Изобретение относится к области гидроакустических навигационных систем и может быть использовано для навигационного обеспечения подводных аппаратов, работающих в ледовых условиях, затрудняющих доступ к ним обеспечивающего судна, и также может быть использовано при проведении сейсмических и геологоразведочных работ на морском дне с использованием буксируемых или телеуправляемых подводных аппаратов.
Акустические навигационные системы с ультракороткой базой производятся значительным количеством компаний для различных областей применения - от позиционирования аквалангистов на мелководье до определения местоположения объектов на больших глубинах и дальностях. Наиболее известными являются гидроакустические навигационные системы фирм IXSEA, SIMRAD, SONARDYNE, KONGSBERG, GeoAcoustics. Типовые характеристики систем средней дальности до 3 км имеют частоты в диапазоне 20-30 кГц, точность - единицы процентов наклонной дальности. Системы дальнего действия порядка 10 км работают в диапазоне частот 10-15 кГц, заявленная точность навигации некоторых систем достигает 0.1% наклонной дальности. Наиболее широкое применение имеют две навигационные системы типа POSIDONIA и HIPAP-500. Первая использует сложные сигналы и за счет этого имеет улучшения отношения сигнал/шум по сравнению с тональными посылками на 19 дБ. В настоящее время заявленная точность составляет 0.3% наклонной дальности. Вторая представляет собой мощную фазируемую антенну, состоящую из сотен независимых приемников, имеющую, по утверждению изготовителя, избыточность в количестве приемников, вычислительных средствах и математическом обеспечении. Заявленная точность составляет 0.1% наклонной дальности, угол обзора - 200 град в вертикальной плоскости. Система сбора акустических данных этой системы не уступает системам сбора данных, например многолучевых эхолотов высокого разрешения, однако имеет высокую стоимость.
Известные системы акустической навигации, использующие принцип ультракороткой базы, определяют пространственное положение позиционируемого объекта путем измерения времени пробега и направления прихода акустических волн, излученных маяком, установленным на этом объекте, с помощью многоэлементной приемной антенны. Измеренное время пробега пересчитывается с учетом профиля скорости звука в наклонную дальность, а направление прихода волны на поверхность антенны с учетом наклонов и азимута самой антенны позволяет определить точку, из которой излучение звука было произведено. Измерение времени пробега производится путем анализа формы принятого звукового сигнала, при этом точность измерения времени определяется шириной полосы приемного тракта и отношением сигнал/шум. Определение направления прихода звуковой волны в УКБ системах производится путем измерения разности фаз сигналов, принятых разными гидрофонами, с последующим пересчетом разности фаз в геометрические углы с учетом характерной длины волны акустического сигнала и пространственного разнесения приемников. Точность измерения направления при этом определяется дистанцией между приемниками и отношением сигнал/шум. Точность измерения времени пробега или, другими словами, точность определения положения объекта вдоль луча, не зависит от расстояния (при достаточно высоком уровне сигнала по сравнению с шумами) и для традиционных систем дальнего действия составляет доли метра. При фиксированном угловом разрешении ошибка измерения положения объекта поперек луча линейно увеличивается с дистанцией и, как правило, характеризуется в процентном отношении к наклонной дальности. Лучшие образцы УКБ систем имеют угловую точность порядка 0.1%, что при дальности порядка 5 км соответствует точности поперек луча 5 м. Поскольку конечной целью использования любой навигационной системы является определение географических координат объекта, угловое разрешение является главной характеристикой УКБ системы.
Техническая сущность известных гидроакустических систем для обеспечения подводной навигации изложена в источниках патентной информации (патенты RU №2084924 [1], RU №2084923 [2], RU №2289149 [3], RU №34020U [4], RU №2158431 [5], RU №2308454 [6], RU №2038127 [7], авторское свидетельство SU №713278 [8], RU №2365939 [9], RU №2371738 [10], WO №0123908 A1, 05.04.2001 [11] и в технической литературе: Милн П.Х. Гидроакустические системы позиционирования. - Л.: Судостроение, 1989 г., с.49-60 [12] и другие).
Наиболее близкими по своей сути к заявляемому объекту техники являются устройства, приведенные в патентных описаниях [3] и [8] и в источнике [12].
Известна гидроакустическая синхронная дальномерная навигационная система [12], состоящая из базы гидроакустических приемоответчиков, служащих для измерения времени распространения акустических сигналов от объекта навигации до маяков, устройства вычисления дистанции по измеренному времени распространения и известной скорости звука и устройства вычисления координат объекта навигации по найденным значениям дистанций, размещенного на судне обеспечения.
Недостатком такой системы является большая погрешность определения координат, связанная с изменчивостью скорости звука в морской среде.
Известна также гидроакустическая синхронная дальномерная навигационная система [8], содержащая донную базу из М гидроакустических приемоответчиков с различными частотами ответа, размещенные на объекте навигации передатчик, вход которого соединен с первым выходом генератора синхроимпульсов, М-канальный приемник, выходы которого подключены к входам М измерителей времени распространения гидроакустических сигналов до соответствующего приемоответчика и обратно, вторые входы которых соединены с вторым выходом генератора синхроимпульсов, M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых подключены к соответствующим выходам измерителей времени распространения, М блоков выбора максимального значения, входы которых соединены с выходами N блоков каждого из М каналов преобразования временных интервалов в дистанции, вычислитель координат объекта навигации, вход которого соединен с выходами М блоков выбора максимального значения.
Наличие в структуре навигационной системы блоков преобразования временных интервалов в дистанции, работающих по алгоритму, учитывающему изменчивость скорости звука и эффекты многолучевости, позволяет снизить погрешность определения координат. Такая система по технической сущности является наиболее близкой к предлагаемому изобретению.
Недостатком указанной навигационной системы является относительно малая дальность действия при работе объекта навигации вблизи дна и при использовании донных маяков-ответчиков, которая связана с эффектами рефракции звука вблизи дна. В основу технического решения [3] положена задача разработки гидроакустической синхронной навигационной системы с большей дальностью действия без увеличения погрешности определения координат объекта навигации. Поставленная задача известным устройством [3] решается тем, что в состав гидроакустической синхронной дальномерной навигационной системы дальнего действия, содержащей донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа fm (m=1-M), размещенные на объекте навигации генератор синхроимпульсов, акустический передатчик с частотой опроса f0, вход которого соединен с первым выходом генератора синхроимпульсов. М-канальный приемник для приема ответных сигналов с частотами fm, M измерителей времени распространения акустических сигналов до приемоответчика, работающего на частоте этого канала, и обратно, первые входы которых соединены с выходами М канального приемника, а вторые входы соединены с вторым выходом генератора синхроимпульсов, M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения, М блоков выбора максимального значения дистанции, входы которых соединены с выходами N блоков преобразования временных интервалов в дистанции данного канала, вычислитель координат объекта навигации, первый вход которого соединен с выходами М блоков выбора максимального значения дистанций, введены дополнительно вторая донная навигационная база из М гидроакустических маяков-пингеров с различными частотами излучения Fm (m=1-M), механически связанных с соответствующими М маяками-ответчиками, содержащих М синхронно работающих генераторов синхроимпульсов, М передатчиков с различными рабочими частотами Fm, входы которых соединены с выходами генераторов синхроимпульсов, М гидроакустических излучателей с рабочими частотами Fm, входы которых соединены с выходами передатчиков с соответствующими рабочими частотами.
Кроме того, на объекте навигации дополнительно размещены второй генератор синхроимпульсов, работающий синхронно с генераторами синхроимпульсов маяков-пингеров, первый выход которого используется для синхронизации М синхронно работающих генераторов синхроимпульсов гидроакустических маяков-пингеров перед их установкой на дно, буксируемая приемная акустическая антенна, второй М канальный приемник для приема акустических сигналов маяков-пингеров, вход которого соединен с выходом буксируемой приемной акустической антенны, М измерителей времени распространения акустических сигналов от маяков-пингеров до объекта навигации, первые входы которых соединены с выходами второго М канального приемника, а вторые входы соединены с вторым выходом второго генератора синхроимпульсов, дополнительные М блоков преобразования временных интервалов в дистанции, входы которых соединены с выходами М измерителей времени распространения акустических сигналов от маяков-пингеров до объекта навигации, а выходы соединены с вторыми входами вычислителя координат объекта навигации, причем М гидроакустических излучателей маяков-пингеров и буксируемая приемная акустическая антенна расположены вблизи морского дна на расстоянии не более длины волны на рабочих частотах Fm, а дополнительные М блоков преобразования временных интервалов в дистанции вычисляют искомые расстояния rm через измеренные времена распространения tm по известной формуле с учетом скорости распространения придонной волны, предварительно вычисленной через параметры пограничных сред границы раздела вода - морское дно по известной формуле с учетом плотности и скорости звука в придонном слое воды и плотности и скорости звука в осадочном слое морского дна [3].
Существенным недостатками известной гидроакустической синхронной дальномерной навигационной системы дальнего действия [3] является то, что получение координат подводного объекта отягощено многочисленными и трудоемкими вычислениями, обусловленными учетом скорости распространения придонной волны, плотности и скорости звука. При проведении исследований в районах со сложным рельефом эффективность вычислений может привести к обратному результату, т.е. к проявлению дополнительной погрешности в итоговых результатах определения координат подводного объекта. Кроме того, с учетом того, что донная навигационная база расположена на дне, а приемник акустических сигналов находится на подводном объекте, т.е. на разных горизонтах по глубине, то в вычисления также необходимо вводить поправочные коэффициенты.
Задачей заявляемого технического решения является повышение надежности в определении координат подводного объекта посредством гидроакустической навигационной системы с одновременным сокращением трудоемкости определения координат.
Поставленная задача решается за счет того, что в гидроакустической синхронной дальномерной навигационной системе для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических приемоответчиков, содержащей донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа fm (m=1-M), размещенные на объекте навигации генератор синхроимпульсов, акустический передатчик с частотой опроса f0, вход которого соединен с первым выходом генератора синхроимпульсов. М-канальный приемник для приема ответных сигналов с частотами fm, M измерителей времени распространения акустических сигналов до приемоответчика, работающего на частоте этого канала, и обратно, первые входы которых соединены с выходами М-канального приемника, а вторые входы соединены с вторым выходом генератора синхроимпульсов, M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения, М блоков выбора максимального значения дистанции, входы которых соединены с выходами N блоков преобразования временных интервалов в дистанции данного канала, вычислитель координат объекта навигации, первый вход которого соединен с выходами М блоков выбора максимального значения дистанций, М гидроакустических приемоответчиков снабжены М гидроакустическими маяками-пингерами, образующими дополнительную вторую донную навигационную базу из М гидроакустических маяков-пингеров с различными частотами излучения Fm (m=1-M), механически связанных с соответствующими М гидроакустическими маяками-ответчиками, содержащих М синхронно работающих генераторов синхроимпульсов, М передатчиков с различными рабочими частотами Fm, входы которых соединены с выходами генераторов синхроимпульсов, М гидроакустических излучателей с рабочими частотами Fm, входы которых соединены с выходами передатчиков с соответствующими рабочими частотами, на объекте навигации дополнительно размещены второй генератор синхроимпульсов, работающий синхронно с генераторами синхроимпульсов гидроакустических маяков-пингеров, первый выход которого используется для синхронизации М синхронно работающих генераторов синхроимпульсов гидроакустических маяков-пингеров перед их установкой на дно, буксируемая приемная акустическая антенна, второй М-канальный приемник для приема акустических сигналов гидроакустических маяков-пингеров, вход которого соединен с выходом буксируемой приемной акустической антенны, М измерителей времени распространения акустических сигналов от гидроакустических маяков-пингеров до объекта навигации, первые входы которых соединены с выходами второго М-канального приемника, а вторые входы соединены с вторым выходом второго генератора синхроимпульсов, дополнительные М блоков преобразования временных интервалов в дистанции, входы которых соединены с выходами М измерителей времени распространения акустических сигналов от гидроакустических маяков-пингеров до объекта навигации, а выходы соединены с вторыми входами вычислителя координат объекта навигации, причем М гидроакустических излучателей гидроакустических маяков-пингеров и буксируемая приемная акустическая антенна расположены вблизи морского дна на расстоянии не более длины волны на рабочих частотах Fm, а дополнительные М блоков преобразования временных интервалов в дистанции вычисляют искомые расстояния rm через измеренные времена распространения tm, в отличие от прототипа [3] на объекте навигации установлен приемоиндикатор приема спутниковых сигналов, первая приемная антенна которого установлена на его корпусе, а вторая приемная антенна - на блоке счетчике перемещений кабель-троса, соединяющего объект навигации с буксируемой приемной акустической антенной, и еще n приемных антенн установлены на гидроакустических маяках-пингерах, М гидроакустических приемоответчиков снабжены якорем балластом с гидроакустическим размыкателем, антенна М-канального приемника выполнена цилиндрической формы из М гидрофонов, образующих в горизонтальной плоскости две навигационные базы регистрации акустических сигналов, М гидроакустических приемоответчиков и маяков-пингеров и объект навигации снабжены датчиками измерения скорости звука в воде, гидродинамического давления, ориентации, вычислитель координат объекта навигации своими входами соединен с выходами блока выбора максимального значения дистанции в М-м канале, приемоиндикатора спутниковых радиосигналов, датчиков измерения гидродинамического давления, скорости звука и ориентации.
В заявляемой гидроакустической синхронной дальномерной навигационной системе для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических приемоответчиков общими существенными признаками для нее и для ее прототипа являются:
- гидроакустическая синхронная дальномерная навигационная система дальнего действия, содержащая донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа fm (m=1-M);
- размещенные на объекте навигации генератор синхроимпульсов, акустический передатчик с частотой опроса f0, вход которого соединен с первым выходом генератора синхроимпульсов;
- М-канальный приемник для приема ответных сигналов с частотами fm;
- М измерителей времени распространения акустических сигналов до приемоответчика, работающего на частоте этого канала, и обратно, первые входы которых соединены с выходами М-канального приемника, а вторые входы соединены с вторым выходом генератора синхроимпульсов;
- M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения;
- М блоков выбора максимального значения дистанции, входы которых соединены с выходами N блоков преобразования временных интервалов в дистанции данного канала;
- вычислитель координат объекта навигации, первый вход которого соединен с выходами М блоков выбора максимального значения дистанций;
- вторая донная навигационная база из М гидроакустических маяков-пингеров с различными частотами излучения Fm (m=1-M), механически связанных с соответствующими М маяками-ответчиками, содержащими:
- М синхронно работающих генераторов синхроимпульсов;
- М передатчиков с различными рабочими частотами Fm, входы которых соединены с выходами генераторов синхроимпульсов;
- М гидроакустических излучателей с рабочими частотами Fm, входы которых соединены с выходами передатчиков с соответствующими рабочими частотами;
- размещенный на объекте навигации второй генератор синхроимпульсов, работающий синхронно с генераторами синхроимпульсов маяков-пингеров, первый выход которого используется для синхронизации М синхронно работающих генераторов синхроимпульсов гидроакустических маяков-пингеров перед их установкой на дно;
- буксируемая приемная акустическая антенна;
- второй М-канальный приемник для приема акустических сигналов маяков-пингеров, вход которого соединен с выходом буксируемой приемной акустической антенны;
- М измерителей времени распространения акустических сигналов от маяков-пингеров до объекта навигации, первые входы которых соединены с выходами второго М-канального приемника, а вторые входы соединены с вторым выходом второго генератора синхроимпульсов;
- дополнительные М блоков преобразования временных интервалов в дистанции, входы которых соединены с выходами М измерителей времени распространения акустических сигналов от маяков-пингеров до объекта навигации, а выходы соединены с вторыми входами вычислителя координат объекта навигации;
- М гидроакустических излучателей маяков-пингеров и буксируемая приемная акустическая антенна расположены вблизи морского дна на расстоянии не более длины волны на рабочих частотах Fm;
- дополнительные М блоков преобразования временных интервалов в дистанции вычисляют искомые расстояния rm через измеренные времена распространения tm. Сопоставительный анализ существенных признаков заявляемой гидроакустической синхронной дальномерной навигационной системы для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических приемоответчиков и прототипа показывает, что первая в отличие от прототипа имеет следующие отличительные признаки:
- дополнительная вторая донная навигационная база из М гидроакустических маяков-пингеров с различными частотами излучения Fm (m=1-M), механически связанных с соответствующими М маяками-ответчиками, также связана электрически с теми же соответствующими М маяками-ответчиками;
- на объекте навигации установлен приемоиндикатор приема спутниковых сигналов, первая приемная антенна которого установлена на его корпусе, а вторая приемная антенна - на блоке счетчике перемещений кабель-троса, соединяющего объект навигации с буксируемой приемной акустической антенной, и еще n приемных антенн установлены на маяках-пингерах дополнительной второй донной базы;
- М гидроакустических приемоответчиков снабжены якорем балластом с гидроакустическим размыкателем;
- антенна М-канального приемника выполнена цилиндрической формы из М гидрофонов, образующих в горизонтальной плоскости две навигационные базы регистрации акустических сигналов;
- вычислитель координат объекта навигации своими входами соединен с выходами блока выбора максимального значения дистанции в М-м канале, приемоиндикатора спутниковых радиосигналов, датчиков измерения гидродинамического давления, скорости звука и ориентации;
- М гидроакустических приемоответчиков и маяков-пингеров, объект навигации и буксируемая приемная акустическая антенна снабжены датчиками измерения скорости звука в воде, гидродинамического давления, ориентации.
Совокупность новых отличительных признаков заявляемого объекта техники обеспечивает получение технического результата, заключающегося в повышение надежности в определении координат подводного объекта посредством гидроакустической навигационной системы с одновременным сокращением трудоемкости определения координат за счет того, что исключаются многочисленные вычисления значений скорости распространения придонной волны, плотности и скорости звука в придонном слое воды, плотности и скорости звука в осадочном слое морского дна, обеспечивается информационная избыточность при определении координат подводного объекта навигации, что уменьшает погрешность определения координат подводного объекта навигации.
Сущность заявляемого технического решения поясняется чертежами.
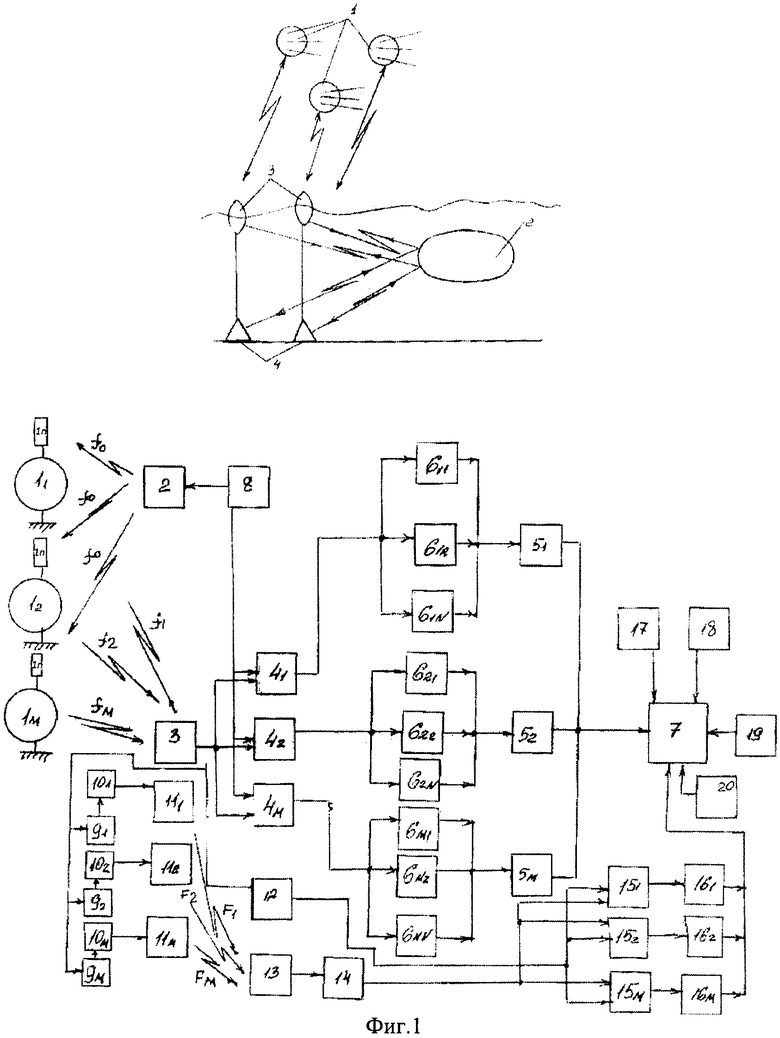
Фиг.1. Блок-схема устройства.
На чертеже и в описании приняты следующие обозначения:
1m - приемоответчик m-го канала с гидроакустическим маяком-пингером 1n, 2 - передатчик акустических импульсов запроса на частоте f0, 3 - первый М-канальный приемник акустических сигналов ответа на частотах fm, 4m - измеритель времени распространения акустических сигналов до маяка-ответчика и обратно в m-м канале, 5m - блок выбора максимального значения дистанции в m-м канале, 6mn (m=1-M, n=1-N) - блок преобразования временных интервалов в дистанции, 7 - вычислитель координат объекта навигации, 8 - первый генератор синхроимпульсов, 9m - генератор синхроимпульсов m-го гидроакустического маяка-пингера, 10m - передатчик m-го гидроакустического маяка-пингера, 11m - излучатель m-го гидроакустического маяка-пингера, 12 - второй генератор синхроимпульсов, 13 - буксируемая приемная акустическая антенна, 14 - второй М-канальный приемник акустических сигналов гидроакустических гидроакустических маяков-пингеров, 15m - измеритель времени распространения акустических сигналов от гидроакустического маяка-пингера до объекта навигации, 16m - дополнительный блок преобразования временных интервалов в дистанции m-го канала, 17 - приемоиндикатор спутниковых радиосигналов, 18 - датчик измерения скорости звука, 19 - датчик измерения гидродинамического давления, 20 - датчик ориентации.
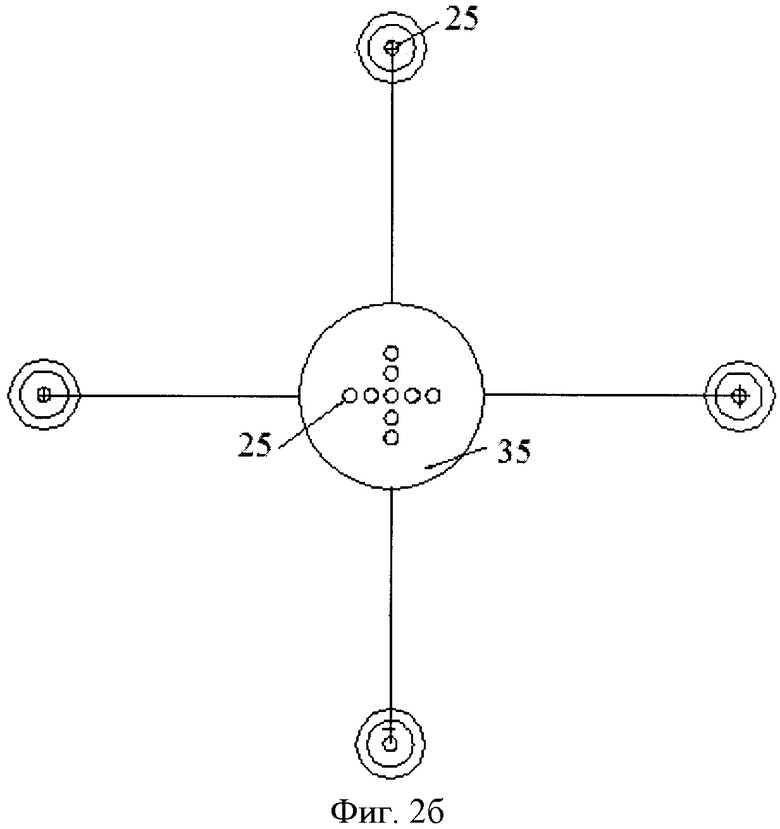
Фиг.2. Подводный объект навигации (фиг.2а - вид сбоку, фиг.2б - вид справа, фиг.2в - вид спереди). На фиг.2 позициями обозначены антенна 21 приемника акустических сигналов 2, излучатель 22 передатчика акустических сигналов 2, блок электроники 23, блок предварительных усилителей 24, датчик измерения скорости звука 18, датчик определения гидродинамического давления 19, датчик ориентации 20, гидрофоны 25, стабилизаторы гидродинамические 26, груз котировочный 27, кардан 28, датчик уклонов 29 кабель-троса 30, дышло 31, блок счетчик 32, антенна 33 приемоиндикатора 17 спутниковых сигналов, обтекатель 34, плита 35 стальная, кронштейн 36 перфорированный.
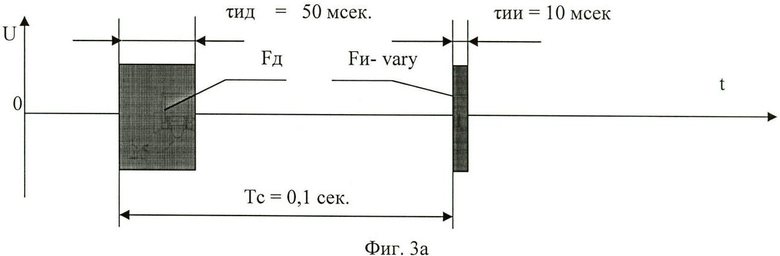
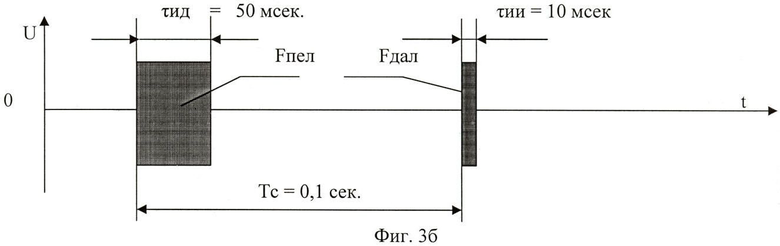
Фиг.3. Временные диаграммы сигналов «ЗАПРОС» (фиг.3а) и «ОТВЕТ» (фиг.3б) донных гидроакустических приемоответчиков.
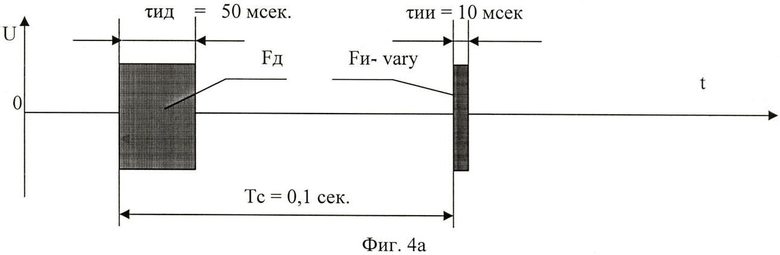
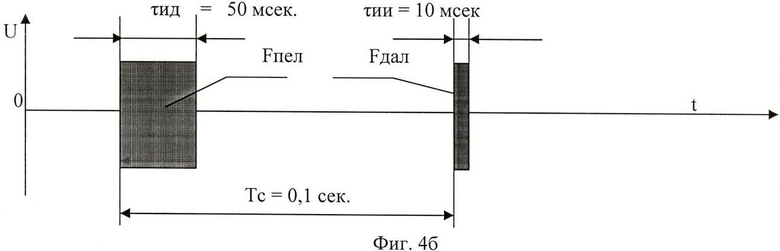
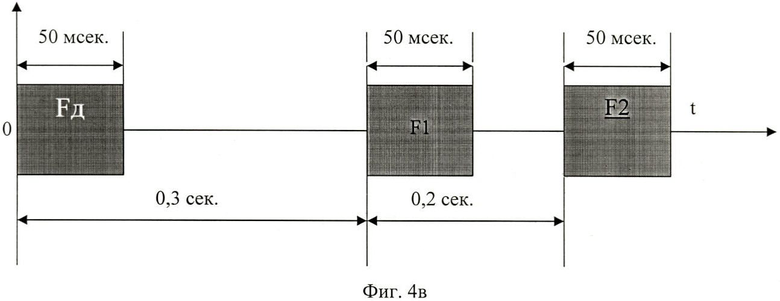
Фиг.4. Временные диаграммы сигналов «ЗАПРОС» (фиг.4а), «ОТВЕТ» (фиг.4б), «ВСПЛЫТИЕ» (фиг.4в) гидроакустических маяков-пингеров.
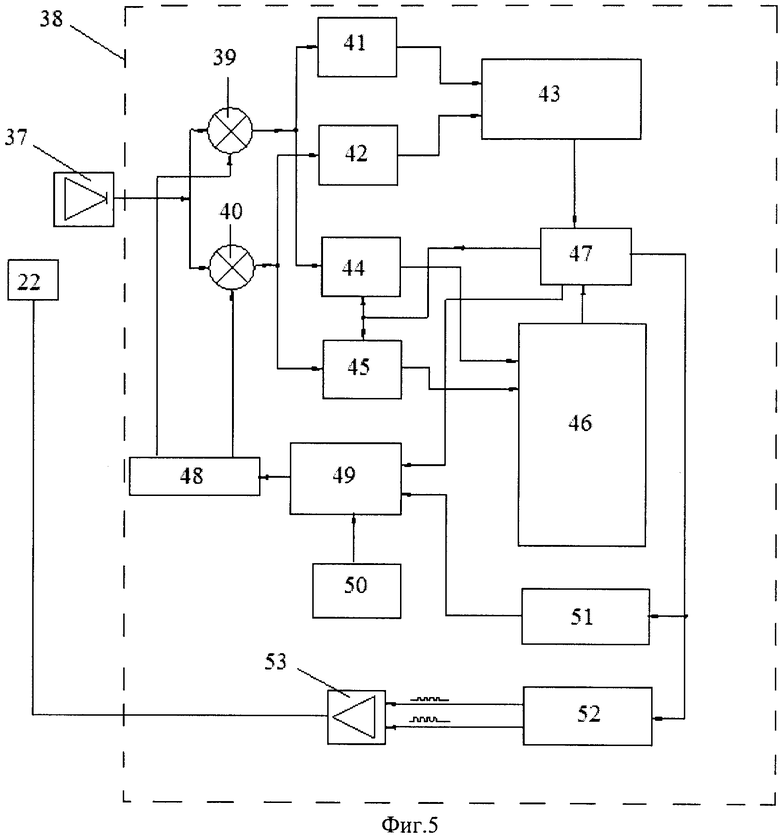
Фиг.5. Функциональная схема приемника акустических сигналов 2. Приемник акустических сигналов 2 состоит из усилителя-ограничителя 37, предназначенного для усиления и нормирования сигнала, поступающего на вход приемника с антенны донного приемопередатчика, двухканальной схемы квадратурного детектирования и фильтрации 38, состоящей из перемножителей 39 и 40, ФНЧ 41 и ФНЧ 42 схем 43 принятия решения о наличии Fд - один канал, ФН 44, ФНЧ 45 и схемы 46 принятия решения о наличии Fи - другой канал, декодера 47 гидроакустических сигналов (декодера команд), фазовращателя 48, переключателя опорных частот 49, генератора 8192 Гц - 50, синтезатора частот 51, формирователя 52 сигнала "ответ", усилителя мощности 53, с которого сигнал через излучающую антенну 22 транслируется через гидросферу к донным гидроакустическим приемоответчикам 11, 12, 1м и гидроакустическим маякам-пингерам 1п.
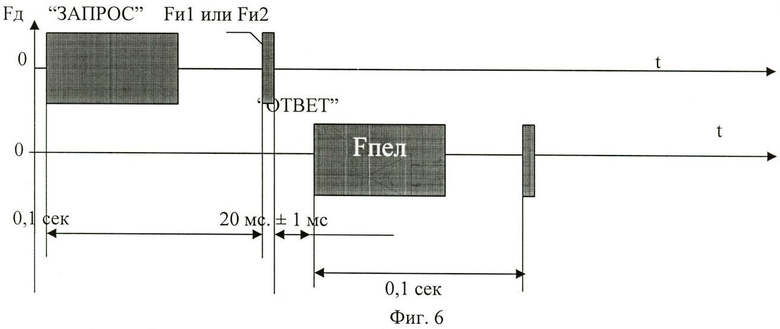
Фиг.6. Временные диаграммы приемника акустических сигналов в режиме "запрос-ответ".
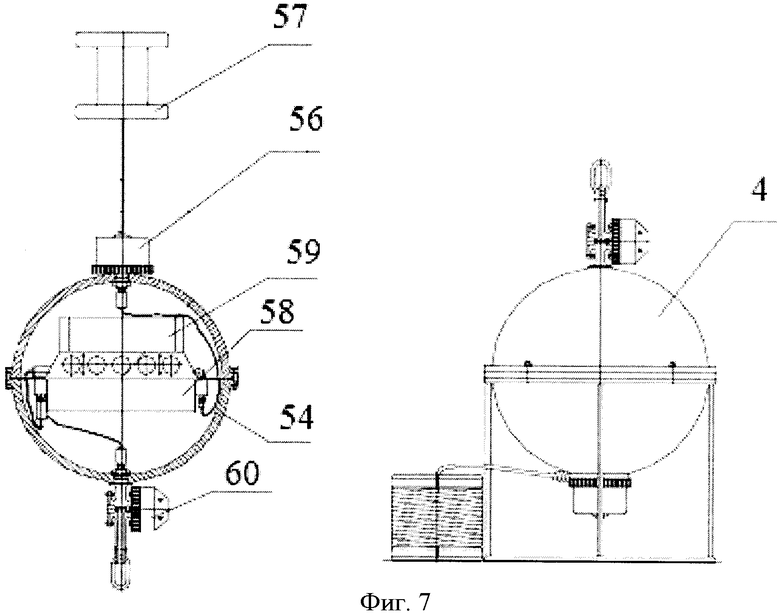
Фиг.7. Конструкция гидроакустического маяка-пингера. Гидроакустический маяк-пингер 1п состоит из корпуса 54 сферической формы, на котором установлена антенна излучателя 56, буй 57 с нулевой плавучестью, в котором установлена антенна приемоиндикатора спутниковой навигационной системы, блок электроники 58, блок питания 59, размыкатель 60 якоря-балласта 61, гидрофоны 62.
Заявляемое техническое решение предназначено для определения координат подводных объектов различного типа и назначения относительно различных типов гидроакустических приемоответчиков (маяков-ответчиков) в режиме с ультракороткой базой.
Такими подводными объектами могут быть автономные и буксируемые подводные аппараты, различные подводные научно-исследовательские приборы и станции, устройства и механизмы, обеспечивающие разведку и добычу полезных ископаемых, обследование подводных магистральных трубопроводов и морских объектов хозяйственной деятельности, имеющих конструктивные элементы и механизмы, расположенные на нескольких горизонтах по глубине, и может быть использовано при проведении океанографических и геологических исследованиях, добыче полезных ископаемых и других видах подводных работ преимущественно в локальных зонах.
Излучатель 22 и гидрофоны 25 образуют общую гидроакустическую приемопередающую антенну, которая предназначена для работы в составе гидроакустической навигационной системы с ультракороткой базой (ГАНС-УКБ). Гидроакустическая приемопередающая антенна предназначена для излучения и приема акустических сигналов для последующего определения положения акустического маяка в определенном диапазоне дальностей относительно географических координат и может быть выполнена в трех вариантах в зависимости от типа подводных аппаратов. Для подводных аппаратов типа «Мир» и «Звук-6» с диапазоном дальностей действия антенн до 8000 м, подводного аппарата типа «Мезоскан-М» до 3000 м (аппараты типа Мезоскан-М) и для подводных аппаратов типа «Гном» и «Микросаунд» до 500 м соответственно.
В состав гидроакустической приемопередающей антенны входят многоканальная система приема, усилитель мощности, микроконтроллерный модуль управления и связи.
Гидроакустическая приемопередающая антенна обеспечивает излучение и прием сигналов, формат которых соответствует параметрам одного из маяков-ответчиков типа «МО-Д», «ГМО-6000», «ГМО-2000», «ГМО-200» и обеспечивает эквивалентную угловую точность не хуже 0.03° в режиме дальнего действия и 0.3° в режиме ближнего действия.
Датчик ориентации 20 представляет собой высокоточный инерциальный датчик типа гирокомпаса для измерения наклонов и курса гидроакустической приемопередающей антенны. В конкретной технической реализации применен датчик типа «U-PHINS» фирмы IXSEA. Аналогичные датчики ориентации 20 установлены на донных гидроакустических приемоответчиках, гидроакустических маяках-пингерах.
Датчик скорости звука представляет собой циклический скоростемер, представляющий собой замкнутое через воду акустическое кольцо синхронизации, образованное двумя акустическими преобразователями, усилителем и импульсным генератором, запускаемым по сигналам с выхода усилителя (1. Гусев М.Н., Яковлев Г.В. Гидроакустические доплеровские лаги // Судостроение за рубежом, 1976, №5, с.53-57. 2. Судовые измерители скорости / А.А.Хребтов, В.Н.Кошкарев и др. - Судостроение, 1978, с.133).
Датчик гидродинамического давления 19 представляет собой датчик, аналогом которого является датчик давления, приведенный в описании к патенту RU №2328757.
Каждая антенна 33 приемоиндикатора 17 спутниковой навигационной системы снабжена спутниковым радиоканалом типа «Sea Tooth». Для подъема антенны 33 спутникового радиоканала на поверхность может быть использована, например, морская лебедка типа «Лерок» или положительная плавучесть типа аварийного буя, применяемого на подводных лодках с установленными на них датчиками наклона и длины вытравленного троса.
На гидроакустическом маяке-пингере 1п также установлены приемопередающая гидроакустическая антенна, предназначенная для преобразования акустических сигналов в электрические и преобразования электрических сигналов в акустические и блок электроники.
Вычислитель 7 координат объекта реализован на основе ПЭВМ PC/AT фирмы IBM с соответствующим программным обеспечением, а также на основе микропроцессора, обеспечивающего ввод-вывод информации и преобразование сигналов от всех регистрирующих и измерительных устройств гидроакустической навигационной системы типа микропроцессора семейства A8rR фирмы АТМЕС.
Схема размещения гидрофонов 25 (приемников) антенны для приема гидроакустических сигналов включает стальную плиту 35, кронштейн 36 перфорированный, расположенные во взаимно перпендикулярных плоскостях, на которых размещены гидрофоны 25 с образованием центрального массива гидрофонов 25 и установленные на стальной плите 6, а крайние гидрофоны, расположены по осям Х и Y на кронштейне 36 перфорированном. На кронштейне 36 перфорированном, также в установлены датчики определения скорости звука 18, гидродинамического давления 19 и ориентации 20 и излучатель 22.
В состав блока электроники 23 входят
- приемно-усилительное устройство, предназначенное для приема и усиления сигналов "ЗАПРОС", переданных с подводного объекта по гидроакустическому каналу связи;
- декодер сигнала "ЗАПРОС", который осуществляет декодирование сигнала "ЗАПРОС" и определяет момент прихода сигнала "ЗАПРОС";
- формирователь сигнала "ОТВЕТ", который предназначен для формирования сигнала "ОТВЕТ" после приема сигнала "ЗАПРОС";
- усилитель мощности, предназначенный для усиления до необходимого уровня сигнала "ОТВЕТ" с целью его передачи по гидроакустическому каналу связи;
- усилитель мощности, предназначенный для усиления до необходимого уровня сигнала «ВСПЛЫТИЕ» с целью передачи его по гидроакустическому каналу связи на маяк-прингер.
- блок питания, который обеспечивает электропитанием все электронные узлы блока электроники.
Блок электроники 23 размещен в прочном корпусе, который защищает его от воздействия гидростатического давления.
Донные гидроакустические приемоответчики устанавливаются по трассе или в районе выполнения исследовательских работ посредством подводных объектов, и их количество определяется масштабами проводимых исследований. Предлагаемая конструкция приемопередающей гидроакустической антенны позволяет осуществлять подводную навигацию при наличии двух маяков приемоответчиков. Определение координат места подводного объекта осуществляется аналогично известным способам и устройствам, приведенным в описаниях к патентам RU №2365939 (Способ навигации подводного объекта) и RU №2371738 (Гидроакустическая навигационная система). Навигация подводного объекта навигации относительно донных гидроакустических приемоответчиков и гидроакустических маяков-пингеров может осуществляеться как в режиме длинной базы (ДБ), ультракороткой базы (УКБ), так и в комбинированном режиме ДБ/УКБ. При этом подводный объект оснащается соответствующими режиму работы гидроакустическими приемопередающими антеннами, навигационным контроллером и программно-математическим обеспечением.
При обеспечении навигации подводного объекта на глубинах более 1 км используют частоты в диапазоне от 8 до 15 КГц, при этом энергетическая дальность связи с маяком приемоответчиком будет достигать 10-14 км, а погрешность определения координат подводного объекта составит 7-10 м в режиме ДБ и 0,3% от дальности в режиме УКБ и 0,5 градусов в режиме пеленгации. При рабочей глубине менее одного километра, целесообразно использовать рабочие частоты в диапазоне 25-35 кГц и работать в режиме УКБ. При этом максимальная дальность связи будет достигать порядка 3 км.
Каждый сигнал маяка приемоответчика имеет специальный формат и кодировку и несет в себе информацию о географических координатах, его индивидуальном номере. Наиболее оптимальная дальность связи в режиме УКБ при глубине погружения до 500 м - 1 км. Точность определения координат до 5 м.
Устройство в части обеспечения позиционирования подводного объекта представляет собой гидроакустическую навигационную систему с комбинированной системой гидроакустической навигации с длинной и ультракороткой базами, которая позволяет использовать режим пеленгации и обеспечить решение задачи выхода подводного объекта в точку установки маяка приемоответчика по трассе выполняемых работ. При этом гидроакустическая антенна маяков приемоответчиков как и подводного объекта представляет две имеющие общий центр базы и состоит из такого же количества приемников.
При этом, когда все гидрофоны производят прием на одной и той же рабочей частоте, реализуется режим определения задержки и направления прихода отклика от фиксированного маяка приемоответчика в режиме ультракороткой базы, а когда каждый из гидрофонов настроен на свою рабочую частоту, осуществляется режим измерения задержек от двух или нескольких донных маяков приемоответчиков в режиме длинной базы.
Диапазон рабочих глубин маяков приемоответчиков от 200 до 6000 м, наклонная дальность действия ГАНС-УКБ составляет от 20 до 8000 м, в зависимости от назначения подводного объекта. Диапазон рабочих частот для дальности связи до 500 м составляет 30-50 кГц, а для дальности связи до 8000 м составляет 7-14 кГц.
Режимы работы маяков приемоответчиков «ЗАПРОС-ОТВЕТ».
В этом режиме принимается сигнал запроса и излучает сигнал ответа. Запрос производится по гидроакустическому каналу связи, запрос адресный. Адрес определяется своей частотой запроса.
Диапазон частот сигнала "ЗАПРОС" - от 7 кГц до 10 кГц. Диапазон частот сигнала "ОТВЕТ" - от 10 кГц до 14 кГц. Формат сигнала "ЗАПРОС" - пачка из двух импульсов, каждый из которых заполнен своей частотой. Частота заполнения первого импульса 8192 Гц. Частота заполнения второго импульса находится в диапазоне от 9 кГц до 10 кГц. Длительность первого импульса 50 мс ± 1 мс, второго 10 мс ± 0,02 мс. Период следования 100 мс.
Первый импульс выводит маяк из "спящего" режима. По второму импульсу регистрируется время прихода сигнала и определяется адрес маяка.
Формат сигнала "ОТВЕТ" - пачка из двух импульсов, каждый из которых заполнен своей частотой. Частота заполнения первого импульса находится в диапазоне от 10 кГц до 11,5 кГц. Частота заполнения второго импульса находится в диапазоне от 11,5 кГц до 14 кГц. Длительность первого импульса 50 мс ± 1 мс, второго 10 мс ± 0,02 мс мс. Период следования 100 мс.
Первый импульс используется для измерения направления. Второй импульс используется для измерения дальности.
Сигналы "ОТВЕТ" одинаковые для каждого из маяков.
Среднеквадратическая погрешность регистрации времени прихода сигнала "ЗАПРОС" по гидроакустическому каналу - 2 мсек, при уровне шумового давления в зоне расположения маяка в полосе 1 Гц на частоте 1 кГц - не более 0,1 Па.
Вероятность пропуска сигнала "ЗАПРОС" при уровне шумового давления 0,1 Па в полосе 1 Гц на частоте 1 кГц, Рпр - 10-4, не более.
Чувствительность приемника не хуже 100 дБ относительно 1 мкПа на расстоянии 1 м. Уровень акустического давления, создаваемый приемоизлучающей антенной в рабочей полосе частот, должен быть не менее 190 дБ относительно 1 мкПа на расстоянии 1 м. Диаграмма направленности приемоизлучающей антенны - однонаправленная. Ширина диаграммы направленности по уровню 0,707 в рабочей полосе частот - ±45°±5°.
Чувствительность на прием на частотах от 7 кГц до 10 кГц - 300 мкВ/Па, не менее.
Чувствительность на передачу в диапазоне частот от 10 кГц до 13,5 кГц - 4,5 Па/В, не менее.
Параметры сигнала "ЗАПРОС", передаваемого по гидроакустическому каналу связи (фиг.3а):
пачка из двух импульсов, заполненных несущими частотами Fд (дежурный) и Fи1 или Fи2 (измерительный);
длительность первого импульса τид - 50 мс ± 1 мс;
длительность второго импульса τии - 10 мс ± 0,02 мс;
период следования первого и второго импульсов Tc - 0,1 сек;
частота заполнения первого импульса Fд - 8192 Гц;
частота заполнения второго импульса Fи1 - 8474 Гц;
частота заполнения второго импульса Fи2 - 8928 Гц.
Параметры сигнала "ОТВЕТ" (фиг.3б):
- пачка из двух импульсов, заполненных несущими частотами Fп (пеленг) и Fдал (дальность);
длительность первого импульса τид - 50 мс ± 1 мс;
длительность второго импульса τии - 10 мс ± 0,02 мс;
период следования первого и второго импульсов Tc - 0,1 сек;
частота заполнения первого импульса Fпел - 10000 Гц;
частота заполнения второго импульса Fдал - 10416 Гц.
Акустический запрос производится через усилитель мощности пьезокерамическим излучателем 22. Ответные сигналы принимаются центральным массивом гидрофонов, производится их усиление, фильтрация, выделение квадратур, оцифровка и обработка посредством вычислителя координат 7 подводного объекта. На вычислитель координат 7 также поступает информация со всех датчиков гидродинамического давления 19, скорости определения звука 18 и датчиков ориентации 20. Поступающая с них информация во время каждого цикла приема ответов присоединяется к пакету акустической информации. В дальнейшем при окончательной обработке зарегистрированных и измеренных данных в вычислителе координат 7 используют информацию от приемоиндикатора 33 навигационной спутниковой системы GPS, рассчитываются точные географические координаты местоположения подводного объекта.
При этом измеренное время пробега пересчитывается с учетом профиля скорости звука в наклонную дальность, а направление прихода волны на поверхность антенны с учетом наклонов и азимута самой антенны позволяет определить точку, из которой излучение звука было произведено. Измерение времени пробега производится путем анализа формы принятого звукового сигнала, при этом точность измерения времени определяется шириной полосы приемного тракта и отношением сигнал/шум. Определение направления прихода звуковой волны производится путем измерения разности фаз сигналов, принятых разными гидрофонами, с последующим пересчетом разности фаз в геометрические углы с учетом характерной длины волны акустического сигнала и пространственного разнесения приемников. Точность измерения направления при этом определяется дистанцией между приемниками и отношением сигнал/шум. Точность измерения времени пробега или, другими словами, точность определения положения объекта вдоль луча, не зависит от расстояния (при достаточно высоком уровне сигнала по сравнению с шумами) и для традиционных систем дальнего действия составляет доли метра. При фиксированном угловом разрешении ошибка измерения положения объекта поперек луча линейно увеличивается с дистанцией и, как правило, характеризуется в процентном отношении к наклонной дальности.
Антенны 17 приемоиндикатора 33 навигационной спутниковой системы GPS размещают на блоке счетчике 32 кабель-троса 29, снабженного датчиком уклонов 29 и соединенного с буксируемой приемной акустической антенной 14. Аналогичная конструкция соединения применяется и в случае, когда объект подводной навигации является буксируемым подводным аппаратом и сочленен с судном-буксировщиком.
Часть кабеля-троса 29, которая крепится к подводному объекту, размещается в дышле 3 и вместе с карданом 28 служит в качестве элементов крепления. Груз котировочный 27, обтекатель 34 и стабилизаторы гидродинамические предназначены для обеспечения мореходных качеств подводного объекта навигации.
Антенны 17 приемоиндикатора 33 навигационной спутниковой системы GPS также размещают на гидроакустическом маяке-пингере 1п, который может быть перемещен на другой горизонт глубины или в приповерхностный водный слой путем отцепления якоря-балласта, прикрепляемого к его корпусу посредством строп и электрохимического размыкателя по команде «ВСПЛЫТИЕ».
Количество устанавливаемых гидроакустических маяков-пингеров определяется задачами и объемом решаемых исследований. Минимальное количество маяков, устанавливаемых в зоне действия ГАНС-УКБ, относительно которых производятся контрольные измерения, - 2.
Режимы работы гидроакустического маяка-пингера 1п:
- "ЗАПРОС"-"ОТВЕТ", в этом режиме гидроакустический маяк-пингер принимает сигнал запроса и излучает сигнал ответа.
- "ВСПЛЫТЬ", в этом режиме гидроакустический маяк-пингер принимает команду на всплытие и подает сигнал на электрохимический размыкатель и размыкающий механизм, выполненный в виде строп с приводом и отделяющий якорь-балласт.
Запрос гидроакустического маяка-пингера адресный. Адрес определяется своей частотой запроса.
Диапазон частот сигнала "ЗАПРОС" и команды "ВСПЛЫТЬ" - от 7 кГц до 10 кГц. Диапазон частот сигнала "ОТВЕТ" - от 10 кГц до 14 кГц. Формат сигнала "ЗАПРОС" - пачка из двух импульсов, каждый из которых заполнен своей частотой. Частота заполнения первого импульса 8192 Гц. Частота заполнения второго импульса находится в диапазоне от 9 кГц до 10 кГц. Длительность первого импульса 50 мс ± 1 мс, второго 10 мс ± 0,02 мс. Период следования 100 мс.
Первый импульс выводит гидроакустический маяк-пингер из "спящего" режима. По второму импульсу регистрируется время прихода сигнала и определяется адрес гидроакустического маяка-пингера. Формат сигнала "ВСПЛЫТЬ" - пачка из трех импульсов, каждый из которых заполнен своей частотой. Частота заполнения первого импульса 8192 Гц. Частоты заполнения второго и третьего импульсов находятся в диапазоне от 7 кГц до 10 кГц.
Длительность первого импульса 50 мс ± 1 мс, второго 50 мс ± 1 мс, третьего 50 мс ± 1 мс. Период между первым и вторым 300 мс, между вторым и третьем импульсами 200 мс. Первый импульс выводит МО-Д из "спящего" режима.
Формат сигнала "ОТВЕТ" - пачка из двух импульсов, каждый из которых заполнен своей частотой. Частота заполнения первого импульса находится в диапазоне от 10 кГц до 11,5 кГц. Частота заполнения второго импульса находится в диапазоне от 11,5 кГц до 14 кГц. Длительность первого импульса 50 мс ± 1 мс, второго 10 мс ± 0,02 мс. Период следования 100 мс.
Первый импульс используется для измерения направления. Второй импульс используется для измерения дальности.
Сигналы "ОТВЕТ" одинаковые для каждого из гидроакустических маяков-пингеров.
Среднеквадратическая погрешность регистрации времени прихода сигнала "ЗАПРОС" - 1 мсек, при уровне шумового давления в зоне расположения маяка-пингера в полосе 1 Гц на частоте 1 кГц не более 0,1 Па.
Вероятность пропуска сигнала "ЗАПРОС" при уровне шумового давления 0,1 Па в полосе 1 Гц на частоте 1 кГц, Рпр - 10-4, не более.
Вероятность ошибки при приеме команды "ВСПЛЫТЬ" при аддитивной помехе и отношении сигнал/шум, равным 10, не более Рош - 0,5-10-6.
Чувствительность приемника не хуже 100 дБ относительно 1 мкПа на расстоянии 1 м.
Уровень акустического давления, создаваемый приемоизлучающей антенной в рабочей полосе частот, должен быть не менее 190 дБ относительно 1 мкПа на расстоянии 1 м.
Диаграмма направленности приемоизлучающей антенны - верхняя полусфера.
Чувствительность на прием на частотах от 7 кГц до 10 кГц - 200 мкВ/Па, не менее.
Чувствительность на передачу в диапазоне частот от 10 кГц до 13,5 кГц - 4,5 Па/В не менее.
Автономность гидроакустического маяка-пингера в "спящем" режиме - 12 месяцев, не менее.
Количество ответов - 100000, не менее.
Источник питания - алкалиновые элементы типа LR20, напряжением 27 В, емкостью 16 А·ч, не менее.
Размыкатель якорь-балласта электрохимический, при этом тип привода - электромагнитный; сопротивление обмотки соленоида - 4 Ом; минимальный ток срабатывания - 2,5 А; управление - импульсное; минимальная длительность импульса при минимальном токе - 500 мсек.
Конструктивно гидроакустический маяк-пингер выполнен в виде сферы из алюминиевого сплава диаметром 350 мм, обеспечивающей работу на глубинах до 6000 м.
Положительная плавучесть не менее 4 кг. Диапазон рабочих температур - от 0° до +40°С.
Назначение режимов работы гидроакустического маяка-пингера и параметры сигналов, им соответствующие.
Режим "ЗАПРОС-ОТВЕТ". В этом режиме один из двух гидроакустических маяков-пингеров принимает адресный гидроакустический сигнал "ЗАПРОС", переданный с подводного объекта навигации или с обеспечивающего судна. Адрес гидроакустического маяка-пингера определяется частотой заполнения второго импульса. Затем маяк-прингер, которому был передан сигнал "ЗАПРОС", посылает сигнал "ОТВЕТ". Частоты ответа одинаковые для каждого из двух гидроакустических маяков-пингеров.
Параметры сигналов "ЗАПРОС":
пачка из двух импульсов, заполненных несущими частотами Fд (дежурный) и Fи1 или Fи2 (измерительный);
длительность первого импульса τид - 50 мс ± 1 мс;
длительность второго импульса τии - 10 мс ± 0,02 мс;
период следования первого и второго импульсов Tc - 0,1 сек;
частота заполнения первого импульса Fд - 8192 Гц;
частота заполнения второго импульса Fи1 - 7462 Гц;
частота заполнения второго импульса Fи2 - 8064 Гц.
Временная диаграмма команды представлена на фиг.4а.
Параметры сигналов "ОТВЕТ":
- пачка из двух импульсов, заполненных несущими частотами Fпел (пеленг) и Fдал (дальность);
длительность первого импульса τид- 50 мс ± 1 мс;
длительность второго импульса τии - 10 мс ± 0,02 мс;
период следования первого и второго импульсов Тс - 0,1 сек;
частота заполнения первого импульса Fпел - 10000 Гц;
частота заполнения второго импульса Fдал - 10416 Гц.
Временная диаграмма команды представлена на фиг.4б. Команда "ВСПЛЫТЬ". Эта команда используется для перемещения гидроакустического маяка-пингера со дна на другой горизонт глубины со дна водоема.
Перед началом команды передается импульс Fд, аналогичный сигналу "ЗАПРОС". Затем через 0,3 сек следует команда, представляющая собой пачку из двух импульсов, каждый из которых заполнен своей несущей частотой. Частота заполнения первого импульса F1 и одинакова для всех гидроакустических маяков-пингеров, а второго F2 меняется в диапазоне от 7 кГц до 9 кГц. Период между импульсами равен 0,2 сек. Временная диаграмма команды представлена на фиг.4в. Частота заполнения Fд=8192 Гц. Частота заполнения F1=8333 Гц. Частота заполнения F2 меняется и составляет 7462 Гц и 8064 Гц. Она состоит из следующих основных узлов:
усилителя-ограничителя, предназначенного для усиления и нормирования сигнала, поступающего на вход приемника с антенны ГМО-6000 и ГМО-2000;
двухканальной схемы квадратурного детектирования и фильтрации, состоящей из перемножителей П1 и П2, ФНЧ1, ФНЧ2 и схемы принятия решения о наличии Fд - один канал, ФНЧ3, ФНЧ4 и схемы принятия решения о наличии Fи - другой канал;
- декодера гидроакустических сигналов (декодера команд);
фазовращателя;
переключателя опорных частот;
генератора 8192 Гц;
синтезатора частот;
формирователя сигнала "ответ";
усилителя мощности.
Приемник ГМО-6000 и ГМО-2000 выполнен по схеме оптимального квадратурного обнаружителя радиоимпульса со случайной фазой, который позволяет максимизировать отношение сигнал/шум и тем самым улучшить качество приема, повышая точность измерения дальности.
В отсутствие полезного сигнала приемник находится в дежурном режиме. На входы перемножителей П1 и П2 с фазовращателя поступают непрерывные опорные напряжения Uoп с частотой Fo, равной частоте заполнения первого импульса сигнала "ЗАПРОС" Fд=8192 Гц, сдвинутые по фазе относительно друг друга на 90°. В это время включены только ФНЧ1 и ФНЧ2 для приема дежурного импульса Fд. Полоса пропускания этих ФНЧ соответствует длительности импульса 50 мсек. Ток потребления в этом режиме минимален и составляет не более 500 мкА.
Схема принятия решения о наличии сигнала Fд постоянно анализирует по заданному алгоритму выходные напряжения ФНЧ1 и ФНЧ2 [Us(t) и Uc(t) соответственно]. Если после прихода первого импульса (дежурного) с частотой Fд величины напряжений Us(t) и Uc(t) будут удовлетворять заданному критерию принятия решения, схема сообщит об этом декодеру команд, подав на его вход импульс, фронт которого соответствует моменту появления полезного сигнала на входе приемника ГМО-6000 и ГМО-2000. Декодер, зафиксировав появление этого импульса, "пробуждает" микроконтроллер и дает команду схеме переключения опорных частот выключить Uoп и включить ФНЧ3 и ФНЧ4 для приема импульса Fи. Полоса пропускания этих фильтров соответствует импульсу 10 мсек для ГМО-6000 и 5 мс для ГМО-2000. На входы перемножителей П1 и П2 в это время поступает напряжение, равное 0, и прием не производится. Через 0,075 сек после приема первого импульса декодер дает разрешение схеме переключения опорных частот включить опорные напряжения Uoп с частотой, равной частоте заполнения второго импульса сигнала "ЗАПРОС" Fи1 или Fи2. Затем приемник ожидает его приход. Если через 0,1 сек от начала первого импульса был принят второй Fи1 или F2, то через 20 мсек после его приема декодер выключает Uoп и дает команду формирователю сигнала "ОТВЕТ" сформировать и передать на судно ответный сигнал. После этого на 8 секунд отключается приемник и прием сигналов не ведется. По истечении этого времени декодер переводит приемник в дежурный режим. Временные диаграммы, позволяющие более наглядно представить различные режимы работ ГМО-6000 и ГМО-2000, приведены на фиг.4.
Блок-схема электронной части МО представлена на фиг.5.
Она состоит из следующих основных узлов:
усилителя-ограничителя, предназначенного для усиления и нормирования сигнала, поступающего на вход приемника с антенны МО-Д;
двухканальной схемы квадратурного детектирования и фильтрации, состоящей из перемножителей П1 и П2, ФНЧ1, ФНЧ2 и схемы принятия решения о наличии Fд, F1 и F2 - один канал, ФНЧ3, ФНЧ4 и схемы принятия решения о наличии Fи - другой канал;
- декодера гидроакустических сигналов (декодера команд);
фазовращателя;
переключателя опорных частот;
генератора 8192 Гц;
синтезатора частот;
формирователя сигнала "ответ";
усилителя мощности.
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических приемоответчиков работает следующим образом.
Расположенный на объекте навигации первый генератор синхроимпульсов 8 запускает передатчик 2 акустических импульсов на частоте запроса f0 и обнуляет счетчики М измерителей 4m времени распространения акустических сигналов до приемоответчика и обратно в каждом канале. Акустические сигналы, распространяясь в водной среде, принимаются приемоответчиками 1m, переизлучаются обратно и принимаются первым М-канальным приемником 3 акустических сигналов ответа на рабочих частотах fm 3. Усиленные приемником 3 сигналы с выхода каждого из каналов поступают на запирающий вход каждого из измерителей 4m времени распространения и запирают своим передним фронтом интегратор импульсов-меток времени генератора синхроимпульсов 8, а информация о числе накопленных меток времени передается в цифровом виде от каждого интегратора в соответствующие блоки 6mn преобразования временных интервалов в дистанции по N в каждом m-м канале. Различные блоки 6mn преобразования одного и того же m-го канала отличаются значениями коэффициентов, характеризующих тип лучевой траектории в алгоритме пересчета времени распространения в наклонную дистанцию. Найденные в блоках 6mn значения наклонных дистанций поступают на входы блоков 5m выбора максимального значения дистанций, а максимальные значения дистанций с выходов блоков 5m поступают на первый вход вычислителя 7 координат объекта навигации. По аналогичной схеме и хорошо известным методикам [1] определяются координаты приемоответчиков и механически связанных с ними гидроакустических маяков-пингеров по известным координатам объекта навигации в режиме калибровки навигационной базы. Если объект навигации находится в пределах дальности действия первой подсистемы, то его координаты определяются первой подсистемой.
В то же самое время синхронно работающие генераторы синхроимпульсов 9m гидроакустических маяков-пингеров запускают передатчики 10m гидроакустических маяков-пингеров, которые в свою очередь подают импульсы возбуждения на гидроакустические излучатели 11m гидроакустических маяков-пингеров, а расположенный на объекте навигации второй генератор синхроимпульсов 12 обнуляет счетчики импульсов-меток времени измерителей 15m времени распространения акустических сигналов от гидроакустических маяков-пингеров до объекта навигации. Излученные гидроакустическими маяками-пингерами акустические сигналы с рабочими частотами Fm распространяются в водной среде и принимаются расположенной на объекте навигации буксируемой приемной акустической антенной 13, с выхода которой они поступают на вход второго М-канального приемника 14. Усиленные приемником 14 акустические сигналы поступают на запирающий вход соответствующих измерителей 15m времени распространения акустических сигналов от гидроакустических маяков-пингеров до объекта навигации, а информация о времени распространения в цифровом виде передается в дополнительные блоки 16m преобразования временных интервалов в дистанции. Вычисленные в блоках 16m дистанции поступают в вычислитель 7 координат объекта навигации.
Информация об акустических параметрах пограничных сред границы раздела вода - морское дно регистрируется непрерывно и вводится в дополнительные блоки 16m преобразования временных интервалов в дистанции. Информация о географических координатах маяков-ответчиков и связанных с ними гидроакустических маяков-пингеров, полученная в процессе калибровки навигационной системы, а также полученная по спутниковому каналу, вводится в вычислитель координат объекта навигации.
Для повышения надежности определения координат подводного объекта существуют два метода повышения точности гидроакустических систем. Это увеличение пространственного разнесения приемников и увеличение отношения сигнал/шум.
Исследование структурных и функциональных схем известных систем показало, что практически во всех известных технических решениях используются приемные антенны сравнительно небольших размеров - менее полуметра. В то же время, увеличение разнесения гидрофонов до 1-1,5 м позволит пропорционально увеличить угловую точность приемопередающей гидроакустической антенны при фиксированном отношении сигнал/шум.
Увеличение отношения сигнал/шум достигается увеличением мощности сигнала и снижением уровня шума. Как правило, в источниках анализируемых звуковых сигналов для приемных антенн используются пьезокерамические излучающие элементы, работающие на пределе излучаемой мощности, поэтому единственным способом усиления сигнала является увеличение его энергии за счет увеличения длительности. Увеличение длительности в тональном режиме приводит к снижению точности измерения времени пробега акустической волны и тем самым к ухудшению характеристик навигации в целом. Единственным реальным способом увеличения энергии сигнала без ухудшения разрешающей способности системы по дальности является использование сложных сигналов. Однако использование сложных сигналов требует, с одной стороны, значительного повышения производительности процессоров в транспондерах и бортовых системах, а, с другой, сокращает время жизни акустических ответчиков в автономном режиме при фиксированном ресурсе источников питания.
Существует ряд способов снижения уровня акустических помех на приемнике. Окружающий шум в точке приема имеет сложный частотный и пространственный спектры, и его эффективный уровень может быть снижен за счет ограничения чувствительности приемников в областях, заведомо не содержащих полезной информации. Ограничение чувствительности в частотной области достигается оптимальной фильтрацией сигналов, ограничение чувствительности в пространственной области - пассивным или активным формированием диаграммы направленности. Пассивное формирование достигается применением отражающих и заглушающих элементов в конструкции антенны, которые ослабляют звуковые волны с нежелательных направлений. Такой способ применяется в большинстве известных УКБ систем и является весьма эффективным и относительно дешевым, однако не позволяет максимально сузить пространственный спектр анализируемого сигнала и добиться минимально возможного уровня шума. Активное формирование направленности достигается использованием многоэлементных фазируемых решеток и применяется, например, в системе HIPAP-500 компании Kongsberg. Этот способ формирования диаграммы приема дает наилучшие результаты, однако реализация антенн такого типа является очень сложной и дорогостоящей задачей. В предлагаемом техническом решении увеличение точности навигации подводного объекта достигается за счет пространственного разнесения гидрофонов на максимальное технически допустимое расстояние с формированием диаграммы направленности, близкой к равномерной в активном полупространстве.
Практическая реализация заявляемого технического решения основана на теоретическом принципе построения предложенной гидроакустической системы подводной навигации с ультракороткой базой.
Таким образом, обе подсистемы, работая независимо с частотным разделением, обеспечивают определение координат объекта навигации на малых и больших расстояниях с минимальной погрешностью.
Источники информации
1. Патент RU №2084924.
2. Патент RU №2084923.
3. Патент RU №2289149.
4. Патент RU №34020 U1.
5. Патент RU №2158431.
6. Патент RU №2308454.
7. Патент RU №203 8127.
8. Авторское свидетельство SU №713278.
9. Патент RU №2365939.
10. Патент RU №2371738.
11. Патент WO №0123908 А1, 05.04.2001.
12. Милн П.Х. Гидроакустические системы позиционирования. - Л.: Судостроение, 1989 г., с.49-60.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2463624C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2010 |
|
RU2451300C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 2007 |
|
RU2353949C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 2004 |
|
RU2289149C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2011 |
|
RU2456634C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2477497C2 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 1995 |
|
RU2084923C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2010 |
|
RU2444759C1 |

Изобретение предназначено для навигационного обеспечения подводных аппаратов различного типа. Гидроакустическая синхронная дальномерная навигационная система, содержащая донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа fm (m=1-M), размещенные на объекте навигации генератор синхроимпульсов, акустический передатчик с частотой опроса f0, вход которого соединен с первым выходом генератора синхроимпульсов. М-канальный приемник для приема ответных сигналов с частотами fm, M измерителей времени распространения акустических сигналов до приемоответчика, работающего на частоте этого канала, и обратно, первые входы которых соединены с выходами М канального приемника, а вторые входы соединены с вторым выходом генератора синхроимпульсов, M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения, М блоков выбора максимального значения дистанции, входы которых соединены с выходами N блоков преобразования временных интервалов в дистанции данного канала, вычислитель координат объекта навигации, первый вход которого соединен с выходами М блоков, выбора максимального значения дистанций, дополнительную вторую донную навигационную базу из М гидроакустических маяков-ответчиков с различными частотами излучения Fm (m=1-M), механически связанных с соответствующими М маяками-ответчиками, содержащих М синхронно работающих генераторов синхроимпульсов, М передатчиков с различными рабочими частотами Fm, входы которых соединены с выходами генераторов синхроимпульсов, М гидроакустических излучателей с рабочими частотами Fm, входы которых соединены с выходами передатчиков с соответствующими рабочими частотами, на объекте навигации дополнительно размещены второй генератор синхроимпульсов, работающий синхронно с генераторами синхроимпульсов маяков-ответчиков, первый выход которого используется для синхронизации М синхронно работающих генераторов синхроимпульсов гидроакустических маяков-ответчиков перед их установкой на дно, буксируемая приемная акустическая антенна, второй М-канальный приемник для приема акустических сигналов маяков-ответчиков, вход которого соединен с выходом буксируемой приемной акустической антенны, М измерителей времени распространения акустических сигналов от маяков-ответчиков до объекта навигации, первые входы которых соединены с выходами второго М-канального приемника, а вторые входы соединены с вторым выходом второго генератора синхроимпульсов, дополнительные М блоков преобразования временных интервалов в дистанции, входы которых соединены с выходами М измерителей времени распространения акустических сигналов от маяков-ответчиков до объекта навигации, а выходы соединены с вторыми входами вычислителя координат объекта навигации, причем М гидроакустических излучателей маяков-ответчиков и буксируемая приемная акустическая антенна расположены вблизи морского дна на расстоянии не более длины волны на рабочих частотах Fm, a дополнительные М блоков преобразования временных интервалов в дистанции вычисляют искомые расстояния rm через измеренные времена распространения tm, отличается тем, что дополнительная вторая донная навигационная база из М гидроакустических маяков-ответчиков с различными частотами излучения Fm (m=1-M), механически связанных с соответствующими М маяками-ответчиками, также связана электрически с теми же соответствующими М маяками-ответчиками, на объекте навигации установлен приемоиндикатор приема спутниковых сигналов, первая приемная антенна которого установлена на его корпусе, а вторая приемная антенна - на блоке счетчике перемещений кабель-троса, соединяющего объект навигации с буксируемой приемной акустической антенной, и еще n приемных антенн установлены на маяках-ответчиках дополнительной второй донной базы, М гидроакустических приемоответчиков снабжены якорем балластом с гидроакустическим размыкателем, антенна М-канального приемника выполнена цилиндрической формы из М гидрофонов, образующих в горизонтальной плоскости две навигационные базы регистрации акустических сигналов, при этом боковые и тыльное направления заглушены экранами, М маяки-ответчики первой и второй донной базы, объект навигации снабжены датчиками измерения скорости звука в воде, гидродинамического давления, ориентации. Достигаемый технический результат изобретения - увеличение дальности действия без увеличения погрешности определения координат объекта навигации. 7 ил.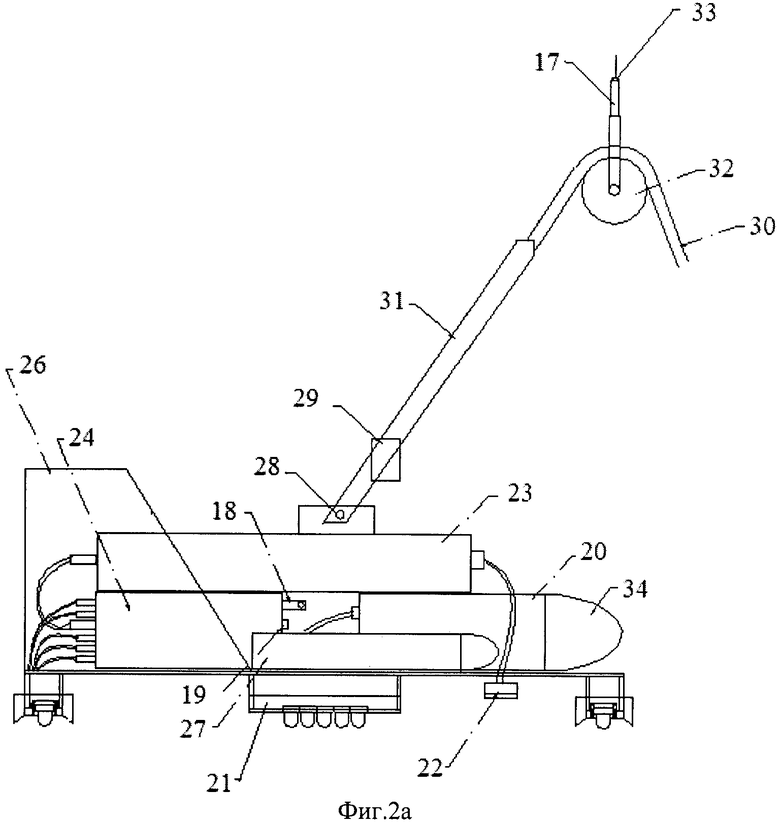
Гидроакустическая синхронная дальномерная навигационная система для позиционирования подводных объектов в навигационном поле произвольно расставленных гидроакустических приемоответчиков, содержащая донную навигационную базу из М гидроакустических приемоответчиков с различными частотами ответа fm (m=1-M), размещенные на объекте навигации генератор синхроимпульсов, акустический передатчик с частотой опроса f0, вход которого соединен с первым выходом генератора синхроимпульсов, М-канальный приемник для приема ответных сигналов с частотами fm, M измерителей времени распространения акустических сигналов до приемоответчика, работающего на частоте этого канала, и обратно, первые входы которых соединены с выходами М канального приемника, а вторые входы соединены с вторым выходом генератора синхроимпульсов, M×N блоков преобразования временных интервалов в дистанции по числу N возможных лучевых траекторий, входы которых соединены с выходами соответствующих измерителей времени распространения, М блоков выбора максимального значения дистанции, входы которых соединены с выходами N блоков преобразования временных интервалов в дистанции данного канала, вычислитель координат объекта навигации, первый вход которого соединен с выходами М блоков выбора максимального значения дистанций, М гидроакустических приемоответчиков снабжены М гидроакустическими маяками-пингерами, образующими дополнительную вторую донную навигационную базу из М гидроакустических маяков-пингеров с различными частотами излучения Fm (m=1-M), механически связанных с соответствующими М гидроакустическими маяками-ответчиками, содержащих М синхронно работающих генераторов синхроимпульсов, М передатчиков с различными рабочими частотами Fm, входы которых соединены с выходами генераторов синхроимпульсов, М гидроакустических излучателей с рабочими частотами Fm, входы которых соединены с выходами передатчиков с соответствующими рабочими частотами, на объекте навигации дополнительно размещены второй генератор синхроимпульсов, работающий синхронно с генераторами синхроимпульсов гидроакустических маяков-пингеров, первый выход которого используется для синхронизации М синхронно работающих генераторов синхроимпульсов гидроакустических маяков-пингеров перед их установкой на дно, буксируемая приемная акустическая антенна, второй М канальный приемник для приема акустических сигналов гидроакустических маяков-пингеров, вход которого соединен с выходом буксируемой приемной акустической антенны, М измерителей времени распространения акустических сигналов от гидроакустических маяков-пингеров до объекта навигации, первые входы которых соединены с выходами второго М канального приемника, а вторые входы соединены с вторым выходом второго генератора синхроимпульсов, дополнительные М блоков преобразования временных интервалов в дистанции, входы которых соединены с выходами М измерителей времени распространения акустических сигналов от гидроакустических маяков-пингеров до объекта навигации, а выходы соединены с вторыми входами вычислителя координат объекта навигации, причем М гидроакустических излучателей гидроакустических маяков-пингеров и буксируемая приемная акустическая антенна расположены вблизи морского дна на расстоянии не более длины волны на рабочих частотах Fm, а дополнительные М блоков преобразования временных интервалов в дистанции вычисляют искомые расстояния rm через измеренные времена распространения tm, отличающаяся тем, что на объекте навигации установлен приемоиндикатор приема спутниковых сигналов, первая приемная антенна которого установлена на его корпусе, а вторая приемная антенна - на блоке-счетчике перемещений кабель-троса, соединяющего объект навигации с буксируемой приемной акустической антенной, и еще n приемных антенн установлены на гидроакустических маяках-пингерах, М гидроакустических приемоответчиков снабжены якорем-балластом с гидроакустическим размыкателем, антенна М-канального приемника выполнена цилиндрической формы из М гидрофонов, образующих в горизонтальной плоскости две навигационные базы регистрации акустических сигналов, М гидроакустических приемоответчиков и маяков-пингеров и объект навигации снабжены датчиками измерения скорости звука в воде, гидродинамического давления, ориентации, вычислитель координат объекта навигации своими входами соединен с выходами блока выбора максимального значения дистанции в М-м канале, приемоиндикатора спутниковых радиосигналов, датчиков измерения гидродинамического давления, скорости звука и ориентации.
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДАЛЬНЕГО ДЕЙСТВИЯ | 2004 |
|
RU2289149C2 |
| Торцефрезный станок для обработки длинномерных деталей | 1949 |
|
SU86321A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2004 |
|
RU2303275C2 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| US 7196971 B2, 27.03.2007 | |||
| СИНТАКСИЧЕСКАЯ СТРУКТУРА ПАРАМЕТРОВ ГИПОТЕТИЧЕСКОГО ЭТАЛОННОГО ДЕКОДЕРА | 2013 |
|
RU2643463C2 |
| US 7315488 B2, 01.01.2008 | |||
| US 4972385 A, 20.11.1990. | |||

