Изобретение относится к области машиностроения и может быть использовано при конструировании подъемно-транспортных машин.
Известно устройство для обеспечения горизонтального положения опорной платформы подъемно-транспортных машин, содержащее опорную платформу, гидравлическое оборудование с насосом создания давления, выносные силовые цилиндры, расположенные по углам периметра опорной платформы, и золотниковый кран управления работой силовых цилиндров [Кран автомобильный войсковой КС-3572. Техническое описание и инструкция по эксплуатации. - М.: Воениздат МО СССР, 1980].
Данное устройство не позволяет автоматически производить выравнивание в горизонтальной плоскости положения опорной платформы и требует значительного времени для приведения подъемно-транспортной машины в рабочее положение.
Известно другое устройство, представляющее собой подъемник-выравниватель. Данное устройство содержит: поворотный круг; четыре выносных гидравлических цилиндра (по два на каждой из сторон - спереди и сзади) и устройство управления. В состав поворотного круга входят два сопрягаемых кольца клиновидного сечения, расположенных между поворотным основанием шасси автомобиля. Путем поворота колец обеспечивается поворотный угол наклона верхней поворотной части относительно горизонтальной плоскости, то есть коррекция угла наклона. Устройство управления одновременно с коррекцией наклона обеспечивает выдвижение аутригеров (выносных гидравлических цилиндров) и после вывешивания машины, измеряя угловое положение с помощью датчиков, вновь корректирует его посредством аутригеров [Журнал «Строительные дорожные машины» №5 - М.: ВНИИПИ, 1998 г., с.44, или исм. М.: ВНИИПИ, 1997, №6 вып.036. МПКВ 66].
Рассмотренное выше устройство недостаточно эффективно из-за необходимости корректировки горизонтальной плоскости опорной платформы.
Наиболее близким к заявляемому устройству является креново-тангажное отвесное устройство автоматического выравнивания опорной платформы подъемных механизмов [RU 2340543, В66С 5/00, В66С 23/78, 10.12.2008 г., Бюл. №34]. Данное устройство содержит: креново-тангажное отвесное устройство автоматического выравнивания опорной платформы подъемных механизмов, включающее передвижное шасси, опорную платформу, поворотную кабину, выносные опорные гидравлические цилиндры, панель управления подъемом и опусканием штоков выносных гидравлических цилиндров, датчики контакта штоков гидравлических цилиндров с опорной поверхностью, датчик уровня горизонтального положения (креново-тангажных отвесных датчиков), блок управления, выполненный в виде усилителя сигналов датчиков уровня горизонтального положения (с креново-тангажных отвесных датчиков) с реостатными направляющими, сориентированными в продольной и поперечной плоскостях.
Недостаток данного устройство заключается в наличии реостатной обмотки и подвижного щеточного контактного узла, снижающего надежность устройства, так как в процессе работы возможно подгорание контактов и их залипание, что негативно влияет на точность выравнивания опорной платформы подъемно-транспортной машины.
Технический результат, достигаемый предлагаемым устройством, заключается в повышении точности выравнивания.
Предлагаемое устройство выравнивания платформы подъемных механизмов содержит: передвижное шасси, опорную платформу, датчик уровня горизонтального положения, гидропроводы, панель управления подъемов и опусканием штоков выносных гидравлических цилиндров, при этом датчик уровня горизонтального положения состоит из корпуса, в верхней части которого по периферии расположены четыре коммутационных контакта, сориентированные по углам периметра опорной платформы, шаровой опорой с конусом, имеющим центр масс на оси конуса у основания, фиксирующей пружины.
Общим признаком прототипа и заявляемого устройства является: опорная платформа, передвижное шасси, выносные опорные гидравлические цилиндры, устройство управления, датчики контакта штоков гидравлических цилиндров с опорной поверхностью, блок управления, датчик уровня горизонтального положения.
Отличительными признаками являются: наличие датчика уровня горизонтального положения, расположенного для увеличения точности регулирования по центру опорной платформы, представляющего собой: корпус, жестко закрепленный на опорной платформе перпендикулярно ее плоскости, в верхней части которого внутри по периферии расположены четыре коммутационных контакта, сориентированные по углам периметра опорной платформы, шаровую опору с конусом, имеющим центр масс на оси конуса у основания, фиксирующую пружину.
Управление устройством выравнивания платформы подъемных механизмов осуществляется с пульта управления трехпозиционным тумблером, управляющим трехпозиционным электромагнитным клапаном.
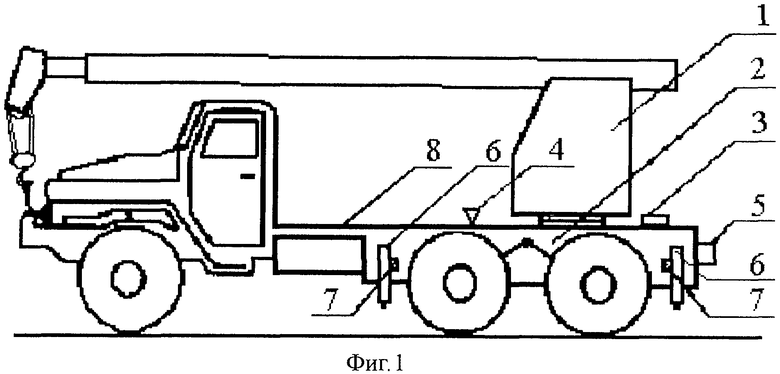
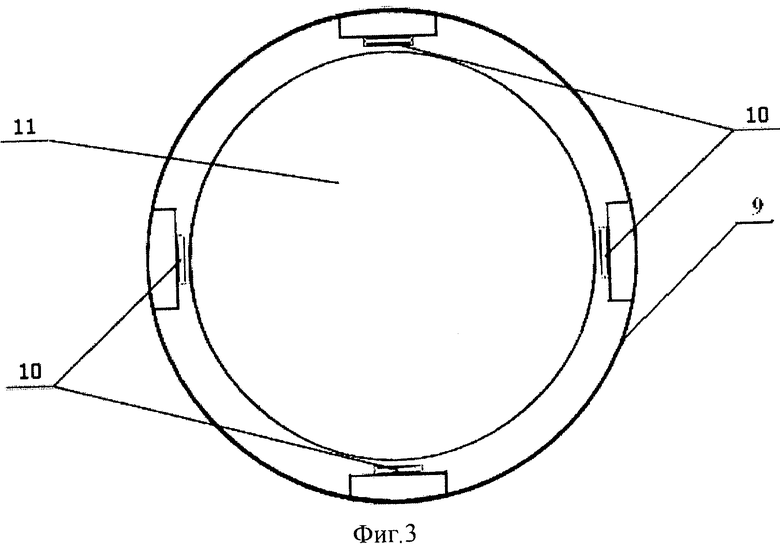
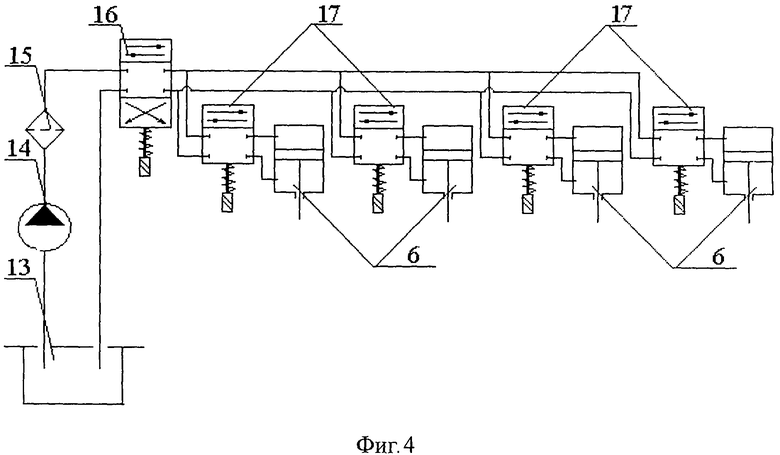
Заявляемое устройство изображено: на Фиг.1 - вид сбоку, на Фиг.2 - датчик уровня горизонтального положения; на Фиг.3 - вид сверху датчика уровня горизонтального положения; на Фиг 4 - принципиальная гидравлическая схема.
На Фиг.1 изображено устройство выравнивания платформы подъемных механизмов, включающее следующие элементы: поворотную кабину 1, передвижное шасси 2, блок управления 3, датчик уровня горизонтального положения 4, панель управления 5, выносные гидравлические цилиндры 6, датчики контакта штоков гидравлических цилиндров с опорной поверхностью 7, опорную платформу 8.
На Фиг.2 изображен датчик уровня горизонтального положения, включающий следующие элементы: корпус 9, жестко закрепленный на опорной платформе 8, коммутационные контакты 10, шаровую опору с конусом 11, фиксирующую пружину 12.
На Фиг.3 изображен датчик уровня горизонтального положения, включающий следующие элементы: корпус датчика 9, коммутационные контакты 10, шаровую опору с конусом 11.
На Фиг.4 изображена принципиальная гидравлическая схема устройства выравнивания платформы подъемных механизмов, включающая следующие элементы: выносные гидравлические цилиндры 6, гидравлический бак 13, насос 14, фильтр 15, трехпозиционный электромагнитный клапан 16, двухпозиционный электромагнитный клапан 17.
Устройство работает следующим образом. Перед началом работы оператор на пульте управления переводит тумблер в положение опускания штоков выносных гидравлических цилиндров, которое происходит до их контакта с опорной поверхностью. После срабатывания датчиков контакта с опорной поверхностью сигнал подается в блок управления на включение автоматического выравнивания платформы. Осуществление выравнивания происходит по сигналу с датчика уровня горизонтального положения платформы, в зависимости от включенных коммутационных контактов.
Изготовление устройства выравнивания платформы подъемных механизмов проводится из узлов и агрегатов, серийно выпускаемых промышленностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРЕНОВО-ТАНГАЖНОЕ ОТВЕСНОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ОПОРНОЙ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2007 |
|
RU2340543C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2014 |
|
RU2556136C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ПЛАТФОРМ АЭРОДРОМНЫХ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2014 |
|
RU2582563C2 |
| УСТРОЙСТВО ДЛЯ ВЫРАВНИВАНИЯ ПЛАТФОРМ АЭРОДРОМНЫХ ГРУЗОПОДЪЕМНЫХ МЕХАНИЗМОВ | 2014 |
|
RU2565854C1 |
| УСТРОЙСТВО ВЫРАВНИВАНИЯ АЭРОДРОМНОГО ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА | 2014 |
|
RU2602884C2 |
| Гидросистема механизма выравнивания опорно-поворотного устройства гидроманипулятора лесотранспортной машины | 2021 |
|
RU2762905C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ОПОРНОЙ ПЛАТФОРМЫ | 2007 |
|
RU2342310C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ОПОРНОЙ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2006 |
|
RU2307784C1 |
| МОБИЛЬНАЯ ВЫШКА ПРЕИМУЩЕСТВЕННО ДЛЯ АНТЕННЫХ СИСТЕМ | 2011 |
|
RU2469445C1 |
| Мобильный роботизированный комплекс фонтанирующих скважин МРК-ФС | 2019 |
|
RU2718550C1 |
Изобретение относится к области машиностроения, и может быть использовано при конструировании подъемно-транспортных машин. Устройство выравнивания платформы подъемных механизмов содержит передвижное шасси, опорную платформу, датчики уровня горизонтального положения, гидроприводы, панель управления подъемов и опускания штоков выносных гидравлических цилиндров. Датчик уровня горизонтального положения состоит из корпуса, в верхней части которого по периферии расположены четыре коммутационных контакта, сориентированные по углам периметра опорной платформы, шаровой опорой с конусом, имеющим центр масс на оси конуса у основания, фиксирующей пружины. Достигается повышение точности выравнивания. 4 ил.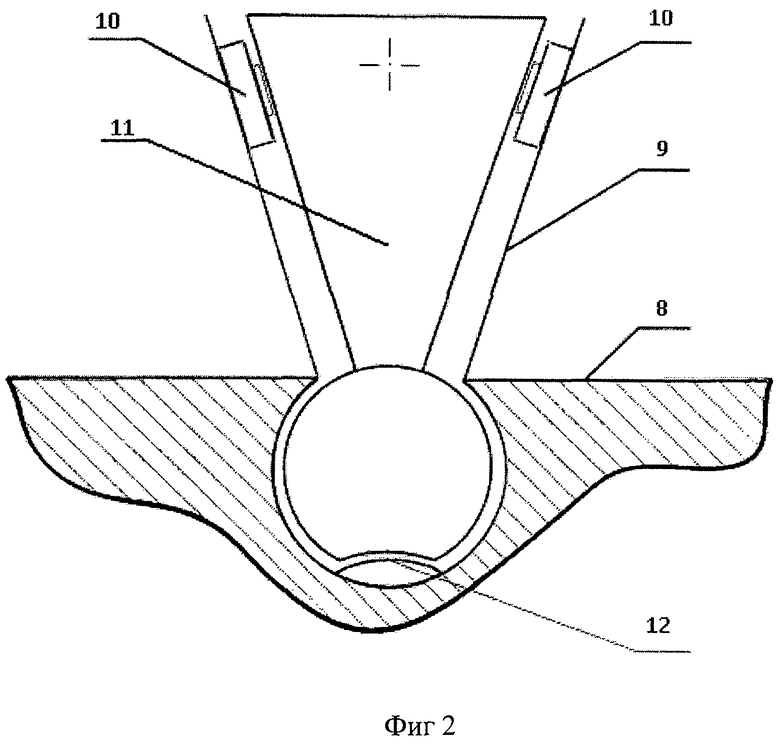
Устройство выравнивания платформы подъемных механизмов, содержащее опорную платформу, передвижное шасси, выносные опорные гидравлические цилиндры, устройство управления, датчики контакта штоков гидравлических цилиндров с опорной поверхностью, блок управления, датчик уровня горизонтального положения, отличающееся тем, что датчик уровня горизонтального положения расположен по центру опорной платформы и состоит из корпуса, жестко закрепленного на опорной платформе перпендикулярно ее плоскости, в верхней части которого внутри по периферии расположены четыре коммутационных контакта, сориентированные по углам периметра опорной платформы, шаровой опоры с конусом, имеющим центр масс на оси конуса у основания, фиксирующей пружины.
| КРЕНОВО-ТАНГАЖНОЕ ОТВЕСНОЕ УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ ОПОРНОЙ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2007 |
|
RU2340543C1 |
| УСТРОЙСТВО ДЛЯ УДЕРЖАНИЯ в ГОРИЗОНТАЛЬНОМ ПОЛОЖЕНИИ ПJ!ATФOPMЫ | 0 |
|
SU189538A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫРАВНИВАНИЯ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ОПОРНОЙ ПЛАТФОРМЫ ПОДЪЕМНЫХ МЕХАНИЗМОВ | 2006 |
|
RU2307784C1 |
| Устройство для горизонтирования самоходной платформы подъемного механизма | 1976 |
|
SU690452A1 |
| DE 19525673 С1, 02.10.1996. | |||

