Устройство относится к области применения средств механизации на аэродроме и может быть использовано при конструировании специализированных тележек, самоходных площадок обслуживания, аэродромных самоходных подъемников, подъемных кранов.
Известно устройство автоматического выравнивания в горизонтальной плоскости опорной платформы подъемных механизмов [RU 2307784, B66C 5/00, B66C 23/78, 10.10.2007 г., Бюл. №28]. Данное устройство содержит: передвижное шасси, выносные опорные гидравлические цилиндры, устройство управления, выполненное в виде электронного блока, датчики контакта штоков гидравлических цилиндров с опорной поверхностью, датчики уровня горизонтального положения, расположенные по углам опорной платформы, представляющие собой цилиндры, выполненные из диэлектрического материала, заполненные токопроводящей жидкостью и соединенные между собой в пересечении трубопроводов с центральным датчиком, выполненным в виде цилиндра с эталонным уровнем жидкости для угловых датчиков при достижении ими горизонтального положения.
Недостаток данного устройства заключается в зависимости точности и скорости срабатывания устройства от вязкости рабочего тела в крестообразном гидравлическом уровне, которая в свою очередь изменяется от температуры окружающей среды, что существенно влияет на выбор рабочей жидкости и применение в различных климатических условиях.
Известно устройство автоматического выравнивания самоходных подъемно-транспортных машин [RU 2342311, B66C 5/00, B66C 23/78, 27.12.2008 г., Бюл. №36]. Данное устройство содержит: четыре гидравлических цилиндра выносных опор с установленными на них датчиками, реагирующими на соприкосновение штока гидравлического цилиндра с опорной поверхностью и подающими сигнал в блок управления, датчики, установленные взаимно перпендикулярно на неповоротной раме, реагирующие на ее отклонение в продольной и поперечной плоскости относительно горизонтальной поверхности и подающие сигнал в блок управления.
Недостаток данного устройства заключается в низкой точности выравнивания из-за отсутствия демпфирующих устройств, предназначенных для гашения колебаний при работе подъемного механизма, что может вызвать самопроизвольное срабатывание датчика.
Известно другое креново-тангажное отвесное устройство автоматического выравнивания опорной платформы подъемных механизмов [RU 2340543, B66C 5/00, B66C 23/78, 10.12.2008 г., Бюл. №34]. Данное устройство содержит: передвижное шасси, опорную платформу, поворотную кабину, выносные опорные гидравлические цилиндры, панель управления подъемом и опусканием штоков выносных гидравлических цилиндров, датчики контакта штоков гидравлических цилиндров с опорной поверхностью, датчик уровня горизонтального положения с реостатными направляющими, сориентированными в продольной и поперечной плоскостях.
Недостаток данного устройства заключается в наличии реостатной обмотки и подвижного щеточного контактного узла, снижающего надежность устройства, так как в процессе работы возможно подгорание контактов и их залипание, что негативно влияет на точность выравнивания опорной платформы подъемно-транспортной машины.
Наиболее близким к заявляемому устройству является устройство выравнивания платформы подъемных механизмов [RU 2483018, B66C 23/88, от 27.05.2013 г., Бюл. №15]. Данное устройство содержит: передвижное шасси, опорную платформу, выносные опорные гидравлические цилиндры, гидроприводы, панель управления подъемом и опусканием штоков выносных гидравлических цилиндров, датчики контакта штоков гидравлических цилиндров с опорной поверхностью, датчик уровня горизонтального положения, который состоит из корпуса, жестко закрепленного на опорной платформе перпендикулярно ее плоскости, в верхней части которого внутри по периферии расположены четыре коммутационных контакта, сориентированных по углам периметра опорной платформы, шаровой опоры с конусом, имеющим центр масс на оси конуса у основания фиксирующей пружины.
Недостаток данного устройства заключается в наличии конуса с шаровой опорой. В процессе работы из-за вибрации и толчков возможно несанкционированное срабатывание датчика, а наличие механического узла трения между фиксирующей пружиной и шаровой опорой конуса ведет к ее износу, что значительно снижает точность выравнивания опорной платформы грузоподъемных механизмов.
Технический результат, достигаемый предлагаемым устройством, заключается в автоматическом выравнивании в горизонтальной плоскости опорной платформы, сокращении времени, повышении точности выравнивания и уровня безопасности.
Предлагаемое устройство автоматического выравнивания платформ аэродромных грузоподъемных механизмов содержит: передвижное шасси, опорную платформу, датчик выравнивания опорной платформы в горизонтальное положение, гидроприводы, датчик контакта штоков гидравлических цилиндров с опорной поверхностью, блок управления, панель управления подъемом и опусканием штоков выносных гидравлических цилиндров, выносные гидравлические цилиндры.
Датчик выравнивания опорной платформы в горизонтальное положение состоит из корпуса, выполненного из диэлектрического материала, имеющего в основании демпфирующее устройство, внутри которого размещены следующие элементы: маятник, шаровая опора, с помощью которой маятник крепится к крышке корпуса, коммутационные контакты, один из которых - основной выполнен в виде кольца, четыре периферийных, представляющих собой четыре равные части кольца, размеры которого равны размеру кольца основного коммутационного контакта.
Общими признаками прототипа и заявляемого устройства являются передвижное шасси, опорная платформа, выносные опорные гидравлические цилиндры, панель управления подъемом и опусканием штоков выносных гидравлических цилиндров, датчики контакта штоков гидравлических цилиндров с опорной поверхностью.
Отличительным признаком прототипа от заявляемого устройства является конструкция датчика выравнивания опорной платформы в горизонтальное положение, который состоит из следующих элементов: корпуса, закрепленного на опорной платформе через демпфирующее устройство, герметично закрытого крышкой, маятника, закрепленного в крышке и имеющего центр тяжести в нижней части, коммутационных контактов: основной, выполненный в форме кольца и размещенный на маятнике, четыре периферийных контакта, сориентированных в направлении выносных гидравлических цилиндров, представляющих собой четыре равных сектора кольца, размеры которого равны размерам основного коммутационного контакта, и размещенных на крышке. Пространство внутри корпуса заполнено инертным газом, позволяющим улучшить протекание коммутационных процессов, что тем самым предотвращает подгорание и залипание коммутационных контактов. Смещение центра тяжести маятника в его нижнюю часть сокращает время возвращения маятника в вертикальное положение, что улучшает точность и сокращает время подачи команды в блок управления. Демпферное устройство позволяет уменьшить влияние колебаний опорной платформы и предотвратить ложное срабатывание датчика выравнивания опорной платформы в горизонтальное положение.
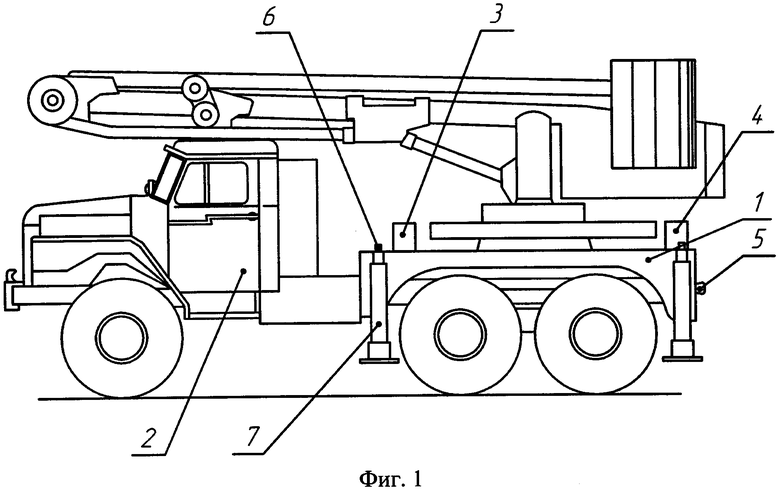
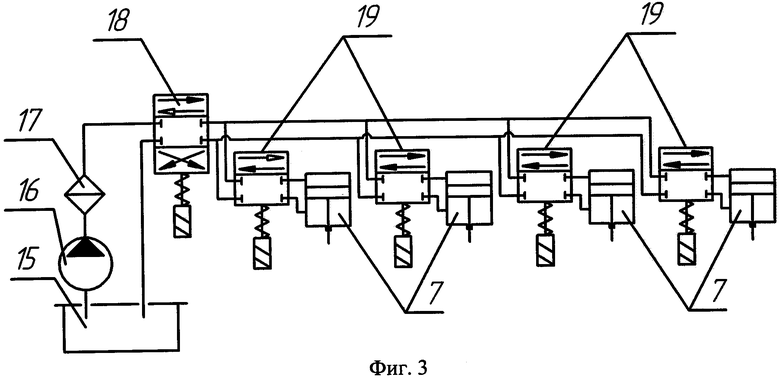
Заявляемое устройство изображено: на фиг. 1 - вид сбоку; на фиг. 2 - датчик выравнивания опорной платформы в горизонтальное положение; на фиг. 3 - принципиальная гидравлическая схема.
На фиг. 1 изображено устройство автоматического выравнивания аэродромных платформ грузоподъемных механизмов, включающее следующие элементы: опорную платформу 1, передвижное шасси 2, датчик выравнивания опорной платформы в горизонтальное положение 3, блок управления 4, панель управления подъемом и опусканием штоков выносных гидравлических цилиндров 5, датчик контакта штоков гидравлического цилиндра с опорной поверхностью 6, выносной гидравлический цилиндр 7.
На фиг. 2 изображен датчик выравнивания опорной платформы в горизонтальное положение, включающий следующие элементы: демпферное устройство 8, корпус 9, шаровую опору 10, маятник 11, основной коммутационный контакт 12, четыре периферийных коммутационных контакта 13, крышку 14.
На фиг. 3 изображена принципиальная гидравлическая схема устройства выравнивания опорной поверхности грузоподъемных механизмов, включающая следующие элементы: выносные гидравлические цилиндры 7, гидравлический бак 15, насос 16, фильтр 17, трехпозиционный электромагнитный клапан 18, двухпозиционный электромагнитный клапан 19.
Устройство работает следующим образом. Перед началом работы оператор на панели управления подъемом и опусканием штоков выносных гидравлических цилиндров 5 переводит тумблер в положение опускания штоков выносных гидравлических цилиндров 7, которое происходит до их контакта с опорной поверхностью. После срабатывания датчиков контакта с опорной поверхностью 6 сигнал подается в блок управления 4 на включение автоматического выравнивания платформы. Осуществление выравнивания происходит по сигналу с датчика выравнивания опорной платформы в горизонтальное положение 3. Маятник 11 под действием силы тяжести стремится к вертикальному положению. В этом положении коммутационные контакты разомкнуты и опорная платформа находится в горизонтальном положении. При отклонении опорной платформы от горизонтального положения корпус датчика с расположенными на нем периферийными контактами 13 меняет свое положение. Результатом этого является замыкание основного 12 и периферийного 13 коммутационных контактов, что является командой для выдвижения соответствующего выносного гидравлического цилиндра 7. Размыкание коммутационных контактов 12, 13 является командой для прекращения выдвижения выносного гидравлического цилиндра, что возможно при достижении горизонтального положения опорной платформы грузоподъемного механизма.
Изготовление устройства возможно из узлов и агрегатов, выпускаемых промышленностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВЫРАВНИВАНИЯ АЭРОДРОМНОГО ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 2014 |
|
RU2602884C2 |
| УСТРОЙСТВО ДЛЯ ВЫРАВНИВАНИЯ ПЛАТФОРМ АЭРОДРОМНЫХ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2014 |
|
RU2565854C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2014 |
|
RU2556136C1 |
| УСТРОЙСТВО ВЫРАВНИВАНИЯ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2011 |
|
RU2483018C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ОПОРНОЙ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2006 |
|
RU2307784C1 |
| КРЕНОВО-ТАНГАЖНОЕ ОТВЕСНОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ОПОРНОЙ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2007 |
|
RU2340543C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ОПОРНОЙ ПЛАТФОРМЫ | 2007 |
|
RU2342310C1 |
| Гидросистема механизма выравнивания опорно-поворотного устройства гидроманипулятора лесотранспортной машины | 2021 |
|
RU2762905C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| Способ подъема груза | 2019 |
|
RU2703097C1 |
Изобретение относится к области применения средств механизации на аэродроме. Устройство автоматического выравнивания платформ аэродромных грузоподъемных механизмов содержит передвижное шасси, опорную платформу, датчик выравнивания опорной платформы в горизонтальное положение, гидроприводы, датчик контакта штоков гидравлических цилиндров с опорной поверхностью, блок управления, панель управления подъемом и опусканием штоков выносных гидравлических цилиндров, выносные гидравлические цилиндры. Датчик выравнивания опорной платформы в горизонтальное положение состоит из корпуса, выполненного из диэлектрического материала, имеющего в основании демпфирующее устройство, внутри которого размещены следующие элементы: маятник, шаровая опора, с помощью которой маятник крепится к крышке корпуса, коммутационные контакты, один из которых - основной выполнен в виде кольца, четыре периферийных, представляющих собой четыре равные части кольца, размеры которого равны размеру кольца основного коммутационного контакта. Достигается автоматическое выравнивание в горизонтальной плоскости опорной платформы, сокращение времени, повышение точности выравнивания и уровня безопасности. 3 ил.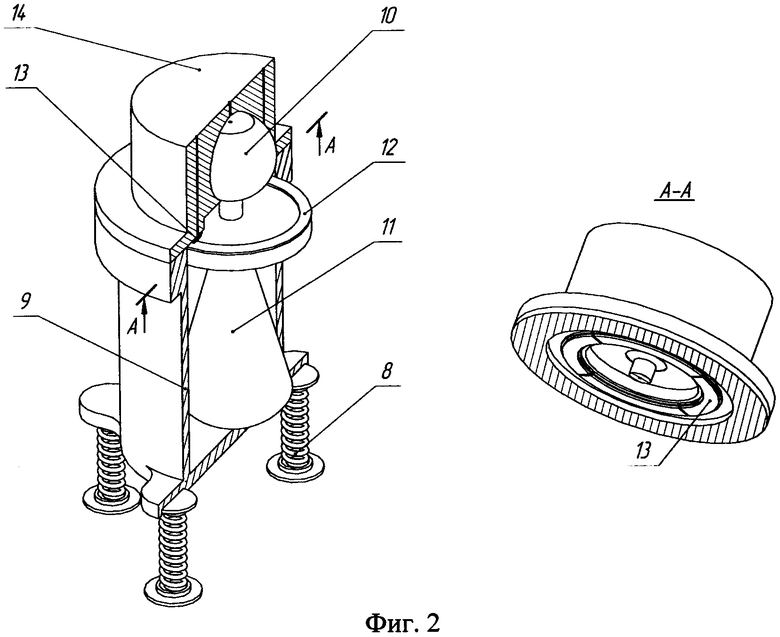
Устройство для автоматического выравнивания платформ аэродромных грузоподъемных механизмов, состоящее из опорной платформы, передвижного шасси, датчиков контакта штоков гидравлических цилиндров с опорной поверхностью, блока управления, панели управления подъемом и опусканием штоков выносных гидравлических цилиндров, выносных гидравлических цилиндров, датчика выравнивания опорной платформы в горизонтальное положение, отличающееся тем, что датчик выравнивания опорной платформы в горизонтальное положение состоит из герметичного корпуса, заполненного инертным газом и установленного на опорной платформе посредством демпфирующего устройства, при этом внутри датчика размещен маятник со смещенным в нижнюю часть центром тяжести, в верхней части которого находится основной кольцевидный коммутационный контакт, а в крышке датчика установлено четыре периферийных контакта, сориентированных в направлении выносных гидравлических цилиндров, представляющих собой секторы кольца, размеры которого равны основному кольцевидному коммутационному контакту.
| УСТРОЙСТВО ВЫРАВНИВАНИЯ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2011 |
|
RU2483018C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ОПОРНОЙ ПЛАТФОРМЫ | 2007 |
|
RU2342310C1 |
| Устройство для горизонтирования самоходной платформы подъемного механизма | 1976 |
|
SU690452A1 |
| DE 19525673 C1, 02.10.1996. | |||

