Изобретение относится к области приборостроения, в частности к измерительной технике, и предназначено для измерения угловой скорости, например, в различных системах управления, навигации, стабилизации и наведения.
Известен датчик угловой скорости Mars-RR (Micromachined Angular Rate Sensor) [Geiger W. et al. A Silicon Rate Gyroscope with Decoupled Driving and Sensing Mechanisms MARS-RR. - Symposium Gyro Technology, Germany. - 1998], содержащий инерционную массу, закрепленную на упругих элементах подвеса относительно анкеров, скрепленных с подложкой. Упругие элементы подвеса позволяют инерционной массе перемещаться вдоль одной оси и вместе с несущей рамой вдоль второй оси. Электростатические датчики силы обеспечивают перемещение чувствительного элемента датчика положения вместе с несущей рамой и роторными элементами датчика силы.
Недостатками являются низкие силовые характеристики электростатических датчиков силы, низкая точность, малый диапазон измерений и аналоговый выходной сигнал прибора, обладающий малой помехозащищенностью.
Известен датчик угловой скорости ADXRS 300 [Geen J. US Patent#5,635,640 Micromachined device with rotationally vibrated masses. - 3 June 1997], содержащий основание и крышку, первую и вторую инерционные массы, закрепленные на упругих элементах подвеса, пластины для формирования контура электростатической обратной связи и реализации режима компенсации. Первая и вторая инерционные массы посредством трех электростатических двигателей гребенчатой структуры приводятся в вибрационное движение параллельно плоскости основания так, чтобы колебания инерционных масс имели противоположные фазы.
При наличии угловой скорости под действием силы Кориолиса одна инерционная масса будет подниматься, а другая - опускаться по отношению к плоскости вибрации. Чувствительные элементы емкостного датчика положения формируют выходной сигнал датчика угловой скорости.
Недостатками являются низкие силовые характеристики электростатических датчиков силы, низкая точность, малый диапазон измерений и аналоговый выходной сигнал прибора, обладающий малой помехозащищенностью.
Наиболее близким из известных технических решений является «Микромеханический датчик угловой скорости» [Пат. РФ №2410701, опубл. Бюл. №3, 2011], содержащий основание и крышку, несущую раму, источник постоянного тока, постоянные магниты, первую и вторую инерционные массы с оптическими щелями, закрепленные на упругих элементах подвеса, которые позволяют инерционным массам перемещаться вдоль двух осей, движение каждой инерционной массы фиксируется первыми датчиками положения, состоящими из излучателя и двухсегментного фотоприемника, и вторыми датчиками положения, состоящими из излучателя и фотоприемника, на поверхности каждой инерционной массы нанесены токопроводящие дорожки и токопроводящие шины, на поверхности упругих элементов подвеса нанесены токоподводы.
Недостатком является аналоговый выходной сигнал прибора, обладающий малой помехозащищенностью.
Задачей является создание датчика угловых скоростей, позволяющего осуществить измерения с расширенным частотным диапазоном и большей точностью, поскольку цифровой выходной сигнал дает возможность улучшить соотношение сигнал-шум.
Техническим результатом является большая помехозащищенность и измерение угловых скоростей с большей точностью и расширенным частотным диапазоном.
Технический результат достигается тем, что в микромеханический датчик угловой скорости, содержащий основание и крышку, несущую раму, постоянные магниты, первую и вторую инерционные массы, закрепленные на упругих элементах подвеса с возможностью перемещения вдоль двух осей, оптические щели на каждой инерционной массе, первые датчики положения, состоящие из излучателя и двухсегментного фотоприемника, и вторые датчики положения, состоящие из излучателя и фотоприемника, токопроводящие дорожки и токопроводящие шины на поверхности каждой инерционной массы, токоподводы на поверхности упругих элементов подвеса, источник постоянного тока, дополнительно введены первый и второй амплитудные детекторы, первый и второй сумматоры, первый и второй триггеры Шмидта, стабилизированный высокочастотный генератор счетных импульсов, микроконтроллер, входы первого и второго амплитудных детекторов попарно соединены с выходами вторых датчиков положения, первые входы первого и второго сумматоров попарно соединены с выходами первого и второго амплитудных детекторов, вторые входы первого и второго сумматоров попарно соединены с выходами первого и второго триггеров Шмидта, выходы первого и второго сумматоров попарно соединены с токопроводящими дорожками первой и второй инерционных масс, к первому входу первого и второго триггера Шмидта попарно подключены выходы одного сегмента фотоприемников первого и второго датчиков положения, а ко вторым входам попарно подключены выходы вторых сегментов первого и второго датчиков положения, выходы первого и второго триггеров Шмидта попарно подключены к первому и второму входам микроконтроллера, выход стабилизированного высокочастотного генератора счетных импульсов соединен с третьим входом микроконтроллера, первый и второй выходы стабилизированного источника постоянного тока попарно соединены с третьими входами первого и второго триггеров Шмидта, третий выход стабилизированного источника постоянного тока соединен с четвертым входом микроконтроллера, четвертый выход стабилизированного источника постоянного тока соединен со входом стабилизированного высокочастотного генератора счетных импульсов, причем источник постоянного тока выполнен в виде стабилизированного источника постоянного тока.
Технический результат достигается за счет введения новых элементов и новых связей, формирующих знакопеременный сигнал постоянного тока в цепи обратной связи, под действием которого первая и вторая инерционные массы могут совершать автоколебания под действием. При этом наличие входного воздействия приводит к смещению центра колебаний и возникновению временной модуляции сигнала, обеспечивающей измерение угловых скоростей с большей точностью и расширенным частотным диапазоном. Введенные элементы и связи позволяют сформировать широтно-импульсный цифровой выходной сигнал, имеющий большую помехозащищенность.
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественных всем признакам заявленного микромеханического датчика угловой скорости, отсутствуют, следовательно, заявленное изобретение соответствует условию "новизна".
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипов признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата, следовательно, заявленное изобретение соответствует "изобретательскому уровню".
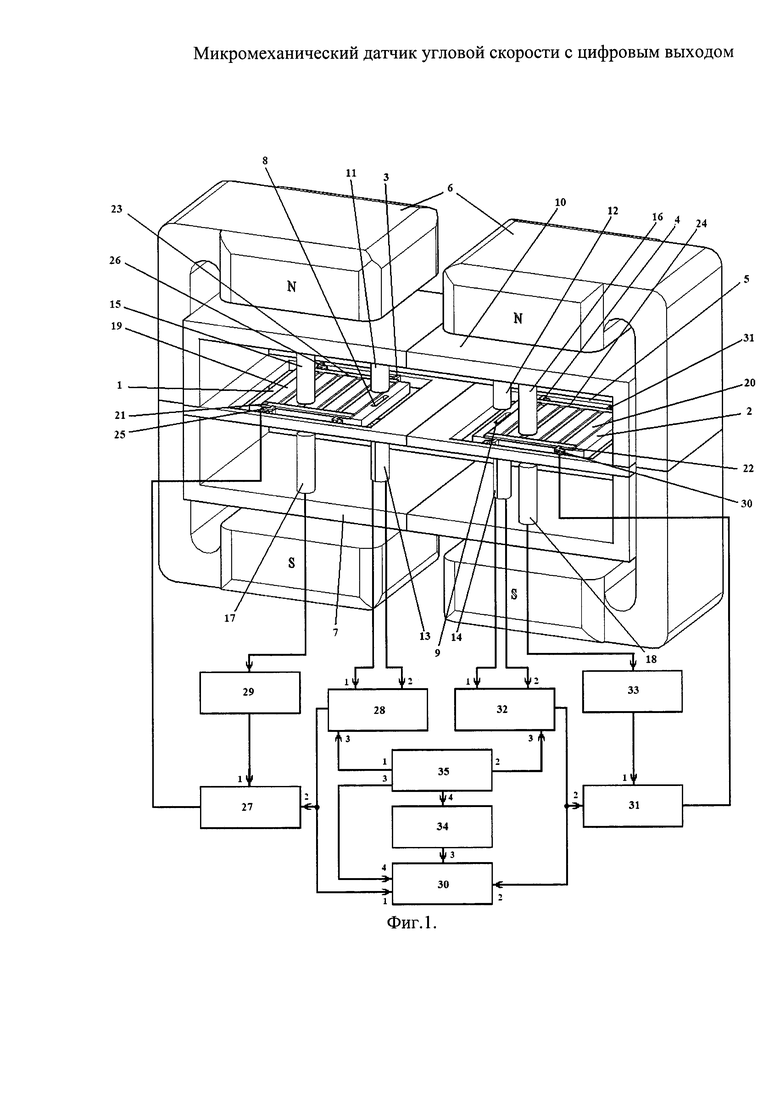
Сущность изобретения поясняется чертежом, где на фиг. 1 представлена электро-кинематическая схема датчика и введены следующие обозначения:
1. Первая инерционная масса.
2. Вторая инерционная масса.
3. Первые упругие элементы подвеса.
4. Вторые упругие элементы подвеса.
5. Несущая рама.
6. Постоянные магниты.
7. Основание.
8. Первая оптическая щель.
9. Вторая оптическая щель.
10. Крышка.
11. Первый излучатель.
12. Второй излучатель.
13. Первый двухсегментный фотоприемник.
14. Второй двухсегментный фотоприемник.
15. Третий излучатель.
16. Четвертый излучатель.
17. Первый фотоприемник.
18. Второй фотоприемник.
19. Первые токопроводящие дорожки.
20. Вторые токопроводящие дорожки.
21. Первая токопроводящая шина.
22. Вторая токопроводящая шина.
23. Третья токопроводящая шина.
24. Четвертая токопроводящая шина.
25. Первый токоподвод.
26. Второй токоподвод.
27. Первый сумматор.
28. Первый триггер Шмидта.
29. Первый амплитудный детектор.
30. Микроконтроллер.
31. Второй сумматор.
32. Второй триггер Шмидта.
33. Второй амплитудный детектор.
34. Стабилизированный высокочастотный генератор счетных импульсов.
35. Стабилизированный источник постоянного тока.
В предлагаемом микромеханическом датчике угловой скорости с цифровым выходом первая и вторая инерционные массы 1, 2 размещены на упругих элементах подвеса 3, 4 в несущей раме 5 в зазоре между двумя постоянными магнитами 6 с возможностью линейного перемещения по двум взаимно перпендикулярным продольной и поперечной осям в плоскости, параллельной основанию 7, и выполнена из монокристаллического кремния в виде пластины с прямоугольными оптическими щелями 8, 9. Магниты 6 закреплены на основании 7 и крышке 10. Первые датчики положения каждой инерционной массы 1, 2 выполнены в виде пар, состоящих из излучателей 11, 12 и двухсегментных фотоприемников 13, 14, оптические оси которых проходят через оптические щели 8, 9, излучатели 11, 12 и двухсегментные фотоприемники 13, 14 закреплены на основании 7 и крышке 10. Вторые датчики положения выполнены в виде пар, состоящих из излучателей 15, 16 и фотоприемников 17, 18, оптические оси которых проходят рядом с краем инерционных масс 1, 2. Излучатели 11, 12, 15, 16 и фотоприемники 13, 14, 17, 18 обоих датчиков положения каждой инерционной массы 1, 2 закреплены в отверстиях на основании 7 и крышке 10, соответственно. На поверхности каждой инерционной массы 1, 2 параллельно поперечной оси напылены токопроводящие дорожки 19, 20, начала которых соединены между собой токопроводящими шинами 21, 22, а концы соединены токопроводящими шинами 23, 24, которые соединены с токоподводами 25, 26 через упругие элементы подвеса 3, 4 первой и второй инерционных масс 1, 2. Токопроводящая шина 23 токоподводом 26 соединена с первым сумматором 27, к первому входу которого подключен выход первого триггера Шмидта 28, а ко второму входу подключен выход первого амплитудного детектора 29, вход которого подключен к выходу фотоприемника 17 первого датчика. К первому входу первого триггера Шмидта 28 подключен выход одного сегмента двухсегментного фотоприемника 13 первого датчика, а ко второму входу подключен выход второго сегмента. Выход первого триггера Шмидта 28 подключен к первому входу микроконтроллера 30. Токопроводящая шина 24 токоподводом 25 соединена со вторым сумматором 31, к первому входу которого подключен выход второго триггера Шмидта 32, а ко второму входу подключен выход второго амплитудного детектора 33, вход которого подключен к выходу фотоприемника 18 второго датчика. К первому входу второго триггера Шмидта 32 подключен выход одного сегмента двухсегментного фотоприемника 14 второго датчика, а ко второму входу подключен выход второго сегмента. Выход второго триггера Шмидта 32 подключен ко второму входу микроконтроллера 31. Третий вход микроконтроллера 31 подключен к выходу стабилизированного высокочастотного генератора счетных импульсов 34. Выходы стабилизированного источника постоянного тока 35 подключены к третьим входам первого и второго триггеров Шмидта 28 и 32, а также ко входу стабилизированного высокочастотного генератора счетных импульсов 34.
Излучатели 11, 12, 15, 16 могут быть выполнены, например, на основе серийно выпускаемых светодиодов КИПД80 В [1].
Фотоприемники 17, 18 могут быть выполнены, например, на основе серийно выпускаемых фотоприемников МГ-32 [2].
Двухсегментные фотоприемники 13, 14 могут быть выполнены, например, на основе серийно выпускаемых оптронов VO0630T [2].
Сумматоры 27, 31 могут быть выполнены, например, на основе серийно выпускаемых сумматоров К176ИМ1 [1].
Триггеры Шмидта 28, 32 могут быть выполнены, например, на основе серийно выпускаемых триггеров 1564ТЛ2 [1].
Амплитудные детекторы 29, 33 могут быть выполнены, например, на основе серийно выпускаемых детекторов К175ДА1 [3].
Микроконтроллер 30 может быть выполнен, например, на основе серийно выпускаемого микроконтроллера 1882ВЕ53У [4].
Стабилизированный источник постоянного тока 28 может быть представлен любой типовой схемой, удовлетворяющей заданным параметрам питания токопроводящих дорожек 19, 20 [5].
Микромеханический датчик угловой скорости с цифровым выходом работает следующим образом.
Микромеханический датчик угловой скорости с цифровым выходом устанавливают на объект для измерения угловой скорости с учетом того, что ось чувствительности ортогональна плоскости основания 7 и проходит через его центр. В исходном состоянии первый излучатель 11 через первую оптическую щель 8 открыт для первого сегмента первого двухсегментного фотоприемника 13, а для второго его сегмента закрыт.В результате на выходе первого сегмента этого двухсегментного фотоприемника появляется сигнал, который направляется на первый вход первого триггера Шмидта 28, который подключает источник постоянного тока 35 к первым токопроводящим дорожкам 19 через первую и третью токопроводящие шины 21, 23, первый и второй токоподводы 25, 26. В результате создания магнитного поля k токопроводящими дорожками 19, имеющими длину l, при подаче на них электрического тока  и взаимодействия этого магнитного поля с магнитным полем постоянных магнитов 6, имеющим индукцию
и взаимодействия этого магнитного поля с магнитным полем постоянных магнитов 6, имеющим индукцию  , возникает сила
, возникает сила  , действующая на инерционную массу 1 по продольной оси и равная
, действующая на инерционную массу 1 по продольной оси и равная

Инерционная масса 1 под действием силы  перемещается по продольной оси, при этом первый излучатель 11 через первую оптическую щель 8 становится открыт для второго сегмента первого двухсегментного фотоприемника 13 и закрыт для первого его сегмента. Вследствие этого с выхода первого сегмента этого двухсегментного фотоприемника сигнал перестает поступать, а на выходе второго его сегмента появляется сигнал. Этот сигнал направляется на второй вход триггера Шмидта 28, что приводит к переключению им направления тока в токопроводящих дорожках 19. Далее процесс переключения повторяется, и инерционная масса 1 совершает автоколебания по продольной оси.
перемещается по продольной оси, при этом первый излучатель 11 через первую оптическую щель 8 становится открыт для второго сегмента первого двухсегментного фотоприемника 13 и закрыт для первого его сегмента. Вследствие этого с выхода первого сегмента этого двухсегментного фотоприемника сигнал перестает поступать, а на выходе второго его сегмента появляется сигнал. Этот сигнал направляется на второй вход триггера Шмидта 28, что приводит к переключению им направления тока в токопроводящих дорожках 19. Далее процесс переключения повторяется, и инерционная масса 1 совершает автоколебания по продольной оси.
В исходном состоянии второй излучатель 12 через вторую оптическую щель 9 открыт для первого сегмента второго двухсегментного фотоприемника 14, а для второго его сегмента закрыт.В результате на выходе первого сегмента этого двухсегментного фотоприемника появляется сигнал, который направляется на первый вход второго триггера Шмидта 32, который подключает источник постоянного тока 35 ко вторым токопроводящим дорожкам 20 через вторую и четвертую токопроводящие шины 22, 24, третий и четвертый токоподводы 30, 31. Инерционная масса 2 перемещается по продольной оси, при этом второй излучатель 12 через вторую оптическую щель 9 становится открыт для второго сегмента второго двухсегментного фотоприемника 14 и закрыт для первого его сегмента. Вследствие этого с выхода первого сегмента этого двухсегментного фотоприемника сигнал перестает поступать, а на выходе второго его сегмента появляется сигнал. Этот сигнал направляется на второй вход второго триггера Шмидта 32, что приводит к переключению им направления тока в токопроводящих дорожках 19. Далее процесс переключения повторяется, и инерционная масса 2 совершает автоколебания по продольной оси в противофазе с первой инерционной массой 1.
При воздействии на микромеханический датчик угловой скорости он работает следующим образом. При наличии угловой скорости  по оси чувствительности датчика на первую инерционную массу 1, движущуюся по продольной оси со скоростью
по оси чувствительности датчика на первую инерционную массу 1, движущуюся по продольной оси со скоростью  и имеющую массу m, по поперечной оси действует сила
и имеющую массу m, по поперечной оси действует сила  , равная
, равная

Вследствие действия силы  первая инерционная масса 1 совершает автоколебания по поперечной оси, при этом световой поток третьего излучателя 15, поступающий на первый фотоприемник 17, модулируется краем первой инерционной массы 1. Выходной сигнал первого фотоприемника 17 поступает на первый амплитудный детектор 29, выходной сигнал которого поступает на первый сумматор 27, что приводит к изменению тока в токопроводящих дорожках 19, а следовательно, к смещению центра автоколебаний первой инерционной массы 1. Временная модуляция сигнала на выходе первого триггера Шмидта 28 несет информацию об угловой скорости вращения микромеханического датчика угловой скорости , этот сигнал поступает для обработки в микропроцессор 30.
первая инерционная масса 1 совершает автоколебания по поперечной оси, при этом световой поток третьего излучателя 15, поступающий на первый фотоприемник 17, модулируется краем первой инерционной массы 1. Выходной сигнал первого фотоприемника 17 поступает на первый амплитудный детектор 29, выходной сигнал которого поступает на первый сумматор 27, что приводит к изменению тока в токопроводящих дорожках 19, а следовательно, к смещению центра автоколебаний первой инерционной массы 1. Временная модуляция сигнала на выходе первого триггера Шмидта 28 несет информацию об угловой скорости вращения микромеханического датчика угловой скорости , этот сигнал поступает для обработки в микропроцессор 30.
При наличии угловой скорости по оси чувствительности датчика вторая инерционная масса 2 совершает автоколебания по поперечной оси в противофазе с первой инерционной массой 1, при этом световой поток четвертого излучателя 16, поступающий на второй фотоприемник 18, модулируется краем второй инерционной массы 2. Выходной сигнал второго фотоприемника 18 поступает на второй амплитудный детектор 33, выходной сигнал которого поступает на второй сумматор 31, что приводит к изменению тока в токопроводящих дорожках 20, а следовательно, к смещению центра автоколебаний второй инерционной массы 2. Временная модуляция сигнала на выходе второго триггера Шмидта 32 несет информацию об угловой скорости вращения микромеханического датчика угловой скорости , этот сигнал поступает для обработки в микропроцессор 30.
На основании вышеизложенного повышение точности измерений достигается за счет введения режима автоколебаний под действием знакопеременного сигнала постоянного тока, формируемого в цепи обратной связи, и уменьшения вследствие этого вредных моментов, действующих на первую и вторую инерционные массы 1 и 2. При этом наличие входного воздействия приводит к смещению центра колебаний и возникновению временной модуляции сигнала, обеспечивающей измерение угловых скоростей с большей точностью и расширенным частотным диапазоном. Формирование широтно-импульсного цифрового выходного сигнала позволяет достичь большей помехозащищенности.
Совокупность существенных признаков изобретения обеспечивает достижение технического результата при осуществлении изобретения в силу того, что содержащиеся в заявленном устройстве основание и крышка, несущая рама, первая и вторая инерционные массы с прямоугольными оптическими щелями и токопроводящими дорожками, упругие элементы подвеса, первый и второй датчики положения каждой инерционной массы, два постоянных магнита, первый и второй ключи, первый и второй компараторы, источник постоянного тока могут быть эффективно использованы для измерения угловой скорости.
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполняются следующие условия:
- средство, воплощающее предлагаемое устройство при его осуществлении, предназначено для использования в измерительной технике, а именно в угловых акселерометрах для измерения углового ускорения, например в инерциальных системах навигации;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности "промышленная применимость".
Источники информации
1. Кашкаров А.П. Популярный справочник радиолюбителя. М: ИП «Радиософт», 2008.
2. Пароль Н.В., Кайдалов С.А. Фоточувствительные приборы и их применение: Справочник. М: Радио и связь, 1991.
3. Атаев Д.И., Болотников В.А. Аналоговые интегральные микросхемы для бытовой радиоаппаратуры: Справочник. М: МЭИ, 1991.
4. Бродин В.Б., Шагурин М.И. Микроконтроллеры: архитектура, программирование, интерфейс: Справочник. М: ЭКОМ, 1999.
5. Справочник по элементам радиоэлектронных устройств. Под ред. В.Н. Дулина, М.С. Жука. М: Энергия, 1977
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2410701C1 |
| УГЛОВОЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2399915C1 |
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР | 2009 |
|
RU2410703C1 |
| ЛИНЕЙНЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2509307C1 |
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР С ОПТИЧЕСКОЙ СИСТЕМОЙ | 2014 |
|
RU2564810C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ УГЛОВОГО АКСЕЛЕРОМЕТРА | 2011 |
|
RU2489722C1 |
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2003 |
|
RU2251114C1 |
| ЛИНЕЙНЫЙ МИКРОАКСЕЛЕРОМЕТР | 2016 |
|
RU2629654C1 |
| ВЫСОКОТОЧНЫЙ КОСМИЧЕСКИЙ АКСЕЛЕРОМЕТР | 2011 |
|
RU2468374C1 |
| КОСМИЧЕСКИЙ ИЗМЕРИТЕЛЬ ПРИРАЩЕНИЯ СКОРОСТИ | 2012 |
|
RU2524687C2 |
Изобретение относится к области приборостроения, в частности к измерительной технике, и предназначено для измерения угловой скорости, например, в системах управления, навигации, стабилизации и наведения. Инерционные массы (1, 2), на поверхности которых напылены токопроводящие дорожки (19, 20), размещены на упругих элементах подвеса (3, 4) в зазоре между двумя постоянными магнитами (6). Датчики положения состоят из пар излучателей (11, 12, 15, 16) и фотоприемников (17, 18) или двухсегментных фотоприемников (13, 14). Инерционные массы (1, 2) совершают автоколебания под действием знакопеременного сигнала, формируемого в цепи обратной связи, состоящей из триггеров Шмидта (28, 32), амплитудных детекторов (29, 33) и сумматоров (27, 31). Наличие входного воздействия приводит к смещению центра колебаний инерционных масс и возникновению временной модуляции выходного сигнала, получаемого после обработки на микроконтроллере (30). Технический результат заключается в большей помехозащищенности и измерении угловых скоростей с большей точностью и расширенным частотным диапазоном. 1 з.п. ф-лы, 1 ил.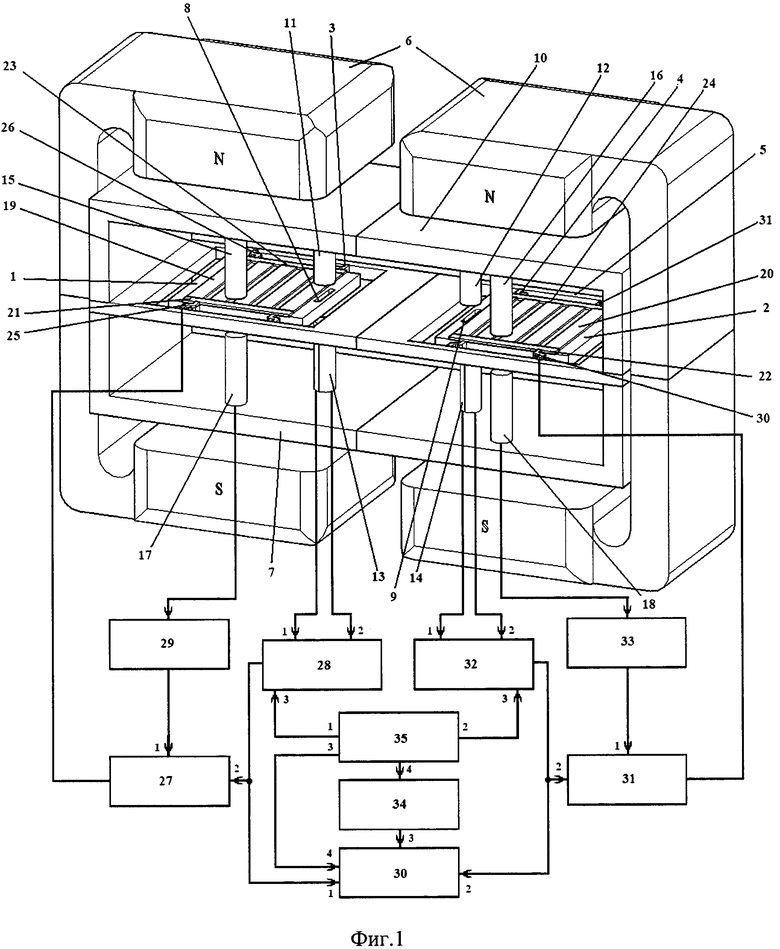
1. Микромеханический датчик угловой скорости с цифровым выходом, содержащий основание и крышку, несущую раму, постоянные магниты, первую и вторую инерционные массы, закрепленные на упругих элементах подвеса с возможностью перемещения вдоль двух осей, оптические щели на каждой инерционной массе, первые датчики положения, состоящие из излучателя и двухсегментного фотоприемника, и вторые датчики положения, состоящие из излучателя и фотоприемника, токопроводящие дорожки и токопроводящие шины на поверхности каждой инерционной массы, токоподводы на поверхности упругих элементов подвеса, источник постоянного тока, отличающийся тем, что дополнительно введены первый и второй амплитудные детекторы, первый и второй сумматоры, первый и второй триггеры Шмидта, стабилизированный высокочастотный генератор счетных импульсов, микроконтроллер, входы первого и второго амплитудных детекторов попарно соединены с выходами вторых датчиков положения, первые входы первого и второго сумматоров попарно соединены с выходами первого и второго амплитудных детекторов, вторые входы первого и второго сумматоров попарно соединены с выходами первого и второго триггеров Шмидта, выходы первого и второго сумматоров попарно соединены с токопроводящими дорожками первой и второй инерционных масс, к первому входу первого и второго триггеров Шмидта попарно подключены выходы одного сегмента фотоприемников первого и второго датчиков положения, а ко вторым входам попарно подключены выходы вторых сегментов первого и второго датчиков положения, выходы первого и второго триггеров Шмидта попарно подключены к первому и второму входам микроконтроллера, выход стабилизированного высокочастотного генератора счетных импульсов соединен с третьим входом микроконтроллера, первый и второй выходы стабилизированного источника постоянного тока попарно соединены с третьими входами первого и второго триггеров Шмидта, третий выход стабилизированного источника постоянного тока соединен с четвертым входом микроконтроллера, четвертый выход стабилизированного источника постоянного тока соединен со входом стабилизированного высокочастотного генератора счетных импульсов.
2. Микромеханический датчик угловой скорости с цифровым выходом по п. 1, отличающийся тем, что источник постоянного тока выполнен в виде стабилизированного источника постоянного тока.
| МИКРОМЕХАНИЧЕСКИЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2410701C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 2006 |
|
RU2306526C1 |
| US 5496436 A, 05.03.1996 | |||
| US 5635640 A, 03.06.1997. | |||

