Изобретение относится к зажимному устройству для коаксиального зажима инструменте держателя на установленном с возможностью вращения вокруг оси вращения шпинделе балансировочной машины, причем шпиндель имеет на торце коаксиальное приемное отверстие, а инструментодержатель имеет вставляемый аксиально в торец шпинделя соединительный вал, который с помощью разъемного зажимного приспособления может аксиально вставляться в приемное отверстие, при этом внутренние центрирующие поверхности в приемном отверстии, внешние центрирующие поверхности на соединительном валу и, при необходимости, другие прилегающие поверхности взаимодействуют, чтобы удерживать инструментодержатель в коаксиальном положении на шпинделе радиально и аксиально.
Зажимное устройство представленного вида известно из DE 19961451 А1. Оно служит для того, чтобы вращающиеся инструменты, такие как сверла, фрезы или шлифующие инструменты, точно центрированные со своим инструментодержателем, соединять со шпинделем балансировочной машины, чтобы можно было измерять с необходимой точностью имеющиеся дисбалансы. Известное зажимное устройство имеет в качестве центрирующего приспособления центрически охватывающую приводной вал, по существу перпендикулярно его внешней боковой поверхности пружинящую или отклоняемую против силы пружины конструкцию с опорными поверхностями, которая состоит из нескольких, распределенных в окружном направлении и расположенных на удалении друг от друга радиально пружинящих лапок, которые отстоят от базового кольца, удерживаемого на соединенном со шпинделем машины основном корпусе. На аксиальном удалении от пружинящей конструкции с опорными поверхностями предусмотрена другая жесткая конструкция с опорными поверхностями, образованная кольцевыми поверхностями на основном корпусе и соединительном валу.
У имеющей опорные поверхности пружинящей конструкции имеется проблема, заключающаяся в том, что положение опорных поверхностей не является постоянным и, например, может зависеть от трения между опорными поверхностями и их сопряженными поверхностями. Вследствие этого при каждом очередном закреплении вала инструмента центрированное положение бывает несколько другим, из-за чего точность воспроизведения зажима может уменьшиться.
Задача предлагаемого изобретения состоит в создании такого зажимного устройства вышеупомянутого типа, благодаря которому обеспечивается центрирование и зажим инструментодержателей в приемном отверстии шпинделя с не изменившейся точностью и при умеренных силах прижатия.
Указанная задача решается посредством зажимного устройства с приведенными в пунктах 1 и 4 формулы изобретения признаками. Преимущественные усовершенствования зажимного устройства приведены в пунктах 2, 3 и с 5 по 14.
Согласно изобретению у зажимного устройства для коаксиального зажима инструментодержателя на установленном с возможностью вращения вокруг оси вращения шпинделе балансировочной машины шпиндель имеет коаксиальное приемное отверстие, а инструментодержатель имеет аксиально вставляемый в торец шпинделя соединительный вал, который с помощью разъемного зажимного приспособления может аксиально зажиматься в приемном отверстии, причем находящиеся в приемном отверстии внутренние центрирующие поверхности взаимодействуют с внешними центрирующими поверхностями на соединительном валу, чтобы удерживать соединительный вал в центрированном положении радиально и, при необходимости, аксиально на шпинделе. Опирание соединительного вала в приемном отверстии происходит согласно изобретению, по меньшей мере, в одной пересекающей ось вращения первой плоскости захвата только на дискретных опорных положениях, которые в окружном направлении имеют промежутки между друг другом, причем первое и второе из дискретных опорных положений образованы внутренними и внешними центрирующими поверхностями и совместно образуют неподвижную опору в первом радиальном направлении, а третье из дискретных опорных положений образовано радиально перемещаемым первым опорным элементом и образует опору в противоположном первому радиальному направлению втором радиальном направлении.
Зажимное устройство согласно изобретению объединяет обеспечивающим преимущество образом свойства неподвижной опоры соединительного вала со свойствами радиально подвижной. Неподвижные первое и второе дискретные опорные положения обеспечивают точное в повторении позиционирование соединительного вала в приемном отверстии шпинделя. Их внутренние и внешние центрирующие поверхности удерживаются в контакте радиально перемещаемым опорным элементом, причем он в состоянии компенсировать в плоскости захвата обусловленные условиями изготовления различия в диаметрах между внутренним диаметром приемного отверстия и внешним диаметром соединительного вала. Ограничение центрирования дискретными опорными положениями имеет, кроме того, то преимущество, что уменьшается влияние трения на центрированное положение и достаточно меньших сил прижатия для того, чтобы добиться заданного и точно воспроизводимого центрированного положения. Чрезмерная определенность определяющей центрированное положение соединительного вала опоры и обусловленные этим различия в положении при повторном зажиме устраняются.
В противоположность к упомянутому вначале известному зажимному устройству компенсирование разниц в диаметрах происходит согласно изобретению только в одном определенном положением обоих неподвижных дискретных опорных положений радиальном направлении. Следствием этого является то, что могут быть ошибки в отношении точного центрирования соединительной цапфы в приемном отверстии. Такого рода ошибки центрирования могут, однако, компенсироваться при балансировании посредством «перегрузочной» компенсации и поэтому не искажают измерения дисбаланса.
Опирание соединительного вала может происходить во второй плоскости захвата аналогичным образом только в дискретных опорных положениях. Для этого внутренние центрирующие поверхности приемного отверстия и внешние центрирующие поверхности соединительного вала могут образовывать четвертое и пятое неподвижные дискретные опорные положения, причем опорные положения в окружном направлении имеют промежуток между друг другом и совместно обеспечивают опирание в радиальном направлении. С четвертым и пятым опорными положениями во второй плоскости захвата может быть сопряжено шестое опорное положение, которое образовано радиально перемещаемым опорным элементом, образующим опору в противоположном направлению неподвижной опоры радиальном направлении. Благодаря опорным положениям в обеих плоскостях захвата достигается точное заданное расположение инструментодержателя относительно шпинделя, причем точность при изготовлении внутренних и внешних центрирующих поверхностей неподвижных опорных положений определяет точность необходимого коаксиального положения инструментодержателя и шпинделя и после разделения шпинделя и инструментодержателя гарантирует точное в повторении принятие этого положения.
Согласно еще одному предложению изобретения точное в повторении коаксиальное ориентирование соединительного вала в приемном отверстии шпинделя может осуществляться также только пятью дискретными опорными положениями, поскольку они расположены в трех удаленных друг от друга, пересекающих ось вращения плоскостях захвата, причем в первой плоскости захвата образованы первое и второе из дискретных опорных положений внутренних и внешних центрирующих поверхностей и совместно образуют неподвижную опору в первом радиальном направлении, причем во второй плоскости захвата образованы четвертое и пятое дискретные опорные положения внутренних и внешних центрирующих поверхностей и совместно образуют неподвижную опору в первом радиальном направлении, причем в расположенной между первой и второй плоскостями захвата третьей плоскости захвата расположен опорный элемент, который образует третье дискретное опорное положение и служит опорой в противоположном первому радиальному направлению втором радиальном направлении.
Компоновка с пятью опорными положениями является статически определенной. Образующий третье дискретное опорное положение опорный элемент может поэтому быть радиально перемещаемым, а также неподвижным. Первое целесообразно тогда, когда соединительный вал имеет цилиндрическую боковую поверхность или внешние центрирующие поверхности соединительного вала являются участками общей цилиндрической боковой поверхности, так как тогда перемещаемый опорный элемент может использоваться для того, чтобы компенсировать разницы диаметров и быть источником заданной радиальной прижимающей силы. Если соединительный вал имеет коническую боковую поверхность или внешние центрирующие поверхности соединительного вала являются участками общей боковой поверхности в форме усеченного конуса, то образующий третье дискретное опорное положение опорный элемент может быть неподвижным, так как соединительный вал вследствие аксиального перемещения опирается на все неподвижные опорные положения в приемном отверстии. Балансировка дисбалансов по диаметру или конусной форме компенсируется также регулировкой аксиального положения соединительного вала в приемном отверстии.
Если внутренние и внешние центрирующие поверхности являются цилиндрическими и опорный элемент можно перемещать в радиальном направлении, то для инструментодержателя необходима аксиальная опора на шпинделе. Для этого инструментодержатель может иметь радиальную поверхность прилегания, которая может прилегать к торцу шпинделя. Если инструментодержатель радиально опирается в дискретных опорных положениях только в одной плоскости захвата, то согласно изобретению аксиальная опора инструментодержателя должна быть исполнена таким образом, чтобы она обеспечивала параллельное оси вращения шпинделя ориентирование оси вращения инструментодержателя. Это может достигаться за счет, по меньшей мере, трех образующих углы треугольника аксиальных опорных положений между инструментодержателем и шпинделем. Предпочтительно аксиальные опорные положения находятся в перпендикулярной оси вращения плоскости.
Согласно другому предложению изобретения радиально перемещаемый третий или шестой опорный элемент может с возможностью радиальной подвижности быть установлен на шпинделе или инструментодержателе и быть радиально перемещаемым против силы пружины. В качестве альтернативы опорный элемент может быть перемещаемым на шпинделе или инструменте-держателе посредством механических установочных элементов. Перемещаемость навстречу силе пружины имеет преимущество в том, что опорный элемент автоматически занимает правильное положение, причем пружина создает на опорном положении необходимую радиальную прижимающую силу.
Дискретные опорные положения могут изготавливаться по-разному и располагаться предпочтительно в приемном отверстии. Они могут быть также образованы путем комбинирования внутренних и внешних поверхностей, которые пересекаются друг с другом. Так, могут, например, внутренние центрирующие поверхности в приемном отверстии быть образованы самостоятельными, параллельными оси ребрами, которые взаимодействуют с кольцеобразными внешними центрирующими поверхностями соединительной цапфы, так что на пересечениях поверхностей возникают дискретные опорные положения. Внутренние центрирующие поверхности опорных положений могут прилегать к внешним центрирующим поверхностям соединительного вала, однако могут иметь и другую форму, например, иметь меньшую кривизну или быть плоскими или выпукло изогнутыми.
Изобретение далее рассматривается подробнее с использованием примеров осуществления, которые отображены на чертеже. Показывают:
фиг.1 - поперечный разрез шпинделя балансировочной машины с находящимся в нем инструментодержателем;
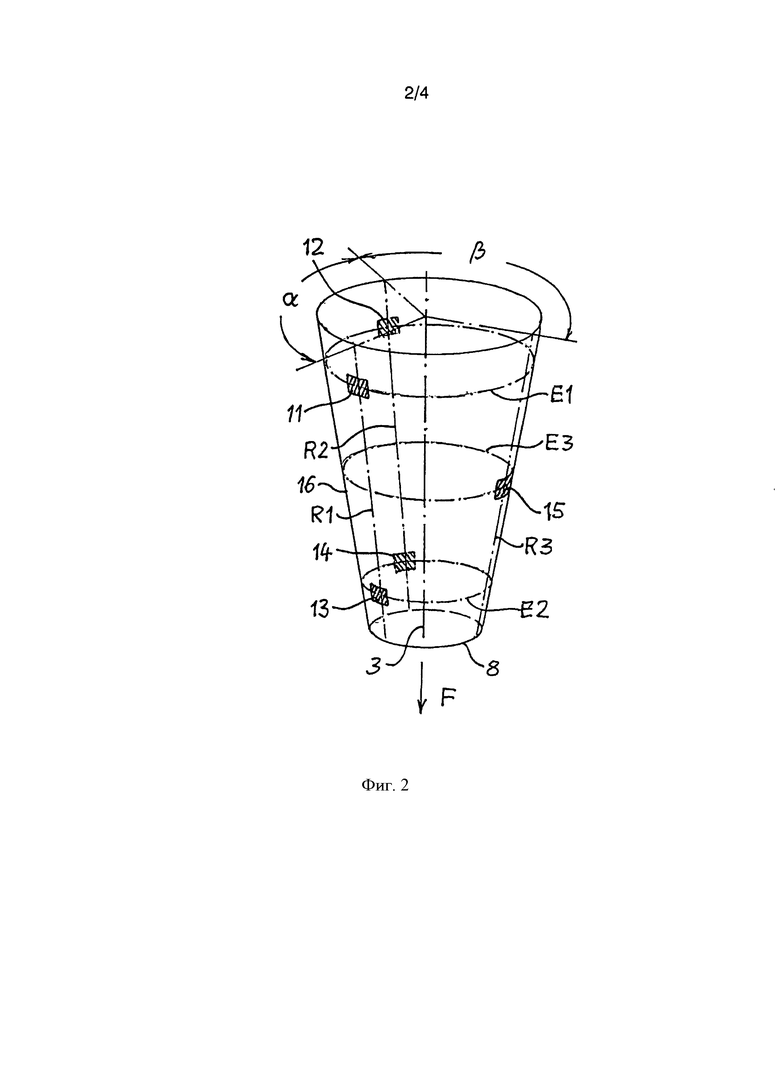
фиг.2 - схематическое изображение дискретной опоры инструментодержателя в шпинделе согласно фиг.1;
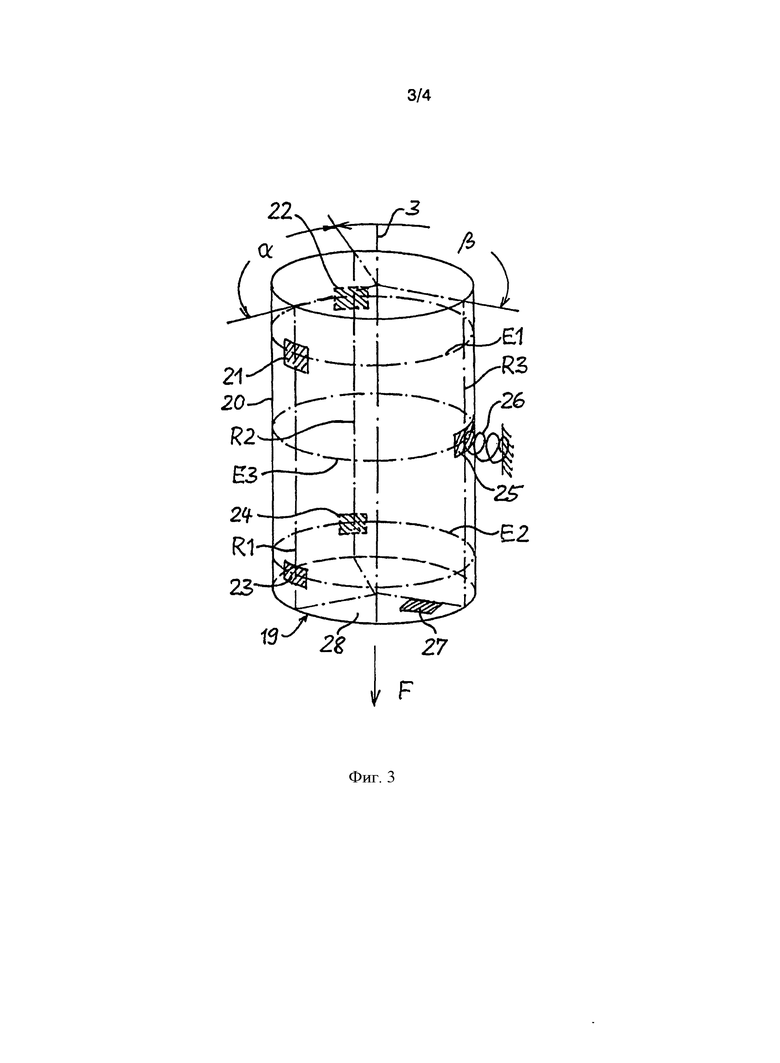
фиг.3 - схематическое изображение дискретной опоры цилиндрического инструментодержателя;
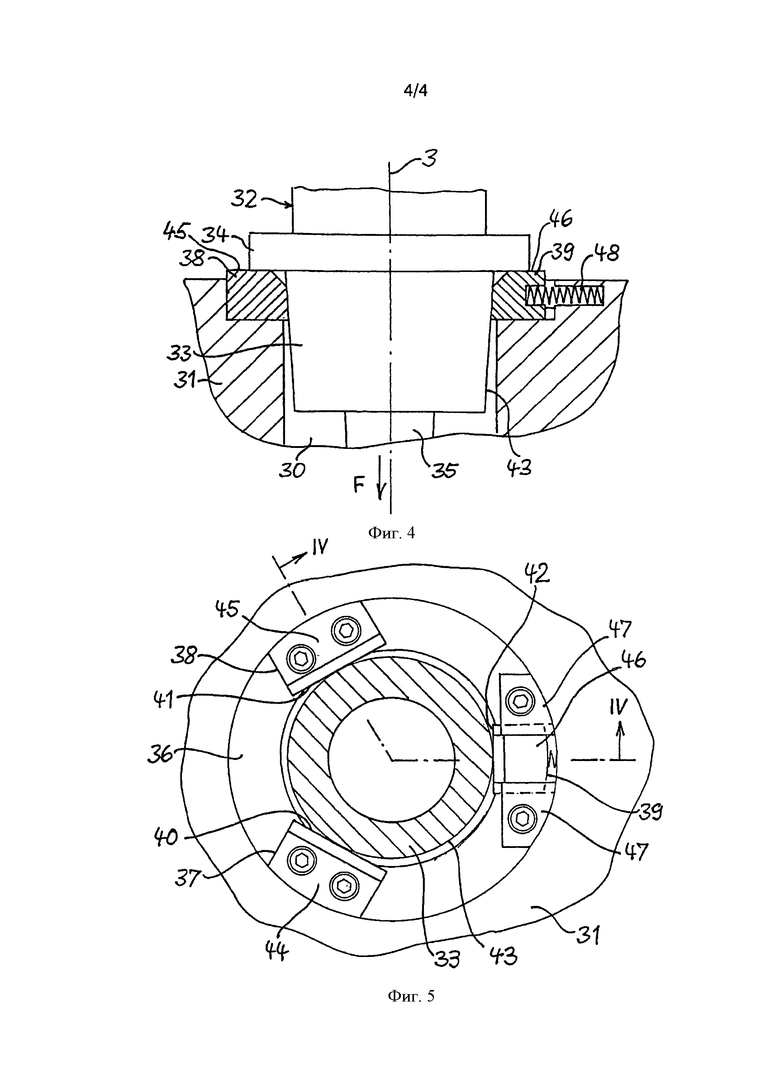
фиг.4 - поперечное сечение IV-IV другой формы осуществления шпинделя балансировочной машины с находящимся в нем инструментодержателем; и
фиг.5 - вид сверху, с частичным разрезом, формы осуществления согласно фиг.4.
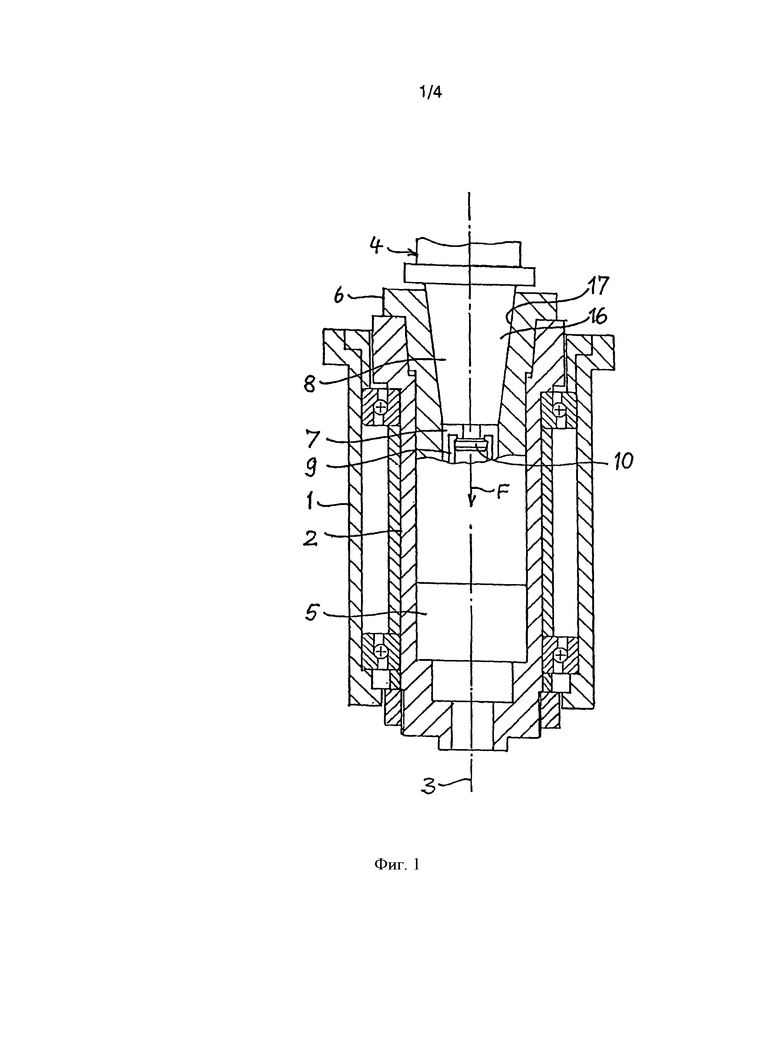
Фиг.1 показывает корпус 1, который предназначен для установки в балансировочную машину. В корпусе 1 с возможностью вращения вокруг оси 3 вращения установлен шпиндель 2. Шпиндель предназначен для динамического измерения дисбаланса инструментодержателя 4 для приводимых в движение на высоких оборотах инструментов, например сверл, фрез или шлифовальных кругов, и в балансировочной машине может приводиться в движение с помощью не изображенного на чертеже вращающего привода. Шпиндель 2 имеет центральное отверстие 5, в котором расположен сменный адаптер 6, который свинчен до отказа со шпинделем 2. Адаптер 6 служит для подгонки приемника шпинделя к определенной форме и размеру соединительного средства подлежащего измерению инструментодержателя 4. В отображенном на чертеже примере осуществления адаптер 6 имеет приемное отверстие 7, которое выполнено для приема расположенного на инструментодержателе 4 соединительного вала 8, который имеет форму обычного крутоконусного вала с имеющей форму усеченного конуса внешней центрирующей поверхностью 16. В адаптере 6, кроме того, расположено приводимое в действие пневматически или гидравлически зажимное устройство 9, которое исполнено для того, чтобы захватывать расположенную на свободном конце соединительного вала 8 зажимную головку 10 и с силой F втягивать соединительный вал 8 в аксиальном направлении в приемное отверстие 7 и удерживать в нем. Адаптер 6 с точной посадкой без зазора вставлен в отверстие 5 шпинделя 2 и его приемное отверстие 7 имеет коаксиальную по отношению к оси 3 вращения внутреннюю поверхность 17 в форме полого конуса, угол конуса которой совпадает с углом конуса соединительного вала 8.
При приеме инструментодержателя с соединительным валом в приводной шпиндель балансировочной машины соединительный вал с очень большой аксиальной силой втягивается в имеющее форму полого конуса приемное отверстие балансировочной машины, чтобы прочный зажим инструментодержателя при обработке деталей не мог ослабеть и сместиться относительно приводного шпинделя. Вследствие большой аксиальной силы незначительно упруго деформируются инструментодержатель и его приемная область приводного шпинделя, где при позиционно точном зажиме разрушающие воздействия, такие как трение и искажения формы в области центрирующих поверхностей, могут преодолеваться. Для определения дисбаланса закрепление инструментодержателя с такой большой аксиальной силой, однако, не требуется и, по соображениям экономии, поэтому также не предусмотрено. Опасность появления ошибок при закреплении и неправильное центрированное положение инструментодержателя относительно шпинделя балансировочной машины поэтому увеличиваются. Чтобы уменьшить эту опасность, согласно изобретению, как показано на фиг.2, в приемном отверстии 7 установлены дискретные опорные положения 11-15, в которых опирается соединительный вал 8 лишь своей внешней центрирующей поверхностью 16 в форме усеченного конуса. Дискретные опорные положения 11-15 состоят из возвышающихся над имеющей форму полого конуса внутренней поверхностью 17 приемного отверстия 7 выступов, поверхности которых образуют внутренние центрирующие поверхности и, соответственно, могут быть участками общей поверхности полого конуса. Выступы являются неподвижными и жестко соединены с адаптером 6. Они могут быть интегрированной составной частью адаптера 6 или состоять из вставок или накладок, которые закреплены в приемном отверстии 7.
Середины опорных положений 11-15 находятся в параллельных плоскостях E1, Е2, Е3 захвата, которые под прямым углом пересекают ось 3 вращения. В отличие от этого плоскости Е1-Е3 захвата могут пересекать ось 3 вращения и под другим углом. В верхней первой плоскости Е1 захвата находятся опорные положения 11, 12, во второй нижней плоскости Е2 захвата находятся опорные положения 13, 14 и в средней третьей плоскости Е3 захвата находится опорное положение 15. Середины опорных положений 11, 13 находятся, кроме того, в первой, по отношению к оси 3 вращения радиальной плоскости R1, а середины опорных положений 13, 14 - во второй радиальной плоскости R2, причем обе радиальные плоскости образуют между собой угол α, который предпочтительно составляет 120°, но также может быть меньше или больше чем 120. Середина опорного положения 15 находится в третьей радиальной плоскости R3, которая делит угол α предпочтительно пополам, но может занимать также отклоняющееся от этого положение. Угол β, который третья радиальная плоскость R3 образует с первой R1 или второй радиальными плоскостями R2, должен, однако, в любом случае быть значительно меньше чем 180°.
За счет описанного расположения дискретных опорных положений 11-15 обеспечивается статически определенная опора для внешней центрирующей поверхности 16 соединительного вала 8. Центрирующее положение соединительной цапфы определяется тем самым исключительно пятью дискретными опорными положениями 11-15, причем достаточно довольно небольшой аксиальной силы F, чтобы в заданной степени прижать соединительный вал 8 к внутренним центрирующим поверхностям 11-15.
Фиг.3 отображает опору для соединительного вала 19 сопоставимой с соединительным валом 8 длины, причем соединительный вал 19 имеет цилиндрическую внешнюю центрирующую поверхность 20. И в данном случае в аналогичной конструкции, как в примере осуществления согласно фиг.2, образованные в приемном отверстии внутренними центрирующими поверхностями пять опорных положений 21-25 находятся в трех параллельных плоскостях E1, Е2, Е3 зажима и радиальных плоскостях R1, R2, R3. Радиальное удаление опорных положений 21-24 от оси 3 вращения одинаково. Поскольку цилиндрическая внешняя центрирующая поверхность 20 аксиально действующей силой F не может прижиматься радиально, опорное положение 25 образуется радиально перемещаемым опорным элементом, который силой пружины 26 может подаваться внутрь. В качестве альтернативы опорное положение 25 может образовать также радиально перемещаемый механическим приспособлением, например, регулировочным винтом, нажимной элемент. Радиально перемещаемым посредством опорного элемента соединительный вал 19 своей внешней цилиндрической поверхностью 20 прижимается в радиальном направлении к расположенным в приемном отверстии неподвижным опорным положением 21-24 и вследствие этого с точным повторением радиально зажимается в коаксиальном по отношению к оси 3 вращения положении. Коаксиальное положение соединительного вала поэтому определяется исключительно неподвижными опорными положениями 21-24 и может, тем самым, приниматься с точным повторением при каждой смене соединительного вала. Радиальная зажимная сила может при этом за счет подбора пружины 26 принимать предпочтительную для соответствующего случая применения величину. В аксиальном направлении опорные положения 21-25 для соединительного вала 19 на внешней центрирующей поверхности 20 опорой служить не могут. Для фиксирования аксиального положения и противодействия аксиальной силе F зажимного устройства необходимо поэтому аксиально действующее опорное положение 27, которое взаимодействует с радиально простирающейся прилегающей поверхностью 28 соединительного вала 19.
Вместо единственного перемещаемого опорного положения 25 в примере осуществления согласно фиг.3 могут располагаться также два образованных одним радиально перемещаемым опорным элементом опорных положения, например одно в плоскости Е1 захвата и другое в плоскости Е2 захвата. Таким путем может достигаться лучшее распределение радиальной зажимной силы на отдельные дискретные опорные положения.
В отображенном на фиг.4 и 5 примере осуществления в приемном отверстии 30 шпинделя 31 зажат инструментодержатель 32, который имеет исполненный в виде пустотелого конусного вала соединительный вал 33 меньшей аксиальной длины. Инструментодержатель 32 имеет на границе с соединительным валом 33 кольцевой фланец 34, который служит для аксиальной опоры и параллельного оси ориентирования инструментодержателя 32 по отношению к оси 3 вращения шпинделя 31. Инструментодержатель 32 зажимается обычным способом с помощью расположенного на шпинделе 31 зажимного устройства 35, которое входит с зацеплением во врезанное отверстие в соединительном валу 33 и притягивает инструментодержатель 32 с кольцевым фланцем 34 в аксиальном направлении к торцевой прилегающей поверхности на шпинделе 31.
Для центрирования и аксиальной опоры инструментодержателя 32 на шпинделе 31 в кольцеобразном расширении 36 торца приемного отверстия 30 расположены два неподвижных опорных элемента 37, 38 и радиально перемещаемый опорный элемент 39.
Середины опорных элементов 37-39 в окружном направлении расположены друг от друга соответственно с одинаковыми промежутками. Опорные элементы 37-39 имеют первые, тангенциально направленные, плоские внутренние центрирующие поверхности 40, 41, 42, которые взаимодействуют с конической внешней центрирующей поверхностью 43 соединительного вала 33 и имеют относительно оси вращения 3 такой же, как и она, наклон. Опорные элементы 37-39 простираются радиально внутрь в приемное отверстие 30, так что внутренний диаметр в области внутренних центрирующих поверхностей 40-42 меньше, чем внутренний диаметр приемного отверстия 30. Своими верхними сторонами опорные элементы 37-39 образуют радиальные прилегающие поверхности 44, 45, 46, которые находятся в общей, перпендикулярной к оси 3 вращения плоскости и служат в качестве аксиальной опоры для кольцевого фланца 34. Опорный элемент 39 перемещается в радиальном направлении в направляющей 47 и упирается в нажимную пружину 48, которая стремится отжать опорный элемент 39 радиально внутрь.
Посредством описанной компоновки опорные элементы 37-39 своими тангенциальными внутренними центрирующими поверхностями 40-42 во взаимодействии с внешней центрирующей поверхностью 43 соединительного вала 33 образуют три дискретных опорных положения, два из которых являются неподвижными и одно радиально против действия пружинной силы перемещаемым. Кроме того, опорные элементы 37-39 своими прилегающими поверхностями 44, 45, 46 образуют три в аксиальном направлении неподвижных дискретных опорных положения для кольцевого фланца 34. Посредством этих дискретных опорных положений достигается точное в повторении центрирование и коаксиальное ориентирование инструментодержателя 32 при относительно небольшом аксиальном зажимном усилии зажимного устройства 35. Нажимная пружина 47 всегда обеспечивает плотное прилегание соединительного вала 33 к внутренним центрирующим поверхностям 40, 41, так что посредством последних устанавливается заданное радиальное положение соединительного вала 33 при каждом повторном зажиме. Небольшие ошибки центрирования, которые могут быть обусловлены малыми различиями в диаметрах соединительных валов разных инструментодержателей, могут исправляться при измерении дисбаланса путем «перегрузочной» компенсации.
Зажимное устройство предназначено для коаксиального зажима инструментодержателя во вращающемся вокруг оси (3) вращения шпинделе балансировочной машины. Соединительный вал (8) в приемном отверстии опирается только в дискретных опорных положениях (11-15), которые в радиальном направлении имеют между собой промежутки и находятся в трех удаленных друг от друга, пересекающих ось (3) вращения плоскостях (E1, Е2, Е3) захвата. Четыре неподвижных дискретных опорных положения (11-14) расположены попарно в первой (Е1) и второй (Е2) плоскостях захвата и совместно образуют неподвижную опору в первом радиальном направлении. В находящейся между первой и второй плоскостями захвата зажима третьей плоскости (Е3) зажима образовано пятое дискретное опорное положение (15), которое обеспечивает опору в противоположном первому радиальному направлению втором радиальном направлении. Достигается точное центрирование и зажим инструментодержателя в приемном отверстии шпинделя. 2 н. и 12 з.п. ф-лы, 5 ил. 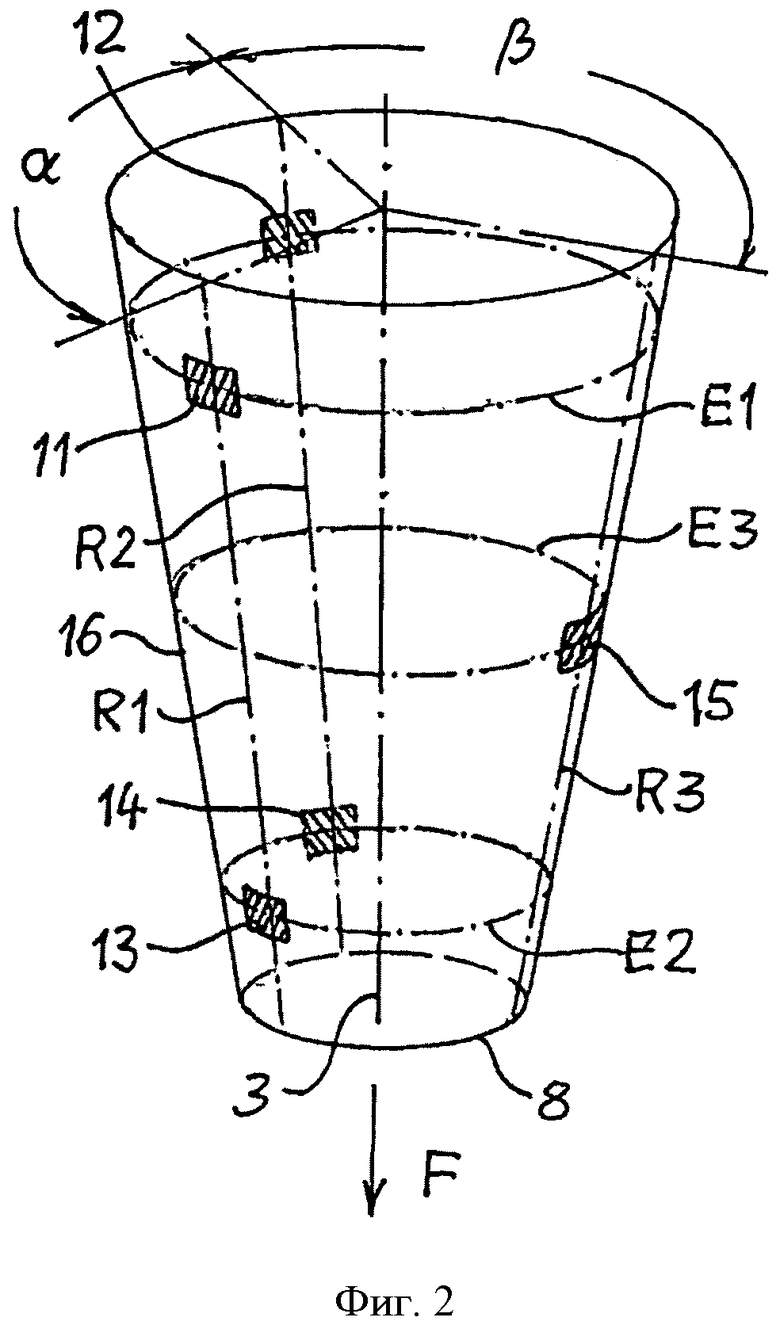
1. Зажимное устройство для жесткого коаксиального зажима с возможностью разъема соединительного вала (33) инструментодержателя (32) на установленном с возможностью вращения вокруг оси (3) вращения шпинделе (31) балансировочной машины, причем шпиндель (31) на торце имеет коаксиальное приемное отверстие (30) для коаксиальной установки упомянутого соединительного вала, причем по меньшей мере одна внутренняя центрирующая поверхность (40-42) в приемном отверстии (30) и дополнительная прилегающая поверхность (44-46) предназначены для взаимодействия с по меньшей мере одной внешней центрирующей поверхностью (43) на соединительном валу (33) для удержания инструментодержателя (32) в коаксиальном положении радиально и аксиально в шпинделе (31), отличающееся тем, что опора соединительного вала (33) в приемном отверстии (30) выполнена только в дискретных опорных положениях, которые в окружном направлении имеют между собой промежутки, причем первое и второе из дискретных опорных положений образованы внутренними центрирующими поверхностями (40, 41), взаимодействующими с внешними центрирующими поверхностями (43) и совместно образующими неподвижную опору в первом радиальном направлении, а третье из дискретных опорных положений образовано радиально перемещаемым первым опорным элементом (39) и является опорой в противоположном первому радиальному направлению втором радиальном направлении.
2. Зажимное устройство по п.1, отличающееся тем, что дискретные опорные положения находятся, по меньшей мере, в одной пересекающей ось (3) вращения плоскости захвата.
3. Зажимное устройство по п.1, отличающееся тем, что опора для соединительного вала в приемном отверстии выполнена только в виде дискретных опорных положений в первой пересекающей ось вращения плоскости захвата и пересекающей ось вращения второй плоскости захвата, причем внутренние и внешние центрирующие поверхности образуют четыре неподвижных дискретных опорных положения, которые попарно расположены в первой и второй из плоскостей захвата и совместно образуют неподвижную опору в радиальном направлении, при этом в первой и второй плоскостях захвата радиально перемещаемым опорным элементом образовано соответственно третье дискретное опорное положение, которое образует опору в одном из противоположных направлению неподвижной опоры радиальных направлений.
4. Зажимное устройство для жесткого коаксиального зажима с возможностью разъема соединительного вала (8, 19) инструментодержателя (4) во вращающемся вокруг оси (3) вращения шпинделе (2) балансировочной машины, причем шпиндель (2) на торце имеет коаксиальное приемное отверстие (7) для коаксиальной установки упомянутого соединительного вала, причем по меньшей мере одна внутренняя центрирующая поверхность (17) в приемном отверстии (7) предназначена для взаимодействия с по меньшей мере одной внешней центрирующей поверхностью (16; 20) соединительного вала (8, 19) для удерживания его в центрированном положении в шпинделе (2), отличающееся тем, что опора для соединительного вала (8, 19) в приемном отверстии (7) выполнена в виде дискретных опорных положений (11-15, 21-25), которые в окружном направлении имеют между собой промежутки, расположены в трех удаленных друг от друга, пересекающих ось (3) вращения, плоскостях захвата (E1, Е2, Е3) и образованы внутренними центрирующими поверхностями, предназначенными для взаимодействия с внешними центрирующими поверхностями, причем в первой плоскости (Е1) захвата образованы первое (11, 21) и второе (12; 22) из дискретных опорных положений (11-15, 21-25), которые совместно образуют неподвижную опору в первом радиальном направлении, причем во второй плоскости (Е2) захвата образованы третье (13, 23) и четвертое (14, 24) из дискретных опорных положений (11-15, 21-25), которые совместно образуют вторую неподвижную опору в первом радиальном направлении, причем в расположенной между первой и второй плоскостью захвата третьей плоскости (Е3) захвата образовано пятое дискретное опорное положение (15, 25), которое обеспечивает опору в противоположном первому радиальному направлению втором радиальном направлении.
5. Зажимное устройство по п.4, отличающееся тем, что пятое дискретное опорное положение (25) образовано радиально перемещаемым опорным элементом (39).
6. Зажимное устройство по любому из пп.1-3 или 5, отличающееся тем, что радиально перемещаемый опорный элемент (39) радиально подвижно установлен на шпинделе (32) или инструментодержателе и с возможностью перемещения против силы пружины (26; 48).
7. Зажимное устройство по любому из пп.1-5, отличающееся тем, что внешняя центрирующая поверхность (20) соединительного вала (19) образована цилиндрической боковой поверхностью или несколькими цилиндрическими боковыми поверхностями.
8. Зажимное устройство по любому из пп.1-5, отличающееся тем, что соединительный вал (8) имеет коническую внешнюю центрирующую поверхность (16).
9. Зажимное устройство по любому из пп.1-5, отличающееся тем, что внешние центрирующие поверхности соединительного вала являются участками общей боковой поверхности в форме усеченного конуса.
10. Зажимное устройство по п.4, отличающееся тем, что пятое дискретное опорное положение (15) выполнено неподвижным.
11. Зажимное устройство по любому из пп.1-5, отличающееся тем, что шпиндель (31) имеет прилегающую поверхность (28) или несколько дискретных прилегающих поверхностей (44-46) в качестве аксиальной опоры для инструментодержателя (32).
12. Зажимное устройство по любому из пп.1-5, отличающееся тем, что дискретные опорные положения (11, 12 или 13, 14, 21, 22 или 23, 24), расположенные в одной и той же плоскости (Е1 или Е2) захвата, имеют одинаковое радиальное удаление от оси (3) вращения.
13. Зажимное устройство по п.12, отличающееся тем, что дискретные опорные положения (11, 13 или 12, 14) разных плоскостей (E1, Е2) захвата имеют разное по величине радиальное удаление от оси (3) вращения.
14. Зажимное устройство по любому из пп.1-5, 10, отличающееся тем, что внутренние центрирующие поверхности дискретных опорных положений (11-15, 21-25) выполнены вогнуто или выпукло изогнутыми или плоскими.
| DE 19961451 A1, 21.06.2001 | |||
| ЦЕНТРОБЕЖНЫЙ ПАТРОН ДЛЯ ЗАКРЕПЛЕНИЯ ИНСТРУМЕНТА С ЦИЛИНДРИЧЕСКИМ ХВОСТОВИКОМ | 0 |
|
SU202750A1 |
| Способ обработки призабойной зоныСКВАжиНы | 1963 |
|
SU832072A1 |
| Оправка | 1981 |
|
SU986629A1 |

