Изобретение относится к летательным аппаратам (ЛА) и посадочным платформам, в т.ч. космическим, завершающим полет приземлением на поверхность планеты с использованием парашютов.
Известны способы обеспечения мягкой посадки ЛА на твердую (суша, лед) и жидкую (вода) поверхности планеты - см., например, В.И.Баженов, М.И.Осин. Посадка космических аппаратов на планеты. М.: Машиностроение, 1978, стр.5-7, 13, 40-42.
Известен также способ обеспечения мягкой посадки ЛА с определением всех компонентов его скорости относительно поверхности планеты посредством применения многолучевого радиолокационного устройства - см. B.C.Авдуевский, Г.Р.Успенский. Космическая индустрия. М.: Машиностроение, 1989, стр.520, являющийся ближайшим аналогом.
Недостатком указанного способа является непредсказуемость действия перегрузок, возникающих в момент касания летательного аппарата поверхности планеты. Отсутствие полной информации о направлении действия перегрузок накладывает жесткие требования к бортовой аппаратуре аппарата, полезной нагрузке и к экипажу (в случае пилотируемого аппарата).
Например, из курса физиологии известно о способностях человеческого организма переносить перегрузки, действующие в различных направлениях по отношению к организму. (Максимально возможные перегрузки переносятся в направлении «грудь-спина».) Поэтому выбор наиболее рационального сочетания возможностей организма переносить перегрузки и технических особенностей аппарата является важной задачей для сохранения экипажа, а гарантированное определение направления действия перегрузок позволяет смягчить требования к полезной нагрузке, аппаратуре, а также к экипажу, что является актуальной задачей в освоении космоса (в т.ч. развитии космического туризма).
Целью предлагаемого изобретения является создание способа мягкой парашютной посадки для ориентированного (например, в направлении «голова-ноги» экипажа) приземления автоматического или пилотируемого ЛА, что, с одной стороны, обеспечивает относительно комфортное перенесение посадочных перегрузок, с другой стороны, требует минимума дополнительных приборов и устройств для технической реализации.
Указанная цель достигается благодаря разработанному способу обеспечения мягкой посадки летательного аппарата, включающего парашютный спуск до заданного расстояния от поверхности планеты, определение направления вектора горизонтальной скорости ЛА, определение угла рассогласования между базовой плоскостью ЛА и вектором его горизонтальной скорости, включение ракетных двигателей мягкой посадки при приземлении, отцепку купола парашюта после касания поверхности, отличающемуся тем, что на расстоянии не более 1000 м от поверхности планеты летательный аппарат разворачивают относительно купола парашюта до совмещения базовой плоскости ЛА с вектором его горизонтальной скорости при помощи привода и сохраняют это положение ЛА до момента касания поверхности планеты.
При этом определение направления вектора горизонтальной скорости возможно произвести двумя способами:
- путем периодического вычитания из N-го значения измеренных плоских координат летательного аппарата (N-1) значения, а ориентацию базовой плоскости летательного аппарата определяют с момента начала парашютного спуска относительно инерциальных осей бортовой системы инерциальной навигации, жестко привязанных к осям плоских координат поверхности планеты, а периодическое определение плоских координат ЛА производят с применением спутниковой навигационной системы;
- с применением двухлучевого доплеровского измерителя скорости.
Перечень чертежей:
- фигура 1 - принципиальная схема мягкой парашютной посадки ЛА на примере возвращаемого пилотируемого космического аппарата (капсулы);
- фигура 2 - варианты определения направления вектора горизонтальной скорости с использованием двухлучевого доплеровского измерителя скорости;
- фигура 3 - вариант определения направления вектора горизонтальной скорости с использованием системы инерциальной спутниковой навигации ЛА;
- фигура 4 - траектория ЛА в плоских координатах поверхности планеты.
Обозначения:
1 - летательный аппарат на примере возвращаемого пилотируемого космического аппарата (капсулы);
2 - купол парашюта;
3 - стропы;
4 - вертлюг/механический привод разворота ЛА;
5 - реактивный привод разворота ЛА;
6 - доплеровский измеритель скорости (ДИС);
7 - антенна ДИС;
8 - система инерциальной навигации (СИН);
9 - спутниковая навигационная система (СНС);
10 - антенна СНС.
Способ обеспечения мягкой посадки летательного аппарата реализуется следующим образом (на примере возвращаемого пилотируемого космического аппарата).
В момент достижения ЛА поз.1 зоны парашютирования (фиг.1, 2) производится раскрытие и наполнение атмосферным газом (на Земле - воздухом) одного или нескольких куполов парашютов поз.2, обеспечивающих снижение аппарата со скоростью 6-12 м/с (оптимальный вариант). При этом в зависимости от состава и возможностей бортового оборудования ЛА поз.1 в соответствии с циклограммой работы осуществляется определение направления вектора горизонтальной скорости аппарата и угла рассогласования между базовой плоскостью ЛА и вектором его горизонтальной скорости. На высоте не более 1000 м от поверхности планеты - по соображениям экономии энергии рабочего тела привода поз.4, 5 - начинается процесс совмещения базовой плоскости с вектором горизонтальной скорости ЛА поз.1 (см. также фиг.4). При этом размещенный на стропах поз.3 вертлюг, совмещенный с механическим приводом поз.4, обеспечивает разворот ЛА поз.1 относительно местной вертикали путем «отталкивания» от наполненного газом инертного купола парашюта поз.2 и его «плоской» строповой системы поз.3.
На фиг.2 представлен вариант определения направления вектора горизонтальной скорости ЛА поз.1 с использованием двухлучевого доплеровского измерителя скорости (ДИС), когда ДИС поз.6 формирует пару взаимно перпендикулярных лучей через антенны поз.7 и по доплеровской разнице частот принимаемых обратных сигналов определяет ориентацию базовой плоскости относительно вектора горизонтальной скорости. Исполнительными органами здесь являются реактивные приводы поз.5. В принципе, данный вариант позволяет измерять полную посадочную скорость ЛА поз.1 (горизонтальную и вертикальную составляющие скорости снижения аппарата).
На фиг.3, 4 показан вариант определения направления вектора горизонтальной скорости ЛА поз.1 с использованием с применением СИН поз.8 и СНС поз.9. Здесь ориентация базовой плоскости аппарата определяется относительно инерциальной оси СИН поз.8, наиболее развернутой относительно местной вертикали (т.е. близкой к горизонтали). При этом вектор горизонтальной скорости (мгновенный для центра масс аппарата) определяется путем периодического измерения плоских (например, типа «широта»/«долгота») координат ЛА поз.1 и последовательного вычитания из N-го значения измеренных (например, посредством СНС поз.9 через антенны поз.10) плоских координат (N-1) значения измеренных координат. При этом положение вектора горизонтальной скорости в связанной системе координат ЛА поз.1 (т.е. относительно центра масс аппарата) определяется углом относительно той же инерциальной оси СИН поз.8 - см. фиг.4. Угол рассогласования между базовой плоскостью и вектором горизонтальной скорости аппарата, сводимый к нулю при посадке ЛА поз.1, в данном случае представляет собой сумму двух однозначно определяемых углов: между базовой плоскостью и инерциальной осью СИН и между вектором горизонтальной скорости и той же инерциальной осью СИН.
Варианты с ДИС поз.6, 7, СИН поз.8, СНС поз.9, 10 могут быть объединены на одном ЛА поз.1 с целью повышения надежности штатной реализации способа мягкой парашютной посадки.
Применение предложенного технического решения позволит получить новое качество - мягкую посадку ЛА на поверхность планеты с минимизацией уровня посадочных перегрузок и их распределением в наиболее предпочтительной по переносимости зоне. Это особенно актуально для пилотируемых возвращаемых аппаратов нового поколения, проектируемых в расчете как на профессиональных космонавтов, так и на малоподготовленных специалистов и даже космических туристов.
Предложенный способ нашел отражение в создаваемой космической технике и планируется к использованию в запланированных проектах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЕСПЕЧЕНИЯ МЯГКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2543451C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| АЭРОКОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2436715C2 |
| Многокупольная крыльевая система | 2020 |
|
RU2770501C2 |
| АКВААЭРОКОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2626418C2 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ СПУСКА В АТМОСФЕРЕ ПЛАНЕТЫ И СПОСОБ СПУСКА КОСМИЧЕСКОГО АППАРАТА В АТМОСФЕРЕ ПЛАНЕТЫ | 1994 |
|
RU2083448C1 |
| УСТРОЙСТВО ПОСАДКИ КОСМИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2272757C2 |
| УПРАВЛЯЕМАЯ ПАРАПЛАННАЯ СИСТЕМА | 2008 |
|
RU2378160C1 |
| Способ подготовки парашютистов и устройство его реализующее | 2019 |
|
RU2730759C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2506553C2 |



Изобретение относится к летательным аппаратам (ЛА) и посадочным платформам, завершающим полет приземлением на поверхность планеты с использованием парашютов. Способ обеспечения мягкой посадки летательного аппарата включает парашютный спуск до заданного расстояния от поверхности планеты, определение направления вектора горизонтальной скорости ЛА, определение угла рассогласования между базовой плоскостью ЛА и вектором его горизонтальной скорости, включение ракетных двигателей мягкой посадки при приземлении, отцепку купола парашюта после касания поверхности. На расстоянии не более 1000 м от поверхности планеты летательный аппарат разворачивают относительно купола парашюта до совмещения базовой плоскости ЛА с вектором его горизонтальной скорости при помощи привода и сохраняют это положение ЛА до момента касания поверхности планеты. Достигается мягкая посадка ЛА на поверхность планеты с минимизацией уровня посадочных перегрузок и их распределением в наиболее предпочтительной по переносимости зоне. 3 з.п. ф-лы, 4 ил.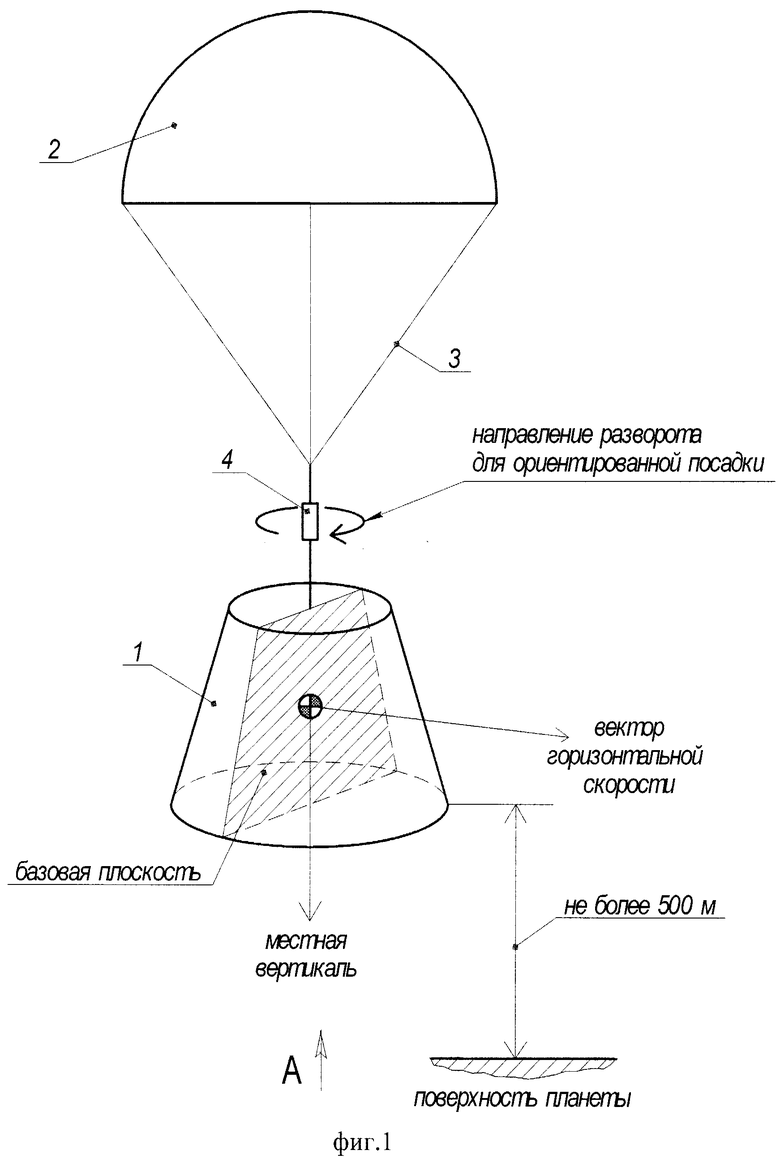
1. Способ обеспечения мягкой посадки летательного аппарата, включающий парашютный спуск до заданного расстояния от поверхности планеты, определение направления вектора горизонтальной скорости ЛА, определение угла рассогласования между базовой плоскостью ЛА и вектором его горизонтальной скорости, включение ракетных двигателей мягкой посадки при приземлении, отцепку купола парашюта после касания поверхности, отличающийся тем, что на расстоянии не более 1000 м от поверхности планеты летательный аппарат разворачивают относительно купола парашюта до совмещения базовой плоскости ЛА с вектором его горизонтальной скорости при помощи привода и сохраняют это положение ЛА до момента касания поверхности планеты.
2. Способ обеспечения мягкой посадки летательного аппарата по п.1, отличающийся тем, что при парашютном спуске летательного аппарата определение направления вектора горизонтальной скорости производят периодически путем вычитания из N-го значения измеренных плоских координат летательного аппарата (N-1) значения, а ориентацию базовой плоскости летательного аппарата определяют с момента начала парашютного спуска относительно инерциальных осей бортовой системы инерциальной навигации, жестко привязанных к осям плоских координат поверхности планеты.
3. Способ обеспечения мягкой посадки летательного аппарата по п.1, 2, отличающийся тем, что периодическое определение плоских координат ЛА производят с применением спутниковой навигационной системы.
4. Способ обеспечения мягкой посадки летательного аппарата по п.1, отличающийся тем, что при парашютировании ЛА определение направления вектора горизонтальной скорости относительно базовой плоскости ЛА производят с применением двухлучевого доплеровского измерителя скорости.
| RU 93003639 А, 20.01.1997 | |||
| УСТРОЙСТВО ПОСАДКИ КОСМИЧЕСКОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2272757C2 |
| СПУСКАЕМЫЙ АППАРАТ С НЕСУЩИМ КОРПУСОМ И СПОСОБ ЕГО ПОСАДКИ | 2001 |
|
RU2214351C2 |
| JP 2007182182 А, 19.07.2007 | |||
| JP 9301290 А, 25.11.1997 | |||
| JP 10287300 А, 27.10.1998. | |||

