Изобретение относится к контрольно-измерительной технике, а именно к способам для дистанционного измерения и контроля перемещений объектов, частей и узлов различных машин, оборудования и сооружений в геодезии, машиностроении, строительстве и астрономии.
Известен способ измерения перемещений объектов, заключающийся в том, что изображение излучающего объекта проецируют с помощью объектива в плоскость многоэлементного приемника излучения и вычисляют координату центра тяжести его изображения по алгоритму центроиды [1]
где xi - координаты центров засвечиваемых элементов многоэлементного приемника излучения; Ui - сигналы с выхода элементов приемника; n - число засвечиваемых элементов.
Недостатками этого способа являются погрешности, обусловленные пространственной дискретизацией сигнала, неравномерным и нестабильным распределением освещенности в изображении объекта, а также погрешности из-за неоднородности чувствительностей и шумов элементов приемника.
Наиболее близкими по технической сущности и достигаемому результату являются фотоэлектрический способ и устройство его реализующее, согласно которым изображение объекта, полученное с помощью объектива в плоскости многоэлементного приемника излучения в виде линейки, перемещают вдоль линейки в обоих направлениях, придают элементам определенные веса, суммируют сигналы с отдельных элементов, фильтруют их и по значению суммарного сигнала судят о смещении объекта [2].
Недостатками этого технического решения являются погрешности измерений вследствие дискретизации сигнала, неоднородности чувствительностей отдельных элементов и их шумов, погрешность, обусловленная неравномерным распределением освещенности изображения объекта или изменением этого распределения при измерениях, а также погрешности из-за нестабильности амплитуды сигнала от объектов и шумов.
Целью изобретения является повышение точности измерений линейных перемещений малоразмерных излучающих объектов путем уменьшения погрешностей из-за пространственной дискретизации сигнала, неравномерности распределения освещенности изображения объекта, неодинаковой чувствительности и шумов отдельных элементов приемника и нестабильности амплитуды полезного сигнала и шумов.
Поставленная цель в способе реализуется за счет того, что по положению изображения малоразмерного объекта, полученного в плоскости многоэлементного приемника излучения, определяют номер N облучаемого элемента приемника, например по максимуму амплитуды сигнала с его выхода, отключают сигналы с выходов остальных элементов, сканируют изображение объекта облучаемым элементом возвратно-поступательно с амплитудой, равной ширине элементов b, формируют опорные импульсы в середине каждого полупериода сканирования, измеряют временные интервалы Δt1 и Δt2 между характерными точками полезных сигналов, образующихся на выходе элемента за каждый полупериод, например их фронтами, и соответствующими опорными импульсами, вычисляют разность этих интервалов Δt=Δt1-Δt2, а искомое линейное перемещение х изображения объекта определяют из соотношения
где N - номер облучаемого элемента, Т - полупериод сканирования.
Поставленная цель в устройстве достигается тем, что в обычный датчик перемещений с многоэлементным приемником излучения в виде линейки с блоками для выполнения им операций произвольной выборки сигналов с элементов введен дополнительный модуль, включаемый после установления положения изображения малоразмерного объекта на определенном элементе приемника, снабженный линейным двигателем, кинематически связанным с оправой приемника излучения, для равномерного сканирования изображения путем линейного возвратно-поступательного перемещения приемника излучения с амплитудой, равной ширине элемента, и электронным блоком обработки сигнала, образующегося при сканировании, состоящим из формирователя остроконечных импульсов подключенного через коммутатор к выходу усилителя элементов, формирователя опорных импульсов в середине каждого полупериода сканирования, подключенного к генератору тактовых импульсов, электронного ключа, входы которого соединены с выходами формирователей опорных и остроконечных импульсов, счетчика импульсов, подключенного к генератору тактовых импульсов и электронному ключу, и блока вычисления разности числа импульсов, возникающих в первую и вторую половину периода сканирования, подключенного к счетчику импульсов и блоку управления, выход которого подключен к микропроцессору.
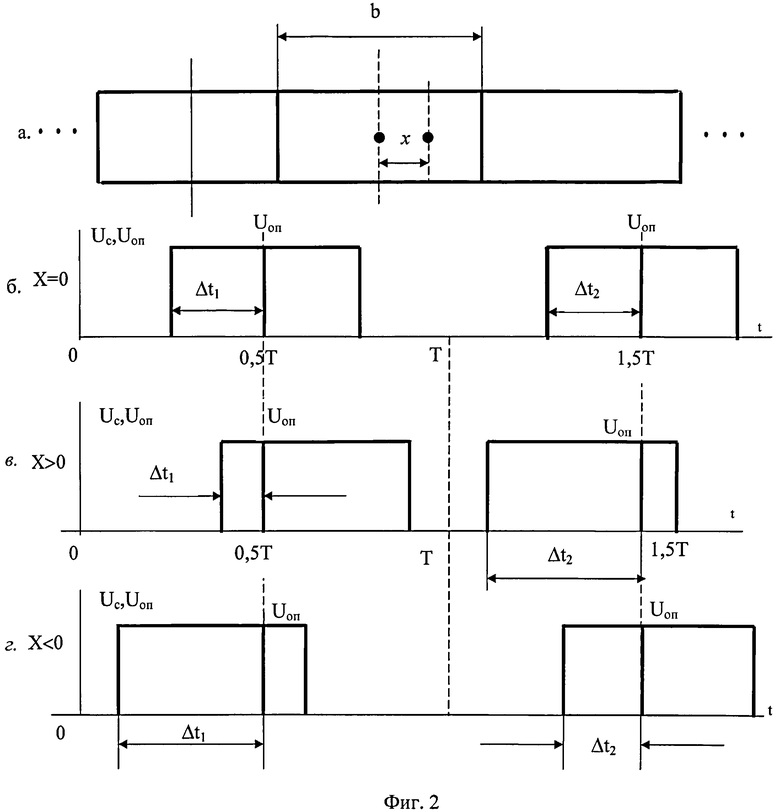
Сущность изобретения поясняется чертежами, где на фиг.1 изображена структурная схема, а на фиг.2(а, б, в, г) приведены фрагмент элементов приемника и диаграммы формирования сигналов в способе при различных перемещениях х изображения малоразмерного объекта.
Устройство, реализующее способ, состоит из малоразмерного источника излучения 1, объектива 2, многоэлементного приемника излучения 3 в виде линейки с произвольной выборкой сигнала, подключенного к блоку управления 4, выходы элементов которого электрически соединены с усилителем 5, коммутатора 6, входы которого подключены к блоку управления 4 и усилителю 5, а выходы - к аналого-цифровому преобразователю (АЦП) 7 и блоку формирования остроконечных импульсов сигнала 8, выход которого электрически соединен с электронным ключом 9, другой вход которого подключен к формирователю опорных импульсов 10, электрически связанному с генератором тактовых импульсов 11, подключенным к счетчику импульсов 12, соединенному через блок 13 вычисления разности числа импульсов с микропроцессором 14, и линейного двигателя 15 с приводом, кинематически связанного с оправой многоэлементного приемника излучения 3. Микропроцессор 14 подключен на вход блока управления 4, который соединен с блоком 13, а генератор тактовых импульсов 11 подключен также к многоэлеметному приемнику излучения 3 и счетчику импульсов 12.
Работа устройства для измерения линейных перемещений малоразмерных объектов реализуется следующим образом (фиг.1).
По программе, заложенной в микропроцессор 14, через блок управления 4 осуществляется последовательный опрос элементов приемника излучения 3 при включенном через коммутатор 6 АЦП 7 и отключенных блоках 8, 9, 10, 12 и 13. При этом микропроцессор 14 регистрирует засвечиваемый элемент N, например, по величине сигнала на его выходе, запоминает его, после чего блок управления 4 по сигналу с микропроцессора 14 через коммутатор 6 прерывает передачу информации через АЦП 7, отключает выходы всех элементов приемника излучения 3, за исключением выхода засвечиваемого элемента, включает линейный двигатель 15, осуществляющий возвратно-поступательное движение с постоянной скоростью (колебания) оправы приемника относительно неподвижного изображения объекта с амплитудой, равной ширине b элементов линейки, и включает канал преобразования сигнала 8, 9, 10, 11, 12 и 13.
При этом блок 8, содержащий, например, амплитудный ограничитель и дифференцирующую цепь, формирует от фронтов сигнала Uc (фиг 2) на выходе N-го элемента остроконечные импульсы (не показаны), временные сдвиги Δt1 и Δt2 которых относительно соответствующих опорных импульсов Uоп, формируемых блоком 10 в середине каждого полупериода сканирования элемента, открывает ключ 9 на соответствующее время Δt1 и Δt2. В результате высокочастотные импульсы от генератора 11 в течение интервалов времени, равных Δt1 и Δt2, попадают на счетчик 12, а блок 13 осуществляет вычитание чисел импульсов, возникших за соответствующие полупериоды сканирования. Их разность ность зависит от значения разности интервалов Δt2 и Δt1 которая изменяется с изменением перемещений изображения х.
Для установления аналитической связи между перемещением х точечного изображения объекта относительно середины элемента приемника (начала координат) с разностью Δt2 и Δt1 обратимся к фиг.2. Если изображение малоразмерного, например точечного излучателя, находится в середине среднего (нулевого) элемента (фиг.2а), то при линейном сканировании этого изображения с амплитудой b относительно этого элемента возникают прямоугольные импульсы с Uc. Для случая, когда х=0 и за начало координат этих импульсов (t=0) принимается левое крайнее положение элемента приемника, временное положение импульсов Uc=f(t) показано на фиг.26. При этом временные интервалы Δt1 и Δt2 между фронтами обоих импульсов Uc, возникающих за полный период сканирования 2Т, и соответствующими опорными импульсами Uon равны друг другу, т.е. Δt1=A t2=0,25Т, где Т - полупериод сканирования. Следовательно, Δt=Δt1-Δt2=0.
Если изображение точечного излучателя смещается на определенную величину х относительно середины нулевого элемента вправо, то первый из импульсов тоже смещается вправо на величину Δt, пропорциональную х, в то время как импульс за второй полупериод сканирования смещается влево на ту же величину Δt (фиг.2в). В результате разность временных интервалов Δt2 и Δt1 станет равной 2Δt. При смещении изображения излучателя на ту же величину х относительно нулевого положения в противоположную сторону знак разности 2Δt меняется на обратный (фиг.2 г). Максимальное смещение изображения относительно середины элемента равно xmax=±0,5b. Ему соответствует временной интервал AUax=0,5Т. Отсюда следует, что при линейной скорости сканирования зависимость перемещений х от значений Δt принимает вид

Основными преимуществами предлагаемого способа по сравнению с аналогами и прототипом являются следующие:
1. Неоднородность чувствительностей и шумов отдельных элементов приемника излучения не влияет на точность измерений перемещений объектов, так как сканирование производится относительно одного и того же элемента при отключенных выходах остальных.
2. Неравномерное и изменяющееся распределение освещенности изображения объекта в плоскости приемника и шумы в сигнале вызывают значительно меньшую погрешность, так как используется импульсный способ обработки информации, при котором изменение амплитуды сигнала и шумы оказывает на точность измерений значительно меньшее влияние, чем при амплитудных способах, используемых в аналоге и прототипе.
3. Повышается пороговая чувствительность измерений, т.е. разрешающая способность Δxmin, т.к. интервал времени Δt измеряется путем счета высокочастотных импульсов, заполняющих этот интервал. Например при используемой часто частоте f=20Мгц период импульса Тимп=5·10-4 с. Отсюда минимальная чувствительность при Т=1с равна
4. Устранена частная погрешность измерений из-за дискретной структуры приемника излучения, которая растет с увеличением размера элементов (частоты Найквиста) и равна 2b, поскольку высокая разрешающая способность легко реализуется при достаточно высоком отношении сигнал/шум.
Способ заключается в том, что изображение объекта фокусируют объективом в плоскости приемника, сканируют его возвратно-поступательно вдоль линейки элементов приемника, предварительно определяют номер N облучаемого элемента приемника, выключают выходы остальных элементов, осуществляют периодическое равномерное возвратно-поступательное сканирование изображения объекта облучаемым элементом с амплитудой, равной ширине элемента b, формируют опорные импульсы в середине каждого полупериода сканирования, измеряют временные интервалы Δt1 и Δt2 между фронтами сигналов и опорными импульсами в каждом полупериоде сканирования и измеряют их разность Δt=Δt2-Δt1. Линейное перемещение х изображения объекта определяют по формуле x=Nb+bΔt/T, где T - полупериод сканирования. Устройство содержит объектив, многоэлементный приемник излучения в виде линейки, электронный модуль обработки сигнала при сканировании изображения объекта в пределах ширины одного элемента приемника и линейный двигатель для обеспечения возвратно-поступательного перемещения оправы приемника в пределах ширины его элемента. Технический результат - повышение точности измерений линейных перемещений. 2 н.п. ф-лы, 2 ил.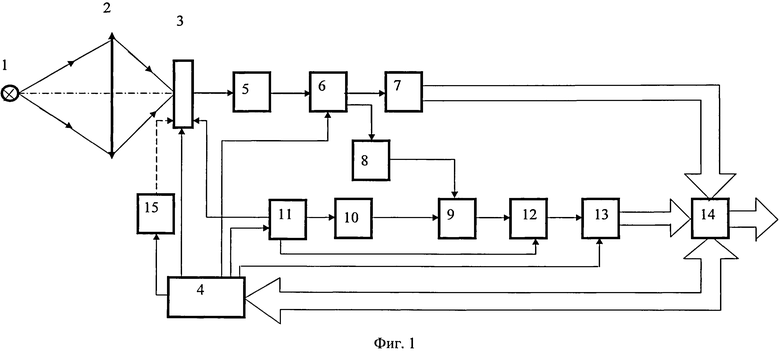
1. Фотоэлектрический способ измерения линейных перемещений малоразмерных объектов в датчиках с многоэлементными приемниками излучения, заключающийся в том, что изображение объекта фокусируют объективом в плоскости приемника, сканируют его возвратно-поступательно вдоль линейки элементов приемника, отличающийся тем, что предварительно определяют номер N облучаемого элемента приемника, например, по наличию максимального сигнала с его выхода, выключают выходы остальных элементов, осуществляют периодическое равномерное возвратно-поступательное сканирование изображения объекта облучаемым элементом с амплитудой, равной ширине элемента b, формируют опорные импульсы в середине каждого полупериода сканирования, измеряют временные интервалы Δt1 и Δt2 между фронтами сигналов и опорными импульсами соответственно в каждом полупериоде сканирования, вычисляют разность этих интервалов Δt=Δt1-Δt2, а линейное перемещение х изображения объекта определяют по формуле
где N - номер засвечиваемого элемента приемника;
b - ширина элемента;
Δt1 и Δt2 - временные интервалы между фронтами сигналов и опорными импульсами в первом и втором полупериоде сканирования соответственно;
Т - полупериод сканирования.
2. Устройство для измерения линейных перемещений малоразмерных объектов в датчиках с многоэлементными приемниками излучения, содержащее объектив, многоэлементный приемник излучения в виде линейки с традиционными блоками его функционирования и выполнения произвольной выборки сигналов с элементов для определения положения изображения объекта, отличающееся тем, что оно снабжено дополнительным электронным модулем обработки сигнала при сканировании изображения объекта в пределах ширины одного элемента приемника, включающим формирователь остроконечных импульсов с фронтов сигнала на выходе элемента, подключенный через коммутатор к выходу усилителя элемента приемника, формирователь опорных импульсов в середине каждого полупериода сканирования, подключенный к генератору тактовых импульсов, электронный ключ, входы которого соединены с выходами формирователя опорных импульсов и формирователя остроконечных импульсов, счетчик импульсов, подключенный к генератору тактовых импульсов и электронному ключу, и блок вычисления разности числа импульсов, возникающих в первую и вторую половину периода сканирования, подключенный к счетчику импульсов и блоку управления, выход которого подключен к микропроцессору; и линейным двигателем, подключенным к блоку управления с возможностью обеспечения возвратно-поступательного перемещения оправы приемника в пределах ширины его элемента.
| Устройство для измерения линейных размеров | 1989 |
|
SU1744444A1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419068C2 |
| CN 102155917 A, 17.08.2011 | |||
| ОПТОЭЛЕКТРОННЫЙ СПОСОБ ИЗМЕРЕНИЯ ШИРИНЫ И СЕРПОВИДНОСТИ ДВИЖУЩЕГОСЯ ЛИСТОВОГО МАТЕРИАЛА | 2004 |
|
RU2278355C2 |
| JP 0063042408 A, 23.02.1988. | |||

