Изобретение относится к гидроакустическим измерениям и может быть использовано для измерения вертикального распределения скорости звука в море с передачей измерительной информации на судно по гидроакустическому каналу связи.
Известны зонды для измерения вертикального распределения скорости звука в море с передачей измерительной информации на судно по гидроакустическому каналу связи (гидроакустические зонды).
В книге [1] дано описание погружаемого в море на кабель-тросе гидроакустического зонда, состоящего из частотных датчиков скорости звука и глубины, формирователя сигнала излучения, усилителя мощности и гидроакустического излучателя. Излучаемый гидроакустическим излучателем сигнал представляет сумму трех сигналов: стабилизированной кварцем несущей частоты и двух сигналов, частота которых однозначно зависит от значения измеряемой скорости звука и гидростатического давления соответственно.
Причинами, препятствующими достижению технического результата, являются необходимость использования палубного оборудования для погружения и подъема зонда на тросе, невозможность измерять таким зондом на ходу судна, а также малая точность, обусловленная излучением непрерывных аналоговых акустических сигналов зонда, мешающих нормальному функционированию его датчика скорости звука и имеющих низкую помехоустойчивость приема.
Гидроакустический зонд одноразового использования по патенту США [2] содержит герметичный контейнер с импульсно-циклическим датчиком скорости звука, датчиком гидростатического давления (глубины), амплитудным модулятором, генератором фиксированной частоты, усилителем мощности, гидроакустическим излучателем и автономным источником питания.
Причинами, препятствующими достижению технического результата, являются сложность конструкции и большая стоимость одноразового гидрологического зонда, а также малая точность, обусловленная излучением непрерывных аналоговых акустических сигналов зонда, мешающих нормальному функционированию его датчика скорости звука и имеющих низкую помехоустойчивость приема.
Гидроакустический зонд для измерения скорости звука в море по авторскому свидетельству СССР [3] состоит из импульсно-циклического датчика скорости звука, задающего генератора, преобразователя частотного сигнала датчика в двоичный код, акустического передатчика и автономного источника питания. Датчик скорости звука включает в себя последовательно электрически связанные импульсный генератор, цилиндрический пьезоэлектрический преобразователь и усилитель принятого сигнала. Задающий генератор состоит из последовательно электрически соединенных кварцевого генератора фиксированной частоты, первого и второго делителей частоты и элемента задержки. Преобразователь частотного сигнала датчика скорости звука в двоичный код выполнен из последовательно соединенных вычитающего устройства, временного селектора, двоичного счетчика и сдвигового регистра, последовательно соединенных формирователя интервала отсчетов, формирователя маркерного сигнала и формирователя сигнала параллельной записи. Акустический передатчик включает в себя импульсный амплитудный модулятор, усилитель мощности и гидроакустический излучатель.
Гидроакустический зонд для измерения скорости звука в море излучает импульсный цифровой акустический радиосигнал и поэтому у него отсутствуют недостатки, характерные для зондов с аналоговым излучающим сигналом.
Причинами, препятствующими достижению технического результата, являются низкая точность измерения скорости звука, вследствие использования импульсно-циклического датчика скорости звука с цилиндрическим акустическим преобразователем при наличии в его рабочей внутренней полости многократных отражений акустического сигнала, которые мешают приему полезного сигнала, повышенная стоимость одноразового гидроакустического зонда из-за сложности его задающего генератора и преобразователя частотного сигнала датчика скорости звука в двоичный код, выполненных из большого количества отдельных цифровых и логических микросхем.
Наиболее близким по совокупности признаков и технической сущности к предлагаемому изобретению является гидрологический зонд для измерения скорости звука в море по полезной модели [4], содержащий автономный источник питания и схему его включения, цилиндрический пьезоэлектрический преобразователь, последовательно электрически соединенные усилитель мощности и гидроакустический излучатель, кварцевый генератор, импульсный генератор, усилитель принятого сигнала, аналого-цифровой преобразователь и микроконтроллер, вход аналого-цифрового преобразователя подключен к выходу усилителя принятого сигнала, а выходы аналого-цифрового преобразователя и кварцевого генератора подсоединены к соответствующим входам микроконтроллера, первый выход которого подключен к входу импульсного генератора, а второй выход микроконтроллера подсоединен к входу усилителя мощности.
Причиной, препятствующей достижению технического результата, является наличие в зонде-прототипе дополнительного акустического преобразователя для излучения гидроакустических сигналов, несущих измерительную информацию о скорости звука в море, что усложняет конструкцию гидроакустического зонда и увеличивает его стоимость.
Технический результат, который может быть получен при осуществлении предлагаемого изобретения, состоит в упрощении конструкции гидроакустического зонда для измерения скорости звука в море и уменьшении его стоимости.
Для достижения технического результата в предлагаемом гидроакустическом зонде для измерения скорости звука в море дополнительно введен переключатель, к выходу которого подключен цилиндрический пьезоэлектрический преобразователь, первый вход переключателя электрически связан с выходом импульсного генератора и входом усилителя принятого сигнала, второй вход переключателя подсоединен к выходу усилителя мощности, а третий вход переключателя подключен к третьему выходу микроконтроллера.
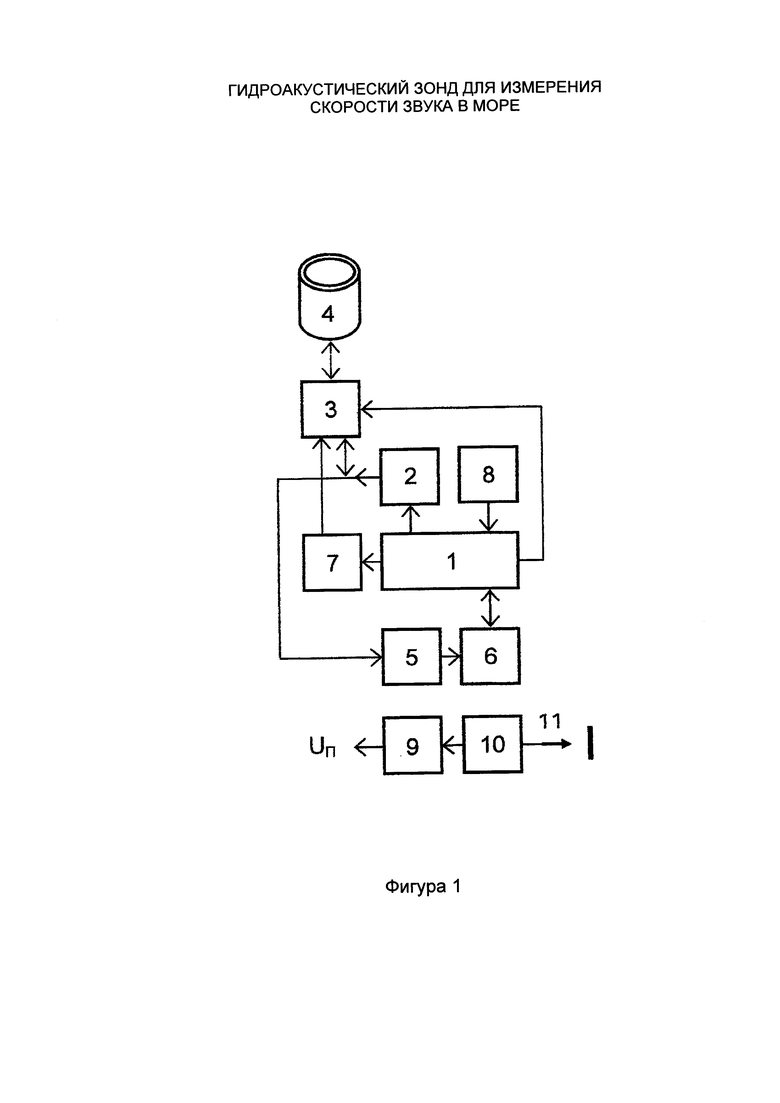
Сущность изобретения поясняется фигурой 1, на которой представлена структурная схема гидроакустического зонда для измерения скорости звука в море.
Гидроакустический зонд для измерения скорости звука в море содержит: микроконтроллер 1; импульсный генератор 2; переключатель 3; цилиндрический акустический преобразователь 4; усилитель 5; аналого-цифровой преобразователь (АЦП) 6; усилитель мощности 7; кварцевый генератор 8; автономный источник питания 9; схему включения источника питания 10 с контактом 11.
Гидроакустический зонд для измерения скорости звука в море функционирует следующим образом.
После сброса зонда за борт судна контакт 11 электрически соединяется через малое сопротивление соленой воды с металлическим корпусом зонда, при этом срабатывает схема 10, которая включает автономный источник питания 9, подающий на все электронные схемы зонда электрическое напряжение Uп. Переключатель 3 находится в положении «Измерение». По команде микроконтроллера 1 с выхода импульсного генератора 2 через переключатель 3 на обратимый цилиндрический акустический преобразователь 4 подается электрический видеоимпульс. Цилиндрический пьезоэлемент преобразователя 3 ударно возбуждается по толщине стенки h на частоте f≈0.5·CK/h, где CK - скорость звука в пьезоэлектрическом материале преобразователя. Если CK≈4000 м/с и h≈10-3 м, то f≈2 МГц. Соответствующий акустический радиоимпульс распространяется в воде, заполняющей внутреннюю полость цилиндра, до противоположного участка внутренней поверхности, где отражается и возвращается обратно. Данный процесс отражений повторяется многократно.
С выхода цилиндрического пьезоэлемента 4 принятый и преобразованный в электрический радиоимпульс через переключатель 3 и усилитель 5 поступает на вход АЦП 6, который микроконтроллером 1 включается через время t1 после момента излучения импульса, и до момента времени t2 производится оцифровка сигнала с выхода усилителя и передача его в микропроцессор 1. Интервалы времени t1 и t2 определяются как t1=n·d/C1 и t2=n·d/C2, где d-h - внутренний диаметр цилиндрического пьезоэлемента акустического преобразователя, n - число используемых отражений акустического импульса при его распространении в воде во внутренней полости цилиндра, С1≈1600 м/с - максимальное для данного датчика измеряемое значение скорости звука в воде, С2≈1400 м/с - значение скорости звука немного меньшее, чем минимально возможное ее значение в воде (~ 1402 м/с).
Для обеспечения процесса полного затухания отражений акустических импульсов, излучение радиоимпульсов производится с периодом следования, которое значительно больше значения времени t2.
В промежутке времени от t1 до t2 микроконтроллер 1 определяет время прихода tc принятого радиоимпульса и по нему находит измеренное значение скорости звука в воде по формуле C=n·d/tC, которое запоминается. По команде микроконтроллера 1 переключатель 3 переводится в положение «Передача». Далее микроконтроллер 1 вырабатывает цифровой электрический радиосигнал, соответствующий измеренному значению скорости звука C.
Усиленный усилителем мощности 7 цифровой электрический радиосигнал через переключатель 3 подается на цилиндрический акустический преобразователь 4, который возбуждается радиально. При этом его средний радиус совершает пульсирующие колебания, вызывая изменение (увеличение и уменьшение) на некоторую величину длины средней окружности пьезоцилиндра. Акустический преобразователь 4 излучает в воду соответствующий цифровой акустический сигнал. Несущая частота акустического сигнала равна f0=CK/n(d+h). Пусть, как и ранее, CK≈4000 м/с, h≈10-3 м, а d≈0,02 м, тогда f0≈30 кГц. Данные о значении скорости звука передаются по окончании цикла ее измерения и не создают нежелательных акустических помех. После передачи цифрового сигнала микроконтроллер 1 переводит переключатель 3 в положение «Измерение» и режимы функционирования зонда непрерывно повторяются. Работа всех цифровых схем синхронизируется кварцевым генератором 8.
В предлагаемом гидроакустическом зонде для измерения скорости звука в море один цилиндрический пьезоэлектрический преобразователь поочередно выполняет функции измерительной базы при измерении скорости звука и гидроакустического излучателя, передающего цифровую измерительную информацию на судно через водную среду. Это позволяет упростить конструкцию гидроакустического зонда для измерения скорости звука в море и уменьшить его стоимость.
СПИСОК БИБЛИОГРАФИЧЕСКИХ ИСТОЧНИКОВ
1. Комляков В.А. Корабельные средства измерения скорости звука и моделирования акустических полей в океане. СПб.: Наука. 2003. 357 с.
2. Pat. 3341808 USA. CI. 340-5. Telemetering apparatus / Levin M., Stahl R.A. Filed 12.10.1965. Publ. 12.09.1967.
3. A.c. 1770770 СССР. G 01 H 5/00. Акустический зонд для измерения скорости звука в море / Попов Е.Д., Матвеев М.В. Заявл. 11.01.1990. Опубл. 23.10.1992. БИ №39.
4. Патент на полезную модель G 01 H 5/00. Серавин Г.Н., Микушин И.И., Лобанов В.Н. Гидрологический зонд для измерения скорости звука в море / Заявл. 12.03.2014. Опубл. 27.10.2014. Бюл. №30.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ ЗОНД | 2010 |
|
RU2436119C1 |
| Акустический зонд для измерения скорости звука в море | 1990 |
|
SU1770770A1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЛУБИН И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614854C2 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ЗВУКА В ВОДЕ | 2013 |
|
RU2545065C2 |
| ГИДРОДИНАМИЧЕСКИЙ ЗОНД ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ЗВУКА В МОРЕ | 2017 |
|
RU2667322C2 |
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука и измерения его координат | 2021 |
|
RU2770564C1 |
| ГИДРОАКУСТИЧЕСКИЙ АВТОНОМНЫЙ ВОЛНОГРАФ | 2011 |
|
RU2484428C2 |
| УСТРОЙСТВО ГИДРОАКУСТИЧЕСКОЙ ВИЗУАЛИЗАЦИИ | 2014 |
|
RU2568338C1 |
| Гидроакустическая станция контроля подводной обстановки | 2019 |
|
RU2724145C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
Изобретение относится к гидроакустическим измерениям и может быть использовано для измерения вертикального распределения скорости звука в море с передачей измерительной информации на судно по гидроакустическому каналу связи. Сущность: после сброса гидроакустического зонда в морскую воду специальная схема включает его автономный источник питания, по команде микроконтроллера импульсный генератор через переключатель ударно возбуждает видеоимпульсом цилиндрический пьезоэлектрический преобразователь по толщине стенки. Принятые радиоимпульсы, соответствующие многократно отраженным от поверхности заполненной водой внутренней полости цилиндрического пьезоэлемента акустическим импульсам, через переключатель, усилитель и аналого-цифровой преобразователь поступают в микроконтроллер, который определяет времена их прихода, вычисляет по ним измеренные значения скорости звука в воде и запоминает их. Микроконтроллер формирует соответствующий этим значениям цифровой электрический радиосигнал, который подается через усилитель мощности и переключатель на цилиндрический пьезоэлектрический преобразователь - гидроакустический излучатель зонда, радиально колеблющийся и передающий цифровую измерительную информацию на судно через водную среду. Технический результат состоит в упрощении по сравнению с аналогичными гидроакустическими зондами для измерения скорости звука в море конструкции зонда и уменьшении его стоимости. 1 ил.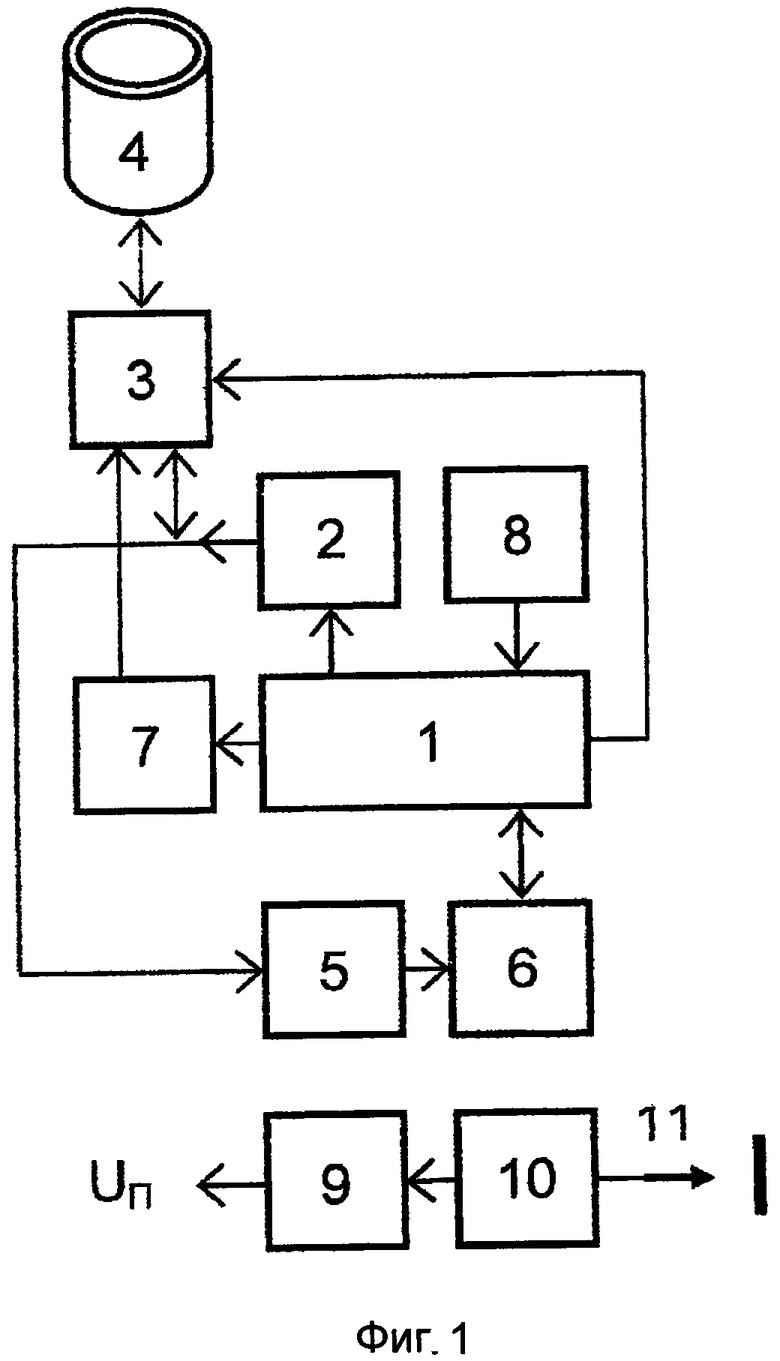
Гидроакустический зонд для измерения скорости звука в море, содержащий автономный источник питания и схему его включения, цилиндрический пьезоэлектрический преобразователь, усилитель мощности, кварцевый генератор, импульсный генератор, усилитель принятого сигнала, аналого-цифровой преобразователь и микроконтроллер, вход аналого-цифрового преобразователя подключен к выходу усилителя принятого сигнала, а выходы аналого-цифрового преобразователя и кварцевого генератора подсоединены к соответствующим входам микроконтроллера, первый выход которого подключен к входу импульсного генератора, а второй выход микроконтроллера подсоединен к входу усилителя мощности, отличающийся тем, что дополнительно введен переключатель, к выходу которого подсоединен цилиндрический пьезоэлектрический преобразователь, первый вход переключателя электрически связан с выходом импульсного генератора и входом усилителя принятого сигнала, второй вход переключателя подключен к выходу усилителя мощности, а третий вход переключателя подсоединен к третьему выходу микроконтроллера.
| Устройство для установки электродных выводов полупроводниковых приборов в центр электродов и автоматической припайки выводов к электродам | 1961 |
|
SU147257A1 |
| СПОСОБ ИЗМЕРЕНИЯ РАСПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА В ЖИДКОЙ СРЕДЕ | 2010 |
|
RU2456554C2 |
| Гидрологический измеритель скорости звука | 1986 |
|
SU1465715A2 |
| Применение в охарактеризованной в п. 1 доп. пат. № 11613 А.А. Шершнева топки за шахтой | 1928 |
|
SU18858A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ЗВУКА | 2012 |
|
RU2515125C1 |
| WO2001042808 A2, 14.06.2001. | |||

