Изобретение относится к контрольно-измерительной технике, а именно к способам и средствам автоколлимационного измерения и контроля небольших углов с высокой чувствительностью и точностью в машиностроении, геодезии, при поверке высокоточных приборов и в других областях науки и техники.
Известны способы измерения линейных перемещений изображений марки автоколлиматоров, основанные на получении изображения марки осветителя объективом в плоскости чувствительной площадки многоэлементного приемника излучения, например ПЗС (прибор с зарядовой связью), в виде линейки или матрицы и определении перемещений этого изображения путем вычисления координаты его энергетического центра тяжести [Шур В.Л., Лукин А.Я., Шестопалов Ю.А., Попов О.И. Двухкоординатный цифровой автоколлиматор. Измерительная техника. №9, 2005. - с. 45…48].
Основным недостатком этого способа является невысокая чувствительность, особенно при больших расстояниях до объекта, вследствие чего ухудшается и точность измерений.
Наиболее близким по технической сущности и достигаемому результату является способ измерений линейных перемещений марки автоколлиматора, основанный на определении энергетического центра тяжести в сопряжении изображения марки в виде линейчатого растра с аналогичным ему линейчатым растром с удвоенным по ширине центральным темным штрихом [А.С. СССР №485399, G02B 27/30, G02B 27/32 / Фотоэлектрический автоколлиматор. Солдатов В.П. Б.И. №35, 1975].
Основным недостатком этого способа является небольшой диапазон измерений из-за технических сложностей, связанных с определением перемещений изображений, превышающих ширину штрихов растра.
Известны цифровые автоколлиматоры, содержащие узел осветителя с маркой, например в виде штриха, светоделительный блок, объектив и установленный в его фокальной плоскости многоэлементный приемник излучения, например ПЗС, с блоками его функционирования, обработки сигнала и определения углового положения контролируемого элемента по измеренному перемещению изображения марки и эквивалентному фокусному расстоянию объектива [А.С. СССР №485399, G02B 27/30, G02B 27/32 / Фотоэлектрический автоколлиматор. Солдатов В.П. Б.И. №35, 1975; Солдатов В.П. Сравнение двух способов локации цели в приборах с многоэлементными приемниками излучения. Измерительная техника. №12, 2005. - с.31…33].
Недостатком этих автоколлиматоров является невысокая чувствительность.
Наиболее близким по технической сущности и достигаемому результату является фотоэлектрический автоколлиматор с увеличенной чувствительностью, описанный в [Каталог фирмы «Edmund Optics», 2006. - c. 285]. Он содержит последовательно установленные вдоль оптической оси источник излучения с конденсором, марку в виде линейчатого растра с одинаковыми по ширине светлыми и темными штрихами, первый компенсатор в виде поступательно перемещаемой поперек оптической оси телескопической линзы, светоделительную полупрозрачную пластинку, объектив, контрольный элемент, например зеркало, второй компенсатор, аналогичный первому, с возможностью его перемещения поперек оптической оси объектива, второй линейчатый растр, аналогичный первому, но имеющий центральный темный штрих удвоенной ширины, установленный в фокальной плоскости объектива, светоделительный блок, например прямоугольную призму с острым ребром, установленную за линейчатым растром рядом с ним, два приемника излучения, установленные на пути раздвоенных призмой потоков излучения и подключенные к блоку сравнения сигналов с них. [Каталог фирмы «Edmund Optics», 2006. - c. 285].
Основными недостатками этого автоколлиматора являются небольшой диапазон измерений и сложность его конструкции.
Целью изобретения является повышение точности за счет увеличения диапазона измерений и упрощение его конструктивной реализации.
Поставленная цель в способе достигается следующим образом.
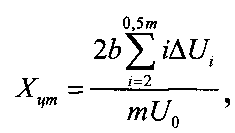
Выбирают ширину боковых штрихов марки осветителя автоколлиматора в виде линейчатого растра равной ширине элементов многоэлементной линейки с произвольной выборкой сигналов с элементов, установленной в фокальной плоскости объектива, а ширину центрального темного штриха растра выбирают равной удвоенной ширине его остальных штрихов, совмещают линии симметрии изображения центрального штриха растра с линией симметрии линейки, измеряют сигналы Ui с выхода засвеченных элементов, запоминают их, фиксируют среди них элемент с номером i=n, на выходе которого сигнал отсутствует (не превышает заранее установленного порогового уровня), вычисляют приближенное перемещение марки, равное nb, где b - период элементов, запоминают его, присваивают новые номера элементам приемника путем вычитания числа n из их первоначальных номеров, вычисляют смещение энергетического центра тяжести Хцm изображения линейчатого растра относительно середины полностью экранируемого элемента исходя из изменений ΔUi измеренных сигналов Ui с выхода только четных элементов линейки, их новых номеров i и числа m засвеченных элементов по формуле

где ΔUi=Ui-0,5U0 - изменение сигналов Ui на выходе i-тых элементов относительно уровня, равного 0,5U0, U0 - сигнал, возникающий при отсутствии экранирования элементов, а величину перемещения X изображения марки определяют по формуле
Х=nb+Хцm/(m+2).
Поставленная цель в устройстве достигается за счет того, что к блоку функционирования многоэлементного приемника излучения, например в виде линейки, и к микропроцессору цифрового блока обработки сигналов с элементов приемника подключен блок управления и синхронизации, обеспечивающий последовательность выполнения отдельных операций, необходимых для определения грубого и точного значений перемещения изображения марки осветителя и их суммирования, а линейчатый растр марки выполнен с шириной его боковых прозрачных и непрозрачных штрихов, равной ширине элементов приемника, причем центральный непрозрачный штрих выполнен с удвоенной шириной относительно ширины элементов.
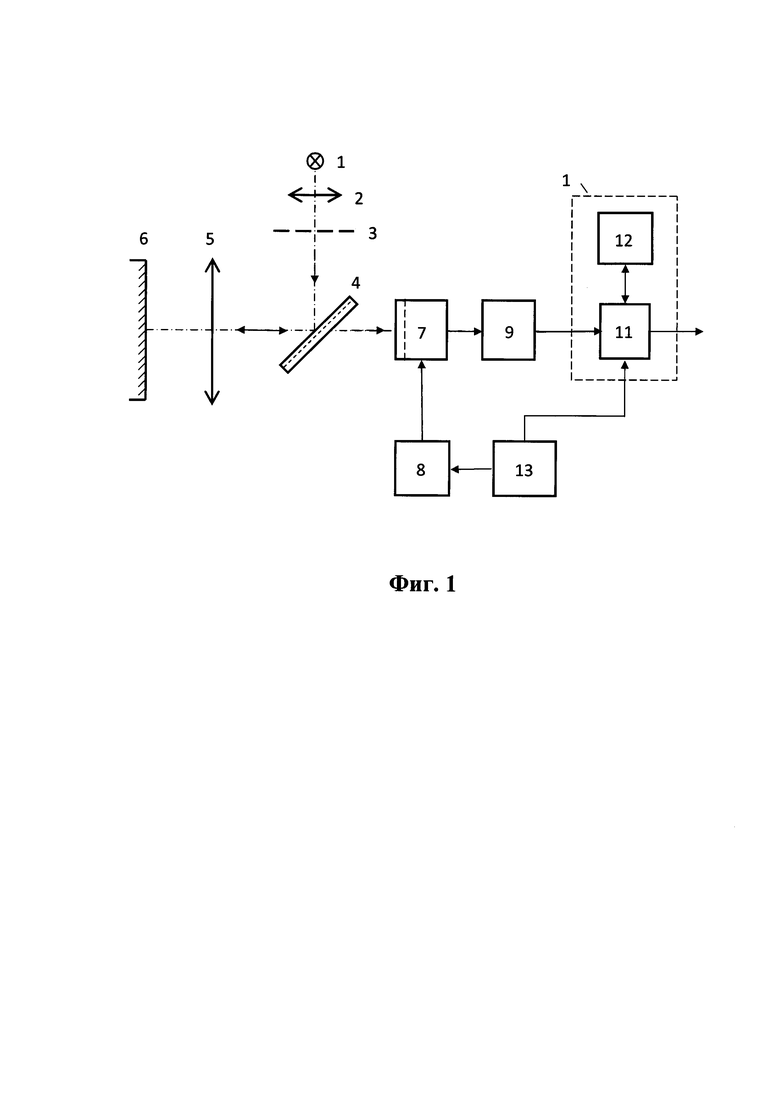
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена блок-схема автоколлимационного устройства, на фиг. 2 и 3 изображены сопряжения изображения растра, условно сдвинутые по вертикали, и плоскости линейки, поясняющие принцип действия предлагаемого способа соответственно при X=0 и при X>0.
Устройство, реализующее способ, содержит (фиг. 1) последовательно установленные вдоль оптической оси источник излучения - 1 с конденсором - 2, марку в виде линейчатого растра - 3 с одинаковыми по ширине боковыми светлыми и темными штрихами, центральный темный штрих которого имеет удвоенную ширину, светоделительную полупрозрачную пластинку - 4, объектив - 5, контрольный элемент, например зеркало 6, многоэлементный приемник излучения - 7, например в виде линейки, установленный в фокальной плоскости объектива - 5, с блоком его функционирования - 8, блок - 9 аналоговой обработки сигнала с аналого-цифровым преобразователем, подключенный к приемнику излучения - 7, блок - 10 цифровой обработки сигнала, подключенный к блоку - 9, содержащий микропроцессор - 11 и блок памяти - 12, подключенный к микропроцессору - 11, а также блок синхронизации и управления - 13, выходы которого подключены к блокам - 8 и - 11.
В первоначальном положении темные штрихи в изображении линейчатого растра перекрывают наполовину элементы линейки, расположенные симметрично относительно линии симметрии нулевого элемента (фиг. 2), который полностью экранирован. При этом в случае равномерной освещенности Е0 в изображении растра потоки, облучающие эти элементы, равны Фi=0,5Ф0=0,5E0A0, где Ф0 - полный поток, облучающий элемент при отсутствии его экранирования, А0 - площадь элементов.
Энергетический центр тяжести Хцm изображения любого объекта, полученного в плоскости многоэлементного приемника излучения, характеризующий его смещение относительно его первоначального положения, определяется по формуле (1)

где Ui=ФiSi - сигналы на выходе элементов приемника;
i - порядковый номер облучаемого элемента;
m - число облучаемых элементов, сигналы с которых превышают в заданное число пороговый уровень;
Si - чувствительность элементов.
Поскольку при нулевом значении перемещения X изображения марки в виде линейчатого растра сигналы с каждого из облучаемых элементов равны половине максимального сигнала U0, который имеет место при отсутствии экранирования их темными штрихами, а номера i элементов, расположенных по разные стороны относительно линии симметрии линейки, имеют разные знаки, из формулы (1) следует, что Хцm=0 (фиг. 1).
При смещении X≤±0,5b изображения растра относительно элементов линейки, вызванном, например, поворотом контрольного элемента автоколлиматора, четные элементы, расположенные в правой части линейки, еще более открываются, а четные элементы левой части приемника закрываются на ту же самую величину X. В результате потоки излучения, облучающие каждый правый элемент приемника, увеличиваются на некоторое значение ΔФ, пропорциональное X, а потоки, попадающие на левые элементы, уменьшаются на ту же самую величину ΔФ (фиг. 3). В этом случае при равномерной освещенности Е0 изображения светлых штрихов растра и одинаковой чувствительности S элементов приемника излучения формула (1) при учете сигналов на выходе только его четных элементов относительно центрального элемента принимает следующий вид:

где ΔUi=ΔU независимо от номера элемента. Отсюда, поскольку при равномерной освещенности элементов ΔФ/Ф0=ΔU/U0=2X/b (3), следует, что Хцm=(m+2)Х.
Таким образом, масштаб преобразования предлагаемого способа в (m+2) раза выше, чем масштаб преобразования известных способов, использующих алгоритм центроиды. В соответствии с этим реальное перемещение изображения марки автоколлиматора в пределах Х≤±0,5b при ее равномерной освещенности определяется по полученному значению Хцm по следующей формуле:
Х=Хцm/(m+2).
При смещении изображения линейчатого растра на величину X вправо, большую, чем X=0,5b, изображение двойного темного штриха начинает полностью перекрывать элемент линейки с номером i=1, а центральный элемент с номером i=0 начинает облучаться потоком излучения, который изменяется по мере увеличения X от 0,5b до 1,5b так же, как в диапазоне - 0,5b≤Х≤0,5b. Причем в диапазоне смещений 0,5b≤X≤1,5b центральным элементом, относительно середины которого производится определение Хцm, становится элемент с номером i=1. Если присвоить этому элементу новый номер i=0, то ясно, что величину Хцm можно вычислить по формуле (2) с учетом смещения изображения растра, равного b. В этом случае
Х=b+Хцm/(m+2).
Аналогичным образом можно показать, что величина X при смещении изображения растра, составляющем сумму произвольного числа полных периодов линейки, равную nb, и дополнительного перемещения Δb, составляющего долю ее периода Δb, может быть представлена в виде
X=nb±Δb,
где Δb=Хцm/(m+2).
Устройство работает следующим образом. По команде с блока - 13 включается блок - 8, с помощью которого появившиеся сигналы Ui на выходе элементов многоэлементного приемника излучения - 7 считываются, а в блоке - 9 они усиливаются, квантуются по уровню и попадают в микропроцессор - 11, а через него в блок - 12, где запоминаются. Далее по команде с блока - 13 микропроцессор определяет тот элемент среди засвеченных с номером n, на выходе которого сигнал отсутствует (минимален), вычисляет грубое значение перемещения, равное nb, которое запоминается в блоке - 12. Соседним с этим элементом микропроцессор присваивает соответствующие новые номера путем вычитания числа n из их первоначальных номеров, которые запоминаются блоком - 12. После этого по команде с блока синхронизации и управления - 13 микропроцессор - 11 производит расчет смещения энергетического центра тяжести Хцm изображения линейчатого растра в плоскости приемника относительно середины полностью экранируемого (нулевого) элемента по значениям сигналов Ui с засвеченных только четных элементов. Результирующее смещение X изображения линейчатого растра в плоскости приемника определяется путем суммирования значения nb и вычисленного точного значения Δb, составляющего долю ширины элемента. По суммарному значению X и фокусному расстоянию объектива микропроцессором определяется измеряемый угол.
По сравнению с прототипом в предложенном способе значительно увеличивается диапазон измерений при более простой его конструктивной реализации. Это объясняется тем, что при этом не требуется использовать два сложных привода с оптическими компенсаторами, требующими тщательной взаимной юстировки для устранения неидентичности их коэффициентов преобразования.
Главным достоинством предлагаемого способа по сравнению с аналогами является то, что в предложенном способе измерений значительно увеличивается масштаб преобразования перемещения X изображения линейчатого растра в изменение положения его энергетического центра тяжести Хцm, равный К=m+2, а следовательно, и чувствительность измерений. В известных способах измерений перемещений К=1. Кроме того, приращения сигналов с элементов приемника в предложенном способе суммируются, образуя результирующий сигнал, во много раз превосходящий результирующий сигнал аналогов, у которых он равен сумме двух сигналов с крайних элементов приемника в случае равномерной освещенности изображения марки. Вследствие этого увеличивается отношение сигнал/шум, от которого зависит и погрешность измерений. Особенно заметны падения этого отношения у аналогов при больших дальностях действия и наличии помех и фона.
Устройство, реализующее предлагаемый способ, может быть выполнено на основе стандартных блоков и узлов. В качестве приемника излучения может использоваться качественная линейка на основе ПЗС или КМОП со стандартными блоками управления ее работой и микропроцессором, обеспечивающими произвольную выборку сигналов с элементов и вычисление перемещений изображений марки в соответствии с предложенным алгоритмом. Что касается марки в виде линейчатого растра, то такие высокоточные растры изготавливаются некоторыми фирмами для метрологических целей, например фирмой «Edmund Optics».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
| ФОТОЭЛЕКТРИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ В ДАТЧИКАХ С МНОГОЭЛЕМЕНТНЫМИ ПРИЕМНИКАМИ ИЗЛУЧЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2508524C2 |
| Фотоэлектрический автоколлиматор | 1977 |
|
SU603939A2 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2408840C1 |
| ИЗМЕРИТЕЛЬ УГЛОВ (ВАРИАНТЫ) | 1994 |
|
RU2116618C1 |
| Фотоэлектрический автоколиматор | 1972 |
|
SU485399A1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ УГЛА СКРУЧИВАНИЯ | 2008 |
|
RU2384811C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ ПЛОСКИХ УГЛОВ | 2007 |
|
RU2353960C1 |
| АВТОКОЛЛИМАТОР | 2021 |
|
RU2769305C1 |

Способ измерения перемещений изображения марки в цифровых автоколлиматорах включает в себя формирование изображения марки в виде линейчатого растра в плоскости многоэлементного приёмника излучения. При этом ширину боковых штрихов растра выбирают равной ширине элементов приёмника излучения, а ширину центрального штриха выбирают равной удвоенной ширине остальных штрихов растра. Далее измеряют сигналы с засвеченных элементов, запоминают их и фиксируют элемент, на котором сигнал отсутствует. На основе полученных данных вычисляют приближенное перемещение марки. Определяют положение энергетического центра тяжести изображения линейчатого растра. И с учётом полученного положения энергетического центра тяжести определяют величину перемещения изображения марки. Технический результат заключается в повышении точности за счет увеличения диапазона измерений и упрощении конструкции устройства. 2 н.п. ф-лы, 3 ил.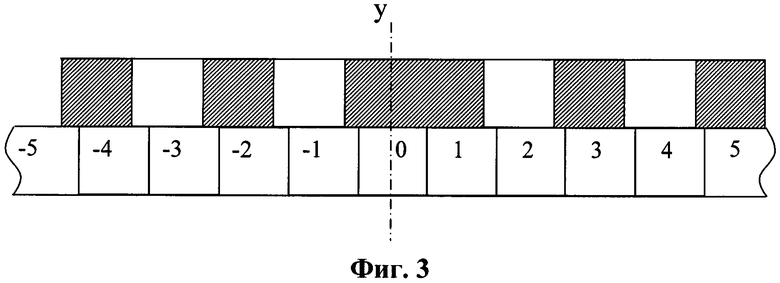
1. Способ для измерения перемещений изображения марки в цифровых автоколлиматорах, заключающийся в том, что равномерное изображение марки формируют в плоскости многоэлементного приемника излучения, например линейки, симметрично линии симметрии ее центрального элемента, отличающийся тем, что ширину боковых штрихов растра выбирают равной ширине элементов приемника излучения, ширину центрального темного штриха выбирают равной удвоенной ширине остальных штрихов растра, измеряют сигналы Ui с выхода засвеченных элементов, запоминают их, фиксируют среди них элемент с номером i=n, на выходе которого сигнал отсутствует (не превышает заранее установленного порогового уровня), вычисляют приближенное перемещение марки по формуле X=nb, запоминают его, присваивают новые номера элементам приемника путем вычитания числа n из их первоначальных номеров, вычисляют смещение энергетического центра тяжести Хцт
изображения линейчатого растра относительно середины полностью экранируемого элемента исходя из изменений измеренных сигналов Ui с выхода только четных новых номеров элементов линейки по формуле:
где m - число засвеченных элементов; ΔUi=Ui-0,5U0 - изменение сигналов Ui на выходе i-тых элементов относительно заранее установленного уровня, равного половине максимального сигнала U0, возникающего при отсутствии экранирования элементов, а величину перемещения X изображения марки определяют по формуле:

2. Устройство для измерения перемещений изображения марки в цифровых автоколлиматорах в цифровых автоколлиматорах, включающее многоэлементный приемник излучения, например, в виде линейки с блоком его функционирования, аналоговый блок обработки сигнала с приемника, подключенный к нему цифровой блок с микропроцессором, отличающееся тем, что ширина боковых штрихов растра выбрана равной ширине элементов приемника, ширина центрального темного штриха равна удвоенной ширине элементов, блок функционирования приемника выполнен с возможностью произвольной выборки сигналов с его элементов, к микропроцессору и блоку функционирования приемника излучения подключен блок управления и синхронизации, а микропроцессор снабжен цифровой схемой вычисления перемещений X изображения марки в виде суммы двух слагаемых, одно из которых равно координате середины полностью экранируемого элемента, а второе равно смещению линии симметрии марки относительно этой середины.
| Автоколлимационный прибор | 1973 |
|
SU523376A1 |
| US 3712739 A1 23.01.1973 | |||
| Многоходовой распределительный кран для натрий-катионитовых фильтров | 1950 |
|
SU97835A1 |
| JP H 05332878 A 17.12.1993. | |||

