ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству для получения информации о субъекте, а также способу получения информации в отношении субъекта, позволяющим получать информацию о субъекте путем обнаружения фотоакустической волны, формируемой путем излучения света на субъекта.
УРОВЕНЬ ТЕХНИКИ
Исследования, выполняемые на устройстве для оптической визуализации, пропускающем свет через субъекта, при этом свет излучается из светового источника, такого как лазер, на субъекта, и получающем информацию о содержимом субъекта, широко проводятся главным образом в медицине. Фотоакустическая визуализация (PAI) одна из таких технологий оптической визуализации. Фотоакустическая визуализация представляет собой технологию, в которой импульсный свет, формируемый световым источником, излучается на субъекта (живой организм), обнаруживается фотоакустическая волна, формируемая, когда световое излучение, распространившееся через субъекта и рассеявшееся в нем, поглощается в субъекте, после чего обнаруженная акустическая волна подвергается анализу с целью визуализации информации, касающейся оптических характеристик содержимого субъекта. С помощью этой технологии можно получить распределение значений оптических характеристик внутри субъекта, в частности распределение коэффициента поглощения, распределение насыщения кислородом и т.п.
При фотоакустической визуализации начальное звуковое давление P0 фотоакустической волны, формируемой из интересующей области внутри субъекта, можно представить следующим выражением.
Здесь Г - коэффициент Грюнайзена, получаемый путем деления произведения коэффициента β объемного расширения и квадрата скорости c звука на удельную теплоемкость при постоянном давлении CP. Известно, что когда субъект определен, Г имеет по существу постоянное значение. Кроме того, µa - коэффициент поглощения интересующей области, а Ф - значение интегральной интенсивности светового излучения в интересующей области.
В PTL 1 описана технология, при которой с помощью детектора акустических волн определяют изменение по времени звукового давления P фотоакустической волны, распространяющейся через субъекта, и на основании результатов обнаружения рассчитывают распределение начального звукового давления внутри субъекта. Согласно PTL 1, разделив вычисленное начальное звуковое давление на коэффициент Г Грюнайзена, можно получить произведение µa на Ф, т.е. плотность поглощения световой энергии. Кроме того, согласно выражению (1), плотность поглощения световой энергии требуется разделить на интенсивность Ф светового излучения, чтобы определить коэффициент µa поглощения из начального звукового давления P0.
СПИСОК ПАТЕНТНОЙ ЛИТЕРАТУРЫ
PTL 1: патентная публикация Японии №2010-88627
PTL 2: патентная публикация Японии №2006-51355
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Однако в фотоакустической визуализации, описанной в PTL 1, требуется точнее определять значение оптической характеристики.
Таким образом, задача настоящего изобретения заключается в том, чтобы применительно к фотоакустической визуализации создать устройство для получения информации о субъекте и способ получения информации в отношении субъекта, позволяющие получать более точное значение оптической характеристики.
РЕШЕНИЕ ЗАДАЧИ
Ввиду поставленной задачи устройство для получения информации о субъекте согласно настоящему изобретению включает в себя блок обработки сигнала, включающий в себя установочный блок, задающий определенные области чувствительности, соответствующие множеству элементов обнаружения акустических волн, на основании распределения чувствительности множества элементов обнаружения акустических волн, блок получения начального звукового давления, определяющий начальное звуковое давление в интересующей области, не используя сигнал обнаружения, соответствующий интересующей области, полученный элементом обнаружения акустических волн, конкретная область чувствительности которого не включает в себя интересующую область, блок получения интенсивности светового излучения, получающий значение интегральной интенсивности светового излучения в интересующей области на основании сигналов обнаружения, использованных блоком получения начального звукового давления, а также блок получения значения оптической характеристики, который получает значение оптической характеристики в интересующей области, используя начальное звуковое давление, полученное блоком получения начального звукового давления, а также значение интегральной интенсивности светового излучения, полученное блоком получения интенсивности светового излучения.
ПОЛЕЗНЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
Согласно настоящему изобретению могут быть созданы устройство для получения информации о субъекте и способ получения информации в отношении субъекта, способные получать более точное значение оптической характеристики.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На Фиг. 1 показана блок-схема устройства для получения информации о субъекте согласно первому варианту осуществления.
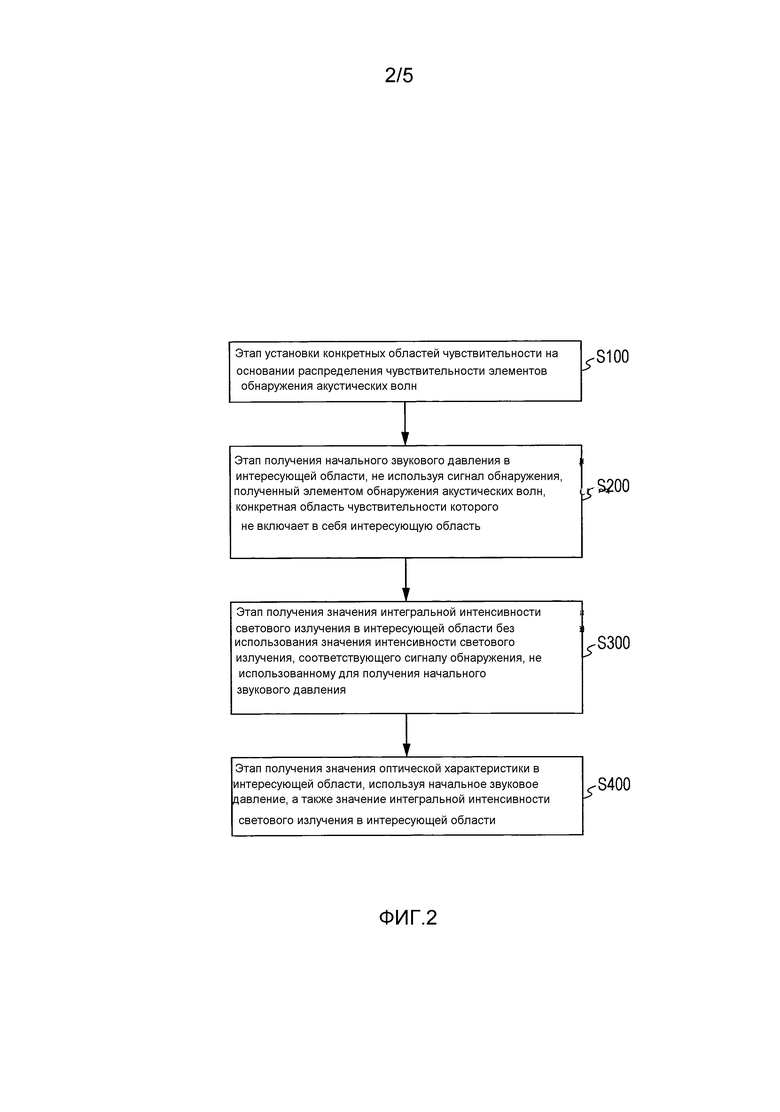
На Фиг. 2 показана блок-схема алгоритма способа получения информации в отношении субъекта согласно первому варианту осуществления.
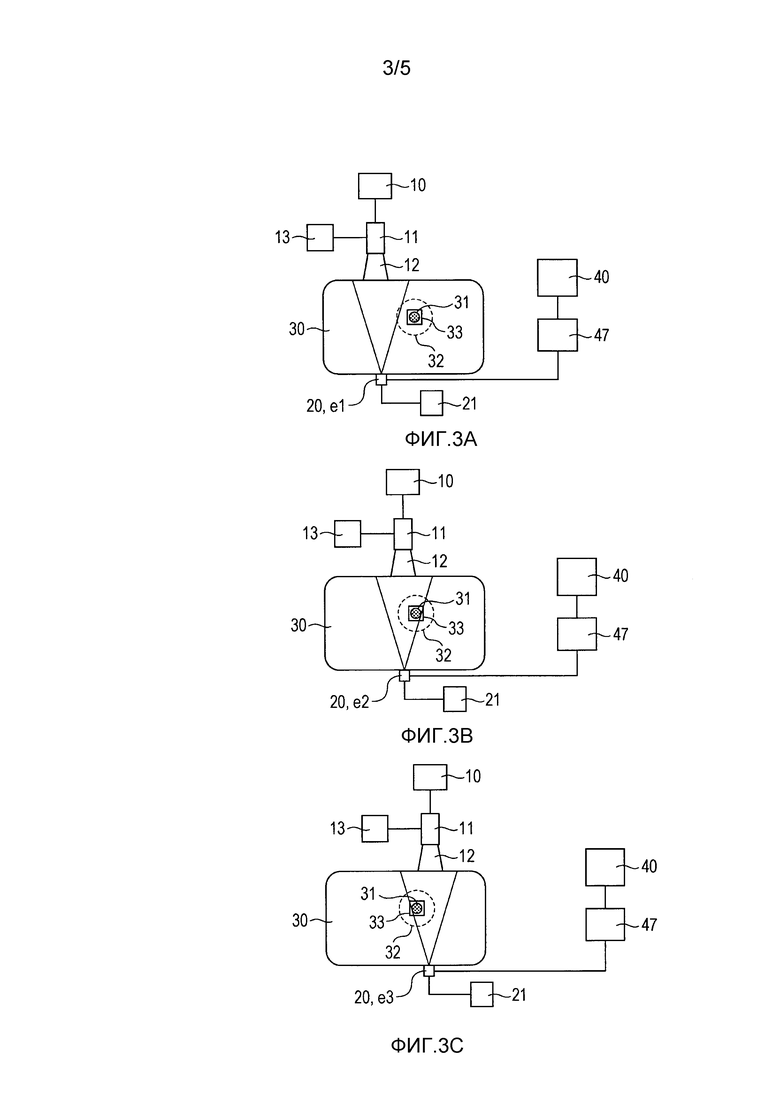
На Фиг. 3A показана блок-схема устройства для получения информации о субъекте согласно второму варианту осуществления.
На Фиг. 3B показана блок-схема устройства для получения информации о субъекте согласно второму варианту осуществления.
На Фиг. 3C показана блок-схема устройства для получения информации о субъекте согласно второму варианту осуществления.
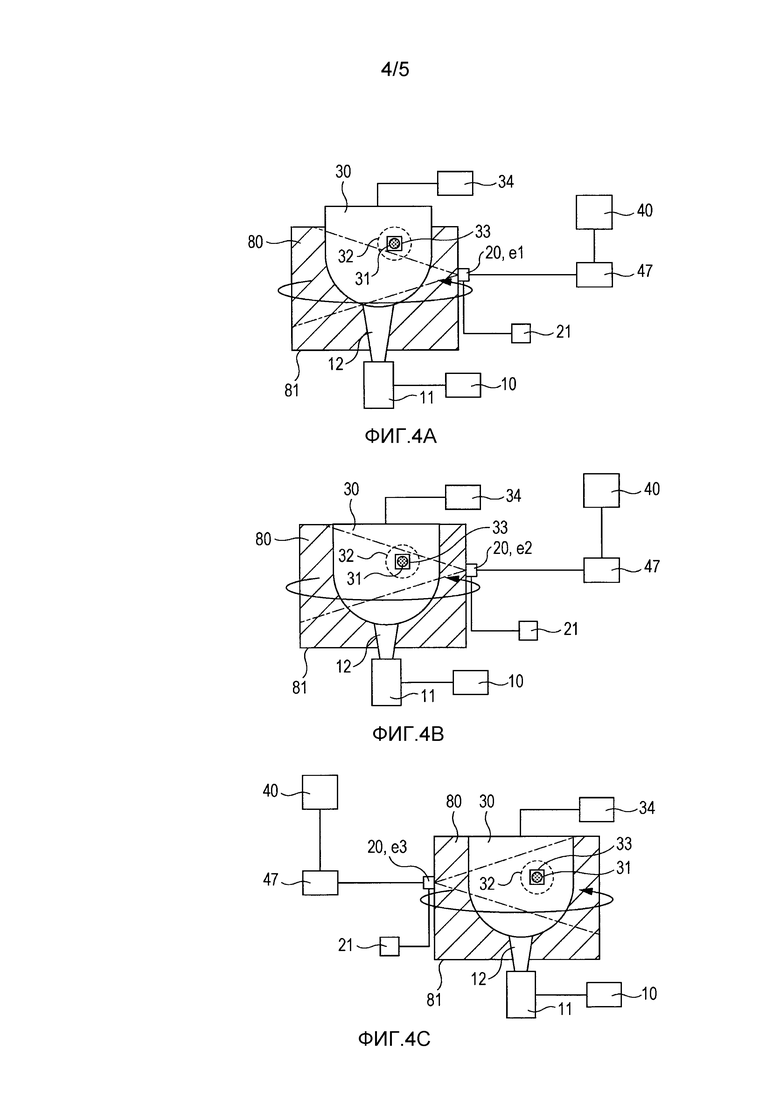
На Фиг. 4A показана блок-схема устройства для получения информации о субъекте согласно четвертому варианту осуществления.
На Фиг. 4B показана блок-схема устройства для получения информации о субъекте согласно четвертому варианту осуществления.
На Фиг. 4C показана блок-схема устройства для получения информации о субъекте согласно четвертому варианту осуществления.
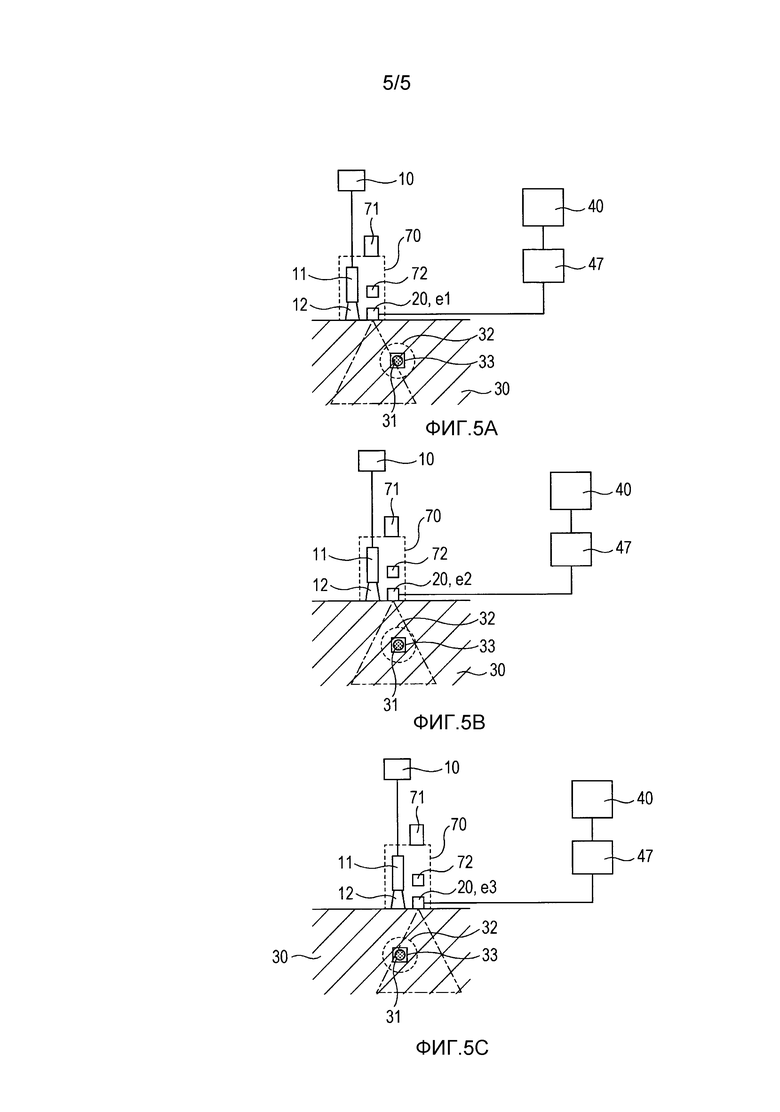
На Фиг. 5A показана блок-схема другого устройства для получения информации о субъекте согласно четвертому варианту осуществления.
На Фиг. 5B показана блок-схема другого устройства для получения информации о субъекте согласно четвертому варианту осуществления.
На Фиг. 5C показана блок-схема другого устройства для получения информации о субъекте согласно четвертому варианту осуществления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
При фотоакустической визуализации сигнал обнаружения, получаемый путем обнаружения фотоакустической волны, включает в себя фоновый шум. Таким образом, при фотоакустической визуализации желательно получать начальное звуковое давление в интересующей области без использования сигнала обнаружения, включающего в себя фоновый шум и отношение сигнал/шум (S/N) которого являет низким. Например, в PTL 2 описано, что хотя этот пример относится к ультразвуковой визуализации, элемент обнаружения акустических волн не допускает приема акустической волны из интересующей области, когда угол между интересующей областью и элементом обнаружения акустических волн меньше некоторого значения или равен ему (когда интересующая область не включена в конкретную область чувствительности, соответствующую элементу обнаружения акустических волн). Используя такой способ, получают ультразвуковое изображение без использования сигнала обнаружения с низким значением S/N.
Таким образом, автор настоящего изобретения применил технологию, описанную в PTL 2, к фотоакустической визуализации. Конкретнее, начальное звуковое давление в интересующей области получают путем выполнения реконфигурации посредством моделирования, не используя сигнал обнаружения, полученный элементом обнаружения акустических волн, конкретная область чувствительности которого не включает в себя интересующую область. Поскольку начальное звуковое давление, найденное таким способом, представляет собой начальное звуковое давление, реконфигурированное без использования сигнала обнаружения, в котором отношение S/N мало, ошибка, связанная с шумом, мала. Кроме того, автор настоящего изобретения получил коэффициент поглощения в интересующей области, используя это начальное звуковое давление и способ, описанный в PTL 1. Однако значение коэффициента поглощения, рассчитанное с использованием вышеуказанного способа, отличается от значения коэффициента поглощения, установленного в моделировании.
Таким образом, в результате исследования, проведенного автором настоящего изобретения по данной проблематике, обнаружено, что проблема заключается в том, что в то время как сигналы обнаружения, используемые для получения начального звукового давления, отбираются на основании чувствительностей элементов обнаружения акустических волн, чувствительности элементов обнаружения акустических волн не рассматриваются, когда требуется получить значение интегральной интенсивности светового излучения.
Таким образом, автор настоящего изобретения обнаружил, что когда требуется получить коэффициент поглощения, коэффициент поглощения в качестве значения оптической характеристики может быть точно определен путем получения значения интегральной интенсивности светового излучения на основании чувствительностей элементов обнаружения акустических волн в дополнение к выбору используемых сигналов обнаружения на основании чувствительностей элементов обнаружения акустических волн.
Ниже будут описаны варианты осуществления настоящего изобретения с использованием моделирования.
ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
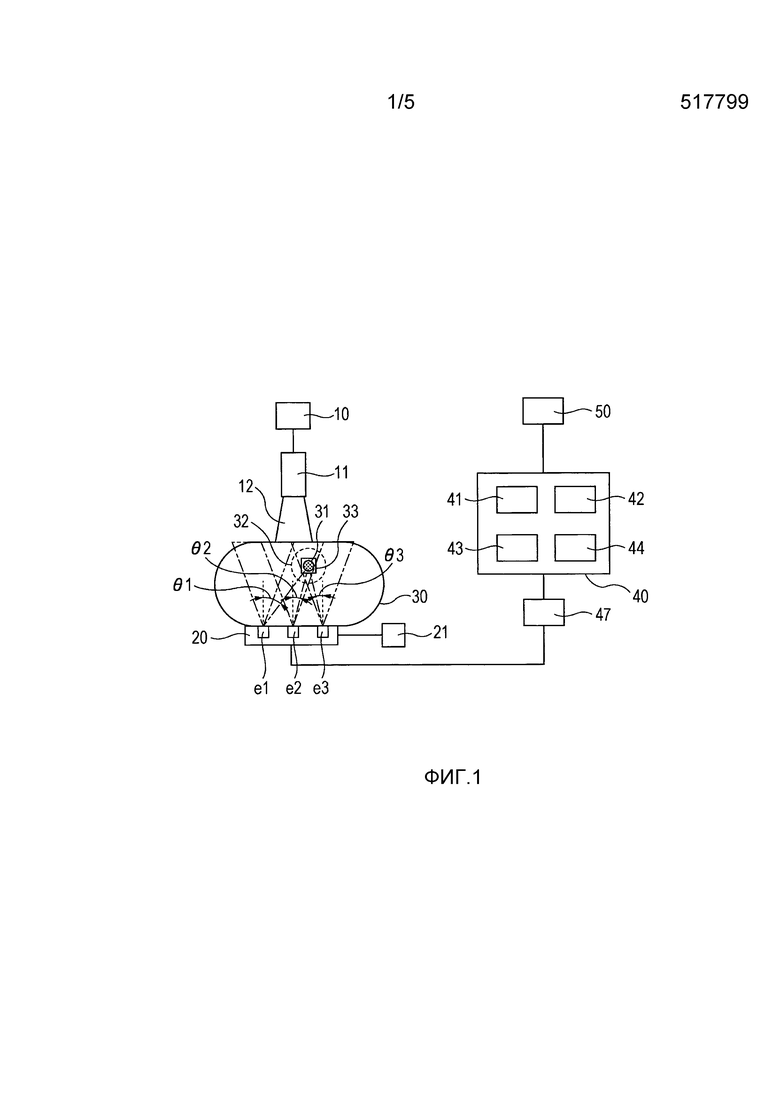
На Фиг. 1 показана блок-схема устройства для получения информации о субъекте согласно настоящему варианту осуществления. Импульсный свет, испускаемый световым источником 10, направляется в оптическую систему 11 и излучается на субъекта 30 в виде светового излучения 12. Фотоакустическая волна 32, формируемая светопоглотителем 31 внутри субъекта 30, распознается детектором 20 акустических волн, включающим в себя элементы e1, e2 и e3 обнаружения акустических волн. Множество сигналов обнаружения, полученных детектором 20 акустических волн, усиливаются и подвергаются цифровому преобразованию коллектором 47 сигналов, после чего сохраняются в памяти устройства 40 обработки сигналов. Затем модуль 42 получения начального звукового давления, представленный в виде блока получения начального звукового давления, входящий в состав устройства 40 обработки сигналов, представленного в виде блока обработки сигнала, реконфигурирует изображение, используя множество сигналов обнаружения, чтобы получить начальное звуковое давление в интересующей области 33 внутри субъекта 30. Кроме того, модуль 43 получения интенсивности светового излучения, представленный в виде блока получения интенсивности светового излучения, входящий в состав устройства 40 обработки сигналов, получает значение интегральной интенсивности светового излучения в интересующей области 33. Затем модуль 44 получения значения оптической характеристики, представленный в виде блока получения значения оптической характеристики, входящий в состав устройства 40 обработки сигналов, получает значение оптической характеристики в интересующей области 33, используя начальное звуковое давление и значение интенсивности светового излучения в интересующей области 33. Полученное значение оптической характеристики далее отображается на устройстве 50 отображения, представленном в виде блока отображения.
В данном случае интересующая область относится к вокселю, представляющему собой единицу области, реконфигурированной модулем 42 получения начального звукового давления. Следует отметить, что модуль 42 получения начального звукового давления может получить распределение начального звукового давления по всему субъекту, задавая интересующую область по всему субъекту 30. Кроме того, точно так же модуль 43 получения интенсивности светового излучения и модуль 44 получения значения оптической характеристики могут получить распределение значений интегральной интенсивности светового излучения и распределение коэффициентов поглощения по всему субъекту, задавая интересующую область по всему субъекту.
Здесь сигналы обнаружения, соответствующие интересующей области 33, полученные элементами e1, e2 и e3 обнаружения акустических волн, показанными на Фиг. 1, обозначены Pd1(rT), Pd2(rT) и Pd3(rT) соответственно. Кроме того, в отношении фотоакустической волны, падающей от фронта фотоэлемента обнаружения акустических волн, эффективность преобразования фотоакустической волны, падающей под углом θ относительно фронта элемента обнаружения акустических волн, в сигнал обнаружения обозначен A(θ). Помимо этого, если углы расположения элементов обнаружения акустических волн относительно интересующей области 33 обозначены соответственно θ1, θ2 и θ3, коэффициенты преобразования согласно направленности элементов обнаружения акустических волн могут выражаться как A(θ1), A(θ2) и A(θ3) соответственно. Кроме того, значения интенсивности светового излучения в интересующей области 33, соответствующие сигналам Pd1(rT), Pd2(rT) и Pd3(rT) обнаружения, обозначены Ф1(rT), Ф2(rT) и Ф3(rT) соответственно. В данном варианте осуществления интересующая область 33 установлена в точке rT расположения светопоглотителя 31.
В данном случае расстояние от элемента обнаружения акустических волн до интересующей области 33 обозначено r, скорость прохождения фотоакустической волны в субъекте обозначена c, а время, в которое световое излучение 12 испускается на субъекта 30, обозначено t=0. В этом случае сигналы обнаружения, соответствующие интересующей области, относятся к сигналам обнаружения, полученным элементами обнаружения акустических волн в момент времени t=r/c. Помимо этого, значения интенсивности светового излучения в интересующей области 33, соответствующие сигналам обнаружения, связанным с интересующей областью, относятся к значениям интенсивности светового излучения 12 в интересующей области 33, испущенного в момент времени t=0.
ПРИМЕР МОДЕЛИРОВАНИЯ БЕЗ ИСПОЛЬЗОВАНИЯ СИГНАЛА ОБНАРУЖЕНИЯ
Далее со ссылкой на Фиг. 1 будет описан пример моделирования, при котором коэффициент поглощения получают из начального звукового давления, найденного без использования сигнала обнаружения на основании чувствительностей элементов обнаружения акустических волн. При таком моделировании коэффициент поглощения светопоглотителя 31 был установлен равным µa=0,088/мм.
Сначала модуль 42 получения начального звукового давления определяет начальное звуковое давление P0(rT) в интересующей области 33, используя сигналы Pd1(rT), Pd2(rT) и Pd3(rT) обнаружения и коэффициенты A(θ1), A(θ2) и A(θ3) преобразования согласно выражению (2).

Здесь сигналы обнаружения, полученные моделированием, и коэффициенты преобразования, заданные при моделировании, имели следующие значения:
Pd1(rT)=132 Pa
Pd2(rT)=231 Pa
Pd3(rT)=198 Pa
A(θ1)=0,4
A(θ2)=0,7
A(θ3)=0,6
Соответственно начальное звуковое давление, рассчитанное по выражению (2) с использованием этих параметров, составляет P0(rT)=990.
Кроме того, на Фиг. 1 области (конкретные области чувствительности), в которых коэффициенты преобразования элементов обнаружения акустических волн превышают определенное значение, представлены треугольными областями, обозначенными пунктирными линиями. В этом случае таким установленным значением является коэффициент преобразования A(θ)=0,5.
В данном варианте осуществления интересующая область 33 не включена в треугольную область (конкретную область чувствительности), соответствующую элементу e1 обнаружения акустических волн. Таким образом, модуль 42 получения начального звукового давления определяет начальное звуковое давление P0′(rT) в интересующей области 33, представленное выражением (3), без использования сигнала Pd1(rT) обнаружения, соответствующего интересующей области 33, полученного элементом e1 обнаружения акустических волн.
Соответственно начальное звуковое давление в интересующей области 33, рассчитанное по выражению (3) с использованием вышеприведенных параметров, составило P0′(rT)=660.
Затем модуль 43 получения интенсивности светового излучения определяет значение интегральной интенсивности светового излучения в субъекте из фонового оптического коэффициента субъекта и т.п., используя метод Монте-Карло для распространения света, уравнение переноса, уравнение диффузии света и пр.
Например, модуль 43 получения интенсивности светового излучения определяет значения интенсивности Ф1(rT), Ф2(rT) и Ф3(rT) светового излучения в интересующей области 33, соответствующие сигналам Pd1(rT), Pd2(rT) и Pd3(rT) обнаружения соответственно.
Модуль 43 получения интенсивности светового излучения далее получает значение интегральной интенсивности Ф(rT) светового излучения в интересующей области 33, представленное выражением (4), используя данные значения.

Здесь значения интенсивности светового излучения в интересующей области, полученные моделированием, были следующими:
Ф1(rT)=3,750 мДж/м2
Ф2(rT)=3,750 мДж/м2
Ф3(rT)=3,750 мДж/м2
Соответственно значение интегральной интенсивности светового излучения в интересующей области, полученное из выражения (4) с использованием этих параметров, составило Ф(rT)=11,250 мДж/м2.
Далее модуль 44 получения значения оптической характеристики определяет коэффициент µa(rT) поглощения в интересующей области 33, представленный выражением (5), используя начальное звуковое давление P0′(rT) в интересующей области 33, представленное выражением (3), и значение интегральной интенсивности Ф(rT) светового излучения в интересующей области 33, представленное выражением (4).
Здесь коэффициент Грюнайзена Г=1.
В этом случае коэффициент поглощения в интересующей области 33, заданный в местоположении rT светопоглотителя, рассчитанный согласно выражению (5) с использованием вышеприведенных параметров, составляет µa=0,059/мм. С другой стороны, коэффициент поглощения светопоглотителя 31, заданный при моделировании, составляет µa=0,088/мм. Таким образом, можно видеть, что коэффициент поглощения, полученный согласно выражению (5), меньше заданного значения. Иначе говоря, когда коэффициент поглощения должен быть получен, используя начальное звуковое давление, найденное с применением вышеописанного способа, требуется дальнейшее уточнение, чтобы получить значение интегральной интенсивности светового излучения.
ПРИМЕР МОДЕЛИРОВАНИЯ БЕЗ ИСПОЛЬЗОВАНИЯ СИГНАЛА ОБНАРУЖЕНИЯ И ЗНАЧЕНИЯ ИНТЕНСИВНОСТИ СВЕТОВОГО ИЗЛУЧЕНИЯ
Таким образом, способ получения информации в отношении субъекта согласно настоящему варианту осуществления, разработанный автором настоящего изобретения, будет описан ниже со ссылкой на блок-схему алгоритма, представленную на Фиг. 2. Следующие порядковые номера согласуются с порядковыми номерами этапов обработки информации, проиллюстрированными на Фиг. 2.
S100: Этап установки конкретных областей чувствительности на основании распределения чувствительности элементов обнаружения акустических волн.
На этом этапе определенные области чувствительности, соответствующие множеству элементов обнаружения акустических волн, устанавливаются на основании распределения чувствительности множества элементов обнаружения акустических волн. Таблицы конкретных областей чувствительности, соответствующих элементам обнаружения акустических волн, хранятся в памяти устройства 40 обработки сигналов.
В данном случае установочный модуль 41, представленный в виде установочного блока, входящий в состав устройства 40 обработки сигналов, может задавать области, в которых чувствительности элементов обнаружения акустических волн превышают определенное значение, в качестве конкретных областей чувствительности. Следует отметить, что конкретное значение может автоматически задаваться установочным модулем 41 на основании шума системы. Кроме того, конкретное значение может определяться оператором путем отображения чувствительности элементов обнаружения акустических волн на устройстве 50 отображения в виде гистограммы и путем выбора конкретного значения на основании гистограммы. На данном этапе конкретное значение предпочтительно выбирается с учетом шума системы.
В данном случае чувствительности элементов обнаружения акустических волн определяются, например, из коэффициентов преобразования элементов обнаружения акустических волн, коэффициентов затухания, показывающих затухание, вызванное диффузией и рассеиванием фотоакустической волны при распространении из интересующей области на элементы обнаружения акустических волн, и т.п. Следует отметить, что коэффициенты преобразования определяются из углов, под которыми фотоакустическая волна падает на элементы обнаружения акустических волн, и т.п. Кроме того, коэффициенты затухания определяются из расстояний между интересующей областью и элементами обнаружения акустических волн и т.п.
Например, в случае примера моделирования, описанного выше, установочный модуль 41 задает коэффициент преобразования A(θ)=0,5 в качестве конкретного значения. Кроме того, в отношении каждого из элементов e1, e2 и e3 обнаружения акустических волн область, в которой коэффициент преобразования A(θ) превышает 0,5, указан треугольной областью. В результате интересующая область 33 не включена в область (конкретную область чувствительности), в которой коэффициент преобразования A(θ) элемента e1 обнаружения акустических волн превышает 0,5.
Кроме того, конкретные области чувствительности могут задаваться на основании произвольных областей, выбранных на изображении распределения чувствительности элементов обнаружения акустических волн.
Например, сначала устройство 50 отображения принудительно отображает данные изображений, касающиеся распределения чувствительности элементов обнаружения акустических волн, хранящиеся в памяти устройства 40 обработки сигналов. Далее оператор выбирает произвольные области, используя устройство ввода PC, на отображенном изображении распределения чувствительности. Следовательно, установочный модуль 41 может задать выбранные произвольные области в качестве конкретных областей чувствительности. На данном этапе, например, каждая произвольная область может выбираться путем соединения начальной точки и конечной точки, используя распознавания с помощью «мыши» или способ распознавания с помощью датчика на сенсорной панели, пока изображение области чувствительности отображается на экране.
Следует отметить, что установочный модуль 41 вместо этого может задавать конкретные области чувствительности на основании распределения чувствительности выбранных произвольных областей. Например, конкретные области чувствительности могут задаваться с использованием наименьшей чувствительности в качестве привязки.
Кроме того, конкретная область чувствительности может индивидуально устанавливаться для каждого из элементов обнаружения акустических волн, либо конкретная область чувствительности может устанавливаться для единственного элемента обнаружения акустических волн, при этом та же область чувствительности в качестве конкретной области чувствительности может устанавливаться для каждого из остальных элементов обнаружения акустических волн.
S200: Этап получения начального звукового давления в интересующей области, не используя сигнал обнаружения, полученный элементом обнаружения акустических волн, конкретная область чувствительности которого не включает в себя интересующую область.
На этом этапе начальное звуковое давление в интересующей области определяется без использования сигнала обнаружения, соответствующего интересующей области, полученного элементом обнаружения акустических волн, конкретная область чувствительности которого, установленная на этапе S100, не включает в себя интересующую область. После этого данные, касающиеся начального звукового давления, хранятся в памяти устройства 40 обработки сигналов.
Например, в случае примера моделирования, описанного выше, интересующая область 33 не была включена в конкретную область чувствительности, соответствующую элементу e1 обнаружения акустических волн. Таким образом, модуль 42 получения начального звукового давления получает начальное звуковое давление P0′(rT), представленное выражением (4), путем реконфигурации изображения без использования среди сигналов Pd1(rT), Pd2(rT) и Pd3(rT) обнаружения сигнала Pd1(rT) обнаружения, соответствующего интересующей области, который получен элементом e1 обнаружения акустических волн.
На данном этапе в качестве алгоритма реконфигурации изображения, выполняемого модулем 42 получения начального звукового давления, например, может использоваться обратное проецирование во временной области или преобразование Фурье, которые обычно используются в томографии и т.п.
Следует отметить, что в настоящем изобретении, если конкретная область чувствительности включена по меньшей мере в часть интересующей области, можно говорить о том, что интересующая область включена в конкретную область чувствительности.
Кроме того, в настоящем изобретении неиспользование сигнала обнаружения является понятием, включающим в себя неиспользование сигнала обнаружения полностью, а также по существу неиспользование сигнала обнаружения при получении начального звукового давления.
S300: Этап получения значения интегральной интенсивности светового излучения в интересующей области без использования значения интенсивности светового излучения, соответствующего сигналу обнаружения, не использованному для получения начального звукового давления.
На этом этапе значение интегральной интенсивности светового излучения в интересующей области получают без использования значения интенсивности светового излучения в интересующей области, соответствующего сигналу обнаружения, который не был использован на этапе S200. После этого данные, касающиеся значения интегральной интенсивности светового излучения, хранятся в памяти устройства 40 обработки сигналов.
Например, модуль 43 получения интенсивности светового излучения получает значение интегральной интенсивности Ф′(rT) светового излучения в интересующей области, представленное выражением (6), без использования среди значений интенсивности Ф1(rT), Ф2(rT) и Ф3(rT) светового излучения значения интенсивности Ф1(rT) светового излучения в интересующей области, соответствующего сигналу обнаружения Pd1(rT), который не был использован модулем 42 получения начального звукового давления.

Иначе говоря, модуль 43 получения интенсивности светового излучения получает значение интегральной интенсивности светового излучения в интересующей области, используя значения интенсивности светового излучения в интересующей области, соответствующие сигналам обнаружения, которые были использованы, когда модуль 42 получения начального звукового давления вычислил начальное звуковое давление.
Здесь значение интегральной интенсивности светового излучения в интересующей области 33, полученное согласно выражению (6) с использованием вышеприведенных параметров, составляет Ф′(rT)=7,500 мДж/м2.
Следует отметить, что в настоящем изобретении неиспользование значения интенсивности светового излучения является понятием, включающим в себя неиспользование значения интенсивности светового излучения полностью, а также по существу неиспользование значения интенсивности светового излучения при получении значения интегральной интенсивности светового излучения.
Кроме того, в данном варианте осуществления, поскольку условия светового излучения 12 являются постоянными, интенсивность светового излучения, испущенного на интересующую область 33, остается неизменной. Таким образом, значения интенсивности светового излучения, соответствующие множеству сигналов обнаружения, полученных множеством элементов обнаружения акустических волн, также остаются неизменными. В этом случае модуль 43 получения интенсивности светового излучения может определить значение, полученное умножением числа сигналов обнаружения, использованных, когда модуль 42 получения начального звукового давления получил начальное звуковое давление, на интенсивность светового излучения, достигшего интересующей области 33, в качестве значения интегральной интенсивности светового излучения в интересующей области 33. В настоящем изобретении значение интегральной интенсивности светового излучения, полученное таким способом, рассматривается в качестве значения интегральной интенсивности светового излучения, полученного без использования значения интенсивности светового излучения.
S400: Этап получения значения оптической характеристики в интересующей области, используя начальное звуковое давление, а также значение интегральной интенсивности светового излучения в интересующей области.
На этом этапе коэффициент поглощения в качестве значения оптической характеристики в интересующей области получают, используя начальное звуковое давление в интересующей области, полученное на этапе S200, а также значение интегральной интенсивности светового излучения в интересующей области, полученное на этапе S300.
Например, в случае примера моделирования, описанного выше, модуль 44 получения значения оптической характеристики использует начальное звуковое давление P0′(rT), представленное выражением (3), а также значение интегральной интенсивности Ф′(rT) светового излучения, представленное выражением (6), в выражении (1). При этом получают коэффициент поглощения µa(rT) в интересующей области 33, представленный выражением (7). Здесь коэффициент Грюнайзена Г=1.

Например, коэффициент поглощения в интересующей области 33, полученный согласно выражению (7) с использованием вышеприведенных параметров, составляет µa=0,088/мм. С другой стороны, коэффициент поглощения в интересующей области 33, полученный согласно выражению (5), составляет µa=0,059/мм. Кроме того, коэффициент поглощения светопоглотителя 31, заданный в моделировании, составляет µa=0,088/мм. Иначе говоря, согласно выражению (7) можно получить точное значение коэффициента поглощения в отличие от выражения (5).
Как описано выше, коэффициент поглощения, в котором ошибка, связанная с шумом, мала, а его количественное значение велико, в отношении элемента обнаружения акустических волн, конкретная область чувствительности которого не включает в себя интересующую область, может быть получен путем неиспользования сигнала обнаружения, соответствующего интересующей области, полученного этим элементом обнаружения акустических волн, а также значения интенсивности светового излучения в интересующей области, соответствующего этому сигналу обнаружения.
Следует отметить, что, наоборот, используя вышеперечисленные этапы для множества длин волн, можно получить коэффициент поглощения для каждой длины волны. Кроме того, применяя эти коэффициенты поглощения, можно определить насыщение кислородом, используемое в качестве значения оптической характеристики.
По альтернативному варианту программа, включающая в себя вышеперечисленные этапы, может выполняться устройством 40 обработки сигналов, представленным в виде компьютера.
ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
На Фиг. 3A-3C показаны блок-схемы устройства для получения информации о субъекте согласно настоящему варианту осуществления.
Устройство для получения информации о субъекте согласно настоящему варианту осуществления включает в себя детектор 20 акустических волн, содержащий единственный элемент обнаружения акустических волн. Кроме того, имеется механизм 21 перемещения детектора, предназначенный для перемещения субъекта 30 и детектора 20 акустических волн относительно друг друга. В данном варианте осуществления механизм 21 перемещения детектора может обнаруживать акустическую волну во множестве точек путем перемещения детектора 20 акустических волн, включающего в себя единственный элемент обнаружения акустических волн, в направлении направо на чертеже. Здесь элемент обнаружения акустических волн в точках, показанных на Фиг. 3A, 3B и 3C, обозначен e1, e2 и e3 соответственно. Кроме того, треугольные области, обозначенные линиями, представляют конкретную область чувствительности, соответствующую элементу обнаружения акустических волн.
В настоящем изобретении множество элементов обнаружения акустических волн относятся к элементу обнаружения акустических волн, который может обнаруживать акустическую волну во множестве точек. Иначе говоря, по данному варианту осуществления элемент обнаружения акустических волн, который может обнаруживать акустическую волну во множестве точек путем перемещения детектора 20 акустических волн, может именоваться множеством элементов обнаружения акустических волн.
Кроме того, устройство для получения информации о субъекте согласно настоящему варианту осуществления оборудовано механизмом 13 перемещения оптической системы, который перемещает оптическую систему 11 с целью перемещения светового излучения 12. Кроме того, в данном варианте осуществления детектор 20 акустических волн и световое излучение 12 перемещаются синхронно друг другу. Таким образом, путем перемещения детектора 20 акустических волн и светового излучения 12 синхронно друг другу световое излучение 12 постоянно испускается на определенную область чувствительности (треугольную область), соответствующую элементу обнаружения акустических волн, что позволяет постоянно получать сигнал обнаружения с высоким значением S/N.
В устройстве для получения информации о субъекте согласно настоящему варианту осуществления, также как и в первом варианте осуществления, интересующая область 33 не включена в конкретную область чувствительности, соответствующую элементу e1 обнаружения акустических волн. Таким образом, модуль 42 получения начального звукового давления определяет начальное звуковое давление в интересующей области 33 без использования сигнала обнаружения, соответствующего интересующей области 33, полученного элементом e1 обнаружения акустических волн. После этого модуль 43 получения интенсивности светового излучения определяет значение интегральной интенсивности светового излучения в интересующей области 33 без использования значения интенсивности светового излучения в интересующей области 33, соответствующего сигналу обнаружения, который не был использован для получения начального звукового давления. Затем модуль 44 получения значения оптической характеристики получает коэффициент поглощения в интересующей области 33, представленный выражением (7), используя начальное звуковое давление, а также значение интегральной интенсивности светового излучения. Определив коэффициент поглощения таким способом, в данном варианте осуществления коэффициент поглощения также может быть точно рассчитан.
ТРЕТИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
В первом варианте осуществления и во втором варианте осуществления коэффициент поглощения получен без использования в отношении элемента обнаружения акустических волн, конкретная область чувствительности которого не включает в себя интересующую область, сигнала обнаружения, соответствующего интересующей области, полученного этим элементом обнаружения акустических волн, а также значения интенсивности светового излучения в интересующей области, соответствующего этому сигналу обнаружения. С другой стороны, в данном варианте осуществления коэффициент поглощения получен при снижении сигнала обнаружения и значения интенсивности светового излучения в интересующей области, соответствующего этому сигналу обнаружения.
Способ получения информации в отношении субъекта согласно настоящему варианту осуществления будет описан ниже с использованием устройства для получения информации о субъекте, показанного на Фиг. 1.
В данном варианте осуществления модуль 42 получения начального звукового давления умножает сигнал обнаружения, соответствующий интересующей области 33, полученный элементом e1 обнаружения акустических волн, конкретная область чувствительности которого не включает в себя интересующую область 33, на первый переводной коэффициент. Модуль 42 получения начального звукового давления далее также определяет начальное звуковое давление в интересующей области 33, используя сигнал обнаружения, умноженный на первый переводной коэффициент.
Таким образом, в отношении элемента обнаружения акустических волн, конкретная область чувствительности которого не включает в себя интересующую область, путем умножения сигнала обнаружения, соответствующего интересующей области, полученного элементом обнаружения акустических волн, на первый переводной коэффициент можно получить начальное звуковое давление при снижении сигнала обнаружения, в котором отношение S/N мало. Таким образом, можно получить начальное звуковое давление, в котором ошибка, связанная с шумом, мала.
Затем модуль 43 получения интенсивности светового излучения умножает на второй переводной коэффициент значение интенсивности светового излучения в интересующей области 33, соответствующее сигналу обнаружения, умноженному на первый переводной коэффициент. Далее модуль 43 получения интенсивности светового излучения также определяет значение интегральной интенсивности светового излучения в интересующей области 33, используя значение интенсивности светового излучения, умноженное на второй переводной коэффициент.
После этого модуль 44 получения значения оптической характеристики определяет коэффициент поглощения в интересующей области 33, используя начальное звуковое давление, полученное модулем 42 получения начального звукового давления, а также значение интегральной интенсивности светового излучения, полученное модулем 43 получения интенсивности светового излучения.
Таким образом, путем умножения значения интенсивности светового излучения, соответствующего сигналу обнаружения, на второй переводной коэффициент в дополнение к умножению сигнала обнаружения на первый переводной коэффициент можно точно рассчитать коэффициент поглощения.
Следует отметить, что первый переводной коэффициент и второй переводной коэффициент имеют значения меньше 1. В качестве альтернативы в соответствии с интересующей областью может устанавливаться другой переводной коэффициент. Кроме того, предпочтительно первый переводной коэффициент и второй переводной коэффициент имеют одинаковые значения. Здесь под одинаковыми значениями следует понимать абсолютно одинаковые значения, а также значения, которые становятся по существу одинаковыми при получении коэффициента поглощения.
ЧЕТВЕРТЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ
Настоящее изобретение может применяться к устройству для получения информации о субъекте, показанному на Фиг. 4A-4C, а также к устройству для получения информации о субъекте, показанному на Фиг. 5A-5C. Устройство для получения информации о субъекте, показанное на Фиг. 4A-4C, может обнаруживать акустическую волну во множестве точек путем поворотного перемещения детектора 20 акустических волн вокруг субъекта 30, используя механизм 21 перемещения детектора. Кроме того, для согласования акустических импедансов между субъектом 30 и детектором 20 акустических волн субъект 30 погружен в воду 80, которой заполнен резервуар 81 для воды. Помимо этого, применяется механизм 34 перемещения субъекта, который приводит в движение субъекта 30. Используя такую конфигурацию, можно измерить участок, форму которого нельзя определить с помощью удерживающей панели и т.п. Кроме того, поскольку элементы обнаружения могут устанавливаться во множестве направлений относительно субъекта, можно получить данные, содержащие больше информации.
В случае устройства для получения информации о субъекте, показанного на Фиг. 4A-4C, состояние, представленное на Фиг. 4A, изменяется на состояние, представленное на Фиг. 4B, путем перемещения субъекта в нижнем направлении на чертеже, используя механизм 34 перемещения субъекта. Кроме того, состояние, показанное на Фиг. 4B, изменяется на состояние, показанное на Фиг. 4C, путем перемещения детектора 20 акустических волн, используя механизм 21 перемещения детектора. Здесь элемент обнаружения акустических волн в состояниях, показанных на Фиг. 4A, 4B и 4C, обозначен e1, e2 и e3 соответственно. Кроме того, треугольные области, обозначенные пунктирными линиями, представляют конкретную область чувствительности, соответствующую элементу обнаружения акустических волн.
Помимо этого, устройство для получения информации о субъекте, показанное на Фиг. 5A-5C, оборудовано детектором 20 акустических волн, а также оптической системой 11, которые собраны в едином корпусе 70. Кроме того, корпус 70 оборудован ручным механизмом 71, при этом оператор может перемещать корпус 70, ухватив ручной механизм 71. Благодаря перемещению корпуса 70 таким способом элемент обнаружения акустических волн может обнаруживать акустическую волну во множестве точек. На Фиг. 5A-5C элемент обнаружения акустических волн обнаруживает фотоакустическую волну, когда оператор перемещает корпус 70 вправо на чертеже, ухватив ручной механизм 71. Здесь элемент обнаружения акустических волн в состояниях, показанных на Фиг. 5A, 5B и 5C, обозначен e1, e2 и e3 соответственно. Кроме того, треугольные области, обозначенные пунктирными линиями, представляют конкретную область чувствительности, соответствующую элементу обнаружения акустических волн.
Однако в данном варианте осуществления в отличие от других вариантов осуществления детектор 20 акустических волн не перемещается автоматически, а произвольно перемещается корпус 70 оператором, ухватившим ручной механизм 71. Таким образом, взаимное расположение детектора 20 акустических волн и интересующей области 33 при обнаружении фотоакустической волны 32 невозможно идентифицировать. Однако для того, чтобы выделить сигнал обнаружения, соответствующий интересующей области, из сигнала обнаружения, полученного детектором 20 акустических волн, необходимо идентифицировать взаимное расположение между детектором 20 акустических волн и интересующей областью 33. Таким образом, в данном варианте осуществления предпочтительно корпус 70 включает в себя детектор 72 положения, предназначенный для обнаружения положения корпуса 70, а именно положений детектора 20 акустических волн и оптической системы 11, хранящихся в корпусе 70.
В случаях устройств для получения информации о субъекте, показанных на Фиг. 4A-4C и Фиг. 5A-5C, конкретная область чувствительности, соответствующая элементу e1 обнаружения акустических волн, не включает в себя интересующую область 33. Таким образом, устройство 40 обработки сигналов может получить коэффициент поглощения в интересующей области 33, используя способ получения информации в отношении субъекта, описанный в первом и втором вариантах осуществления, либо способ получения информации в отношении субъекта, описанный в третьем варианте осуществления. Определив коэффициент поглощения таким способом, в данном варианте осуществления коэффициент поглощения также может быть точно рассчитан.
НИЖЕ БУДЕТ ОПИСАНА ПРИНЦИПИАЛЬНАЯ СХЕМА
СВЕТОВОЙ ИСТОЧНИК 10
Световой источник 10 включает в себя световой источник, способный формировать импульсный свет продолжительностью от 5 наносекунд до 50 наносекунд. В качестве светового источника предпочтительно использовать лазер с высокой выходной мощностью, однако вместо лазера можно также использовать светоизлучающий диод. В качестве лазера может использоваться твердотельный лазер, газовый лазер, лазер на красителях, а также полупроводниковый лазер. В идеале используется Ti:S-лазер с Nd:YAG-возбуждением или лазер на александрите с высокой выходной мощностью, дина волны которого может непрерывно изменяться. Вместо этого может применяться множество лазеров, работающих на фиксированных длинах волн, отличных друг от друга.
ОПТИЧЕСКАЯ СИСТЕМА 11
Импульсный свет, излучаемый световым источником 10, направляется на субъекта, подвергаясь обработке таким образом, чтобы он имел требуемую форму оптического распределения, обычно с помощью оптических компонентов, таких как линзы и зеркала, однако имеется также возможность передачи импульсного света, используя оптические волноводы, например оптическое волокно. Оптическая система 11 представляет собой, например, зеркало, отражающее свет, линзу, собирающую или рассеивающую свет, либо изменяющую форму светового излучения, диффузионную пластину, рассеивающую свет, и т.п. Такие оптические компоненты могут представлять собой любые компоненты, которые позволят излучать импульсный свет, испускаемый световым источником, на субъекта в требуемой форме. Следует отметить, что предпочтительно свет распространяется на определенную область, отличную от той, в которой свет собирается линзой, с учетом обеспечения безопасности субъекта и увеличения диагностического диапазона. Следует отметить, что может быть предусмотрен оптический механизм перемещения в оптической системе 11 с целью перемещения светового излучения.
ДЕТЕКТОР 20 АКУСТИЧЕСКИХ ВОЛН
Детектор 20 акустических волн, который представляет собой детектор, распознающий фотоакустическую волну, формируемую на поверхности и внутри субъекта, используя свет, обнаруживает акустическую волну и преобразует акустическую волну в электрический сигнал, представляющий собой аналоговый сигнал. Детектор 20 акустических волн далее будем просто называть зондом или преобразователем. Может применяться любой тип детектора акустических волн, например преобразователь, использующий пьезоэлектрический эффект, преобразователь на основании оптического резонанса или преобразователь, в котором используется изменение емкостного сопротивления, если такой преобразователь способен обнаруживать фотоакустические волновые сигналы.
Кроме того, детектор 20 акустических волн включает в себя множество элементов обнаружения акустических волн. Расположив множество элементов обнаружения акустических волн в одном измерении или двух измерениях в качестве матрицы, фотоакустическую волну можно обнаруживать во множестве точек. Используя такие пространственно расположенные элементы, акустическую волну можно одновременно обнаруживать во множестве точек, что снижает время обнаружения и такой эффект как колебание субъекта.
Следует отметить, что для обеспечения возможности обнаружения фотоакустической волны во множестве точек детектор 20 акустических волн может быть выполнен с возможностью механического перемещения механизмом 21 перемещения детектора. Кроме того, может быть также предусмотрен ручной механизм, захватываемый оператором с целью произвольного перемещения детектора 20 акустических волн.
КОЛЛЕКТОР 47 СИГНАЛОВ
Предпочтительно предусмотрен коллектор 47 сигналов, усиливающий электрический сигнал, полученный детектором 20 акустических волн, и преобразующий электрический сигнал из аналогового сигнала в цифровой сигнал. Коллектор 47 сигналов обычно выполнен в виде усилителя, аналого-цифрового преобразователя, микросхемы FPGA (программируемой вентильной матрицы), и т.п. При получении детектором акустических волн множества сигналов обнаружения желательно, чтобы это множество сигналов можно было обрабатывать одновременно. Соответственно время до построения изображение можно сократить. Следует отметить, что сигнал обнаружения в настоящем описании является понятием, включающим в себя как аналоговый сигнал на выходе детектора 20 акустических волн, так и цифровой сигнал, полученный аналого-цифровым преобразованием, выполняемым коллектором 47 сигналов.
УСТРОЙСТВО 40 ОБРАБОТКИ СИГНАЛОВ
Устройство 40 обработки сигналов получает значение оптической характеристики внутри субъекта путем выполнения реконфигурации изображения или иным аналогичным способом. В качестве устройства 40 обработки сигналов обычно используется рабочая станция или аналогичное устройство, при этом процесс реконфигурации изображения и т.п. обычно выполняется с помощью программного обеспечения, заданного заранее. Например, программное обеспечение, используемое в рабочей станции, включает в себя установочный модуль 41, модуль 42 получения начального звукового давления, модуль 43 получения интенсивности светового излучения, модуль 44 получения значения оптической характеристики и т.п.
Следует отметить, что каждый модуль может предоставляться в виде отдельной части аппаратного обеспечения. В данном случае части аппаратного обеспечения в виде единого целого могут использоваться в качестве устройства 40 обработки сигналов.
Кроме того, коллектор 47 сигналов и устройство 40 обработки сигналов в некоторых случаях могут быть объединены между собой. В данном случае значение оптической характеристики субъекта может быть получено не на уровне программно-реализуемого процесса, например, осуществляемого на рабочей станции, а на уровне аппаратно-реализуемого процесса.
Настоящее изобретение не ограничено вышеприведенными вариантами осуществления и может изменяться и модифицироваться различными способами без отхода от его сущности и объема. Таким образом, объем настоящего изобретения определяется прилагаемой формулой изобретения
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
20 детектор акустических волн
30 субъект
40 устройство обработки сигналов
41 установочный модуль
42 модуль получения начального звукового давления
43 модуль получения интенсивности светового излучения
44 модуль получения значения оптической характеристики
Группа изобретений относится к области медицины. Устройство для получения информации о субъекте, содержащее: световой источник, выполненный с возможностью испускания света, детектор акустических волн, выполненный с возможностью обнаружения во множестве точек фотоакустической волны, формируемой, когда субъект облучается светом, и выдачи множества сигналов обнаружения, соответствующих множеству точек; и блок обработки сигнала, выполненный с возможностью получения информации о значении оптической характеристики в интересующей области внутри субъекта на основании множества сигналов обнаружения. При этом блок обработки сигнала выполнен с возможностью получения информации о значении оптической характеристики в интересующей области, используя часть множества сигналов обнаружения и информацию о значении интенсивности светового излучения в интересующей области, соответствующем части множества сигналов обнаружения, и без использования другой части из множества сигналов обнаружения, исключающей часть множества сигналов обнаружения, и информации о значении интенсивности светового излучения в интересующей области, соответствующем другой части множества сигналов обнаружения. Способ получения информации о значении оптической характеристики в интересующей области внутри субъекта на основании множества сигналов обнаружения, выдаваемых путем обнаружения фотоакустической волны, формируемой в ответ на световое излучение, содержащий этап получения информации о значении оптической характеристики в интересующей области. Применение данного изобретения позволит точно определять значения оптической характеристики. 3 н. и 11 з.п. ф-лы, 5 ил.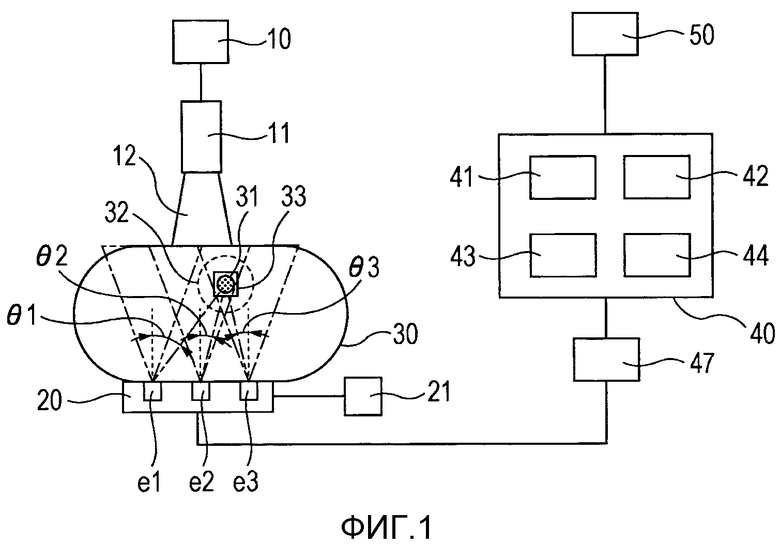
1. Устройство для получения информации о субъекте, содержащее:
световой источник, выполненный с возможностью испускания света, детектор акустических волн, выполненный с возможностью обнаружения во множестве точек фотоакустической волны, формируемой, когда субъект облучается светом, и выдачи множества сигналов обнаружения, соответствующих упомянутому множеству точек; и
блок обработки сигнала, выполненный с возможностью получения информации о значении оптической характеристики в интересующей области внутри субъекта на основании множества сигналов обнаружения,
при этом блок обработки сигнала выполнен с возможностью получения информации о значении оптической характеристики в интересующей области, используя часть множества сигналов обнаружения и информацию о значении интенсивности светового излучения в интересующей области, соответствующем упомянутой части множества сигналов обнаружения, и без использования другой части из множества сигналов обнаружения, исключающей упомянутую часть множества сигналов обнаружения, и информации о значении интенсивности светового излучения в интересующей области, соответствующем упомянутой другой части множества сигналов обнаружения.
2. Устройство для получения информации о субъекте по п. 1,
в котором детектор акустических волн включает в себя множество элементов обнаружения акустических волн.
3. Устройство для получения информации о субъекте по п. 1,
в котором световой источник выполнен с возможностью испускания света во множестве моментов времени, и
при этом детектор акустических волн выполнен с возможностью обнаружения фотоакустической волны, формируемой излучением света во множестве моментов времени, и выдачи множества сигналов обнаружения,
причем детектор акустических волн выполнен с возможностью обнаружения фотоакустической волны, формируемой излучением света в части множества моментов времени, и выдачи части множества сигналов обнаружения,
причем детектор акустических волн выполнен с возможностью обнаружения фотоакустической волны, формируемой излучением света в другой части множества моментов времени, исключающей упомянутую часть множества моментов времени, и выдачи другой части множества сигналов обнаружения.
4. Устройство для получения информации о субъекте по п. 1, дополнительно содержащее:
механизм перемещения детектора, выполненный с возможностью перемещения детектора акустических волн,
при этом механизм перемещения детектора выполнен с возможностью перемещения детектора акустических волн таким образом, что детектор акустических волн обнаруживает фотоакустическую волну во множестве точек,
причем детектор акустических волн выполнен с возможностью обнаружения фотоакустической волны в части множества точек и выдачи части множества сигналов обнаружения,
причем детектор акустических волн выполнен с возможностью обнаружения фотоакустической волны в другой части множества точек, исключающей упомянутую часть множества точек, и выдачи другой части множества сигналов обнаружения.
5. Устройство для получения информации о субъекте по п. 3, дополнительно содержащее:
оптическую систему, выполненную с возможностью направления света от светового источника на субъекта; и
механизм перемещения оптической системы, выполненный с возможностью перемещения оптической системы относительно субъекта,
при этом механизм перемещения оптической системы выполнен с возможностью перемещения оптической системы таким образом, что оптическая система облучает светом множество точек поверхности субъекта,
причем детектор акустических волн выполнен с возможностью обнаружения фотоакустической волны, формируемой излучением света на часть множества точек поверхности субъекта, и выдачи части множества сигналов обнаружения, и
причем детектор акустических волн выполнен с возможностью обнаружения фотоакустической волны, формируемой излучением света на другую часть множества точек поверхности субъекта, исключающую упомянутую часть множества точек, и выдачи другой части множества сигналов обнаружения.
6. Устройство для получения информации о субъекте по п. 1,
в котором блок обработки сигнала выполнен с возможностью
получения информации о значении интегральной интенсивности светового излучения в интересующей области путем интегрирования значения интенсивности светового излучения в интересующей области, соответствующего упомянутой части множества сигналов обнаружения, и
при этом блок обработки сигнала выполнен с возможностью получения информации о значении оптической характеристики в интересующей области, используя упомянутую часть множества сигналов обнаружения и информацию о значении интегральной интенсивности светового излучения в интересующей области.
7. Устройство для получения информации о субъекте по п. 6,
в котором блок обработки сигнала выполнен с возможностью получения информации о начальном звуковом давлении в интересующей области, используя упомянутую часть множества сигналов обнаружения, и
при этом блок обработки сигнала выполнен с возможностью получения информации о значении оптической характеристики в интересующей области, используя информацию о начальном звуковом давлении и информацию о значении интегральной интенсивности светового излучения в интересующей области.
8. Устройство для получения информации о субъекте по п. 1,
в котором блок получения сигналов выполнен с возможностью выбора упомянутой части множества сигналов обнаружения из множества сигналов обнаружения на основании распределения чувствительности детектора акустических волн.
9. Устройство для получения информации о субъекте по п. 1,
в котором детектор акустических волн включает в себя элемент обнаружения акустических волн,
причем, когда чувствительность элемента обнаружения акустических волн в интересующей области равна или выше определенного значения, блок получения сигналов выполнен с возможностью выбора сигнала обнаружения, выдаваемого элементом обнаружения акустических волн, в качестве упомянутой части множества сигналов обнаружения из множества сигналов обнаружения.
10. Устройство для получения информации о субъекте по п. 1,
в котором блок обработки сигнала выполнен с возможностью получения информации о коэффициенте поглощения в интересующей области в качестве значения оптической характеристики в интересующей области.
11. Устройство для получения информации о субъекте по п. 1, в котором блок обработки сигнала выполнен с возможностью сохранения множества сигналов обнаружения,
причем блок обработки сигнала выполнен с возможностью считывания части множества сигналов обнаружения из сохраненного множества сигналов обнаружения, и
при этом блок обработки сигнала выполнен с возможностью получения информации о значении оптической характеристики в интересующей области с использованием считанной части множества сигналов обнаружения.
12. Устройство для получения информации о субъекте по п. 1, дополнительно содержащее механизм перемещения детектора, выполненный с возможностью перемещения детектора акустических волн во множество точек.
13. Способ получения информации о значении оптической характеристики в интересующей области внутри субъекта на основании множества сигналов обнаружения, выдаваемых путем обнаружения фотоакустической волны, формируемой в ответ на световое излучение, содержащий этап, на котором:
получают информацию о значении оптической характеристики в интересующей области, используя часть множества сигналов обнаружения и информацию об интенсивности светового излучения в интересующей области, соответствующей упомянутой части множества сигналов обнаружения, без использования другой части множества сигналов обнаружения, исключающей упомянутую часть множества сигналов обнаружения, и информации об интенсивности светового излучения в интересующей области, соответствующей упомянутой другой части множества сигналов обнаружения.
14. Постоянный машиночитаемый носитель, на котором закодированы инструкции, побуждающие компьютер выполнять способ по п. 13.
| US 2011261056 A1, 27.10.2011 | |||
| US 2010331662 A1, 30.12.2010 | |||
| US 2011270071 A1, 03.11.2011 | |||
| US 2006264717 A1, 23.11.2006 | |||
| Е.В.САВВАТЕЕВА и др | |||
| Лазерная оптоакустическая спектроскопия биотканей | |||
| СОВРЕМЕННЫЕ ЛАЗЕРО-ИНФОРМАЦИОННЫЕ И ЛАЗЕРНЫЕ ТЕХНОЛОГИИ, Сборник трудов ИПЛИТ РАН,Интерконтакт Наука, 2005, сс.183-187. |

