Настоящее изобретение относится к устройствам для управления поворотными лопатками турбомашины и, в частности, к устройствам для синхронного управления поворотными лопатками турбомашины.
Известно, например, из публикации GB 1276720 применение в турбомашине одной или более ступеней лопаток статора для регулирования потока и направления потока газа, проходящего через компрессорную секцию как функцию рабочей частоты вращения турбомашины. Эти ступени лопаток статора содержат множество лопаток (также известных как лопатки с переменным шагом), которые могут поворачиваться вокруг их осей, соединяющих их со статором, так, чтобы угол их наклона можно было менять как функцию рабочей частоты вращения турбомашины.
Известные устройства для управления поворотными лопатками турбомашины обычно содержат множество поворотных лопаток, распределенных по азимуту на угле 90° вокруг оси турбомашины, при этом эти поворотные лопатки ориентированы по существу радиально относительно оси турбомашины, и управляющий кольцевой участок для управления поворотом лопаток, при этом каждая лопатка соединена с управляющим кольцевым участком звеном, при этом управляющий кольцевой участок удерживается вокруг оси турбомашины набором звеньев.
В турбомашинах, имеющих осевой компрессор, лопатки ориентированы радиально вокруг оси турбомашины и выполнены с возможностью поворота вокруг соответствующих радиальных осей. Следует отметить, что термин "ориентированы по существу радиально" охватывает любую конфигурацию, в которой радиальные оси, вокруг которых поворачиваются лопатки, образуют угол в диапазоне от 45° до 90° к оси турбомашины.
Кроме того, следует отметить, что термин "кольцевой участок" используется для обозначения в равной степени полного кольца или только части кольца.
Кольцевой участок по существу управляется исполнительным механизмом, который заставляет его поворачиваться вокруг оси турбомашины в том или ином направлении. Движения устройств такого типа являются комплексными и очень точными, так что, если не соблюдать прецизионные допуски, устройство может стать статически неопределимым (т.е. его заклинивает). В частности, это налагает строгие ограничения на позиционирование и центрирование кольцевого участка относительно оси турбомашины. Таким образом, небольшой отход от этих положений очень быстро приводит возникновению высоких уровней напряжения во всем управляющем устройстве и к его вероятному заклиниванию. Эта проблема центрирования (или, в более общем виде, позиционирования) усугубляется разницей в коэффициентах теплового расширения между различными частями устройства.
Задачей настоящего изобретения является, по меньшей мере, частичное устранение вышеописанных недостатков.
В настоящем изобретении эта задача решается за счет того, что, по меньшей мере, два звена соединены с кольцевым участком соответствующими шаровыми шарнирными соединениями, имеющими только три вращательные степени свободы, а каждое из других звеньев соединено с кольцевым участком соответствующими скользящими поворотными соединениями, имеющими только две степени свободы - поступательную и вращательную.
Таким образом, согласно первому объекту настоящего изобретения создано управляющее устройство для управления поворотными лопатками турбомашины, имеющей множество поворотных лопаток, распределенное по азимуту относительно оси турбомашины на, по меньшей мере, 90°. Поворотные лопатки ориентированы по существу радиально относительно оси турбомашины, и кольцевой управляющий участок для управления поворотом лопаток, причем каждая лопатка соединена с кольцевым управляющим участком звеном, при этом управляющий кольцевой участок удерживается вокруг оси турбомашины набором звеньев. По меньшей мере, два звена соединены с кольцевым участком соответствующими шаровыми шарнирными соединениями, а каждое из других звеньев соединено с кольцевым участком соответствующими скользящими поворотными соединениями.
Предпочтительно, два шаровых шарнирных соединения отстоят друг от друга по азимуту на приблизительно 90°.
Предпочтительно, два звена, соединенные с кольцевым участком соответствующими шаровыми шарнирными соединениями, являются жесткими, а звенья, соединенные с кольцевым участком соответствующими скользящими поворотными соединениями, являются более гибкими, обладая способностью к упругой деформации.
Предпочтительно, более гибкие звенья являются упругодеформируемыми при кручении и при изгибе.
Предпочтительно, одно из скользящих поворотных соединений удерживается от скольжения, чтобы сформировать только поворотное соединение.
Согласно второму объекту настоящего изобретения создана турбомашина, содержащая вышеописанное управляющее устройство.
Таким образом, как это должно быть понятно из вышесказанного, поворотное соединение (или соединение только для поворота) является соединением, имеющим только одну степень свободы в направлении вращения, а все остальные степени свободы заблокированы (две степени в направлении вращения и три степени в направлении прямолинейного перемещения). Скользящее поворотное соединение - это поворотное соединение, в котором имеется степень свободы прямолинейного движения вдоль оси вращения при повороте. Таким образом, скользящее поворотное соединение допускает движение с одной степенью свободы в направлении вращения и одной степенью свободы в направлении прямолинейного перемещения, тогда как остальные четыре степени свободы (две в направлении вращения и две в направлении прямолинейного перемещения) заблокированы. Шаровое шарнирное соединение является соединением, имеющим три степени свободы в направлении вращения, тогда как все степени свободы в направлении прямолинейного перемещения заблокированы.
Очевидно, что поворотные соединения способны скользить в направлениях их осей поворота и, следовательно, на них действуют только силы, которые направлены поперек их осей поворота. Следовательно, вес кольцевого участка поддерживается большей частью шаровыми шарнирными соединениями. Поскольку поворотные соединения являются скользящими, они принимают только часть веса кольцевого участка, величина которой зависит от ориентации скользящего поворотного соединения относительно направления силы тяжести. Поскольку лопатки ориентированы радиально, скользящие поворотные соединения направляют кольцевой участок радиально и по азимуту. Другими словами, хотя все звенья играют роль в поддержании кольцевого участка, кольцевой участок по большей части удерживается шаровыми шарнирными соединениями.
Кроме того, поскольку поворотные соединения являются скользящими соединениями, движение кольцевого участка относительно его центрального положения вокруг оси турбомашины (т.е. радиальное движение кольцевого участка относительно его положения, сцентрированного на оси турбомашины) не создает или почти не создает сил в поворотных соединениях и в присоединенных к ним звеньях. Преимущественно это движение минимизируется, например, путем оптимизации углов и положений опорных точек в геометрической конфигурации кольцевого участка.
Дополнительно поскольку кольцевой участок удерживается вокруг его центрального положения по существу двумя шаровыми шарнирными соединениями, это позволяет достаточно точно позиционировать кольцевой участок относительно его центрального положения и обеспечить надежное и точное правление синхронным поворотом лопаток, в то же время допуская небольшие перемещения кольцевого участка вокруг его центрального положения. Было обнаружено, что центровка является оптимальной, и движения минимизируются, когда ось вращения поворотных шарниров на кольцевом участке и ось вращения лопаток пересекаются рядом с осью турбомашины.
Таким образом, управляющее устройство согласно изобретению позволяет избежать центрирования кольцевого участка, которое необходимо в устройствах по предшествующему уровню техники.
Дополнительно при отсутствии необходимости в таком центрировании отпадает и необходимость устанавливать дополнительные наладочные системы, встречающиеся в устройствах по предшествующему уровню техники. Таким образом, управляющее устройство согласно изобретению имеет меньший вес и является менее дорогим, чем устройства предшествующего уровня техники.
Следует отметить, что кольцевой участок приводится во вращение управляющим средством, например исполнительным механизмом, передающим тангенциальное движение на точку на кольцевом участке, и такое движение направляется двумя шаровыми шарнирными соединениями. Эти шаровые шарнирные соединения отстоят друг от друга в угловом направлении вокруг оси турбомашины, и такое разнесенное положение в сочетании с тем фактом, что прямолинейное движение точек шаровых шарнирных соединений между кольцевым участком и звеньями предотвращается, ограничивает движение кольцевого участка в основном поворотом вокруг оси турбомашины. Любое прямолинейное движение кольцевого участка в радиальном направлении приводит к его уходу от центра, но с точки зрения точности управления оно допустимо. В одном варианте для ограничения таких уводящих от центра движений и чтобы помощь шаровым шарнирным соединениям направлять вращение кольцевого участка, скольжение одного из скользящих поворотных соединений заблокировано так, чтобы сформировать только поворотное соединение.
Кроме того, шаровое шарнирное соединение добавляет вес и подвержено износу, который выше, чем износ скользящего поворотного соединения (или только поворотного соединения). За счет комбинирования использования небольшого количества шаровых шарнирных соединений для некоторых звеньев с использованием скользящих поворотных соединений (или только поворотных соединений) для других звеньев, можно снизить вес управляющего устройства и в то же время повысить его надежность по сравнению с управляющими устройствами по предшествующему уровню техники, в частности, с теми, в которых используются только шаровые шарнирные соединения или скользящие шаровые шарнирные соединения. Это позволяет повысить характеристики турбомашины, на которой установлено (или должно быть установлено) такое управляющее устройство.
Предпочтительно, два шаровых шарнирных соединения разнесены по азимуту на 90°.
Такой угловой интервал между двумя шаровыми шарнирными соединениями вокруг оси турбомашины служит для минимизации сил, действующих на каждое из соединений во время управления лопатками. Угловой интервал, равный 90°, позволяет каждому шаровому шарнирному соединению работать независимо от других для поддержки перпендикулярных компонентов каждой из сил, тем самым равномерно распределяя силы, в частности, в устройстве круглой формы.
Кроме того, такое расположение шаровых шарнирных соединений с интервалом 90° улучшает управление вращательным движением кольцевого участка.
Преимущественно два звена, соединенные с кольцевым участком через соответствующие шаровые шарниры, являются жесткими, тогда как звенья, соединенные с кольцевым участком через соответствующие скользящие поворотные соединения, являются более гибкими и способными упруго деформироваться.
Таким образом, понятно, что жесткие звенья не подвергаются упругой деформации при переходе от первого управляющего положения при движении кольца во второе управляющее положение, тогда как более гибкие звенья имеют тенденцию к упругой деформации, переходя из первого управляющего положения кольцевого участка во второе управляющее положение. Естественно, термин "более гибкие" используется для обозначения большей гибкости, чем у жестких звеньев. Другими словами, звенья, соединенные с кольцевым участком через скользящие поворотные соединения, являются более гибкими, чем звенья, соединенные с кольцевым участком через шаровые шарнирные соединения.
За счет упругой деформации звеньев, которые соединены с кольцевым участком через скользящее шарнирное соединение, принимают на себя силы, воздействующие на управляющее устройство. Кроме того, принимая на себя такие силы, эта упругая деформация обеспечивает, что движение устройства не будет заклиниваться, давая дополнительную степень свободы при относительном движении точек крепления этих звеньев. Это позволяет, в частности, допустить вращательные движения, которые ограничены скользящими поворотными соединениями, но допускаются шаровыми шарнирными соединениями. Следовательно, такие упругие деформации позволяют избежать чрезмерного напряжения на скользящем поворотном соединении и снизить его износ. Кроме того, такие деформации облегчают движение кольцевого участка при повороте между первым управляющим положением и вторым управляющим положением. Следовательно, силы, генерируемые управляющим исполнительным механизмом, могут быть меньше. Дополнительно смещение кольцевого участка от центра уменьшается, тем самым еще больше улучшая точность, с которой синхронизируется управление поворотом набора лопаток.
Дополнительно поскольку кольцевой участок удерживают именно шаровые шарнирные соединения, звенья, присоединенные к этим соединениям, являются достаточно жесткими для удержания кольцевого участка в положении, по существу, центрированном на оси турбомашины (т.е. центрированном на центрированном положении или рядом с ним) без упругой деформации, в частности, во время управляющего движения кольцевого участка.
Кроме того, поскольку жесткие звенья соединены с кольцевым участком через шаровые шарнирные соединения, на них не действует какой-либо торсионный момент, подобный тому, который приложен к звеньям, соединенным с кольцевым участком через скользящие поворотные соединения. Относительное вращательное движение точек крепления каждого жесткого звена компенсируется шаровым шарнирным соединением.
Следует отметить, что преимущество с точки зрения улучшения управления движением, которое дает применение шаровых шарнирных соединений, нивелируется их существенным весом и их склонностью к износу. Поэтому изобретатели разработали управляющее устройство, оснащенное минимальным количеством шаровых шарнирных соединений (т.е. двумя), которые соединены с жесткими звеньями, и в котором другие соединения являются скользящими поворотными соединениями, которые соединены с более гибкими и предпочтительно упругодеформируемыми при скручивании звеньями.
Преимущественно более гибкие звенья являются упругодеформируемыми при скручивании и при изгибе.
Это позволяет компенсировать любое заклинивание, которое может возникнуть в поворотных соединениях и в жестких звеньях, которые присоединены к ним, так, чтобы облегчить движение кольцевого участка, в то же время уменьшая механические напряжения рядом со скользящими поворотными соединениями и шаровыми шарнирными соединениями.
В нижеследующем описании термин "упругое звено" используется для обозначения звена, являющегося более гибким и упругодеформируемым, тогда как термин "жесткое звено" естественно обозначает звено, являющееся жестким.
Далее следует более подробное описание неограничивающего примера настоящего изобретения и его преимуществ. В описании даются ссылки на прилагаемые чертежи, на которых:
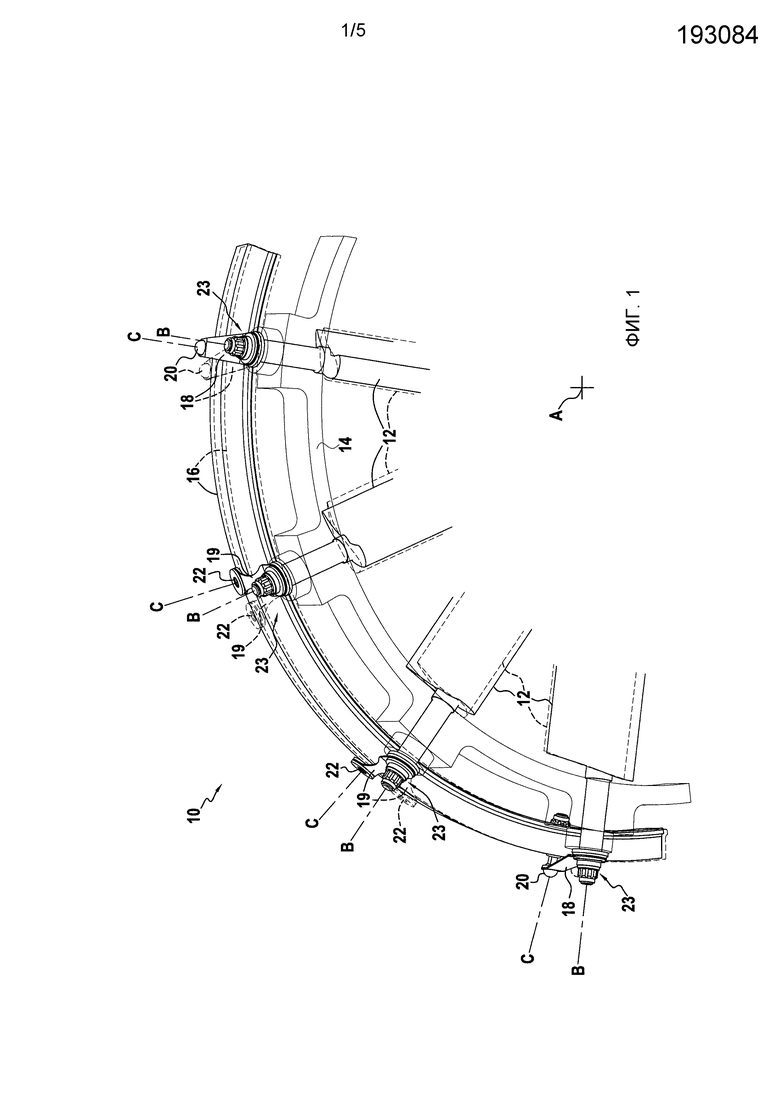
фиг. 1 - фрагментарный вид в перспективе варианта управляющего устройства согласно настоящему изобретению;
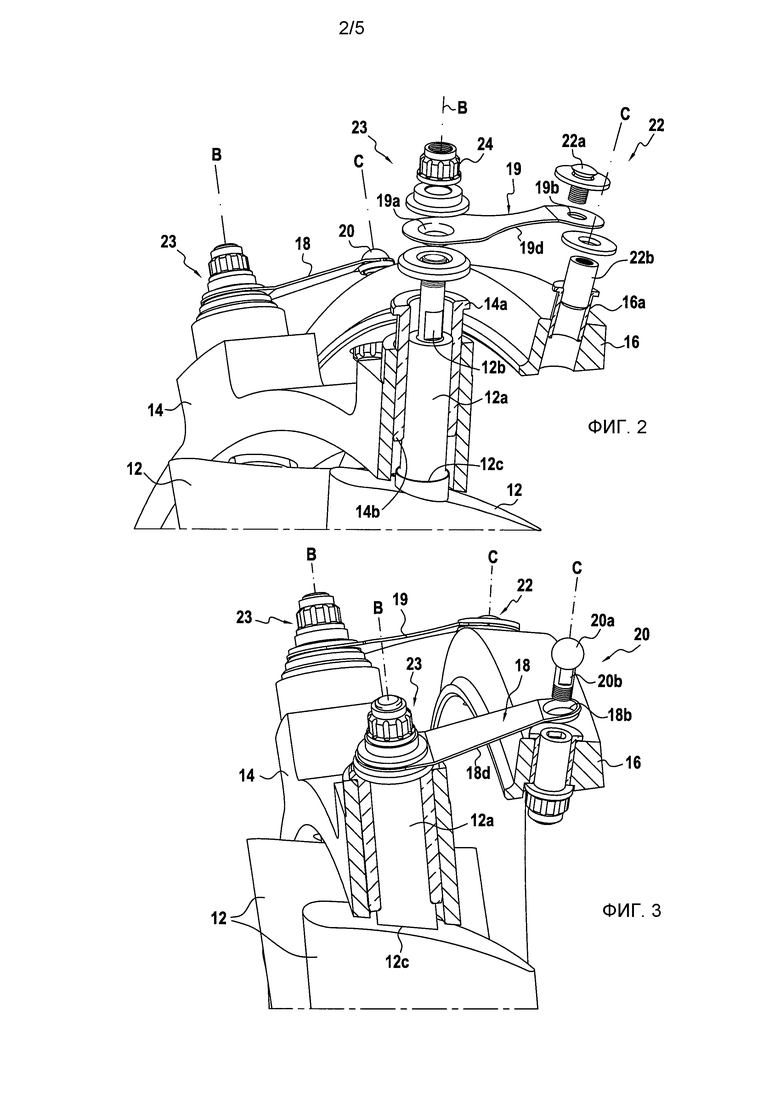
фиг. 2 - вид в перспективе с разнесением деталей узла, содержащего упругое звено со скользящим поворотным соединением, как показано на фиг. 1;
фиг. 3 - вид в перспективе с разнесением деталей узла, содержащего жесткое звено с шаровым шарнирным соединением с фиг. 1;
фиг. 4 - иллюстрация движения упругого звена во время поворота управляющего кольца;
фиг. 5 - вид по стрелке V с фиг. 4;
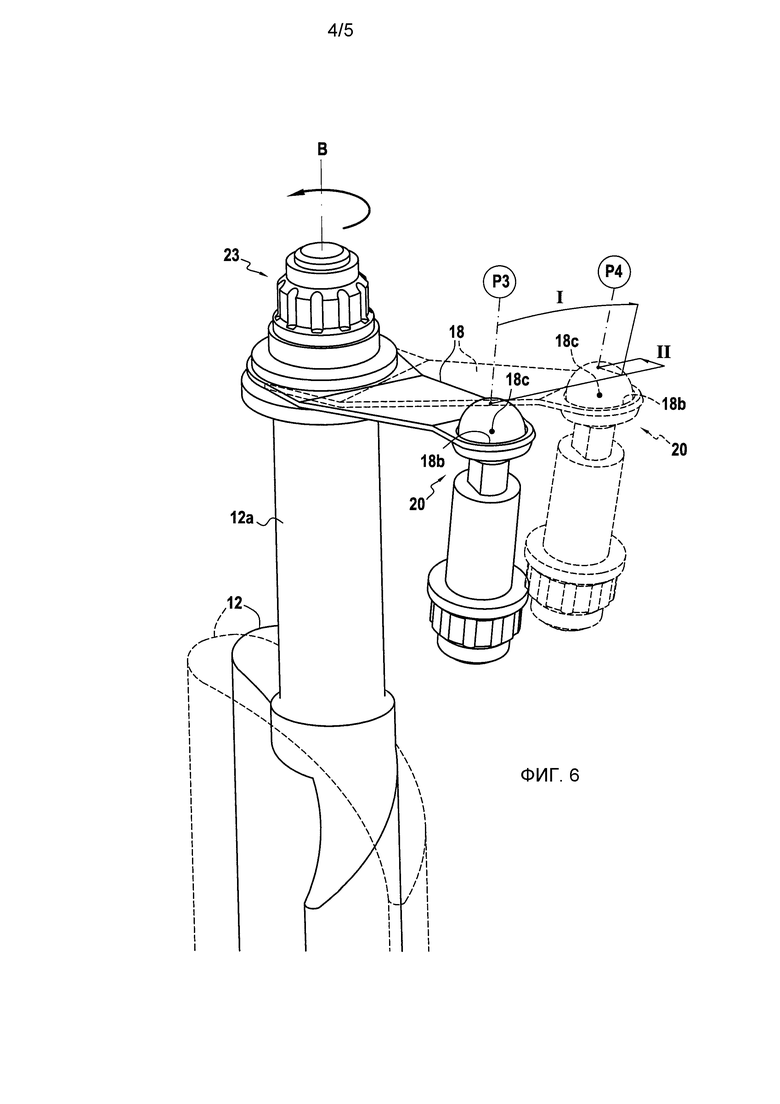
фиг. 6 - движение жесткого звена во время поворота управляющего кольца; и
фиг. 7 - турбомашина, оснащенная устройством управления поворотными лопатками согласно настоящему изобретению.
На фиг. 1 показан вариант устройства согласно настоящему изобретению для управления поворотными лопатками турбомашины. В этом варианте лопатки ориентированы радиально относительно оси турбомашины. Показанный вид является фрагментарным, так как полное устройство охватывает 360° вокруг оси А турбомашины (не показана). Ось А определяет продольное направление. Радиальное и азимутальное направления определены относительно оси А.
Управляющее устройство 10 содержит множество лопаток 12, которые установлены с возможностью поворота на статоре 14. Ось В поворота каждой лопатки 12 ориентирована в радиальном направлении. Каждая лопатка 12 установлена на статоре 14 через соединение 23, допускающее только поворот, т.е. шарнирное соединение, в котором допускается только движение (или степень свободы) поворота вокруг оси В.
Каждая лопатка 12 соединена с управляющим кольцом 16 звеном. Каждое жесткое звено 18 соединяет лопатку 12 с кольцом 16 через шаровое шарнирное соединение 20, а каждое упругое звено 19 соединяет лопатку 12 с кольцом 16 через скользящее поворотное соединение 22. Всего в устройстве 10 имеется два жестких звена 18 и два шаровых шарнирных соединения 20. Два жестких звена 18 отстоят друг от друга по азимуту на 90° вокруг оси А. Два жестких звена 18, таким образом, соединены с двумя лопатками 12, которые разнесены по азимуту на 90° и соединены с кольцом 16 двумя шаровыми шарнирными соединениями 20, которые также отстоят по азимуту на 90°.
Следует отметить, что движения (или степени свободы), допускаемые скользящим шарниром 22, являются движениями поворота вокруг оси С и прямолинейными перемещениями вдоль оси С.
Следует также отметить, что гибкость, приданная упругим звеньям 19 относительно жестких звеньев 18, определяется, в частности, их центральным профилем 19d, который уже, чем профиль 18d жестких звеньев (см. фиг. 2 и 3).
На фиг. 1 непрерывными линиями показано кольцо 16, сначала находящееся в первом управляющем положении, а штриховыми линиями показано кольцо 16, находящееся во втором управляющем положении. Для перевода кольца 16 из первого управляющего положения во второе исполнительный механизм (не показан), присоединенный к кольцу 16, передает прямолинейное движение к точке соединения между исполнительным механизмом и кольцом, которое направлено тангенциально к направлению азимута кольца, вследствие чего кольцо 16 смещается по азимуту при условии, что оно удерживается вокруг оси А шаровыми шарнирными соединениями 20. Следовательно, кольцо 16 поворачивается на определенный угол вокруг оси А.
Следует отметить, что во время движения по азимуту кольца 16, звенья 18 и 19, поддерживающие кольцо 16, поворачиваются, тем самым создавая прямолинейное движение кольца 16 вдоль оси А. В этом примере первое управляющее положение соответствует положению, в котором звенья 18 и 19 по существу перпендикулярны кольцу 16 и статору 14, а перемещение звеньев во второе положение заставляет кольцо 16 сместиться вдоль оси А в сторону статора 14. Поскольку статор 14 в турбомашине (не показана) неподвижен, кольцо 16 неизбежно перемещается относительно статора 14. Это движение показано стрелкой II на фиг. 4, 5 и 6.
На фиг. 2 представлен вид в перспективе с разнесением деталей системы соединения лопатки 12, установленной на корпусе 14 через шарнирное звено 23 с кольцом 16 через упругое звено 19 и скользящее поворотное соединение 22.
Лопатка 12 установлена на корпусе 14 с помощью шарнирного соединения 23. Стержень 12а лопатки 12 вставлен во втулку 14а статора 14, таким образом образуя поворотное соединение между статором 14 и лопаткой 12. Звено 19 также непосредственно соединено с лопаткой 12. Стержень 12а вставлен в проушину 19а звена 19 и заперт гайкой 24 и шайбами, зажатыми с обеих сторон тяги 19. Гайка 23 также позволяет блокировать прямолинейное движение лопатки 12 относительно статора 14, заставляя плечо 12c лопатки 12 прижиматься к концу 14b втулки 14а. Лыска 12b, сформированная на стержне 12а, взаимодействует за счет ответной формы с проушиной 19а звена 19, тем самым заставляя лопатку 12 поворачиваться вместе со звеном 19.
Проушина 19b, сформированная на конце звена 19, противоположном концу, на котором сформирована проушина 19а, соединена с кольцом 16 скользящим поворотным соединением 22. Винт 22а, проходящий сквозь проушину 19b, и шайбы, зажимающие звено 19, служат для соединения звена 19 со стержнем 22b. Винт 22а навинчен на стержень 22b, который вставлен во втулку 16а кольца 16. Стержень 22b может свободно скользить и поворачиваться во втулке 16а вдоль оси С и вокруг нее.
На фиг. 3 приведен вид в перспективе с разнесением деталей системы, соединяющей лопатку 12, установленную на корпусе 14 через поворотное соединение 23 с кольцом 16 через жесткое звено 18 и шаровое шарнирное соединение 20.
Поворотное соединение 23 аналогично описанному выше. На фиг. 3 элементы этого соединения 23 показаны в собранном состоянии.
Шаровое шарнирное соединение 20 соединяет жесткое звено 18 с кольцом 16. Сферический наконечник 20а резьбового стержня 20b, который привинчен к кольцу 16, находится в зацеплении с проушиной 18b жесткого звена 18 и взаимодействует за счет комплементарной формы с проушиной 18b. Таким образом, между жестким звеном 18 и кольцом 16 допускаются все движения в направлении вращения (т.е. все три степени свободы при вращении).
На фиг. 4 и 5 показаны движения конца упругого звена 19, соединенного с кольцом 16 (на фиг. 4 не показано). Сплошные линии соответствуют позиционированию элементов, когда кольцо 16 находится в первом управляющем положении по фиг. 1, а штриховые линии соответствуют позиционированию компонентов, когда кольцо находится во втором управляющем положении согласно фиг. 1.
Во время движения кольца 16 из первого управляющего положения во второе опорная точка 19c, соответствующая центру проушины 19b в упругом звене 19, проходит из положения Р1 в положение Р2.
Таким образом, для перехода из положения Р1 в положение Р2 общее движение опорной точки 19c состоит из двух элементарных движений. Это заставляет лопатку 12 поворачиваться, как показано стрелкой R (см. фиг. 4).
Первое элементарное движение представлено стрелкой I и соответствует повороту кольца 16 вокруг оси А турбомашины, возможно вместе с прямолинейным движением твердого тела (создаваемого исполнительным механизмом и жесткими звеньями 18). Это движение поворота вызывает крутильную деформацию упругих звеньев 19, представленную стрелкой Т. Ось С скользящего шарнира 22 сохраняет постоянное совмещение относительно кольца, но не относительно оси В шарнира 23, заставляя звено 19 выполнять поворотное движение вокруг оси, проходящей между двумя проушинами 19а и 19b (или оси звена 19). Проушины 19а и 19b не имеют возможности поворачиваться вокруг оси звена 19, и поэтому звено 19 подвергается кручению.
Следует отметить, что это движение I кольца 16 вызывается исполнительным механизмом (не показан) и жесткими звеньями 18, которые направляют кольцо 16.
Второе элементарное движение представлено стрелкой II и соответствует прямолинейному движению вдоль оси А турбомашины, как описано выше.
Также имеет место относительное движение между точкой 19c и кольцом 16. Это относительное движение представлено стрелкой III. Положение внешней периферии кольца 16 на фиг. 4 представлено линией 26 на стержне 22b. Во время движения I, даже если звено 19 является упругодеформируемым, оно стремится удержать точку 19c в той же плоскости, в которой оно находится, когда кольцо 16 находится в первом управляющем положении. Кроме того, во время движения I кольцо 16, соединенное со звеном 19 через скользящее поворотное соединение 22, отходит от плоскости, в которой точка 19 расположена в первом управляющем положении. Это соответствует обычному движению вперед и назад одной из координат точки в прямоугольной системе координат, расположенной на периферии колеса, когда колесо вращается. На фиг. 5 относительное движение III соответствует направленному вниз движению листа сечения кольца 16, расположенного в плоскости скользящего шарнирного соединения 22. Это относительное движение становится возможным за счет скольжения скользящего поворотного соединения 22.
Следует отметить, что вышеописанные движения I, II, III и деформация Т соответствуют разложению общего движения узла и общей деформации упругих звеньев 19 на более простые движения для упрощения понимания того, как узел перемещается. Тем не менее не следует забывать, что при своем общем движении упругие звенья 19 также подвергаются изгибной деформации (для компенсации любых движений твердого тела кольца 16 в направлении, показанном стрелкой III) так, что общая упругая деформация (т.е. при изгибе и при кручении) каждого упругого звена 19 служит для компенсации движения общего твердого тела кольца 16 (в направлениях по стрелкам I и III), передаваемого ему исполнительным механизмом и жесткими звеньями 18.
На фиг. 6 показано движение конца жесткого звена 18, которое соединено с кольцом 16 (не показано). Сплошные линии соответствуют позиционированию элементов, когда кольцо 16 находится в первом управляющем положении по фиг. 1, а штриховые линии соответствуют позиционированию элементов, когда кольцо 16 находится во втором управляющем положении по фиг. 1.
Во время движения кольца 16 из первого управляющего положения во второе опорная точка 18c, соответствующая центру проушины 18b жесткого звена 18, переходит из положения Р3 в положение Р4.
Таким образом, для перехода из положения Р3 в положение Р4 общее движение опорной точки 18c можно разложить на два элементарных движения I и II, аналогичных движениям, описанным выше и представленным стрелками I и II.
Поскольку звено 18 соединено с кольцом 16 через шаровое шарнирное соединение 20, звено 18 не подвергается действию крутящего момента. Следовательно, в отличие от звена 19 звено 18 не деформируется при кручении. Кроме того, звено 19 является достаточно жестким, чтобы не допустить деформации при изгибе при нормальной работе управляющего устройства 10. Другими словами, в этом примере для перехода из первого управляющего положения во второе управляющее положение звено 18 не испытывает упругих деформаций. Таким образом, в отличие от точки 19с упругого звена 19, как показано на фиг. 4 и 5, точка 18c жесткого звена 18 не движется по стрелке III по фиг. 4 и 5.
На фиг. 7 показана турбомашина 100, оснащенная вышеописанным устройством 10 для управления поворотными лопатками.
Без ограничения объема настоящего изобретения управляющее устройство может устанавливаться на вертолетные турбореактивные двигатели.

Управляющее устройство для управления поворотными лопатками турбомашины включает множество поворотных лопаток, ориентированных радиально относительно оси турбомашины, и кольцевой управляющий участок для управления поворотом лопаток. Каждая лопатка соединена с кольцевым управляющим участком звеном, причем кольцевой управляющий участок удерживается вокруг оси турбомашины набором звеньев. Два звена соединены с кольцевым участком шаровыми шарнирными соединениями, имеющими только три вращательные степени свободы, а каждое из других звеньев соединено с кольцевым участком скользящими поворотными соединениями, имеющими только две степени свободы - поступательную и вращательную. Другое изобретение группы относится к турбомашине, содержащей указанное выше управляющее устройство. Группа изобретений позволяет повысить надежность устройства управления поворотными лопатками турбомашины. 2 н. и 4 з.п. ф-лы, 7 ил.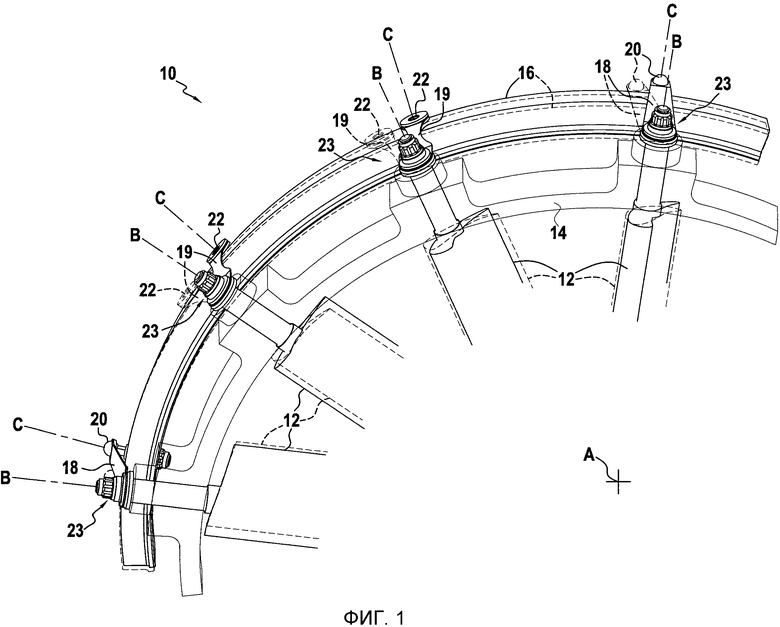
1. Управляющее устройство (10) для управления поворотными лопатками турбомашины (100), имеющей множество поворотных лопаток (12), распределенных по азимуту относительно оси (А) турбомашины на, по меньшей мере, 90°, при этом поворотные лопатки (12) ориентированы по существу радиально относительно оси (А) турбомашины, и кольцевой управляющий участок (16) для управления поворотом лопаток (12), причем каждая лопатка (12) соединена с кольцевым управляющим участком (16) звеном (18, 19), при этом кольцевой управляющий участок (16) удерживается вокруг оси (А) турбомашины набором звеньев (18, 19), отличающееся тем, что, по меньшей мере, два звена (18) соединены с кольцевым участком (16) соответствующими шаровыми шарнирными соединениями (20), имеющими только три вращательные степени свободы, а каждое из других звеньев (19) соединено с кольцевым участком соответствующими скользящими поворотными соединениями (22), имеющими только две степени свободы - поступательную и вращательную.
2. Устройство по п. 1, отличающееся тем, что два шаровых шарнирных соединения (20) отстоят друг от друга по азимуту на приблизительно 90°.
3. Устройство по п. 1, отличающееся тем, что два звена (18), соединенные с кольцевым участком (16) соответствующими шаровыми шарнирными соединениями (20), являются жесткими, а звенья (19), соединенные с кольцевым участком (16) соответствующими скользящими поворотными соединениями (22), являются более гибкими, обладая способностью к упругой деформации.
4. Устройство по п. 3, отличающееся тем, что более гибкие звенья (19) являются упругодеформируемыми при кручении и при изгибе.
5. Устройство по п. 1, отличающееся тем, что одно из скользящих поворотных соединений (22) удерживается от скольжения, чтобы сформировать только поворотное соединение.
6. Турбомашина (100), отличающаяся тем, что она содержит управляющее устройство (10) по любому из предшествующих пунктов.
| US 3376018 A, 02.04.1968 | |||
| Способ возведения асфальтобетонных покрытий | 1984 |
|
SU1276720A1 |
| ГЯА I | 0 |
|
SU308216A1 |
| Состав для закрепления пылящих поверхностей | 1984 |
|
SU1190067A1 |
| Способ правки стального проката | 2021 |
|
RU2784711C1 |
| US 4979874 A, 25.12.1990. | |||

