Изобретение относится к областям техники, где для спуска объектов в атмосфере используются парашюты. Оно может быть использовано для безударного приземления возвращаемых космических аппаратов или десантируемых грузов. Предлагаемое устройство обеспечивает мягкую парашютную посадку при исключении негативных воздействий на спускаемый груз и посадочную поверхность.
Неотъемлемым свойством парашютной посадки является наличие вертикальной скорости снижения. Уменьшение величины этой скорости сопряжено с увеличением размера парашюта, объема и массы парашютной системы. Для снижения вертикальной скорости до допустимых значений применяют парашютную систему приемлемой массы и объема, а перед касанием посадочной поверхности вводят в действие специальное тормозное устройство.
Известно четыре основных способа уменьшения вертикальной скорости груза, спускаемого на парашюте, перед касанием посадочной поверхности.
Первый способ заключается в использовании амортизаторов [1] или, например, по заявке РФ №92015245, МПК B64C 25/28. Известны различные конструкции амортизаторов, наиболее простыми являются войлочные или другие прокладки, помещаемые между грузом и посадочной платформой. К более сложным относятся разламываемые клети, сотовые конструкции, рессоры, гидравлические тормоза, пневматические устройства в виде мешков, наполненных воздухом и др. Описанные устройства увеличивают высоту центра масс груза над нижней поверхностью амортизатора [1], поскольку для обеспечения заданной перегрузки необходим определенный путь торможения. При этом создается большой опрокидывающий момент при горизонтальном перемещении груза относительно грунта со скоростью ветра, что является главным недостатком описанных амортизаторов.
Второй способ заключается в использовании реактивных тормозителей [1, 2] или, например, патент РФ №2272757, МПК B64G, 1/00. Основной частью реактивного тормозителя является двигатель, в котором происходит сгорание топлива, и из сопла которого истекают продукты сгорания с большой скоростью. Струя истекающих газов создает реактивную силу, которая и используется в качестве силы торможения снижающегося на парашюте груза. Существенное отличие реактивного тормозителя от различных амортизаторов заключается в том, что груз можно тормозить на большом пути торможения, тогда как амортизаторы с большим путем торможения неприменимы, так как при этом расстояние от центра масс груза до нижней поверхности амортизатора в момент касания посадочной поверхности велико и груз опрокидывается, особенно при наличии ветра. Во время работы реактивного двигателя происходит Работающий реактивный двигатель оказывает значительное вибро-акустическое воздействие на груз и окружающую среду. Струи высокотемпературного газа, натекающие на подстилающую поверхность, могут вызвать пожар. Использование твердотопливных реактивных двигателей для уменьшения вертикальной скорости при парашютной посадке не может широко использоваться в народном хозяйстве из-за организационных трудностей работы со взрывчатым веществом.
Третий способ заключается в использовании линейного упругого звена, соединяющего груз и парашют [3, 4]. Для гашения вертикальной скорости используется система подвеса на упругом звене, которое вводится в действие на определенной высоте непосредственно перед посадкой. Система совершает колебания в продольном направлении. Груз касается посадочной поверхности в момент времени когда его вертикальная скорость минимальна. Для реализации такого способа посадки упругое звено вводить в действие необходимо в определенный момент времени. Процесс посадки длится примерно ¾ периода продольных колебаний, за это время значительно меняются скорости груза и парашюта, накапливаются случайные погрешности в кинематических и динамических параметрах системы. Основным недостатком такой системы является необходимость применения высокоточных систем измерения высоты и управления процессом посадки.
Четвертый способ уменьшения вертикальной скорости заключается в разделении десантируемого груза на две части и размещении их в виде тандема, как, например, при использовании грузового контейнера ГК-30 в процессе парашютного десантирования бойцов вооруженных сил [5]. Если десантируемый груз разделить на две части и соединить их гибкой связью одну под другой в виде тандема, то посадка частей груза будет происходить по очереди. Процесс посадки можно интерпретировать как последовательное уменьшение массы груза, а, следовательно, и уменьшение вертикальной скорости т.к. площадь парашюта остается неизменной. В таком случае верхняя часть груза касается посадочной поверхности со скоростью меньшей, чем у нижней части. Такой способ уменьшения вертикальной скорости используется при парашютном десантировании бойцов вооруженных сил с применением грузового контейнера ГК-30, в котором размещается снаряжение. Недостатком этого способа является то, что вертикальная скорость не уменьшается до нуля.
Наиболее близким техническим решением, выбранным в качестве прототипа, является система мягкой парашютной посадки с устройством гашения вертикальной скорости груза с применением упругого звена. Патент №2429165, МПК B64G, 1/00. Общим с заявляемым устройством является наличие упругого звена.
Основными недостатками системы мягкой посадки с упругим звеном являются:
- необходимость точного измерения высоты груза над посадочной поверхностью в процессе движения парашютной системы для определения момента времени раскрытия автоматического замка и введения в действие упругого звена,
- применение системы управления для парирования накапливаемых случайных погрешностей во время процесса посадки, который занимает примерно ¾ периода продольных колебаний на упругом звене.
Применение высокоточных приборов измерения высоты и интеллектуальной системы управления повышает стоимость изготовления и обслуживания системы посадки, а также, вследствие использования дополнительных приборов, снижает ее надежность.
Задачей устройства мягкой парашютной посадки является повышение надежности и упрощение системы посадки при обеспечении скорости посадки близкой к нулю.
Поставленная задача решается за счет того, что в устройстве, содержащем парашют, основной и дополнительный грузы, соединенные гибкой связью, упругое звено, соединяющее парашют и основной груз, абсолютное удлинение упругого звена при движении парашютной системы с установившейся вертикальной скоростью (Δl) относится к длине гибкой связи (h) в соответствии со следующим соотношением:

где m1 - масса основного груза, m2 - масса дополнительного груза, С=1,5÷2.
При установившемся движении в упругом звене накоплена потенциальная энергия за счет суммарного веса основного и дополнительного грузов, которая после касания дополнительным грузом посадочной поверхности расходуется на торможение основного груза за счет поддержания высокой скорости движения парашюта на фазе сжатия упругого звена, при этом при выбранной длине звена между основным и дополнительным грузами по соотношению масс грузов с учетом величины абсолютного удлинения упругого звена обеспечивается уменьшение вертикальной скорости основного груза в момент касания посадочной поверхности до значения, близкого к нулю.
Новизна предлагаемого технического решения заключается в использовании параметров системы Δl, h, m1, m2 согласно соотношению (I). В процессе посадки в устройстве не применяются никакие регистрирующие и управляющие приборы, что повышают ее надежность.
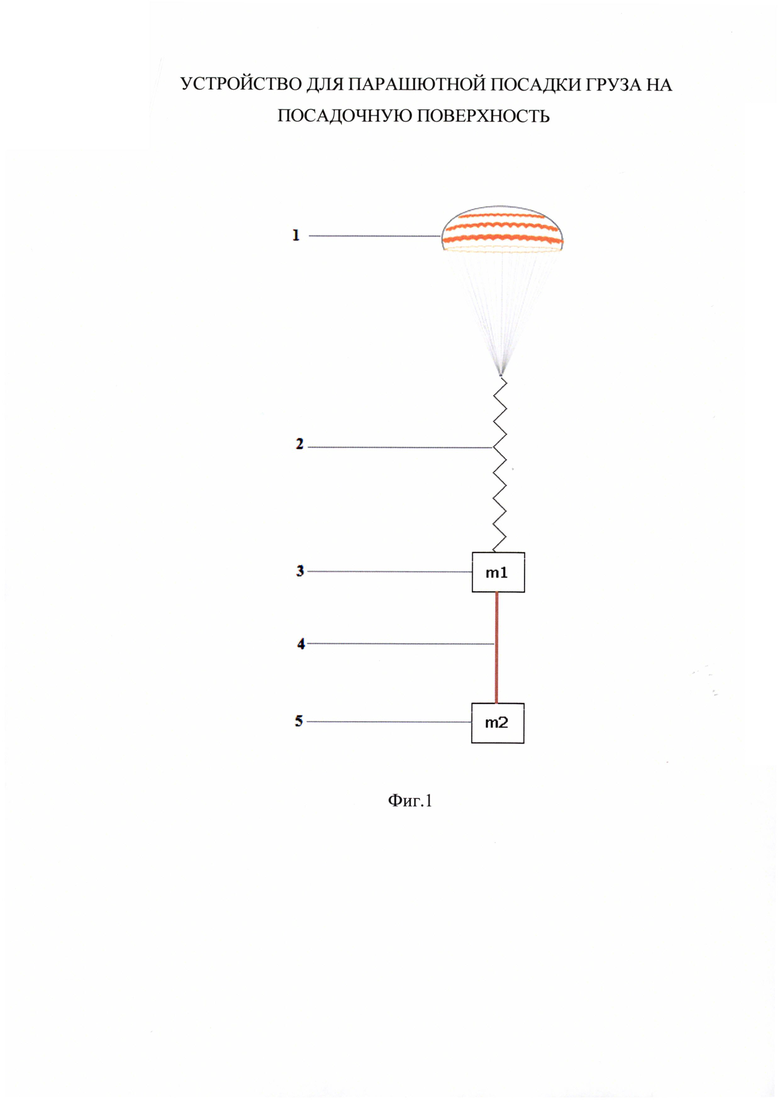
На фиг. 1 показана схема устройства с основными функциональными элементами:
1 - парашют,
2 - упругое звено,
3 - основной груз,
4 - гибкая связь,
5 - дополнительный груз.
Основной груз (3) соединен с парашютом (1) с помощью упругого звена (2). Основной груз (3) соединен с дополнительным грузом (5) гибкой связью (4).
Устройство функционирует следующим образом. Парашютная система (фиг. 1) движется в атмосфере с установившейся вертикальной скоростью. Упругое звено (2) нагружено общим весом основного (3) и дополнительного (5) грузов. Длина гибкой связи (4) определяется по соотношению масс основного (3) и дополнительного (5) грузов с учетом величины абсолютного удлинения упругого звена (2) под действием суммарного веса грузов по формуле (I), где С=1,5÷2,0.
В момент касания дополнительным грузом (5) посадочной поверхности сила его тяжести перестает действовать на основной груз (3) через гибкую связь (4) и осуществляется снижение вертикальной скорости основного груза (3) до нуля под действием силы упругости упругого звена (2).
Диапазон численных значений коэффициента С в формуле (I), при которых устройство эффективно работает, выявлен в результате экспериментальных исследований, результат которых показан в виде графика на фиг. 2. Кривые 6, 7, 8 относятся к скоростям вертикального снижения 6, 12 и 18 м/с соответственно.
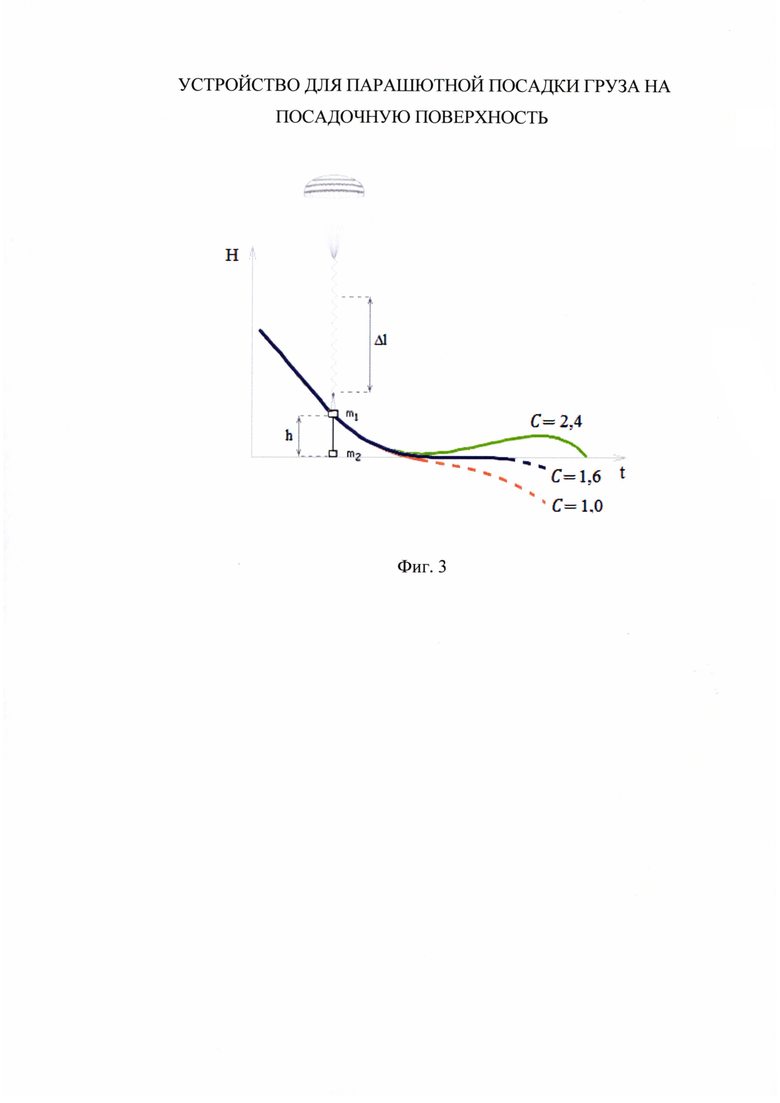
На фиг. 3 показаны траектории движения груза (зависимости высоты H от времени t) в зависимости от коэффициента С. При С<1.5 скорость груза не достигает нулевого значения. При С>2,0 в упругом звене запасена избыточная потенциальная энергия, в результате высвобождения которой груз может приобретать положительную вертикальную скорость, что приводит ко второму контакту с посадочной поверхностью со скоростью, отличной от нулевой. При 1,5≤С≤2,0 посадка осуществляется при вертикальной скорости близкой к нулевой.
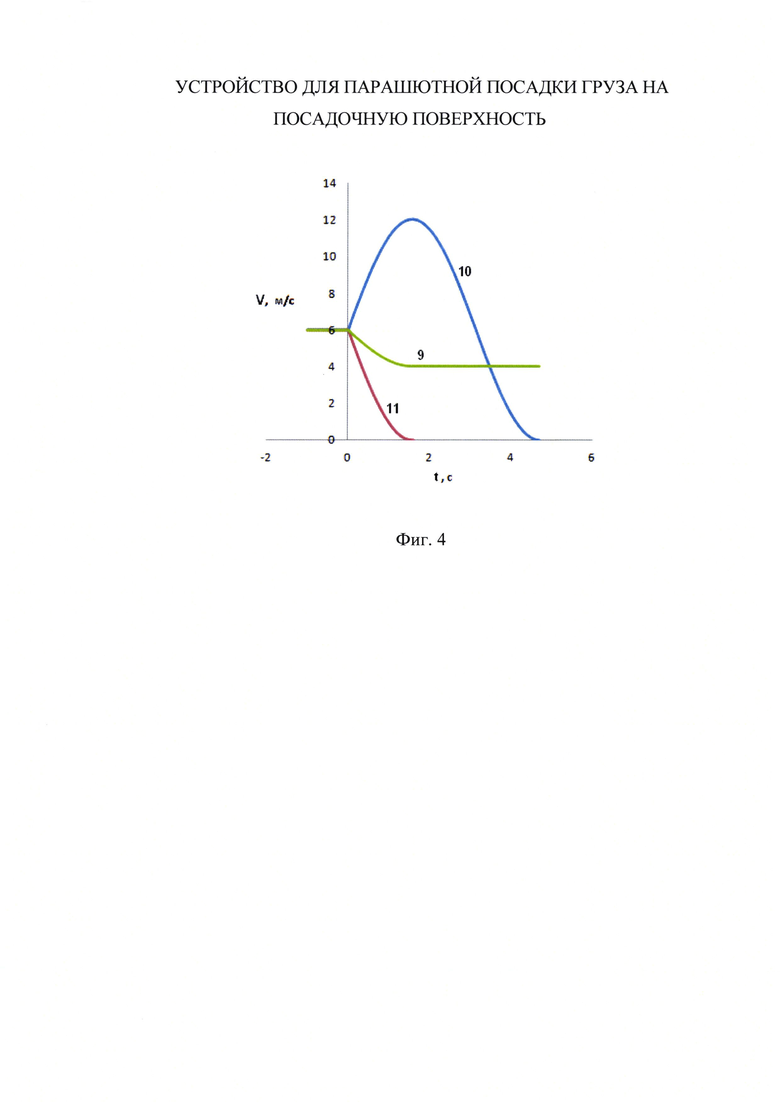
На фиг. 4 показаны графики зависимостей вертикальной скорости V груза от времени t для различных систем мягкой посадки. При разделении груза без упругого звена нулевая скорость посадки не достигается (кривая 9). При использовании упругого звена без разделения груза процесс посадки занимает продолжительное время, за которое возможно накопление значительных погрешностей (кривая 10). В такой системе посадки необходимо использовать систему точного измерения высоты и управления. При использовании системы с упругим звеном и разделением грузов мягкая посадка осуществляется за более короткое время и без системы управления (кривая 11).
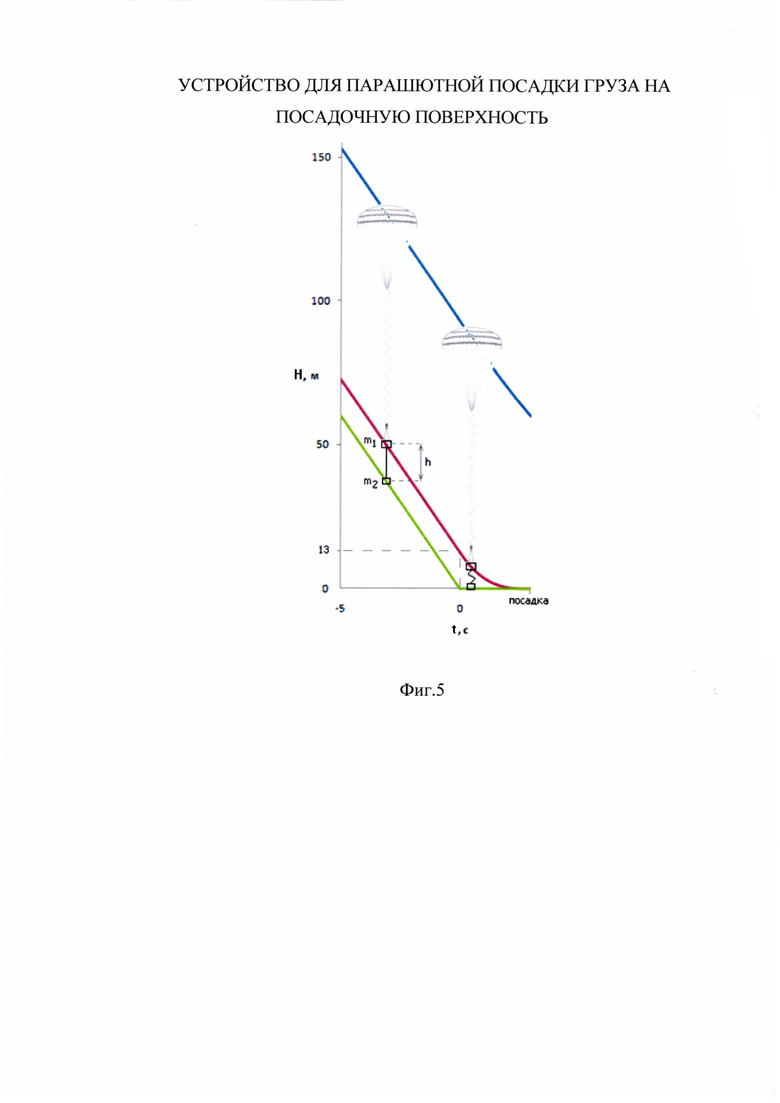
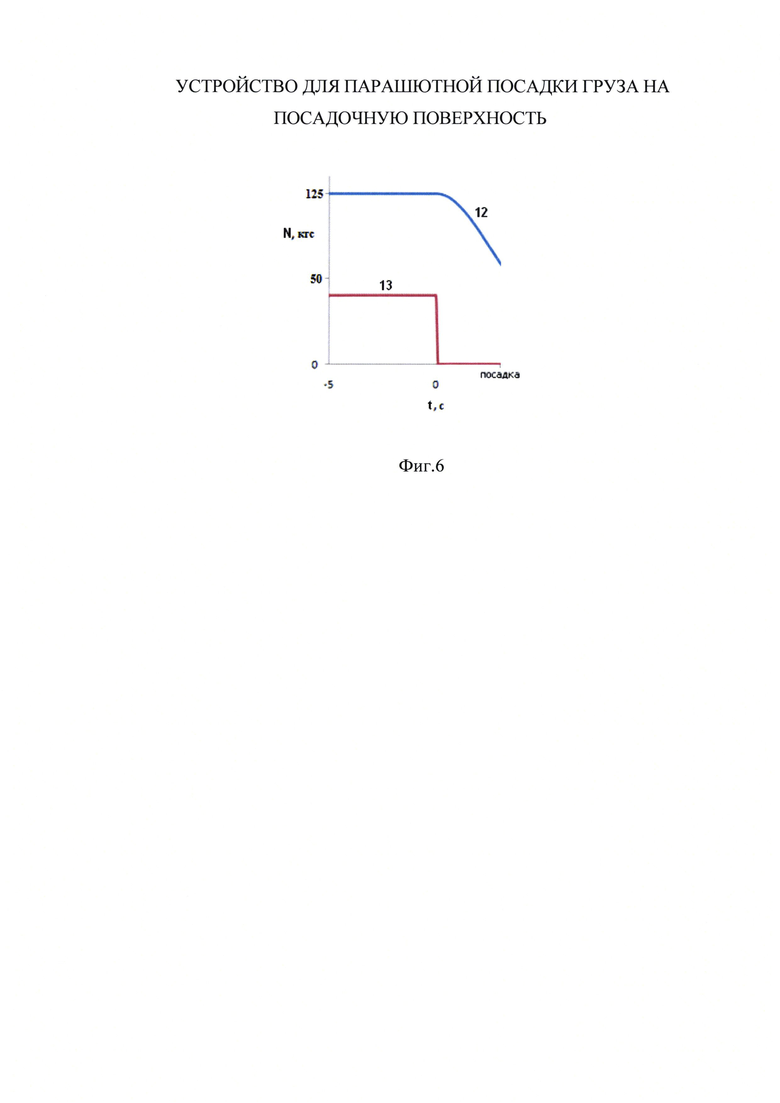
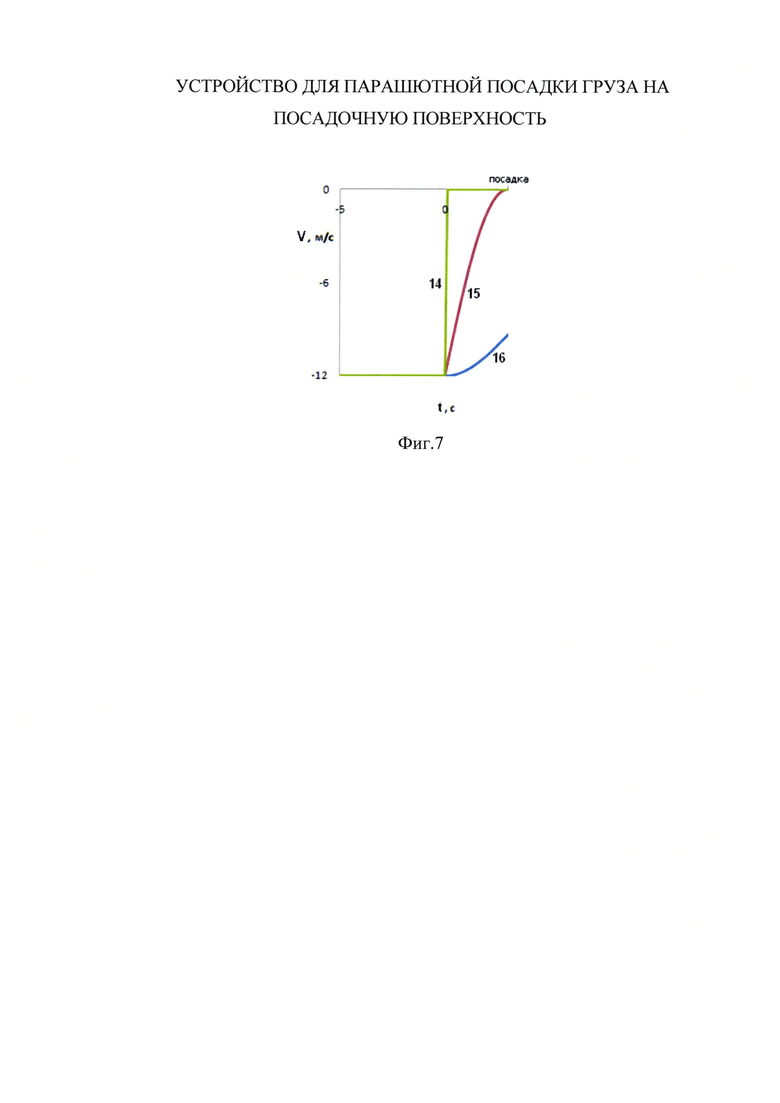
На фиг. 5-7 показан пример работы устройства мягкой парашютной посадки. На оси слева отложена высота Н. На высоте Н=0 находится посадочная поверхность. Парашютная система состоит из основного груза массой m1=75 кг и дополнительного груза массой m2=50 кг, соединенных гибкой связью длиной h=13 м, упругого звена, обеспечивающего абсолютное удлинение Δl=50 м под весом суммарной массы m1+m2=125 кг, и парашюта, обеспечивающего вертикальную скорость снижения V=12 м/с. Безразмерный коэффициент в формуле (I) С=1,54. Упругое звено закреплено одним концом к парашюту, другим - к основному грузу. На фиг. 6 показан график изменения силы реакции подвеса N для упругого звена (кривая 12) и гибкой связи (кривая 13) от времени t. На фиг. 7 показан график изменения вертикальной скорости V во время посадки для дополнительного груза (кривая 14), основного груза (кривая 15) и парашюта (кривая 16).
Данное изобретение позволяет:
- осуществить мягкую посадку без использования системы управления;
- уменьшить требования по безопасности при изготовлении и эксплуатации за счет исключения в системе взрывоопасных веществ;
- минимизировать негативные воздействия на внешнюю среду и посадочную поверхность;
- устройство допускает многократное использование.
Литература
1. Лобанов Н.А. Основы расчета и конструирования парашютов. - М.: Машиностроение, 1965. - 364 с.
2. Герасименко И.А., Комов И.А. Воздушно-десантная подготовка. Часть 3. Парашютно-реактивные системы и их применение. - М: МО СССР. Военное издательство, 1989. - 224 с.
3. Пат. 2429165 РФ. Устройство для мягкой парашютной посадки груза на посадочную поверхность / Белошицкий A.B. (RU), Журин C.B. (RU), Швед Тамара Николаевна (RU), Цветкова Наталья Николаевна (RU) - Заяв. 06.05.2010; Опубл. 20.09.2011.
4. Пат. 2429991 РФ. Устройство для мягкой парашютной посадки груза на посадочную поверхность / Брюханов H.A. (RU), Белошицкий A.B. (RU), Журин C.B. (RU), Решетников Михаил Николаевич (RU) - Заявл. 04.05.2010; Опубл. 27.09.2011.
5. Лушников Ф.А. Братья Доронины. - М.: ДОСААФ, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МЯГКОЙ ПАРАШЮТНОЙ ПОСАДКИ ГРУЗА НА ПОСАДОЧНУЮ ПОВЕРХНОСТЬ | 2010 |
|
RU2429165C1 |
| УСТРОЙСТВО ДЛЯ МЯГКОЙ ПАРАШЮТНОЙ ПОСАДКИ ГРУЗА НА ПОСАДОЧНУЮ ПОВЕРХНОСТЬ | 2010 |
|
RU2429991C1 |
| Парашютно-десантная платформа | 2021 |
|
RU2764475C1 |
| СПОСОБ ОТДЕЛЕНИЯ ГРУЗА ОТ ПАРАШЮТНОЙ СИСТЕМЫ | 2019 |
|
RU2745508C2 |
| ПНЕВМОАМОРТИЗАТОР ДЛЯ ПАРАШЮТНОГО ДЕСАНТИРОВАНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2019 |
|
RU2722828C1 |
| ПНЕВМОАМОРТИЗАТОР ДЛЯ ДЕСАНТИРОВАНИЯ ГРУЗОВ | 2007 |
|
RU2349509C1 |
| Парашютная платформа | 2021 |
|
RU2763204C1 |
| Устройство бесплатформенного парашютного десантирования грузов из летательных аппаратов | 2021 |
|
RU2764814C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ МЯГКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2400410C1 |
| Энергоёмкий пневмоамортизатор для десантирования грузов (варианты) | 2020 |
|
RU2753782C1 |

Изобретение относится к области спуска объектов в атмосфере на парашюте. Устройство для мягкой парашютной посадки груза на посадочную поверхность содержит парашют, основной и дополнительный грузы, соединенные гибкой связью, упругое звено, соединяющее парашют и основной груз. Абсолютное удлинение упругого звена при движении парашютной системы с установившейся вертикальной скоростью относится к длине гибкой связи в соответствии с соотношением, учитывающим массу основного и дополнительного грузов. Изобретение направлено на уменьшение вертикальной скорости основного груза в момент касания посадочной поверхности. 7 ил.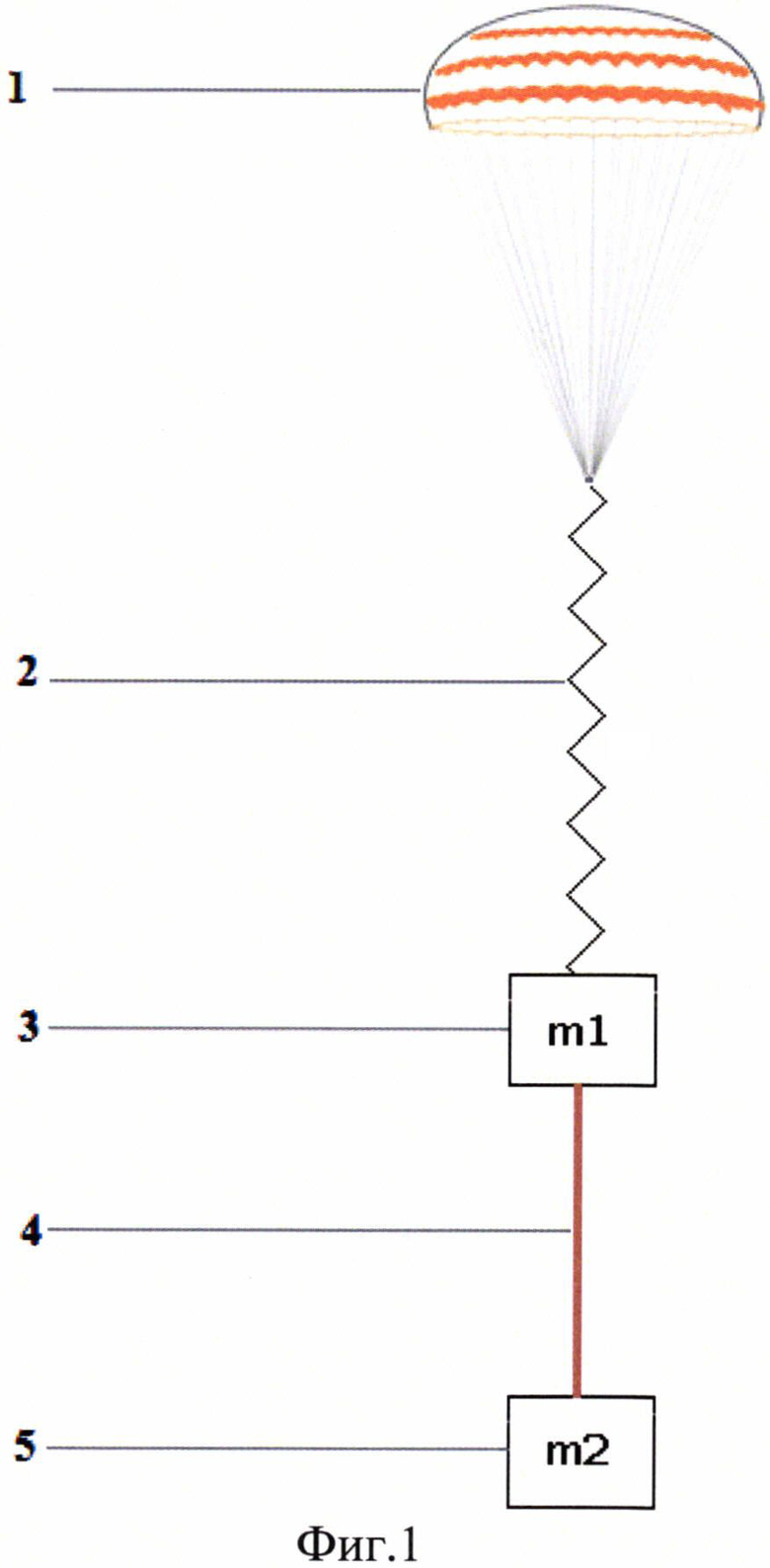
Устройство для мягкой парашютной посадки груза на посадочную поверхность, содержащее парашют, основной и дополнительный грузы, соединенные гибкой связью, упругое звено, соединяющее парашют и основной груз, отличающееся тем, что абсолютное удлинение упругого звена при движении парашютной системы с установившейся вертикальной скоростью (Δl) относится к длине гибкой связи (h) в соответствии со следующим соотношением:

где m1 - масса основного груза, m2 - масса дополнительного груза, С=1,5÷2.
| УСТРОЙСТВО ДЛЯ МЯГКОЙ ПАРАШЮТНОЙ ПОСАДКИ ГРУЗА НА ПОСАДОЧНУЮ ПОВЕРХНОСТЬ | 2010 |
|
RU2429165C1 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ ПОЛЕТА В ВОЗДУХЕ ФИЗИЧЕСКОГО ТЕЛА, СВЯЗАННОГО С АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТЬЮ | 1995 |
|
RU2111149C1 |
| US 4333621 A1, 08.06.1982. | |||

