Настоящее изобретение относится к планетарному механизму и к способу производства такого планетарного механизма.
Как известно, вертолеты обычно оборудованы множеством коробок передач, предназначенных для передачи движения от одной или более турбин на роторы, основной ротор и/или хвостовой ротор, и/или от турбины на множество вспомогательных устройств, то есть, например, устройств, ответственных за подачу энергии, необходимой для работы бортового оборудования.
В авиационной отрасли, подобным образом, известно, что следует устанавливать коробку передач между турбиной и ведущим валом основного ротора.
Упомянутые коробки передач обычно используют, в качестве последней понижающей ступени, эпициклический мотор-редуктор, предназначенный для передачи мощности с отвечающими требованиям крутящим моментом и числом оборотов в минуту на вал ротора.
Эпициклический мотор-редуктор в основном содержит:
- первую шестерню, определенную в качестве «солнечной шестерни», которая может поворачиваться вокруг первой неподвижной оси;
- вторую, неподвижную шестерню, определенную в качестве «коронного зубчатого колеса», которая имеет вторую ось, совпадающую с первой осью; и
- множество шестерен, определенных в качестве «планетарных шестерен», которые зацепляются с солнечной шестерней и коронным зубчатым колесом и способны поворачиваться вокруг соответствующих третьих подвижных осей.
Планетарный механизм дополнительно содержит водило планетарной передачи, которое способно поворачиваться вокруг первой оси и присоединено к планетарным шестерням.
Таким образом, планетарные шестерни, в дополнение к повороту вокруг соответствующих третьих осей, вовлекаются в движение обращения вокруг первой оси солнечной шестерни водилом планетарной передачи.
В частности, солнечная шестерня присоединена к входному валу, и водило планетарной передачи используется в качестве выходного вала, присоединенного в валу ротора.
Другими словами, механическая мощность входит в планетарный механизм через солнечную шестерню и передается на вал ротора через водило планетарной передачи с надлежащими крутящим моментом и числом оборотов в минуту.
Углы профиля зубьев планетарных шестерен (и солнечной шестерни или коронного зубчатого колеса) обычно является большим, чем углы профиля зубьев обычных зубчатых передач. Более точно, угол профиля зубьев планетарных шестерен (и солнечной шестерни или коронного зубчатого колеса) обычно является большим, чем 25°, тогда как углы профиля зубьев обычных зубчатых передач имеют значение 20°.
Планетарный механизм известного типа, более того, традиционно наделяется размером таким образом, чтобы количество зубьев планетарных шестерен было равным полуразности между количеством зубьев коронного зубчатого колеса и солнечной шестерни. Таким образом, углы профиля, то есть углы профиля, используемые во время формирования огибающей поверхностью, совпадают с углами зацепления.
Обычные зубчатые передачи раскрыты, например, в публикации EP-A-1939493 и используют пары шестерен, которые имеют, по меньшей мере, одновременно двухзубое зацепление друг с другом, для того чтобы уменьшить нагрузки, действующие на каждый отдельный зуб шестерни.
Однако, в отличие от обычных зубчатых передач, зубья планетарных шестерен планетарных механизмов должны циклически зацепляться как с зубьями солнечной шестерни на первой стороне, так и с зубьями солнечной шестерни на второй стороне.
Следовательно, невозможно просто увеличить количество зубьев, зацепляющихся между планетарными шестернями и солнечной шестерней (или коронным зубчатым колесом), без предотвращения вышеупомянутых зубьев от вхождения в одновременное зацепление на их других сторонах с зубьями солнечной шестерни и коронного зубчатого колеса.
Вследствие этого зубчатый механизм известного типа имеет количество зубьев, зацепляющихся одновременно между планетарными шестернями и солнечной шестерней (или между планетарными шестернями и коронным зубчатым колесом), которое по существу равно одному.
Упомянутая компоновка обычно принимается в решениях известного типа в той мере, в какой зубья планетарных шестерен (и у коронного зубчатого колеса и солнечной шестерни) подвергаются нагрузкам, более низким, чем которым подвергаются зубья обычной шестерни, предназначенной для передачи такой же мощности.
Фактически, одна из особенностей планетарных механизмов заключается в том обстоятельстве, что нагрузка, которая переходит с солнечной шестерни на коронное зубчатое колесо, распределяется, по существу равномерным образом, на каждую планетарную шестерню.
Другими словами, упомянутая нагрузка распределяется по зубьям планетарных шестерен, зацепляющимся с соответствующими зубьями коронного зубчатого колеса и солнечной шестерни.
Особенно в авиационной отрасли ощущается необходимость в планетарном механизме, который будет в как можно большей степени увеличивать отношение между передаваемой мощностью и весом самого зубчатого механизма.
Такое отношение очевидно имеет величайшую важность в авиационной отрасли.
В заключение, также в отрасли ощущается потребность в передаче движения на ведущий вал ротора как можно более бесшумным образом.
Задачей настоящего изобретения является создание планетарного механизма для летательного аппарата, который будет удовлетворять, по меньшей мере, одному из требований, изложенных выше, простым и экономически выгодным образом.
Вышеупомянутая задача решается посредством создания планетарного механизма для летательного аппарата, способного к полету в неподвижной точке, содержащего:
- солнечную шестерню, которая поворачивается вокруг первой оси и содержит множество первых зубьев;
- неподвижное коронное зубчатое колесо, содержащее множество вторых зубьев; и,
- по меньшей мере, две планетарных шестерни, каждая из которых содержит множество третьих зубьев, причем каждая планетарная шестерня зацепляется с коронным зубчатым колесом и солнечной шестерней и поворачивается вокруг соответствующих вторых осей, которые, в свою очередь, способны оборачиваться вокруг первой оси;
- при этом, по меньшей мере, два из третьих зубьев зацепляются одновременно с соответствующими вторыми зубьями, и дополнительные два из третьих зубьев зацепляются одновременно с соответствующими первыми зубьями;
- упомянутые третьи зубья содержат первую сторону и вторую сторону, которые, соответственно, имеют первый угол профиля и второй угол профиля, которые отличны друг от друга; и
- количество третьих зубьев каждой из планетарных шестерен отлично от абсолютного значения полуразности между количеством первых зубьев упомянутой солнечной шестерни и количеством вторых зубьев.
Настоящее изобретение, подобным образом, относится к способу для производства планетарного механизма для летательного аппарата, способного к полету в неподвижной точке, причем планетарный механизм содержит:
- солнечную шестерню, которая поворачивается вокруг первой оси и содержит множество первых зубьев;
- неподвижное коронное зубчатое колесо, содержащее множество вторых зубьев; и,
- по меньшей мере, две планетарных шестерни, каждая из которых содержит множество третьих зубьев, причем каждая планетарная шестерня зацепляется с коронным зубчатым колесом и солнечной шестерней и поворачивается вокруг соответствующих вторых осей, которые, в свою очередь, способны оборачиваться вокруг упомянутой первой оси;
причем способ включает этапы, на которых:
- устанавливают, по меньшей мере, два из третьих зубьев, так чтобы они одновременно зацеплялись с соответствующими вторыми зубьями, и дополнительные два из третьих зубьев так, чтобы они одновременно зацеплялись с соответствующими первыми зубьями;
- обеспечивают первую сторону и вторую сторону третьих зубьев, соответственно, первым углом профиля и вторым углом профиля, которые отличны друг от друга; и
- обеспечивают количество третьих зубьев каждой из планетарных шестерен, отличное от абсолютного значения полуразности между количеством первых зубьев солнечной шестерни и количеством вторых зубьев коронного зубчатого колеса.
Для лучшего понимания настоящего изобретения предпочтительные варианты осуществления описаны в дальнейшем в качестве неограничивающего примера и со ссылкой на прилагаемые чертежи, на которых:
фиг.1 - летательный аппарат, в частности вертолет, содержащий планетарный механизм согласно настоящему изобретению;
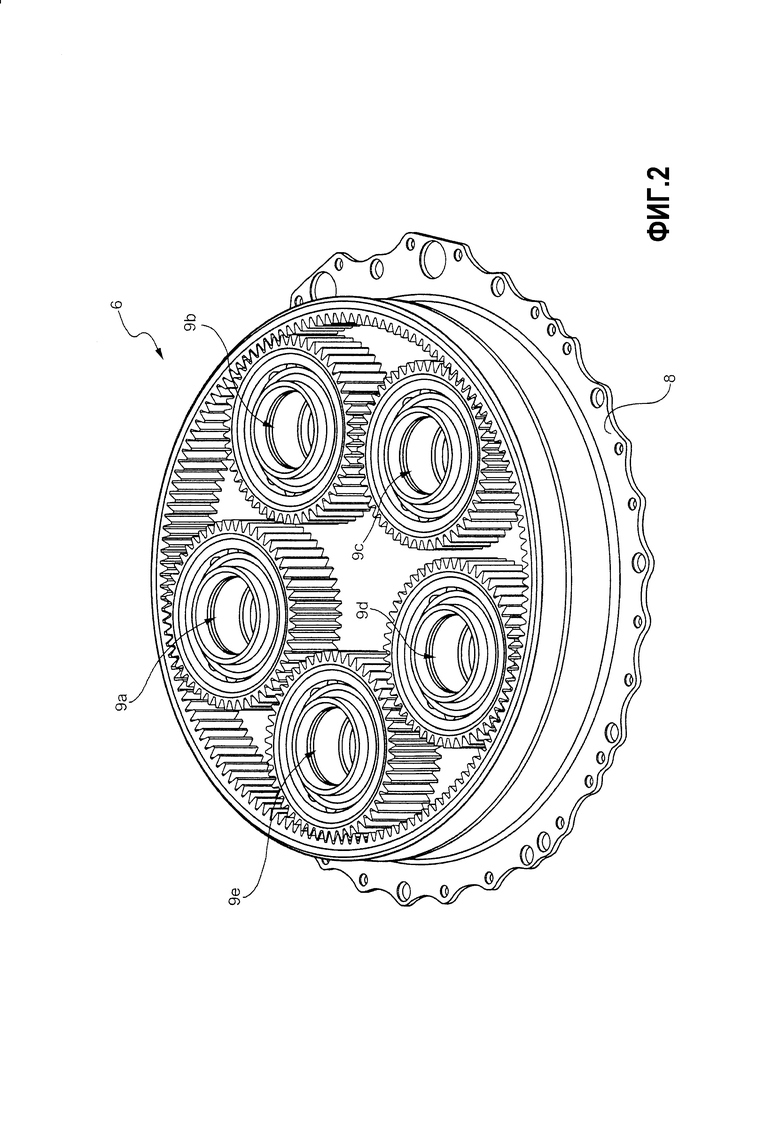
фиг.2 - вид в перспективе планетарного механизма, включенного в летательный аппарат с фиг.1, с частями, удаленными по соображениям разборчивости;
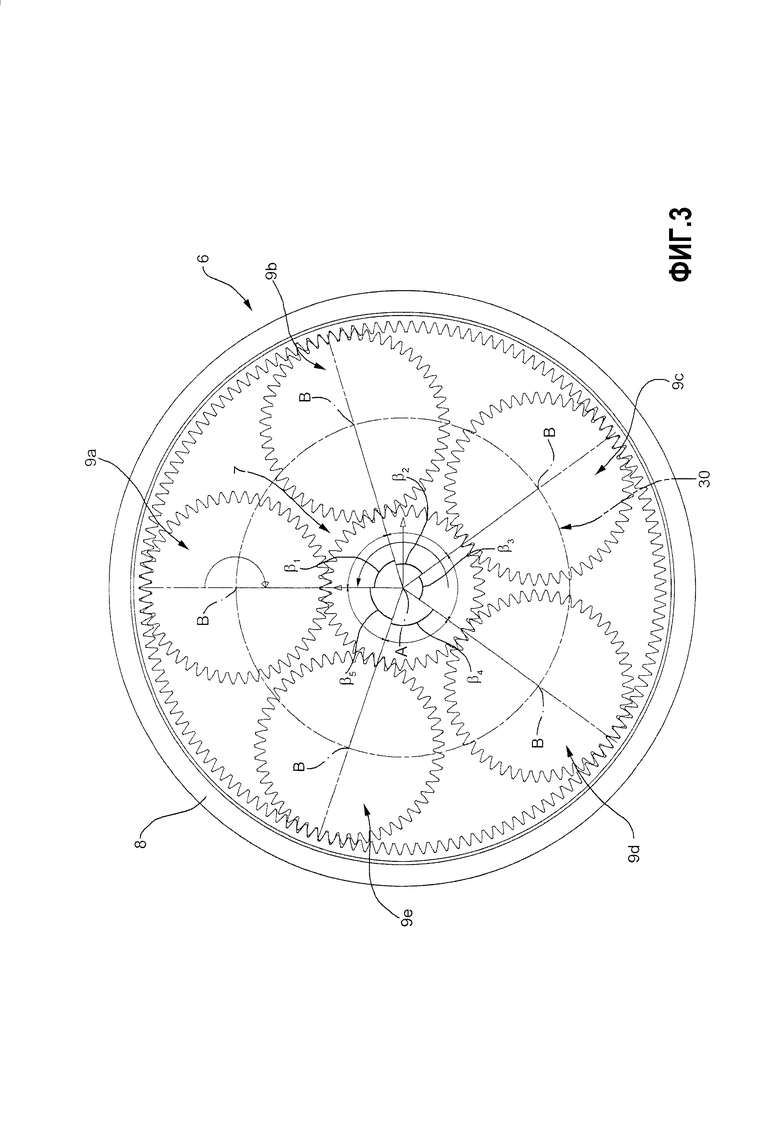
фиг.3 - поперечное сечение по линии II-II с фиг.1;
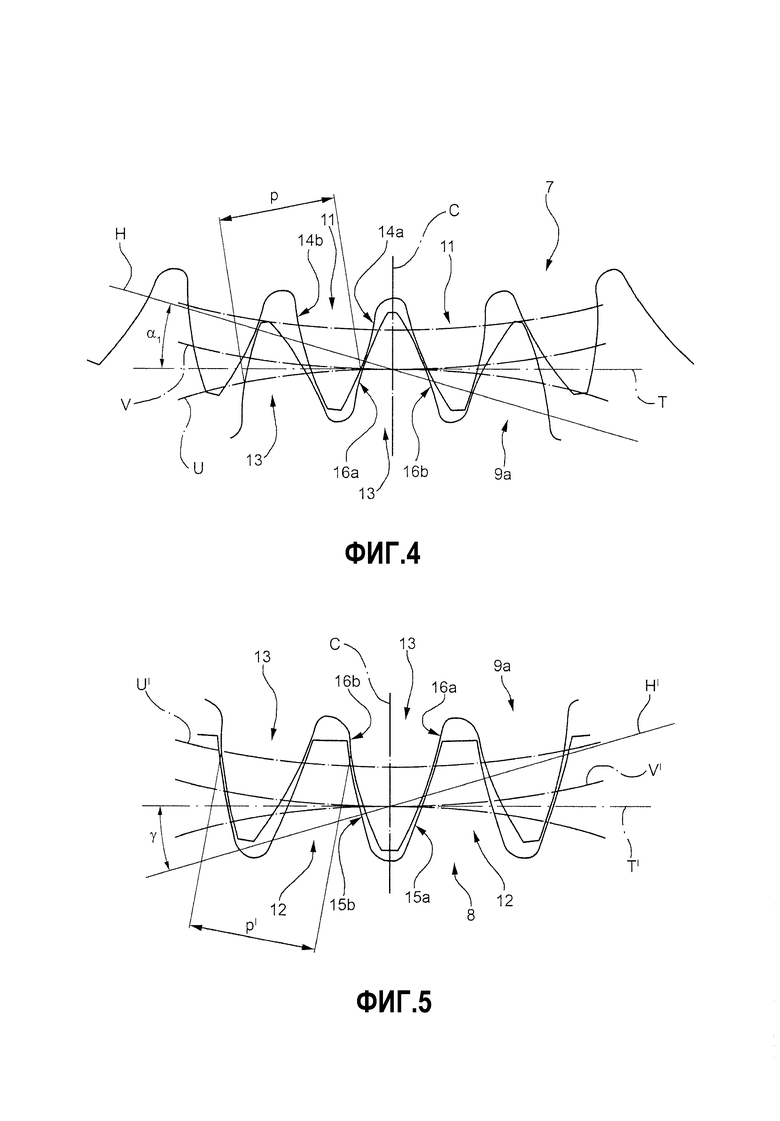
фиг.4 и 5 - виды в заметно увеличенном масштабе соответствующих частей с фиг.1;
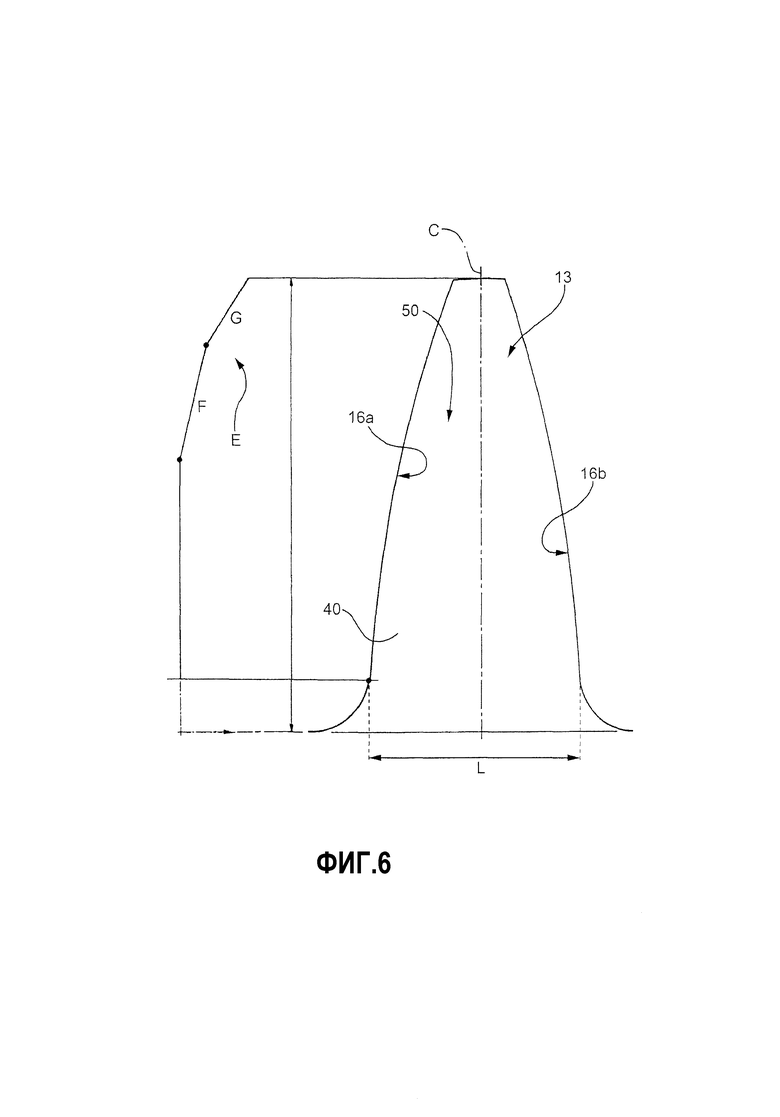
фиг.6 - подробный вид вторых компонентов первой подсистемы с фиг.1;
фиг.7 - вид в увеличенном масштабе части с фиг.1.
На фиг.1 ссылочной позицией 1 обозначен летательный аппарат, способный к полету в неподвижной точке; причем в рассматриваемом случае проиллюстрирован вертолет.
Вертолет 1, в основном, содержит фюзеляж 2, основной ротор 4, установленный на фюзеляже 2 таким образом, чтобы он мог поворачиваться в первой плоскости, с тем чтобы обеспечивать действие для поддерживания всего вертолета в полете, и хвостовой ротор 3, установленный на одном конце фюзеляжа 2. В частности, ротор 3 способен поворачиваться во второй плоскости, поперечной по отношению к первой плоскости для противостояния крутящему моменту, вырабатываемому самим ротором 4 на фюзеляже 2.
Вертолет 1 дополнительно содержит основную коробку 5 передач, предназначенную для передачи движения от турбины (не проиллюстрирована) на ведущий вал (не проиллюстрирован) ротора 4, и вспомогательную коробку передач, приводимую в движение коробкой 5 передач и приводящую в движение ротор 3.
Коробка 5 передач дополнительно содержит последнюю ступень, в основном, сформированную планетарным механизмом 6, которая передает мощность ведущего вала 4 ротора с надлежащими значениями крутящего момента и угловой скорости.
В проиллюстрированном рассматриваемом случае планетарный механизм 6 является мотор-редуктором.
Как показано на фиг.3 и 4, планетарный механизм 6, в основном, содержит:
- солнечную шестерню 7, содержащую множество зубьев 11, которая может поворачиваться вокруг оси A и действующим образом присоединена к входному валу (не проиллюстрирован) ступени 6;
- коронное зубчатое колесо 8, содержащее множество зубьев 12 и проходящее вокруг оси A; и
- множество планетарных шестерен 9a, 9b, 9c, 9d, 9e, содержащих соответствующие множества зубьев 13, которые могут поворачиваться вокруг соответствующих осей B, параллельных оси A, и зацепляются с солнечной шестерней 7 и коронным зубчатым колесом 8.
В проиллюстрированном рассматриваемом случае, коронное зубчатое колесо 8 имеет диаметр, больший, чем у солнечной шестерни 7.
Планетарный механизм 6 дополнительно содержит водило 30 планетарной передачи (схематически представленное на фиг.3), которое может поворачиваться вокруг оси A, присоединенное непосредственно к ведущему валу (не проиллюстрирован) ротора 4 и присоединенное к планетарным шестерням 9a, 9b, 9c, 9d, 9e.
Таким образом, каждая планетарная шестерня 9a, 9b, 9c, 9d, 9e поворачивается вокруг своей собственной оси B и описывает движение оборачивания вокруг оси A.
Механическая мощность, более того, входит в планетарный механизм 6 на солнечной шестерне 7 и выходит из него, в направлении вала 4 ротора, на водиле 30 планетарной передачи, с надлежащими крутящим моментом и числом оборотов в минуту.
В частности, каждый зуб 11, 12, 13 содержит соответствующую пару сторон 14a, 14b; 15a, 15b; 16a, 16b.
Стороны 14a, 14b; 15a, 15b; 16a, 16b каждого зуба 11, 12, 13 установлены на противоположных сторонах оси C соответствующего зуба 11, 12, 13.
Более точно, следуя за вращением каждой планетарной шестерни 9a, 9b, 9c, 9d, 9e вокруг соответствующей оси B и обращением каждой планетарной шестерни 9a, 9b, 9c, 9d, 9e вокруг оси A, стороны 16a зубьев 13 циклически взаимодействуют со сторонами 14a зубьев 11 солнечной шестерни 7, а стороны 16b зубьев 13 циклически взаимодействуют со сторонами 15b зубьев 12 коронного зубчатого колеса 8.
Преимущественно, каждая планетарная шестерня 9a, 9b, 9c, 9d, 9e содержит, по меньшей мере, два зуба 13, зацепляющихся одновременно с соответствующими зубьями 11 солнечной шестерни 7, и два дополнительных зуба 13, зацепляющихся одновременно с соответствующими зубьями 12 коронного зубчатого колеса 8. Углы α1, α2 профиля сторон 16a, 16b зубьев 13 отличны друг от друга, и количество ZP зубьев 13 каждой планетарной шестерни 9a, 9b, 9c, 9d, 9e является меньшим, чем абсолютное значение полуразности между количеством ZS зубьев 11 солнечной шестерни 7 и количеством ZS зубьев 12 коронного зубчатого колеса 8.
В ходе настоящего описания, термин «угол профиля», α1, α2, указывает угол профиля идеального зубчатого венца, которым снабжены солнечная шестерня 7, коронное зубчатое колесо 8 и планетарные шестерни 9a, 9b, 9c, 9d, 9e, причем идеальный зубчатый венец имеет такой же модуль, как солнечная шестерня 7, коронное зубчатое колесо 8 и планетарные шестерни 9a, 9b, 9c, 9d, 9e.
Точнее, угол α1 профиля, связанный со стороной 16a, является меньшим, чем угол α2 профиля, связанный со стороной 16b. Таким образом, зубья 13 симметричны.
В проиллюстрированном рассматриваемом случае угол α1 профиля равен 19°, а угол α2 профиля равен 25°.
Нижнее значение угла α1 профиля дает возможность увеличиваться количеству зубьев 13, 11, одновременно зацепляющихся между планетарными шестернями 9a, 9b, 9c, 9d, 9e и солнечной шестерней 7.
Уменьшение угла α1 профиля определяет увеличение напряжения при изгибе, являющегося результатом нагрузки, действующей на зуб 13. Это, в основном, происходит вследствие того обстоятельства, что напряжение при изгибе пропорционально тангенциальной силе, обмениваемой между зубьями 13 и зубьями 12 и, следовательно, пропорционально косинусу угла α1 профиля.
Однако увеличение угла α2 профиля определяет увеличение прочности зуба 13 на изгиб, которая компенсирует вышеупомянутое увеличение напряжения при изгибе. Фактически, увеличение угла α2 профиля определяет увеличение сопротивляющегося сечения L, а отсюда прочности на изгиб зубьев 13. Другими словами, увеличение угла α2 профиля делает корневой участок 40 зуба 13 установленный между осью C и стороной 16b более коротким и толстым.
Количество ZP зубьев 13 каждой планетарной шестерни является меньшим, чем абсолютное значение полуразности между количеством ZS зубьев 12 и количеством ZC зубьев 11.
Другими словами,
Кроме того, в частности, абсолютное значение полуразности между количеством ZS зубьев 13 и количеством ZC зубьев 11 является большим, чем у количества ZP зубьев 13, на значение, находящееся в диапазоне от 2 до 4.
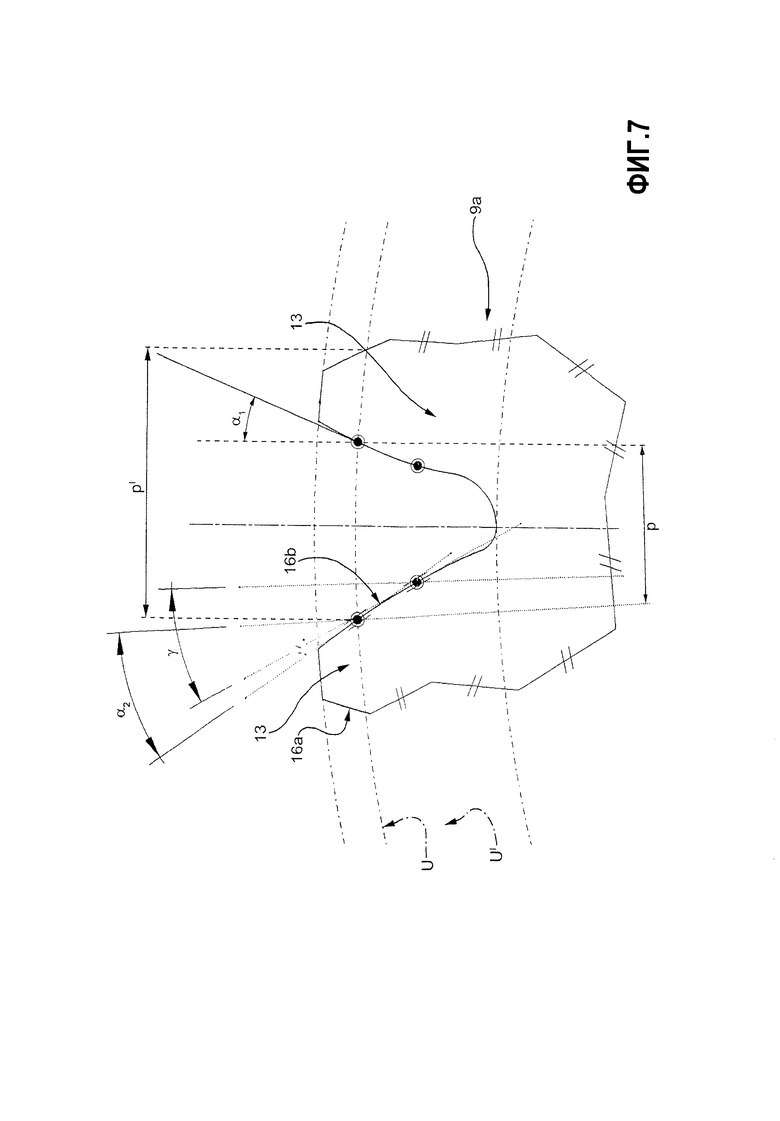
Как показано на фиг.7, вследствие уменьшения количества зубьев ZP,
- стороны 16a имеют делительную окружность U, совпадающую с основной окружностью самих сторон 16a; и
- стороны 16b имеют вторую делительную окружность U', имеющую диаметр, меньший чем основная окружность сторон 16a.
Под термином «делительные окружности» U, U' подразумеваются окружности, имеющие свой центр на осях B планетарных шестерен 9a, 9b, 9c, 9d, 9e, которые катятся без скольжения по соответствующим делительным окружностям V, V', которые соответственно соосны с солнечной шестерней 7 и коронным зубчатым колесом 8.
Под термином «основные окружности» подразумеваются окружности, которые имеют свой центр на осях B планетарных шестерен 9a, 9b, 9c, 9d, 9e, которые катятся без скольжения по зубчатым венцам идеального перекрытия, которые наделены размерами номинальным образом и имеют такой же модуль, как зубья 13, и углы α1, α2 профиля на сторонах их самих, которые взаимодействуют, соответственно, со сторонами 16a, 16b зубьев 13.
Следовательно, угол α1 профиля совпадает с углом зацепления, соответствующим зацеплению между сторонами 16a зубьев 13 и сторонами 14a зубьев 11.
Взамен, угол α2 профиля является меньшим, чем угол γ зацепления, соответствующий зацеплению между сторонами 16b зубьев 13 и сторонами 15b зубьев 12.
В частности, угол γ зацепления является углом, который существует, на делительной окружности планетарных шестерен 9a, 9b, 9c, 9d, 9e, между касательной к стороне 16b и линией, присоединяющей соответствующие оси B к точке пересечения между делительной окружностью планетарных шестерен 9a, 9b, 9c, 9d, 9e и самой стороной 15b (см. фиг.5 и 7).
Угол γ зацепления является меньшим, чем угол α2 профиля, на значение, находящееся в диапазоне от 4 до 8°.
В проиллюстрированном рассматриваемом случае угол γ зацепления, связанный со стороной 16b, находится в диапазоне от 17° до 21°.
Таким образом, каждая планетарная шестерня 9a, 9b, 9c, 9d и 9e имеет больше, чем два соответствующих зуба 13, одновременно зацепляющихся с соответствующими зубьями 11 коронного зубчатого колеса 8 также с углом α2 профиля приблизительно 25°.
Планетарные шестерни 9a, 9b, 9c, 9d, 9e, солнечная шестерня 7 и коронное зубчатое колесо 8 сконструированы с тем, чтобы иметь коэффициент перекрытия, больший, чем 2, то есть таким образом, чтобы каждая планетарная шестерня 9a, 9b, 9c, 9d, 9e представляла более чем два зуба 13, зацепляющихся с зубьями 11 солнечной шестерни 7, и более чем два зуба 13, зацепляющихся с зубьями 12 коронного зубчатого колеса 8.
В частности, термин «коэффициент перекрытия» указывает отношение между длиной дуги перекрытия и шагом p, p' по дуге делительной окружности, связанным с зацеплением каждой планетарной шестерни 9a, 9b, 9c, 9d, 9e с солнечной шестерней 7 и коронным зубчатым колесом 8.
В частности, дуга перекрытия является дугой, измеренной вдоль делительной окружности U (U') каждой планетарной шестерни 9a, 9b, 9c, 9d, 9e между двумя точками пересечения между линией действия H (H') и окружностями вершин зубьев 13 самой планетарной шестерни 9a, 9b, 9c, 9d, 9e и зубьями 11 солнечной шестерни 7 (зубьями 12 коронного зубчатого колеса 8). Как известно, линия действия H (H') является прямой линией, вдоль которой зубья 13, 12 (11) планетарных шестерен 9a, 9b, 9c, 9d, 9e и солнечной шестерни 7 (коронного зубчатого колеса 8) обмениваются взаимными силами действия и противодействия. Линия действия H, H' наклонена под углом α1 профиля (углом γ зацепления) относительно касательной T, T', общей для делительных окружностей U, V (U', V') каждой планетарной шестерни 9a, 9b, 9c, 9d, 9e и солнечной шестерни 7 (коронного зубчатого колеса 8).
Шаг p, p' по дуге делительной окружности, взамен, является расстоянием между двумя гомологическими точками следующих друг за другом зубьев, измеренным на делительной окружности U, U' каждой планетарной шестерни 9a, 9b, 9c, 9d, 9e (см. фиг.4, 5 и 7).
Как известно, коэффициент перекрытия, то есть, количество зубьев 13, 11 (12), зацепляющихся одновременно, увеличивается по мере того, как уменьшается угол α1 (γ) профиля. Более того, при всех других равных параметрах, коэффициент перекрытия является большим для внутренних шестерен, к примеру, в случае зацепления между планетарными шестернями 9a, 9b, 9c, 9d, 9e и коронным зубчатым колесом 8, чем у внешних шестерен, таких как в случае зацепления между планетарными шестернями 9a, 9b, 9c, 9d, 9e и солнечной шестерней 7.
Благодаря тому обстоятельству, что делительные окружности U, U' имеют разные соответствующие диаметры, коэффициент перекрытия, соответствующий сопряжению между сторонами 16a, 14a (то есть, сопряжению между зубьями 13, 11), отличен от коэффициента перекрытия, соответствующего сопряжению между сторонами 16b, 15b (то есть, сопряжению между зубьями 13, 12).
В проиллюстрированном рассматриваемом случае коэффициенты перекрытия сторон 16a, 14a и 16b, 15b оба являются большими, чем 2,5.
Планетарный механизм 6 содержит пять планетарных шестерен 9a, 9b, 9c, 9d, 9e, которые могут поворачиваться вокруг соответствующих осей B, параллельных оси A.
Подробно, планетарные шестерни 9a, 9b; 9b, 9c; 9c, 9d; 9d, 9e; 9e, 9a установлены последовательно друг за другом вокруг оси A.
Каждая пара непосредственно следующих друг за другом планетарных шестерен 9a, 9b; 9b, 9c; 9c, 9d; 9d, 9e; 9e, 9a определяет фазовый угол β1, β2, β3, β4, β5 (см. фиг.3).
Подробно, фазовый угол β1 (β2, β3, β4, β5) определен полулиниями, соединяющими ось A с осями B планетарных шестерен 9a, 9b (9b, 9c; 9c, 9d; 9d, 9e; 9e, 9a). Вышеупомянутые полулинии начерчены перпендикулярно осям A, B.
Планетарные шестерни 9a, 9b, 9c, 9d, 9e установлены таким образом, чтобы они не были разнесены под равными углами вокруг оси A. Другими словами, фазовые углы β1, β2, β3, β4, β5 не все являются одинаковыми друг с другом и равными 12°, то есть отношению между полной окружностью и количеством планетарных шестерен 9a, 9b, 9c, 9d, 9e.
Точнее, фазовые углы β1, β2, β3, β4, β5 установлены, проходя в направлении по часовой стрелке вокруг оси A, согласно последовательности β1, β2, β3, β4, β5.
Фазовые углы β1, β4 одинаковы друг с другом и имеют величину, большую, чем отношение между полной окружностью и количеством планетарных шестерен 9a, 9b, 9c, 9d, 9e.
Фазовые углы β2, β3, β5 одинаковы друг с другом и имеют величину, меньшую, чем отношение между полной окружностью и количеством планетарных шестерен 9a, 9b, 9c, 9d, 9e.
Зубья 11 и 12 солнечной шестерни 7 и коронного зубчатого колеса 8 идентичны зубьям 13 планетарных шестерен 9a, 9b, 9c, 9d, 9e; то есть они имеют стороны 14a, 14b; 15a, 15b, которые обладают углами профиля, отличными друг от друга и соответственно равными α1, α2.
Как показано на фиг.6, стороны 14a, 14b; 15a, 15b; 16a, 16b каждого зуба 11, 12, 13 имеют соответствующие концевые участки 50, противоположные соответствующим корневым участкам 40, которые наделены задним углом относительно соответствующих начальных эвольвентных профилей. В частности, эпюры расстояний между точками профиля сторон 14a, 14b; 15a, 15b; 16a, 16b и соответствующими теоретическими эвольвентами, измеренных перпендикулярно оси соответствующих зубьев 11, 12, 13, определены соответствующими прерывистыми линиями E, сформированными двумя сегментами F, G, наклонными относительно друг друга, как проиллюстрировано в заявке № 06425878.3 на выдачу европейского патента, содержание которых включено в настоящую патентную заявку. Взамен, корневые участки 40 каждого зуба 11, 12, 13 профилированы в качестве соответствующих эвольвент окружности.
При использовании, мощность входит в планетарный механизм 6 через солнечную шестерню 7, которая поворачивается вокруг оси A.
Вращение солнечной шестерни 7 определяет вращение планетарных шестерен 9a, 9b, 9c, 9d, 9e вокруг своих собственных осей B и обращение самих планетарных шестерен 9a, 9b, 9c, 9d, 9e вокруг оси A. Планетарные шестерни 9a, 9b, 9c, 9d, 9e также зацепляются с неподвижным коронным зубчатым колесом 8 через зубья 13, 11 (см. фиг.4).
Водило 30 планетарной передачи, таким образом, поворачивается вокруг оси B, передавая мощность с соответствующим требованиям числом оборотов в минуту на вал 4 ротора.
Из исследования планетарного механизма 6 и способа согласно настоящему изобретению, очевидны преимущества, которые оно обеспечивает.
В частности, планетарный механизм 6 представляет синергетическую комбинацию конструктивных характеристик, которые дают отношению между мощностью, передаваемой на вал ротора, возможность увеличиваться при условии одного и того же веса.
Достижение вышеупомянутых преимуществ имеет крайнюю важность в авиационной отрасли, где любая экономия веса автоматически означает снижение потребления или увеличение полезной нагрузки.
Более точно, конструктивные параметры планетарного механизма 6 были спроектированы заявителем таким образом, чтобы гарантировать, что каждая планетарная шестерня 9a, 9b, 9c, 9d, 9e будет иметь, по меньшей мере, два зуба 13, одновременно зацепляющихся с соответствующими зубьями 11 солнечной шестерни 7, и, по меньшей мере, два дополнительных зуба 13, одновременно зацепляющихся с соответствующими зубьями 12 коронного зубчатого колеса 8.
В частности, конструктивные параметры планетарного механизма 6 были спроектированы таким образом, чтобы коэффициент перекрытия зубьев 13, 11 и зубьев 13, 12 был большим, чем 2,5.
Таким образом, механические напряжения, получающиеся от нагрузок, действующих на зубьях 11, 12, 13, радикально уменьшаются по сравнению с планетарными механизмами известного типа, где коэффициент перекрытия по существу заключен между 1 и 2.
Более подробно, прежде всего, углы α1, α2 профиля сторон 16a, 16b зубьев 13 отличны друг от друга.
Меньший угол α1 профиля обеспечивает возможность наличия в распоряжении двузубого зацепления 11, 13, одновременно между каждой планетарной шестерней 9a, 9b, 9c, 9d, 9e и солнечной шестерней 7.
Таким образом, гарантируется, что коэффициент перекрытия, связанный с зацеплением между зубьями 13, 11, является большим, чем 2,5.
Одновременно, уменьшение угла α1 профиля определяет увеличение тангенциальной составляющей силы, действующей на зуб 13. Фактически, упомянутая составляющая пропорциональна косинусу угла α1 профиля. Однако благодаря тому обстоятельству, что угол α2 профиля является большим, чем угол α1 профиля, зубья 13 имеют сопротивляющееся сечение L, а отсюда прочность на изгиб, увеличенные по сравнению с теми, которые получались бы при угле α1 профиля тоже для сторон 16b.
Следовательно, зубья 13 могут выдерживать увеличенное напряжение при изгибе.
Другими словами различие углов α1, α2 профиля обеспечивает коэффициентам перекрытия, связанным с зацеплением между зубьями 13, 11, возможность увеличиваться на обеих сторонах 16a, 16b, и, следовательно, обеспечивает возможность уменьшения механических напряжений, являющихся результатом нагрузок, действующих на сами зубья 13, 11, без ухудшения прочности на изгиб зубьев 13.
На втором месте, количество ZP зубьев 13 является меньшим, чем абсолютное значение полуразности между количеством ZS зубьев 11 и ZC коронного зубчатого колеса 12, и, следовательно, является меньшим, чем количество зубьев, предусмотренное для планетарных шестерен согласно традиционному установлению размеров.
Отсюда следует, что диаметр планетарных шестерен 9a, 9b, 9c, 9d, 9e является меньшим, чем диаметр, который получался бы предписанием касания делительных окружностей планетарных шестерен 9a, 9b, 9c, 9d, 9e и солнечной шестерни 7, а также коронного зубчатого колеса 8.
Следовательно, угол γ зацепления между планетарными шестернями 9a, 9b, 9c, 9d, 9e и коронным зубчатым колесом 8 является меньшим, чем угол α2 профиля сторон 16b (см. фиг.7).
Следовательно, даже если угол α2 профиля является гораздо большим, чем угол α1 профиля, угол γ зацепления у зацепления между зубьями 13 планетарных шестерен 9a, 9b, 9c, 9d, 9e и зубьями 12 коронного зубчатого колеса 8 чрезвычайно мал.
Таким образом, гарантируется, что каждая планетарная шестерня 9a, 9b, 9c, 9d, 9e представляет два зуба 13, также одновременно зацепляющихся с соответствующими зубьями 12 коронного зубчатого колеса 8.
Было также замечено, что количество зубьев 13, 11 (и 13, 12), зацепляющихся одновременно, большее чем два, различие углов α1, α2 профиля и выбор количества ZP зубьев 13, меньшего чем абсолютное значение полуразности между количествами ZS, ZC зубьев 11, 12, производит, в качестве синергетического эффекта, уменьшение уровней шума планетарного механизма 6 по сравнению с планетарными механизмами известного типа, описанными во вступительной части настоящего описания.
Также было отмечено, что как коэффициенты перекрытия между планетарными шестернями 9a, 9b, 9c, 9d, 9e и солнечной шестерней 7 (или коронным зубчатым колесом 8), так и бесшумность планетарного механизма 6 увеличены посредством того обстоятельства, что зубья 11, 12, 13 имеют концевые участки 50, которые наделены задним углом по отношению к соответствующим начальным эвольвентам.
Планетарные шестерни 9a, 9b, 9c, 9d, 9e, более того, имеют количество ZP зубьев 13, меньшее чем то, которое предусмотрено стандартным установлением размеров.
Таким образом, можно увеличивать интервал между двумя моментами, в которые пары одинаковых зубьев 13, 11 (или 12) входят в зацепление друг с другом.
Таким образом, риск возможного повреждения пар зубьев 13, 11 (или 12), которые должны зацепляться друг с другом, усиливается, а возможное формирование риска повреждения всего планетарного механизма 6 минимизируется.
Наконец, планетарный механизм 6 имеет количество планетарных шестерен 9a, 9b, 9c, 9d, 9e, большее чем три и, следовательно, крутящие моменты, действующие на планетарные шестерни 9a, 9b, 9c, 9d, 9e, не являются одинаковыми друг с другом по какому бы то ни было условию нагрузки и режима работы планетарного механизма 6.
Для того, чтобы сделать крутящие моменты, действующие на планетарные шестерни 9a, 9b, 9c, 9d, 9e, как можно менее неуравновешенными, фазовые углы β1, β4 являются одинаковыми друг с другом, и фазовые углы β2, β3, β5 являются одинаковыми друг с другом.
В заключение, ясно, что модификации и варианты могут быть произведены в отношении планетарного механизма 6 и в отношении способа, описанных в материалах настоящей заявки, в связи с этим, не выходя из объема защиты настоящего изобретения.
В частности, планетарный механизм 6 мог бы использоваться в конвертоплане.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ФУНКЦИЕЙ «ЗАВИСАНИЯ» | 2019 |
|
RU2783550C1 |
| УСТРОЙСТВО ПЕРЕКЛЮЧЕНИЯ ПЕРЕДАЧ ДЛЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИИ | 2012 |
|
RU2555374C1 |
| ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2693443C1 |
| НАЖИМНОЕ УСТРОЙСТВО ПЕРЕКЛЮЧЕНИЯ СКОРОСТЕЙ ВЕЛОСИПЕДА | 2011 |
|
RU2463195C1 |
| Ювелирное изделие, содержащее механизм для приведения в действие объекта | 2020 |
|
RU2812953C2 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ | 2007 |
|
RU2386067C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ КОРОБКИ ПЕРЕДАЧ | 2002 |
|
RU2264570C2 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА, ВЫПОЛНЕННОГО С ВОЗМОЖНОСТЬЮ ВИСЕНИЯ | 2012 |
|
RU2606423C2 |
| ТРЕХСТУПЕНЧАТАЯ ПЛАНЕТАРНАЯ КОРОБКА СКОРОСТЕЙ | 1973 |
|
SU363829A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ВАРИАТОР | 2010 |
|
RU2457379C1 |

Изобретение относится к планетарному механизму и способу производства такого планетарного механизма. Планетарный механизм (6) для летательного аппарата (1), способного к полету в неподвижной точке, содержит солнечную шестерню (7), которая поворачивается вокруг первой оси (A) и содержит множество первых зубьев (11); неподвижное коронное зубчатое колесо (8), содержащее множество вторых зубьев (12); и по меньшей мере две планетарные шестерни (9a, 9b, 9c, 9d, 9e), каждая из которых содержит множество третьих зубьев (13). Каждая планетарная шестерня (9a, 9b, 9c, 9d, 9e) зацепляется с коронным зубчатым колесом (8) и солнечной шестерней (7) и поворачивается вокруг соответствующих вторых осей (B), которые, в свою очередь, способны оборачиваться вокруг первой оси (A). По меньшей мере два из третьих зубьев (13) зацепляются одновременно с соответствующими вторыми зубьями (12) и дополнительные два из третьих зубьев (13) зацепляются одновременно с соответствующими первыми зубьями (11). Третьи зубья (13) содержат первую сторону (16a) и вторую сторону (16b), которые, соответственно, имеют первый угол (α1) профиля и второй угол (α2) профиля, которые отличны друг от друга. Количество (ZP) третьих зубьев (13) каждой планетарной шестерни (9a, 9b, 9c, 9d, 9e) отлично от абсолютного значения полуразности ((ZC-ZS)/2) между количеством (ZS) первых зубьев (11) солнечной шестерни (7) и количеством (ZS) вторых зубьев (12) коронного зубчатого колеса (8). В результате передача движения на вал ротора реализуется простым и бесшумным образом. 3 н. и 12 з.п. ф-лы, 7 ил.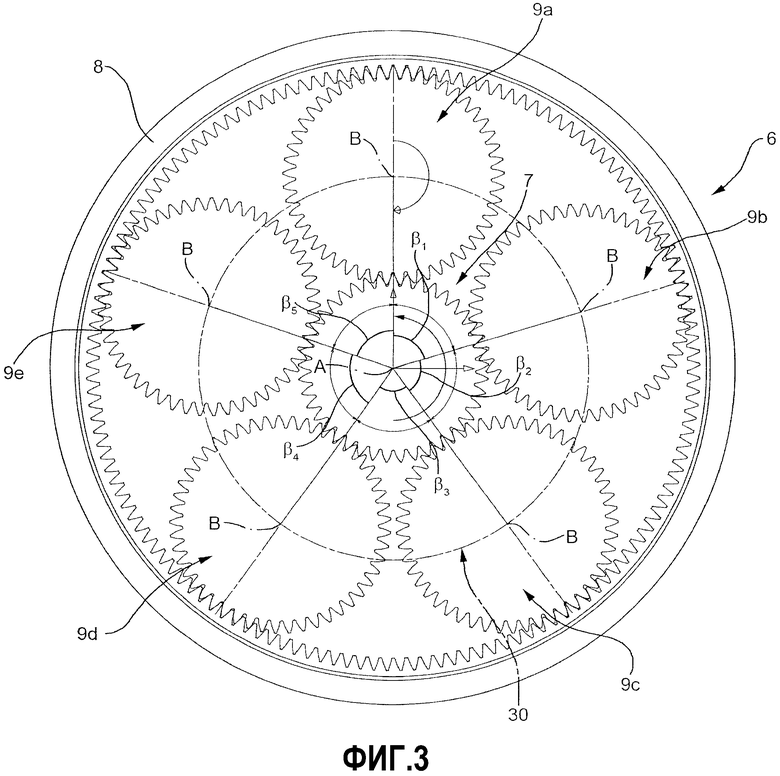
1. Планетарный механизм (6) для летательного аппарата (1), способного к полету в неподвижной точке, содержащий:
солнечную шестерню (7), которая поворачивается вокруг первой оси (A) и содержит множество первых зубьев (11);
неподвижное коронное зубчатое колесо (8), содержащее множество вторых зубьев (12); и,
по меньшей мере две планетарные шестерни (9a, 9b, 9c, 9d, 9e), каждая из которых содержит множество третьих зубьев (13); причем каждая планетарная шестерня (9a, 9b, 9c, 9d, 9e) зацепляется с коронным зубчатым колесом (8) и солнечной шестерней (7) и поворачивается вокруг соответствующих вторых осей (B), которые, в свою очередь, поворачиваются вокруг первой оси (A), отличающийся тем, что:
по меньшей мере два из третьих зубьев (13) зацепляются одновременно с соответствующими вторыми зубьями (12) и дополнительные два из третьих зубьев (13) зацепляются одновременно с соответствующими первыми зубьями (11);
третьи зубья (13) содержат первую сторону (16a) и вторую сторону (16b), которые, соответственно, имеют первый угол (α1) профиля и второй угол (α2) профиля, которые отличны друг от друга; и
количество (ZP) третьих зубьев (13) каждой из планетарных шестерен (9a, 9b, 9c, 9d, 9e) отличается от абсолютного значения полуразности ((ZC-ZS)/2) между количеством (ZS) первых зубьев (11) солнечной шестерни (7) и количеством (ZC) вторых зубьев (12) коронного зубчатого колеса (8).
2. Планетарный механизм по п.1, отличающийся тем, что третьи зубья (13) зацепляются с соответствующими первыми зубьями (11) на первой стороне (16a) и с соответствующими вторыми зубьями (12) на второй стороне (16b); причем первый угол (α1) профиля является меньшим, чем второй угол (α2) профиля.
3. Планетарный механизм по п.1, отличающийся тем, что количество (ZP) третьих зубьев (13) меньше абсолютного значения полуразности ((ZC-ZS)/2).
4. Планетарный механизм по п.3, отличающийся тем, что абсолютное значение полуразности ((ZC-ZS)/2) больше количества (ZP) третьих зубьев (13) на величину, заключенную между 2 и 4.
5. Планетарный механизм по любому из предыдущих пунктов, отличающийся тем, что угол (γ) зацепления второй стороны (16b) меньше угла (α2) профиля на величину, заключенную между 4 и 8°.
6. Планетарный механизм по любому из пп.1-4, отличающийся тем, что он содержит по меньшей мере три планетарные шестерни (9a, 9b, 9c, 9d, 9e), которые могут поворачиваться вокруг соответствующих вторых осей (B);
при этом каждая пара непосредственно следующих друг за другом планетарных шестерен (9a, 9b; 9b, 9c; 9c, 9d; 9d, 9e) связана с соответствующим фазовым углом (β1, β2, β3, β4, β5), определенным между линиями, соединяющими соответствующие вторые оси (B) и первую ось (A); причем по меньшей мере один первый фазовый угол и один второй фазовый угол (β1, β4; β2, β3, β5) являются отличными друг от друга.
7. Планетарный механизм по любому из пп.1-4, отличающийся тем, что по меньшей мере два из первых фазовых углов (β1, β4) равны друг другу.
8. Планетарный механизм по любому из пп.1-4, отличающийся тем, что по меньшей мере три из вторых фазовых углов (β2, β3, β5) равны друг другу и являются большими, чем первые фазовые углы (β1, β4).
9. Планетарный механизм по любому из пп.1-4, отличающийся тем, что каждый из первых и вторых зубьев (11; 12) имеет соответствующие стороны (14a, 14b; 15a, 15b), которые имеют соответствующие дополнительные углы профиля, отличные друг от друга.
10. Планетарный механизм по любому из пп.1-4, отличающийся тем, что первый коэффициент перекрытия, связанный с зацеплением каждой из планетарных шестерен (9a, 9b, 9c, 9d, 9e) с солнечной шестерней (7), превышает 2,5 и второй коэффициент перекрытия, связанный с зацеплением каждой из планетарных шестерен (9a, 9b, 9c, 9d, 9e) с коронным зубчатым колесом (8), превышает 2,5.
11. Планетарный механизм по любому из пп.1-4, отличающийся тем, что первые и вторые стороны (16a, 16b) имеют соответствующие концевые участки (50), наделенные задним углом по отношению к соответствующим начальным теоретическим эвольвентам;
причем эпюра расстояния между точками каждого концевого участка (50) и соответствующей начальной эвольвенты вдоль оси (C) третьего зуба (13) содержит по меньшей мере один первый сегмент (E) и один второй сегмент (F), наклонные относительно друг друга.
12. Летательный аппарат, способный к полету в неподвижной точке, отличающийся тем, что он содержит:
ротор (4);
элемент двигателя и
трансмиссию (5), установленную между ротором и элементом двигателя и содержащую планетарный механизм (6) по любому из предыдущих пунктов;
при этом планетарный механизм (6) содержит водило (30) планетарной передачи, присоединенное к планетарным шестерням (9a, 9b, 9c, 9d, 9e);
причем одно (7) из солнечной шестерни (7) и водила (30) планетарной передачи принимает, при использовании, крутящий момент с элемента двигателя; а
другое (30) из солнечной шестерни (7) и водила (30) планетарной передачи присоединено к ведущему валу ротора (4).
13. Способ производства планетарного механизма (6) для летательного аппарата (1), способного к полету в неподвижной точке; причем планетарный механизм (6) содержит:
солнечную шестерню (7), которая поворачивается вокруг первой оси (A) и содержит множество первых зубьев (11);
неподвижное коронное зубчатое колесо (8), содержащее множество вторых зубьев (12); и,
по меньшей мере две планетарных шестерни (9a, 9b, 9c, 9d, 9e), каждая из которых содержит множество третьих зубьев (13), причем каждая планетарная шестерня (9) зацепляется с коронным зубчатым колесом (8) и солнечной шестерней (7) и поворачивается вокруг соответствующих вторых осей (B), которые, в свою очередь, поворачиваться вокруг первой оси (A); отличающийся тем, что он содержит этапы, на которых:
устанавливают по меньшей мере два из третьих зубьев (13) так, чтобы они одновременно зацеплялись с соответствующими вторыми зубьями (12), и дополнительные два из третьих зубьев (13) так, чтобы они одновременно зацеплялись с соответствующими первыми зубьями (11);
обеспечивают первую сторону (16a) и вторую сторону (16b) третьих зубьев (13), соответственно, первым углом (α1) профиля и вторым углом (α2) профиля, которые отличны друг от друга; и
обеспечивают количество (ZP) третьих зубьев (13) каждой из планетарных шестерен (9a, 9b, 9c, 9d, 9e), отличное от абсолютного значения полуразности ((ZC-ZS)/2) между количеством (ZS) первых зубьев (11) солнечной шестерни (7) и количеством (ZC) вторых зубьев (12) коронного зубчатого колеса (8).
14. Способ по п.13, отличающийся тем, что этап, на котором обеспечивают количество (ZP) третьих зубьев (13), включает этап, на котором обеспечивают количество (ZP) третьих зубьев (13) каждой из планетарных шестерен (9a, 9b, 9c, 9d, 9e), меньшее, чем абсолютное значение полуразности ((ZC-ZS)/2).
15. Способ по п.13 или 14, отличающийся тем, что:
этап установки включает этап, на котором зацепляют третьи зубья (13) с первыми зубьями (11) на первой стороне (16a) и зацепляют третьи зубья (13) со вторыми зубьями (12) на второй стороне (16b); и
этап, на котором обеспечивают первую сторону (16a) и вторую сторону (16b), включает этап, на котором обеспечивают угол (α1) профиля величиной, меньшей, чем второй угол (α2) профиля.
| Радиометр | 1986 |
|
SU1626205A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| ГИДРОДИНАМИЧЕСКАЯ БЕССТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 1999 |
|
RU2151936C1 |
| Многопоточный двухступенчатый редуктор опорно-трансмиссионного узла ветроэнергетической установки | 1989 |
|
SU1796044A3 |
| US 4836053 A, 06.06.1989. | |||

