные с отображением, телефонными вызовами, передачей данных, операции, относящиеся к камере, и операции, относящиеся к записи. Компонент 602 обработки может включать в себя один или более процессоров 620, которые исполняют инструкции для выполнения всех или части этапов в вышеописанных способах. Более того, компонент 602 обработки может включать в себя один или более модулей, которые облегчают взаимодействие между компонентом 602 обработки и другими компонентами. Например, компонент 602 обработки может включать в себя мультимедийный модуль для облегчения взаимодействия между мультимедийным компонентом 608 и компонентом 602 обработки.
Компонент 604 камеры выполнен с возможностью захвата изображений. Такой компонент 604 камеры может представлять собой компонент, состоящий из оптических датчиков.
Компонент 606 электропитания обеспечивает подачу питания на различные компоненты устройства 600. Компонент 606 электропитания может включать в себя систему управления мощностью, один или более источников питания и любые другие компоненты, связанные с генерированием, управлением и распределением электропитания в устройстве 600.
Мультимедийный компонент 608 включает в себя экран, обеспечивающий выходной интерфейс между устройством 600 и пользователем. В некоторых вариантах осуществления экран может включать в себя жидкокристаллический дисплей (LCD) и сенсорную панель (TP). Если экран включает в себя сенсорную панель, экран можно реализовать в виде сенсорного экрана для приема входных сигналов от пользователя. Сенсорная панель включает в себя один или более датчиков касания для восприятия касаний, смахиваний и жестов на сенсорной панели. Датчики касания могут не только воспринимать границу действия касания или смахивания, но также и измерять период времени и давление, связанное с действием смахивания или касания. В некоторых вариантах осуществления мультимедийный компонент 608 включает в себя переднюю камеру и/или заднюю камеру. Передняя камера и задняя камера могут принимать внешние мультимедийные данные, в то время как устройство 600 находится в рабочем режиме, таком как режим фотографирования или режим видео. Каждая из передней камеры и задней камеры может представлять собой фиксированную оптическую линзовую систему или иметь возможность фокусировки и оптического масштабирования.
Компонент 610 аудио выполнен с возможностью вывода и/или ввода аудиосигналов. Например, компонент 610 аудио включает в себя микрофон ("MIC"), выполненный с возможностью приема внешнего аудиосигнала, когда устройство 600 находится в рабочем режиме, таком как режим вызова, режим записи и режим распознавания голоса. Принятый аудиосигнал можно дополнительно хранить в памяти 604 или передать через компонент 616 связи. В некоторых вариантах осуществления компонент 610 аудио дополнительно включает в себя громкоговоритель для вывода аудиосигналов.
Интерфейс 612 I/O обеспечивает взаимодействие между компонентом 602 обработки и периферийными интерфейсными модулями, такими как клавиатура, колесо управления, кнопки и т.п. Кнопки могут включать в себя, но этим не ограничиваются, кнопку возврата, кнопку громкости, кнопку "пуск" и кнопку блокировки.
Компонент 614 датчика включает в себя один или более датчиков для выполнения оценки условия различных аспектов устройства 600. Например, компонент 614 датчика может обнаружить открытое/закрытое состояние устройства 600, относительное положение компонентов, например дисплея и клавишной панели, устройства 600, изменение положения устройства 600 или компонента устройства 600, наличие или отсутствие контакта пользователя с устройством 600, ориентацию или ускорение/замедление устройства 600 и изменение температуры устройства 600. Компонент 614 датчика может включать в себя датчик близости, выполненный с возможностью обнаружения наличия находящихся рядом объектов без какого-либо физического контакта. Компонент 614 датчика может также включать в себя светочувствительный датчик, такой как CMOS или датчик изображения на основе CCD, для использования в приложениях по формированию изображений. В некоторых вариантах осуществления компонент 614 датчика может также включать в себя датчик линейных ускорений, гироскопический датчик, магнитный датчик, датчик давления или датчик температуры.
Компонент 616 связи выполнен с возможностью обеспечения проводной или беспроводной связи между устройством 600 и другими устройствами. Устройство 600 может иметь доступ к беспроводной сети на основании стандарта связи, такого как WiFi, 2G или 3G или их комбинации. В одном примерном варианте осуществления компонент 616 связи принимает широковещательный сигнал или информацию, связанную с широковещательным сигналом, из внешней широковещательной системы управления через широковещательный канал. В одном примерном варианте осуществления компонент 616 связи дополнительно включает в себя модуль связи малого радиуса действия (NFC) для обеспечения ближней связи. Например, модуль NFC можно реализовать на основании технологии радиочастотной идентификации (RFID), технологии Ассоциации по средствам передачи данных в инфракрасном диапазоне (IrDA), технологии беспроводной связи сверхширокого диапазона (UWB), технологии Bluetooth (ВТ) и других технологий.
В примерных вариантах осуществления устройство 600 можно реализовать с помощью одной или более специализированных интегральных микросхем (ASIC), процессоров цифровых сигналов (DSP), устройств цифровой обработки сигналов (DSPD), программируемых логических устройств (PLD), вентильных матриц с эксплуатационным программированием (FPGA), контроллеров, микроконтроллеров, микропроцессоров или других электронных компонентов для выполнения вышеописанных способов.
В примерных вариантах осуществления выполнен также невременный машиночитаемый носитель информации, включающий в себя инструкции, которые, например, включены в память 604, исполняемые процессором 620 в устройстве 600, для выполнения вышеописанных способов. Например, невременный машиночитаемый носитель информации может представлять собой постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM), CD-ROM, магнитную ленту, гибкий диск, оптическое устройство хранения данных и т.п.
Следует понимать, что настоящее изобретение не ограничивается точной конструкцией, которая была описана выше и проиллюстрирована на сопроводительных чертежах, и что различные модификации и изменения могут быть сделаны без отклонения от его объема. Предполагается, что объем настоящего изобретения ограничивается только прилагаемой формулой изобретения.



Изобретение относится к области пользовательских интерфейсов устройств для фотографирования изображений, а именно к автоматическому фотографированию, когда поза целевого объекта совпадает с заданной позой для фотографирования. Технический результат заключается в обеспечении пользователю возможности самостоятельного задания желаемой позы фотографируемого объекта, что расширяет возможность получения разнообразных изображений. Для этого получают заданную позу для фотографирования посредством изменения позы модели фигуры человека, отображаемой на устройстве для фотографирования, обнаруживают, совпадает ли поза целевого человека на изображении видоискателя с заданной позой для фотографирования, и если поза целевого человека совпадает с заданной позой для фотографирования, осуществляют автоматическое фотографирование изображения, содержащего целевого человека. При этом заданная поза для фотографирования и поза целевого человека содержат ориентацию головы человека и позицию тела человека. 3 н. и 8 з.п. ф-лы, 7 ил.
1. Способ фотографирования изображения, применяемый в устройстве для фотографирования, содержащий этапы, на которых:
получают заданную позу для фотографирования посредством изменения позы модели фигуры человека, отображаемой на устройстве для фотографирования, причем указанная заданная поза для фотографирования содержит ориентацию головы модели фигуры человека и позицию тела модели фигуры человека;
обнаруживают, совпадает ли поза целевого человека на изображении видоискателя с заданной позой для фотографирования, при этом указанная поза целевого человека содержит ориентацию головы целевого человека и позицию тела целевого человека; и
если поза целевого человека совпадает с заданной позой для фотографирования, осуществляют автоматическое фотографирование изображения, содержащего целевого человека.
2. Способ по п. 1, дополнительно содержащий этапы, на которых:
определяют, расположено ли фотографическое устройство в горизонтальном положении согласно датчику силы тяжести;
если фотографическое устройство расположено в горизонтальном положении, осуществляют автоматическое фотографирование изображения, содержащего целевого человека.
3. Способ по п. 1, дополнительно содержащий этапы, на которых:
обнаруживают, удовлетворяет ли изображение видоискателя заданные условия, где заданные условия содержат то, что пропорция целевого человека на изображении видоискателя больше или равна заданной пропорции и/или целевой человек расположен в заданной области на изображении видоискателя;
если изображение видоискателя соответствует любому из заданных условий, осуществляют автоматическое фотографирование изображения, содержащего целевого человека.
4. Способ по любому из пп. 1-3, в котором этап осуществления автоматического фотографирования изображения, содержащего целевого человека, содержит этапы, на которых:
выдают подсказывающую информацию для фотографирования;
после ожидания в течение заданного периода времени осуществляют автоматическое фотографирование изображения, содержащего целевого человека.
5. Способ по любому из пп. 1-3, дополнительно содержащий этап, на котором:
выдают речевую подсказывающую информацию, причем речевая подсказывающая информация используется для выдачи подсказки целевому человеку изменить позу, если поза целевого человека не совпадает с заданной позой для фотографирования.
6. Устройство фотографирования изображения, содержащее:
модуль получения позы, выполненный с возможностью получения заданной позы для фотографирования посредством изменения позы модели фигуры человека, отображаемой на устройстве для фотографирования, причем указанная заданная поза для фотографирования содержит ориентацию головы модели фигуры человека и позицию тела модели фигуры человека;
модуль обнаружения позы, выполненный с возможностью обнаружения, совпадает ли поза целевого человека на изображении видоискателя с заданной позой для фотографирования, полученной модулем получения позы, при этом указанная поза целевого человека содержит ориентацию головы целевого человека и позицию тела целевого человека;
модуль фотографирования изображения, выполненный с возможностью автоматического фотографирования изображения, содержащего целевого человека, если поза целевого человека совпадает с заданной позой для фотографирования.
7. Устройство по п. 6, дополнительно содержащее:
модуль определения положения, выполненный с возможностью определения, находится ли фотографическое устройство в горизонтальном положении согласно датчику силы тяжести, при этом
модуль фотографирования изображения выполнен с возможностью автоматического фотографирования изображения, содержащего целевого человека, когда модуль определения положения определяет, что фотографическое устройство расположено в горизонтальном положении.
8. Устройство по п. 6, дополнительно содержащее:
модуль обнаружения изображения, выполненный с возможностью обнаружения, соответствует ли изображение видоискателя заданным условиям, причем заданные условия содержат то, что пропорция целевого человека на изображении видоискателя больше или равна заданной пропорции и/или человек расположен в заданной области изображения видоискателя, и
модуль фотографирования изображения, выполненный с возможностью автоматического фотографирования изображения, содержащего целевого человека, при обнаружении модулем обнаружения изображения, что изображение видоискателя удовлетворяет любому из заданных условий.
9. Устройство по любому из пп. 6-8, в котором модуль фотографирования изображения содержит:
подмодуль выдачи информации, выполненный с возможностью выдачи подсказывающей информации для фотографирования;
подмодуль фотографирования изображения, выполненный с возможностью автоматического фотографирования изображения, содержащего целевого человека, после ожидания в течение заданного периода времени.
10. Устройство по любому из пп. 6-8, дополнительно содержащее:
модуль выдачи подсказывающей информации, выполненный с возможностью выдачи речевой подсказывающей информации, когда поза целевого человека не совпадает с заданной позой для фотографирования, при этом речевая подсказывающая информация используется для выдачи подсказки на изменение позы целевому человеку.
11. Устройство фотографирования изображения, содержащее:
процессор;
память для хранения инструкций, исполняемых процессором; при этом
процессор выполнен с возможностью:
получения заданной позы для фотографирования посредством изменения позы модели фигуры человека, отображаемой на устройстве для фотографирования, причем указанная заданная поза для фотографирования содержит ориентацию головы модели фигуры человека и позицию тела модели фигуры человека;
обнаружения, совпадает ли поза целевого человека на изображении видоискателя с заданной позой для фотографирования, при этом указанная поза целевого человека содержит ориентацию головы целевого человека и позицию тела целевого человека; и
осуществления автоматического фотографирования изображения, содержащего целевого человека, если поза целевого человека совпадает с заданной позой для фотографирования.
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ДИСПЛЕЕМ ДЛЯ ЭТОГО УСТРОЙСТВА | 2009 |
|
RU2517064C2 |
| RU 2012102918 A, 10.08.2013 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| CN 103024275 A, 03.04.2013 | |||
| CN 104486542 A, 01.04.2015 | |||
| CN 103795918 A, 14.05.2014 | |||
| CN 103945107 A, 23.07.2014 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

