Устройство относится к области применения средств механизации, применяемых на аэродроме, и может быть использовано при конструировании специализированных тележек, самоходных площадок обслуживания, аэродромных самоходных подъемников, подъемных кранов.
Известно устройство выравнивания платформы подъемных механизмов [RU 2483018, B66C 23/78, от 27.05.2013 г., Бюл. №15]. Данное устройство содержит опорную платформу, передвижное шасси, выносные опорные гидравлические цилиндры, устройство управления, датчики контакта штоков гидравлических цилиндров с опорной поверхностью, блок управления, датчик уровня горизонтального положения, который состоит из корпуса, жестко закрепленного на опорной платформе перпендикулярно ее плоскости, в верхней части которого внутри по периферии расположены четыре коммутационных контакта, сориентированные по углам периметра опорной платформы, шаровой опоры с конусом, имеющим центр масс на оси конуса у основания, фиксирующей пружины.
Недостаток данного устройства заключается в наличии конуса с шаровой опорой. В процессе работы из-за вибрации и толчков возможно несанкционированное срабатывание датчика и наличие механического узла трения между фиксирующей пружиной и шаровой опорой конуса ведет к ее износу, что значительно снижает точность выравнивания опорной платформы грузоподъемных механизмов.
Известно другое устройство автоматического выравнивания опорной платформы [RU 2342310, B66C 5/00, B66C 23/78, от 27.12.2008 г., Бюл. №36]. Данное устройство содержит опорную платформу передвижного шасси, поворотную кабину, выносные опорные гидравлические цилиндры с жестко закрепленными на них датчиками контакта штоков гидравлических цилиндров с опорной поверхностью, подающих сигнал о контакте всех штоков на усилительный блок управления, который, в свою очередь, усиливает сигнал с датчиков наклона, сориентированных в продольном и поперечном направлениях, представляющих собой тяжелый шарик и легкую шторку, которые имеют возможность перемещаться в тороидальном канале и кольцевой полости соответственно, до полного перекрытия светочувствительных элементов при достижении горизонтального положения, устройство управления.
Недостаток данного устройства заключается в низкой точности выравнивания и малой эффективности из-за отсутствия антивибрационного устройства.
Известно другое устройство автоматического выравнивания самоходных подъемно-транспортных машин [RU 2342311, B66C 5/00, B66C 23/78, 27.12.2008 г., Бюл. №36]. Данное устройство содержит четыре цилиндра выносных опор с установленными на них датчиками, реагирующими на соприкосновение штока гидравлического цилиндра с опорной поверхностью и подающими сигнал в блок управления, датчики, установленные взаимно перпендикулярно на неповоротной раме, реагирующие на ее отклонение в продольной и поперечной плоскости относительно горизонтальной поверхности и подающие сигнал в блок управления.
Недостаток данного устройства заключается в низкой точности выравнивания из-за отсутствия демпфирующих устройств для гашения колебаний при работе подъемного механизма.
Наиболее близким к заявляемому устройству является устройство автоматического выравнивания в горизонтальной плоскости опорной платформы подъемных механизмов [RU 2307784, B66C 5/00, B66C 23/78, 10.10.2007 г., Бюл. №28]. Данное устройство содержит передвижное шасси, выносные опорные гидравлические цилиндры, устройство управления, выполненное в виде электронного блока, датчики контакта штоков гидравлических цилиндров с опорной поверхностью, датчики уровня горизонтального положения, расположенные по углам опорной платформы, представляющие собой цилиндры, выполненные из диэлектрического материала, заполненные токопроводящей жидкостью и соединенные между собой в пересечении трубопроводов с центральным датчиком, выполненным в виде цилиндра с эталонным уровнем жидкости для угловых датчиков при достижении ими горизонтального положения.
Недостаток данного устройства заключается в зависимости точности и скорости срабатывания устройства от вязкости рабочего тела в крестообразном гидравлическом уровне, которая, в свою очередь, зависит от температуры окружающей среды, длины трубопроводов, соединяющих центральный датчик с периферийными, что существенно влияет на выбор рабочей жидкости и применения в различных климатических условиях.
Техническим результатом, достигаемый предлагаемым устройством, является автоматическое выравнивание в горизонтальной плоскости опорной платформы, сокращение времени и повышение точности выравнивания.
Предлагаемое устройство выравнивания аэродромного грузоподъемного механизма содержит опорную платформу и установленный на ней датчик выравнивания опорной платформы в горизонтальное положение, выносные опорные гидравлические цилиндры, датчики контакта штоков гидравлических цилиндров с опорной поверхностью, панель и блок управления подъемом и опусканием штоков выносных гидравлических цилиндров. Датчик выравнивания опорной платформы в горизонтальное положение состоит из корпуса в форме цилиндра, выполненного из диэлектрического материала, в котором расположены коммутационные контакты (один основной и четыре периферийных), токопроводящая жидкость, и демпфирующего узла в основании корпуса.
Общими признаками прототипа и заявляемого устройства являются опорная платформа, выносные опорные гидравлические цилиндры, датчики контакта штоков гидравлических цилиндров с опорной поверхностью, датчики выравнивания опорной платформы в горизонтальное положение, панель управления, блок управления.
Отличительным признаком является конструкция датчика выравнивания опорной платформы в горизонтальное положение. Датчик состоит из корпуса в форме цилиндра, в котором расположены токопроводящая жидкость, контактов, сориентированных в направлении гидроцилиндров, и демпфирующего узла в основании корпуса.
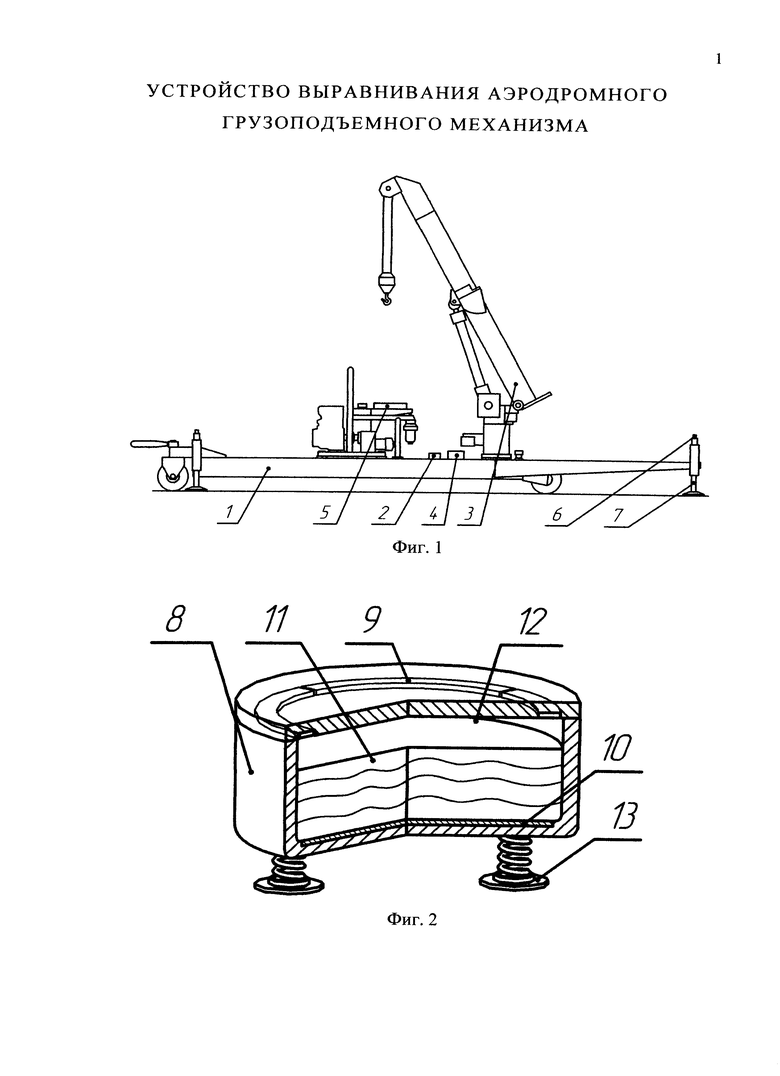
Заявляемое устройство изображено: на фиг.1 - вид сбоку устройства выравнивания аэродромного грузоподъемного механизма; на фиг.2 - датчик выравнивания опорной платформы в горизонтальное положение; на фиг.3 - принципиальная гидравлическая схема устройства выравнивания аэродромного грузоподъемного механизма.
На фиг. 1 изображено устройство выравнивания аэродромного грузоподъемного механизма, включающее следующие элементы: опорную платформу 1, датчик выравнивания опорной платформы в горизонтальное положение 2, грузоподъемная стрела 3, блок управления 4, панель управления 5, датчики контакта штоков гидравлических цилиндров с опорной поверхностью 6, выносные гидравлические цилиндры 7.
На фиг. 2 изображен датчик выравнивания опорной платформы в горизонтальное положение, включающий следующие элементы: корпус 8, периферийные коммутационные контакты 9, основной коммутационный контакт 10, токопроводящая жидкость 11, пространство, не заполненное жидкостью 12, демпферное устройство для гашения вибрационных колебаний 13.
На фиг. 3 изображена принципиальная гидравлическая схема устройства выравнивания аэродромного грузоподъемного механизма, включающая следующие элементы: выносные гидравлические цилиндры 7, гидравлический бак 14, насос 15, фильтр 16, трехпозиционный электромагнитный клапан 17, двухпозиционные электромагнитные клапаны 18.
Устройство работает следующим образом. Перед началом работы оператор на панели управления 5 переводит тумблер в положение опускания штоков выносных гидравлических цилиндров 7, которое происходит до их контакта с опорной поверхностью. После срабатывания датчиков контакта с опорной поверхностью 6 сигнал подается в блок управления 4 на включение автоматического выравнивания платформы. Осуществление выравнивания происходит по сигналу с датчика выравнивания опорной платформы в горизонтальное положение 2. При отклонении опорной платформы 1 от горизонтального положения, при этом токопроводящая жидкость замыкает коммутационные контакты 9-10, тем самым подает команду на приведение в движение соответствующих выносных гидравлических цилиндров 7. Поверхность считается выровненной в том случае, когда токопроводящая жидкость не замыкает коммутационные контакты.
Изготовление устройства возможно из узлов и агрегатов, выпускаемых промышленностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ВЫРАВНИВАНИЯ ПЛАТФОРМ АЭРОДРОМНЫХ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2014 |
|
RU2565854C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2014 |
|
RU2556136C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ПЛАТФОРМ АЭРОДРОМНЫХ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2014 |
|
RU2582563C2 |
| УСТРОЙСТВО ВЫРАВНИВАНИЯ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2011 |
|
RU2483018C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ОПОРНОЙ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2006 |
|
RU2307784C1 |
| КРЕНОВО-ТАНГАЖНОЕ ОТВЕСНОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ОПОРНОЙ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2007 |
|
RU2340543C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ОПОРНОЙ ПЛАТФОРМЫ | 2007 |
|
RU2342310C1 |
| Гидросистема механизма выравнивания опорно-поворотного устройства гидроманипулятора лесотранспортной машины | 2021 |
|
RU2762905C1 |
| МОБИЛЬНАЯ АНТЕННАЯ УСТАНОВКА | 2019 |
|
RU2737921C1 |
| УСТРОЙСТВО ОПОРНОЕ | 2023 |
|
RU2830436C1 |

Изобретение относится к области средств механизации, применяемых на аэродроме. Устройство выравнивания аэродромного грузоподъемного механизма содержит опорную платформу и установленные на ней датчик выравнивания опорной платформы в горизонтальное положение, выносные опорные гидравлические цилиндры, датчики контакта штоков гидравлических цилиндров с опорной поверхностью, панель и блок управления подъемом и опусканием штоков выносных гидравлических цилиндров. Датчик выравнивания опорной платформы в горизонтальное положение состоит из корпуса в форме цилиндра, выполненного из диэлектрического материала, в котором расположены коммутационные контакты, токопроводящая жидкость и демпфирующий узел в основании корпуса. Достигается автоматическое выравнивание в горизонтальной плоскости опорной платформы, сокращение времени и повышение точности выравнивания. 3 ил.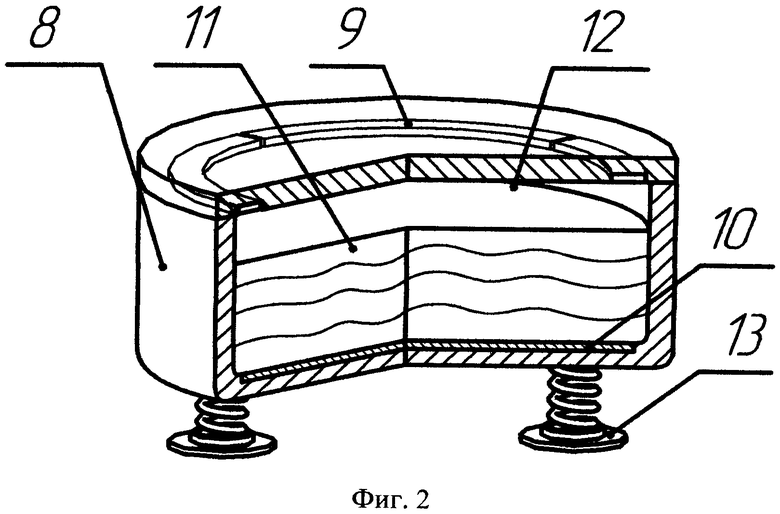
Устройство выравнивания аэродромного грузоподъемного механизма, состоящее из опорной платформы, выносных опорных гидравлических цилиндров, панели управления, датчиков контакта штоков гидравлических цилиндров с опорной поверхностью, блока управления, датчика выравнивания опорной платформы в горизонтальное положение, отличающееся тем, что датчик выравнивания опорной платформы установлен на опорной платформе и выполнен в виде герметично закрытого цилиндра, а внутри расположены коммутационные контакты, сориентированные в направлении выносных гидравлических цилиндров, при этом полость цилиндра не полностью заполнена токопроводящей жидкостью.
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ОПОРНОЙ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2006 |
|
RU2307784C1 |

