Изобретение относится к областям техники, где для спуска объектов в атмосфере используются парашюты. Оно может быть использовано для безударного приземления возвращаемых космических аппаратов или десантируемых грузов.
Неотъемлемым свойством парашютной посадки является наличие вертикальной скорости снижения. Уменьшение величины этой скорости сопряжено с увеличением размера парашюта, объема и массы парашютной системы. Для снижения вертикальной скорости до допустимых значений применяют парашютную систему приемлемой массы и объема, а перед касанием посадочной поверхности вводят в действие специальное тормозное устройство. Известно два основных способа торможения груза, спускаемого на парашюте, перед касанием посадочной поверхности: 1) при помощи амортизаторов [1], например, по заявке РФ №92015245 МПК В64С 25/28, 2) при помощи реактивных тормозителей [1, 2], например, патент РФ №2272757.
Известны различные конструкции амортизаторов, наиболее простыми являются войлочные или другие прокладки, помещаемые между грузом и посадочной платформой. К более сложным относятся разламываемые клети, сотовые конструкции, рессоры, гидравлические тормоза, пневматические устройства в виде мешков, наполненных воздухом и др. Описанные устройства увеличивают высоту центра масс груза над нижней поверхностью амортизатора [1], поскольку для обеспечения заданной перегрузки необходим определенный путь торможения. При этом создается большой опрокидывающий момент при горизонтальном перемещении груза относительно грунта со скоростью ветра, что является главным недостатком описанных амортизаторов.
Основной частью реактивного тормозителя является двигатель, в котором происходит сгорание топлива, и из сопла которого истекают продукты сгорания с большой скоростью. Струя истекающих газов создает реактивную силу, которая и используется в качестве силы торможения снижающегося на парашюте груза. Существенное отличие реактивного тормозителя от различных амортизаторов заключается в том, что груз можно тормозить на большом пути торможения, тогда как амортизаторы с большим путем торможения неприменимы, так как при этом расстояние от центра масс груза до нижней поверхности амортизатора в момент касания посадочной поверхности велико и груз опрокидывается, особенно при наличии ветра.
Наиболее близким техническим решением, выбранным в качестве прототипа, является система мягкой посадки с реактивным тормозителем, например, по заявке РФ №94019768, МПК В64В 1/06. Общим с заявляемым устройством является:
- введение в действие реактивного тормозителя по результатам измерения высоты до посадочной поверхности.
Основными недостатками систем мягкой посадки на реактивных тормозителях являются:
- наличие в системе посадки запасов взрывоопасного ракетного топлива;
- сложность двигательных установок и необходимость их дублирования;
- возможное разрушающее воздействие струй двигателей на посадочную поверхность с негативными последствиями как для окружающего пространства, так и для груза;
- сильное виброакустическое воздейстивие на груз.
Предложенное устройство мягкой парашютной посадки позволяет исключить негативные воздействия на посадочную поверхность и спускаемый груз, повысить безопасность, уменьшить вес и упростить систему посадки по сравнению с прототипом.
Поставленная задача решается за счет того, что в устройстве, содержащем парашют, фал, соединяющий груз с парашютом, датчик высоты, блок управления, кабельную сеть, автоматический замок фала, соединяющего парашют и груз, параллельно автоматическому замку фала закрепляется линейный упругий элемент с известными динамическими свойствами и при достижении расчетной высоты над посадочной поверхностью, зависящей от скорости движения системы груз-парашют и характеристик упругого элемента, производится разрыв фала, соединяющего груз с парашютом на участке между точками закрепления упругого элемента к фалу, за счет срабатывания автоматического замка фала, при этом груз под действием силы тяжести ускоряется и осуществляется накопление потенциальной энергии в удлиняющемся линейном упругом элементе, затем накопленная в упругом элементе энергия расходуется на торможение груза за счет ускоренного движения парашюта на фазе сжатия упругого элемента, обеспечивая вертикальную скорость груза в момент касания посадочной поверхности близкую к нулю.
Новизна предлагаемого технического решения заключается в использовании интегрированного в парашютный подвес линейного упругого элемента в качестве аккумулятора механической энергии, которая затем используется для гашения вертикальной скорости груза.
В практике не известны случаи использования линейного упругого элемента для обеспечения мягкой парашютной посадки.
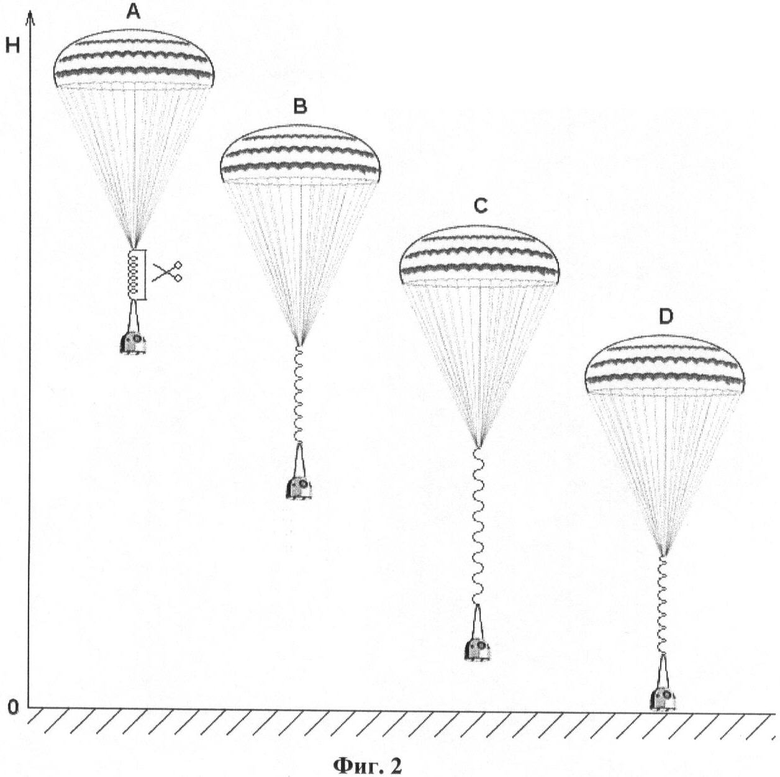
На фиг.1 показана схема устройства с основными функциональными элементами:
1 - парашют;
2 - линейный упругий элемент;
3 - груз;
4 - фал;
5 - автоматический замок фала;
6 - кабельная сеть;
7 - блок управления;
8 - датчик высоты.
Груз (3) соединен с парашютом (1) с помощью фала (4). В составе груза (3) или фала (4) находятся датчик высоты (8) и блок управления (7). Параллельно с фалом (4) закреплен линейный упругий элемент (2). На фале (4), между точками крепления линейного упругого элемента (2), находится автоматический замок фала (5). Электрическая связь между блоком управления (7), датчиком высоты (8) и автоматическим замком фала осуществляется при помощи кабельной сети (6).
Устройство функционирует следующим образом. Изначально груз (3) движется на парашюте (1) с постоянной вертикальной скоростью. Автоматический замок фала (5) закрыт. Линейный упругий элемент (2) не нагружен. Данные о жесткости линейного упругого элемента (2), массе спускаемого груза (3) и аэродинамических характеристиках парашюта (1) занесены в блок управления (7). Во время полета датчик высоты (8) постоянно определяет высоту груза (3) над посадочной поверхностью. По кабельной сети (6) эти данные поступают в блок управления (7), который рассчитывает возможные траектории движения системы груз (3) - упругий элемент (2) - парашют (1). По достижении высоты, при которой по расчетам траектории блоком управления (7) реализуется нулевая вертикальная скорость касания посадочной поверхности, блок управления (7) по кабельной сети (6) подает команду на раскрытие автоматического замка фала (5). Жесткая связь между грузом (3) и парашютом (1) нарушается. Под действием силы тяжести груз (3) начинает двигаться вниз ускоренно. Парашют (1) при этом тормозится за счет нескомпенсированной аэродинамической силы. Линейный упругий элемент (2) нагружается, запасая потенциальную механическую энергию. Через некоторое время сила упругости линейного упругого элемента (2) возрастает до такой величины, что начинает тормозить груз (3) и ускорять парашют (1). Вертикальная скорость груза (3) падает до нуля. В этот момент происходит касание грузом (3) посадочной поверхности.
На фиг.2 показана принципиальная схема работы системы посадки. Снизу схематически показана посадочная поверхность, слева ось с высотой Н - расстоянием между нижней точкой груза (3) и посадочной поверхностью. Изображено четыре стадии процесса посадки.
А - первая стадия, характеризующаяся установившимся движением системы груз - парашют с устройством мягкой парашютной посадки и достижением высоты, на которой раскрывается автоматический замок фала (5);
В - вторая стадия, на которой происходит ускоренное движение вниз груза (3) и накопление потенциальной энергии в линейном упругом элементе (2);
С - третья стадия. Осуществляется сжатие линейного упругого элемента (2) и торможение груза (3);
D - четвертая, завершающая стадия мягкой парашютной посадки с вертикальной скоростью, близкой к нулю.
На фиг.3 показан график зависимости высоты груза (3) над посадочной поверхностью от времени. Момент времени 0 соответствует моменту раскрытия автоматического замка фала (5). На 11 секунде траектория имеет полку и перегиб, т.е. нулевые первую и вторую производные (нулевую вертикальною скорость груза (3)).
Предлагаемое изобретение может быть реализовано, например, следующим образом.
Изначально груз (3) массой М=8000 кг движется на жесткой сцепке через фал (4) с парашютом (1), коэффициент аэродинамического сопротивления которого С=545 кг/м в атмосфере Земли. Скорость системы при этом постоянна V=12 м/с. Один конец крепления фала (4) закреплен через автоматический замок фала (5). Параллельно с автоматическим замком фала (5) закреплен линейный упругий элемент (2) с жескостью k=1500 Н/м. Он может быть выполнен из резины с модулем упругости Е=5 МПа. На установившемся режиме после ввода парашюта (1) система груз (3) - фал (4) с линейным упругим элементом (2) - парашют (1) движется на жесткой сцепке с постоянной скоростью, т.к. сила тяжести груза компенсируется силой аэродинамического торможения парашюта. При этом линейный упругий элемент (2) не нагружен. Осуществляется непрерывное измерение расстояния (высоты Н) от груза (3) до посадочной поверхности датчиком высоты (8) и передача информации по кабельной сети (6) в блок управления (7). Блок управления (7), используя данные по характеристикам системы груз (3) - линейный упругий элемент (2) - парашют (1) и замерам высоты, определяет момент раскрытия автоматического замка фала (5). В рассматриваемом примере при достижении высоты 185 м до посадочной поверхности блок управления (7) выдает команду по кабельной сети (6) на раскрытие автоматического замка фала. Сила тяжести, действующая на груз (3), вызывает его ускоренное движение к посадочной поверхности, в то время как аэродинамическая сила, действующая на парашют (1), тормозит последний. Происходит растяжение линейного упругого элемента (2) и накопление в нем потенциальной энергии. При определенном растяжении линейного упругого элемента (2) сила упругости на нем превышает вес груза (3) и происходит торможение груза (3) и ускорение парашюта (1). График с зависимостью высоты по времени приведен на фиг.3. Как видно из графика на фиг.3, в момент касания грузом (3) посадочной поверхности высота груза (3) и ее первая производная по времени близки к нулю. В результате груз (3) достигает посадочной поверхности со скоростью, близкой к нулю.
Данное изобретение позволяет:
- уменьшить требования по безопасности при изготовлении и эксплуатации за счет исключения в системе взрывоопасных веществ;
- уменьшить вес устройства мягкой посадки по сравнению с системами на основе реактивных двигателей;
- минимизировать негативные воздействия на внешнюю среду и посадочную поверхность;
- устройство допускает многократное использование.
Литература
1. Лобанов Н.А. Основы расчета и конструирования парашютов. - М.: Машиностроение, 1965. - 364 с.
2. Герасименко И.А., Комов И.А. Воздушно-десантная подготовка. Часть 3. Парашютно-реактивные системы и их применение. - М: МО СССР. Военное издательство, 1989. - 224 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МЯГКОЙ ПАРАШЮТНОЙ ПОСАДКИ ГРУЗА НА ПОСАДОЧНУЮ ПОВЕРХНОСТЬ | 2010 |
|
RU2429991C1 |
| УСТРОЙСТВО ДЛЯ ПАРАШЮТНОЙ ПОСАДКИ ГРУЗА НА ПОСАДОЧНУЮ ПОВЕРХНОСТЬ | 2014 |
|
RU2600028C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2020 |
|
RU2754278C1 |
| СПОСОБ ПАРАШЮТНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОДВИЖИТЕЛЕМ И ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2014 |
|
RU2592963C2 |
| Парашютно-десантная платформа | 2021 |
|
RU2764475C1 |
| СПОСОБЫ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И ВЗЛЕТНО-ПОСАДОЧНАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТИХ СПОСОБОВ | 2010 |
|
RU2466913C2 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ СИСТЕМА ВЕРТОЛЕТА | 1998 |
|
RU2162810C2 |
| УСТАНОВКА ПАРАШЮТНАЯ ТОРМОЗНАЯ ПОСАДОЧНАЯ ОДНОДВИГАТЕЛЬНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2801717C1 |
| УСТРОЙСТВО ПОСАДКИ КОСМИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2272757C2 |
| СИСТЕМА УПРАВЛЯЕМОГО СНИЖЕНИЯ И ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В АВАРИЙНОЙ СИТУАЦИИ (ВАРИАНТЫ) | 2004 |
|
RU2263613C1 |

Изобретение относится к средствам приземления десантируемых грузов. Устройство для мягкой парашютной посадки груза на посадочную поверхность содержит парашют, фал, соединяющий парашют с грузом, автоматический замок фала, датчик высоты, блок управления, кабельную сеть, соединяющую датчик высоты, блок управления и автоматический замок фала. Параллельно автоматическому замку фала закреплен линейный упругий элемент. Изобретение направлено на исключение негативных воздействий на посадочную поверхность и груз. 3 ил.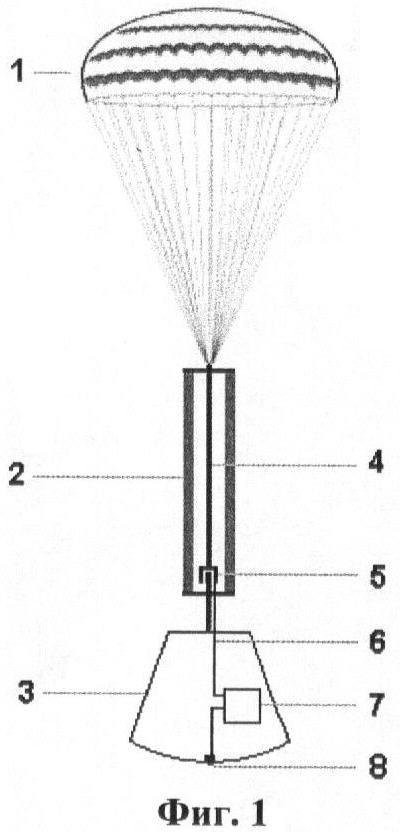
Устройство для мягкой парашютной посадки груза на посадочную поверхность, содержащее парашют, фал, соединяющий груз с парашютом, автоматический замок фала, кабельную сеть, соединяющую датчик высоты, блок управления и автоматический замок фала, отличающееся тем, что на участке фала с автоматическим замком параллельно автоматическому замку фала жестко закреплен линейный упругий элемент с заданными характеристиками.
| СПОСОБ ОСУЩЕСТВЛЕНИЯ ПОЛЕТА В ВОЗДУХЕ ФИЗИЧЕСКОГО ТЕЛА, СВЯЗАННОГО С АЭРОДИНАМИЧЕСКОЙ ПОВЕРХНОСТЬЮ | 1995 |
|
RU2111149C1 |
| УСТРОЙСТВО ДЛЯ СБРАСЫВАНИЯ ТЯЖЕЛЫХ ГРУЗОВ С ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1992 |
|
RU2015071C1 |
| WO 2004018288 A2, 04.03.2004 | |||
| ЧУВСТВИТЕЛЬНЫЕ К ДАВЛЕНИЮ КЛЕЕВЫЕ КОМПОЗИЦИИ НА ВОДНОЙ ОСНОВЕ И СПОСОБЫ ИХ ПОЛУЧЕНИЯ | 2017 |
|
RU2730317C1 |

