Изобретение относится к области радиолокации и позволяет получать детальное радиолокационное изображение ограниченных по площади участков земной поверхности в интересах решения народохозяйственных задач.
Мониторинг открытых площадок, в том числе и автомобильных стоянок, в настоящее время, как правило, осуществляется с помощью оптических средств. Главный недостаток данных средств состоит в существенном снижении эффективности их функционирования при ухудшении условий оптической видимости (дождь, снег, вечернее и ночное время суток). Использование для мониторинга открытых автомобильных стоянок радиолокационных систем (РЛС) позволяет обеспечить получение высокодетального их изображения в любое время суток и в любых метеоусловиях (вне зависимости от условий оптической видимости).
Современные РЛС в основным строятся по однопозиционному принципу построения, когда приемник и передатчик РЛС находятся в одной точке пространства, в то же время известны многопозиционные РЛС [Черняк B.C. Многопозиционная радиолокация. - М.: Радио и связь, 1993], которые содержат несколько разнесенных в пространстве передающих, приемных или приемо-передающих позиций и в которых получаемая ими информация о целях обрабатывается совместно.
При формировании радиолокационного изображения (РЛИ) поверхности традиционно используется сканирование по дальности и угловым координатам, которое ведется за счет естественного распространения радиоволн по координате дальности и механического или электронного перемещения главного луча антенны по угловым координатам, при таком способе формировании РЛИ невозможно обеспечить одинаково хорошее разрешение по дальности и азимуту, поскольку линейное разрешение по азимуту зависит от дальности до участка поверхности, в то же время известен принцип прямого синтеза апертуры искусственной антенны [Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. Учебное пособие для вузов / Под ред. Г.С. Кондратенкова. - М.: Радиотехника, 2005], при котором возможно получение высокого линейного разрешения по азимуту, которое обеспечивается путем формирования виртуальной апертуры антенны за счет поступательного движения фазового центра (ФЦ) реальной антенны (ФЦА), установленного на подвижном носителе, с постоянной скоростью по прямолинейной траектории.
Получение высокодетального РЛИ земной поверхности возможно тогда, когда РЛС будет обладать высоким линейным разрешением как по азимуту, так и по шкале дальности. В настоящее время для обеспечения высокого разрешения РЛС по дальности δД=δlХ используют сложные зондирующие сигналы [Бакулев П.А. Радиолокационные системы. Учебник для вузов. - М.: Радиотехника, 2007], а для обеспечения высокого линейного разрешения РЛС по азимуту δlаз=δlХ - режим синтезирования искусственной апертуры [Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. Учебное пособие для вузов / Под ред. Г.С. Кондратенкова. - М.: Радиотехника, 2005]. В то же время при небольших дальностях радиолокационного наблюдения получение высокодетального РЛИ наблюдаемой земной поверхности возможно только за счет процедуры синтезирования искусственной апертуры антенны [Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. Учебное пособие для вузов / Под ред. Г.С. Кондратенкова. - М.: Радиотехника, 2005]. Традиционно, при использовании процедуры синтезирования апертуры обычно полагают, что фазовый центр (ФЦ) реальной антенны РЛС, установленный на подвижном носителе, перемещается по прямолинейной траектории со скоростью носителя, радиолокатор облучает поверхность земли и обеспечивается когерентная обработка принимаемого сигнала, отраженного от наблюдаемой поверхности [Бакулев П.А. Радиолокационные системы Учебник для вузов. - М.: Радиотехника, 2007]. При этом для обеспечения процесса синтеза главный луч (ГЛ) реальной антенны должен быть отклонен относительно линии пути носителя в пределах ±(10…90) градусов (фиг. 1). Радиолокатор, установленный на носителе, может работать как в непрерывном, так и импульсном режимах излучения. В результате данного способа синтезирования обеспечивается линейная разрешающая способность по азимуту, равная [Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. Учебное пособие для вузов / Под ред. Г.С. Кондратенкова. - М.: Радиотехника, 2005]
 Х Д
Х Д
где λ - длина волны зондирующих колебаний РЛС; Д - дальность до объекта зондирования; Vc - скорость подвижного носителя; Тн - время обработки отраженного сигнала (время синтезирования); φа - угол установки ГЛ диаграмм направленности (ДН) реальной антенны относительно линии пути в плоскости азимута. При этом за счет синтеза искусственной апертуры в плоскости угла места на малых дальностях также обеспечивается высокое линейное разрешение, однако оно будет хуже, чем в плоскости азимута, определяемое выражением (1).
В [Кондратенков Г.С., Фролов А.Ю. Радиовидение. Радиолокационные системы дистанционного зондирования Земли. Учебное пособие для вузов / Под ред. Г.С. Кондратенкова. - М.: Радиотехника, 2005] также утверждается, что при полете носителя вокруг наблюдаемого объекта по круговой траектории за счет синтеза апертуры искусственной антенны обеспечивается линейное разрешение, равное 0,18λ.
Получение высокодетального РЛИ возможно также за счет процедуры синтеза искусственной апертуры при механическом вращении ФЦ реальной антенны вокруг центра масс носителя [Татарский Б.Г., Ясенцев Д.А. Анализ особенностей формирования и обработки траекторного сигнала в РЛС с синтезированием апертуры антенны при вращении ее фазового центра // Информационно-измерительные и управляющие системы. - М.: Радиотехника, 2008, №9]. В этом случае ФЦ реальной антенны перемещается по круговой траектории с постоянной скоростью и обеспечивается когерентная обработка принимаемого сигнала в течение времени наблюдения Тн, равного периоду вращения. Радиолокатор, осуществляющий процесс синтеза искусственной апертуры данным способом, может работать как в непрерывном, так и в импульсном режимах излучения. В результате данного способа синтеза апертуры обеспечивается линейная разрешающая способность по азимуту, равная [[Татарский Б.Г., Ясенцев Д.А. Анализ особенностей формирования и обработки траекторного сигнала в РЛС с синтезированием апертуры антенны при вращении ее фазового центра // Информационно-измерительные и управляющие системы, 2008, Т. 6, №9]
 ,
,
где R - радиус вращающей структуры; Д - дальность до объекта наблюдения.
При малой дальности до объекта наблюдения (поверхности земли) синтезирование искусственной апертуры возможно и в плоскости угла места. При этом линейная разрешающая способность РЛС в плоскости угла места будет определяться следующим выражением [Татарский Б.Г., Ясенцев Д.А. Особенности синтезирования апертуры при вращении фазового центра антенны в режиме обзора «под собой» // Информационно-измерительные и управляющие системы, 2009, Т. 7, №1]

где ψ - угол визирования объекта наблюдения; H - высота расположения центра масс носителя.
Из уровня техники известно также изобретение «Наземная обзорная радиолокационная станция аэропорта и радиолокационная установка» по патенту №2115141, МПК G01S 13/91, публ. 10.07.1998 г. (прототип).
Изобретение основывается на радиолокационной станции для зоны поверхности земли, в частности зоны аэропорта, предназначенной для размещения в соответствии с предварительно выполненной геометрической увязкой с данной контролируемой зоной, в то же время формирование РЛИ участка земной поверхности в при обзоре ведется без учета принципа синтезирования искусственной апертуры и, следовательно, сохраняется зависимости линейного разрешения по азимуту от дальности.
К недостаткам известных способов относятся их трудоемкость и высокая стоимость.
Заявленный технический результат от использования предложенного технического решения может быть выражен в упрощении возможности получения высокодетального изображения ограниченного по площади участка земной поверхности и снижении затрат на его получение
Радиолокационная система, которая бы в полной мере сочетала в себе как особенности построения, так и принцип функционирования, необходимые для реализации радиолокационной системы мониторинга открытых автомобильных стоянок и определения свободных парковочных мест, в настоящий момент отсутствует.
Указанный технический результат достигается следующим образом.
Радиолокационная система мониторинга открытых автомобильных стоянок и определения свободных парковочных мест содержит по меньшей мере четыре приемо-передающих модуля, расположенных вокруг наблюдаемой стоянки. Каждый модуль включает в свой состав антенную систему, обеспечивающую преобразование поступившего на ее вход зондирующего сигнала в электромагнитную волну и преобразование отраженного колебания от поверхности автостоянки в выходной высокочастотный сигнал. Главный луч диаграммы направленности антенны направлен в центр автостоянки. Ширина луча диаграммы направленности каждой антенны обеспечивает одновременное покрытие всей площади автостоянки. Передающий и приемные тракты обеспечивают, соответственно, формирование зондирующего сигнала и предварительную обработку принимаемого сигнала. Элементы синхронизации и управления обеспечивают функционирование распределенной радиолокационной системы. Последовательное по времени и очереди включение каждого отдельного приемо-передающего модуля в режим излучения зондирующего сигнала и приема отраженного сигнала от поверхности отрытой стоянки в течение времени Тп обеспечивает электронное перемещение фазового центра реальной антенны по траектории в виде окружности. Совместная когерентная обработка выходных откликов каждого модуля в единой системе обработки реализует принцип синтезирования искусственной апертуры антенны, обеспечивая получение детального радиолокационного изображения открытой стоянки автомобилей. Определение свободных парковочных мест выполняется путем сравнения текущего радиолокационного изображения открытой стоянки автомобилей и сетки парковочных мест, построенной с использованием пассивных радиолокационных маркеров (отражателей), установленных на поверхности полотна автостоянки в характерных точках, определяющих конфигурацию сетки парковочных мест и открытой автомобильной стоянки в целом.
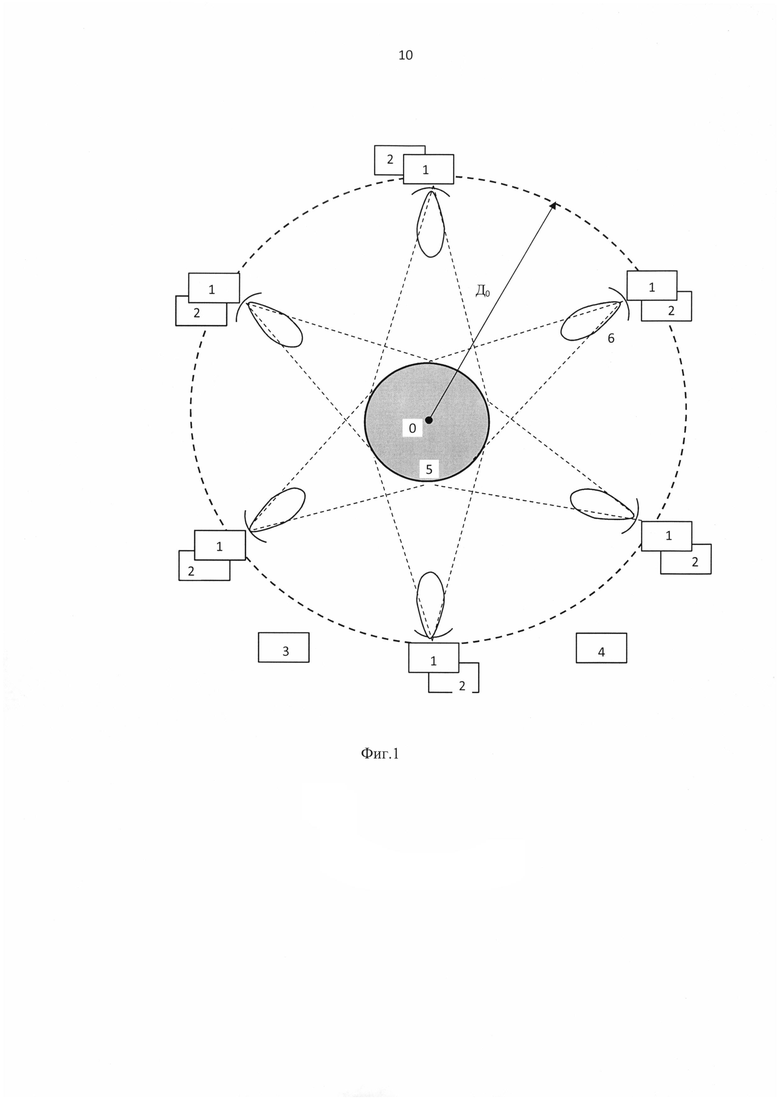
Сущность изобретения состоит в структуре построения и функционировании РЛС мониторинга открытых автомобильных стоянок и определения свободных мест для стоянок автомобилей. В основу функционирования системы положен способ получения детального радиолокационного изображения (РЛИ) ограниченных участков земной поверхности, который предполагает наличие распределенных в пространстве приемо-передающих (ПРМ-ПРД) элементов, размещаемых вокруг участка местности, представляющего интерес, образующих единую систему и работающих последовательно в течение времени, достаточного для облучения участка местности и приема отраженного от него сигнала, при когерентном сложении откликов, получаемых каждым элементом, в единой для распределенной совокупности ПРМ-ПРД элементов системе обработки при ориентации главного луча (ГЛ) диаграммы направленности (ДН) антенны (ДНА) каждого элемента в направлении на облучаемую площадку и электронном переключении ПРМ-ПРД элементов, имитирующем движение ФЦ реальной антенны (ФЦА) по окружности вокруг ограниченного участка местности с угловой скоростью Ωск.. В соответствии с описанным способом структура построения РЛС мониторинга открытых автомобильных стоянок и определения свободных мест для стоянок автомобилей включает совокупность ПРМ-ПРД модулей, располагаемых по окружности вокруг открытой автомобильной стоянки, общую для всех модулей систему когерентной обработки выходных откликов, формируемых отдельными модулями, и единую систему управления и синхронизации (фиг. 1). Система управления и синхронизации (СУС) является управляющим ядром данной распределенной РЛС мониторинга. Ее элементы располагаются как совместно с ПРМ-ПРД модулями, так и отдельно. В состав СУС могут включаться каналы для передачи сигналов управления, синхронизации и выходных откликов ПРМ-ПРД модулей. Каждый ПРМ-ПРД модуль имеет антенну, главный луч (ГЛ) ДН которой направляется на открытую автомобильную стоянку, а ширина его луча обеспечивает одновременный просмотр всей стоянки при ее зондировании без сканирования. Путем последовательного электронного переключения ПРМ-ПРД модулей обеспечивается эффект движения ФЦ реальной антенны по окружности, а когерентная обработка выходных откликов каждого модуля в общей системе когерентной обработки позволяет сформировать детальное РЛИ открытой автомобильной стоянки, соответствующее текущей ситуации на автостоянке, качество которого не зависит от времени суток и погодных условий. Детальность РЛИ определяется линейными размерами элемента разложения данного изображения (показателями линейного разрешения распределенной РЛС мониторинга по азимуту и углу места (дальности)) и выбирается с учетом размера типового из наблюдаемой совокупности автомобилей (фиг. 2). Сформированное РЛИ используется затем в единой системе обработки (СО) для определения свободных мест для парковки автомобилей. Для этого сформированное РЛИ сравнивается с опорным изображением (ОИ), представляющим собой разметку парковочных мест автомобильной стоянки, которое формируется заранее и хранится в памяти СО. Для привязки ОИ к сформированному РЛИ автостоянки используются радиолокационные маркеры (отражатели), которые устанавливаются в узловых точках ее разметки и позволяют также оценить реальное расположение автомобиля на стоянке относительной линий разметки парковки даже в условиях отсутствия оптической видимости линий разметки. Маркеры могут быть также использованы для создания ОИ парковочных мест при настройке системы мониторинга открытой автомобильной стоянки. Характерные размеры радиолокационного маркера h и d (фиг. 3) выбираются с учетом обеспечения необходимой мощности отраженного сигнала от него для устойчивого наблюдения отражателей на РЛИ автомобильной стоянки. Сравнение ОИ и текущего РЛИ обеспечивает выявление единой системой обработки свободных парковочных мест, информация о которых затем предоставляется в виде, удобном для потребителя.
На Фиг. 1 представлена структура построения распределенной РЛС мониторинга, обеспечивающей получение высокодетального РЛИ открытой стоянки автомобилей на основе принципа синтезирования апертуры искусственной антенны за счет электронного перемещения ФЦА по круговой траектории и когерентной обработки выходных откликов каждого ПРМ-ПРД модуля в единой системе обработки. Показано: расположение ПРМ-ПРД модулей (1) вокруг открытой стоянки автомобилей на удалении Д0 со встроенными элементами системы управления и синхронизации (2), обеспечивающими когерентность работы распределенной РЛС; положение ГЛ ДНА (6) отдельного ПРМ-ПРД модуля шириной θa; расположение открытой автомобильной стоянки (5) относительно совокупности ПРМ-ПРД модулей с центром в точке 0; единая СО (4), обеспечивающая когерентную обработку выходных откликов ПРМ-ПРД модулей, входящих в распределенную РЛС мониторинга и определение свободных мест парковки автомобилей; система управления и синхронизации (СУС) (3), обеспечивающая электронное перемещение ФЦА за счет последовательного электронного переключения (включения и выключения) каждого отдельного ПРМ-ПРД модуля в течение периода времени Tn, необходимого для облучения (зондирования) открытой стоянки автомобилей и приема отраженного от стоянки сигнала, а также когерентность процесса обработки выходных откликов ПРМ-ПРД модулей в единой системе обработки.
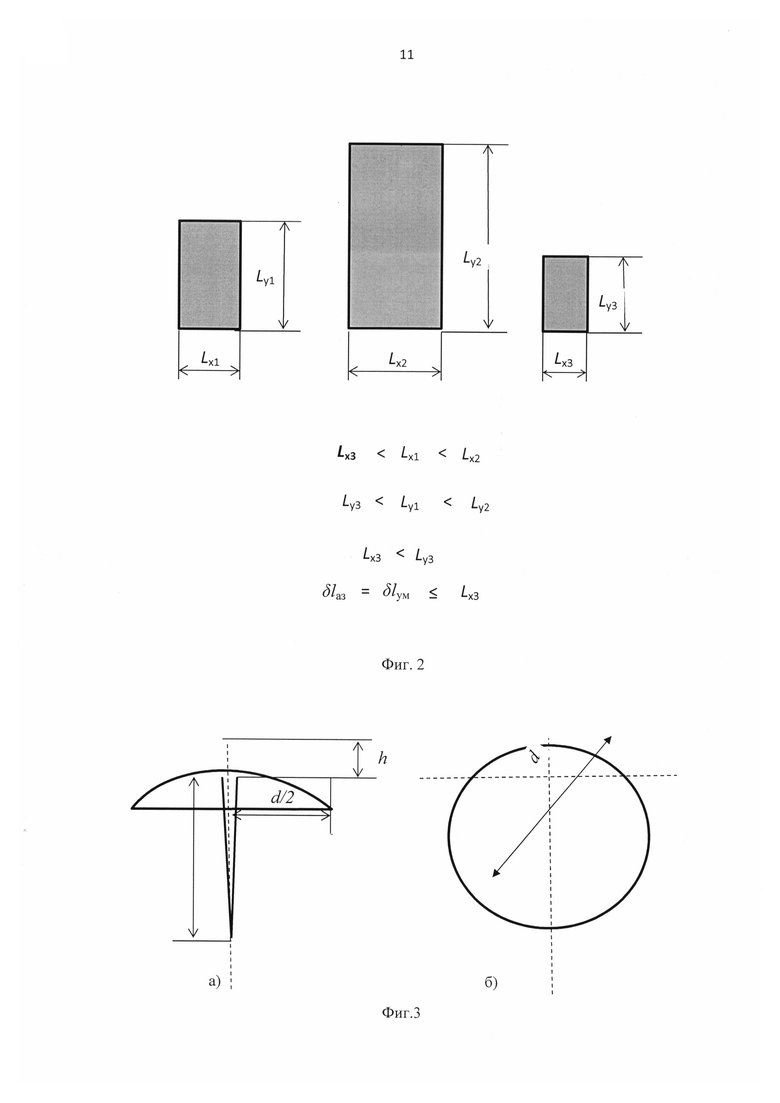
На Фиг. 2 приведены в качестве примера условные изображения трех автомобилей с указанием их размеров в картинной плоскости: lx1, lx2, lx3 - ширина автомобиля; ly1, ly2, ly3 - длина автомобиля, а также приведены соотношения размеров данных автомобилей и порядок выбора линейной разрешающей способности распределенной РЛС мониторинга по угловым координатам для обеспечения получения детального РЛИ открытой автомобильной стоянки.
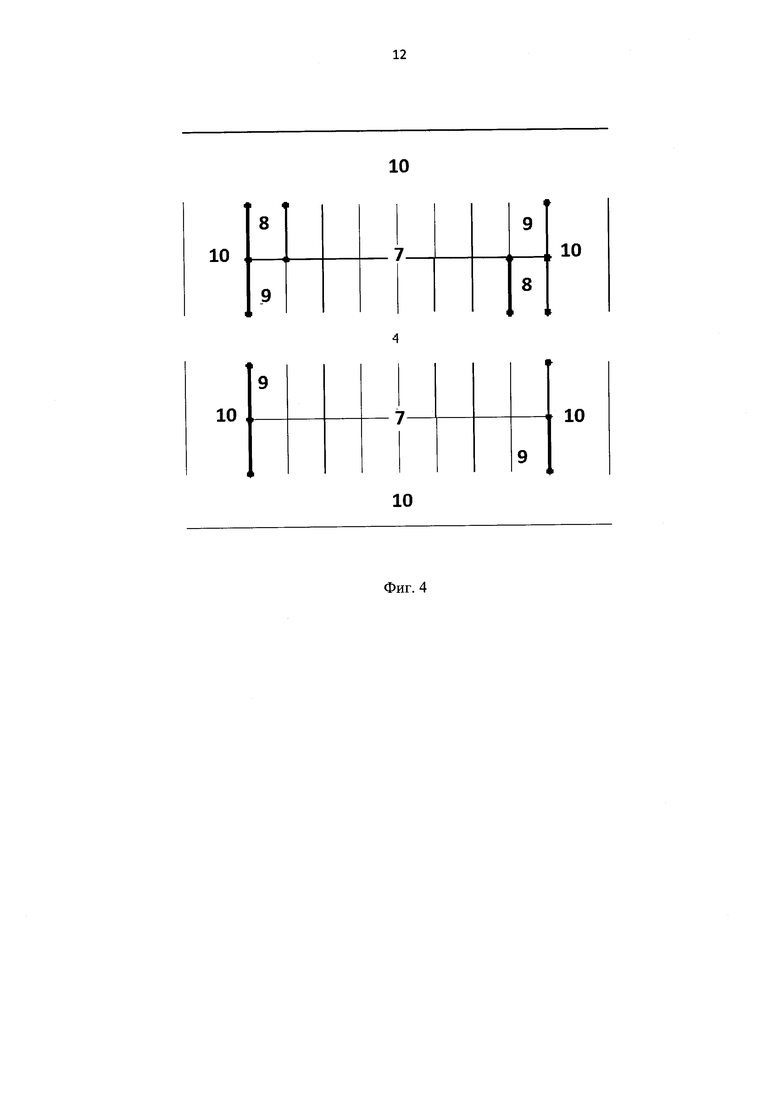
На Фиг. 3 приведено схематическое изображение радиолокационного маркера (отражателя), который используется для маркировки линий разметки парковочных мест для автомобилей. На изображении а) приведен его вид в вертикальной плоскости, а на изображении б) - в горизонтальной плоскости. Конструкция маркера имеет форму «грибка», имеющего тонкую ножку (b) и шляпку с характерными размерами d (диаметр шляпки) и h (высота шляпки). Выбор характерных размеров d и h обеспечивает уровень отраженного сигнала от маркера, достаточный для устойчивого его наблюдения на РЛИ открытой стоянки автомобилей. Высота ножки b должна выбираться с учетом надежного крепления шляпки маркера на поверхности покрытия открытой стоянки автомобилей. Для получения устойчивого отраженного сигнала от маркера его конструкция должна быть выполнена из металла, а для защиты от коррозии вследствие воздействия дождя, снега и реагентов шляпка маркера должна быть выполнена из нержавеющей стали.
На Фиг. 4 приведен фрагмент разметки парковочных мест автомобилей на открытой стоянке и представлен вариант расположения на ее поверхности радиолокационных маркеров (отражателей).
7 - сетка разметки парковочных мест автомобилей на открытой стоянке;
8 - маркировка отдельного парковочного места для автомобиля с помощью пассивных радиолокационных маркеров;
9 - маркировка совокупности парковочных мест на открытой стоянке автомобилей с помощью пассивных радиолокационных маркеров;
10 - подъездные дороги к местам стоянки автомобилей на открытой стоянке
Показано: участок открытой стоянки автомобилей с вариантом разметки парковочных мест в виде сетки из горизонтальных и вертикальных линий (7); расположение радиолокационных маркеров (отражателей) на поверхности участка открытой автомобильной стоянки, которые маркируют положение отдельного парковочного места для автомобиля (8); расположение радиолокационных маркеров (отражателей) на поверхности открытой автомобильной стоянки, маркирующих положение всей сетки парковочных мест (9); подъездные дороги (10) на открытой стоянке автомобилей.
Реализация РЛС мониторинга открытых стоянок автомобилей и определения свободных парковочных мест обеспечивается при распределенном построении системы, включающей совокупность из ПРМ-ПРД модулей, размещенных вокруг открытой автостоянки на одинаковом расстоянии Д0 от ее центра при электронном управлении режимом излучения и приема отраженных сигналов каждым модулем в течение периода времени Tn, достаточного для зондирования открытой стоянки и обработки отраженного от нее сигнала. При этом ГЛ ДНА каждого ПРМ-ПРД модуля направлен в центр открытой автомобильной стоянки и обладает шириной θa, достаточной для мгновенного ее просмотра без сканирования. Последовательное включение в работу каждого отдельно взятого ПРМ-ПРД модуля обеспечивает электронное перемещение ФЦ реальной антенны по траектории в виде окружности со скоростью Ωск, а совместная когерентная обработка выходных откликов каждого модуля в единой СО обеспечивает реализацию принципа синтезирования апертуры искусственной антенны и формирование высокодетального РЛИ открытой стоянки автомобилей. Установка на поверхности открытой стоянки пассивных радиолокационных маркеров (отражателей) в точках, определяющих характерные размеры парковочных мест и геометрию парковки в целом, обеспечивает привязку РЛИ открытой автостоянки к сетке ее парковочных мест и определение свободных мест для парковки вновь прибывающих автомобилей. Выполнение данной процедуры осуществляется в единой СО. Помимо неподвижно стоящих автомобилей с помощью предлагаемой распределенной РЛС мониторинга возможно наблюдение движущихся объектов. Информация о наличии свободных парковочных мест предоставляется в виде, удобном для потребителя.
Изобретение относится к области радиолокации. Система содержит приемо-передающие модули, расположенные вокруг стоянки, включающие антенную систему, обеспечивающую преобразование зондирующего сигнала, ширина луча диаграммы направленности антенн обеспечивает одновременное покрытие всей площади автостоянки; передающий и приемные тракты, выполненные с возможностью формирования зондирующего сигнала и предварительной обработки принимаемого сигнала. В систему включены элементы синхронизации и управления, обеспечивающие функционирование распределенной радиолокационной системы, последовательное по времени и очереди включение каждого отдельного приемо-передающего модуля в режим излучения зондирующего сигнала и приема отраженного сигнала от поверхности отрытой стоянки в течение времени, обеспечивающее электронное перемещение фазового центра реальной антенны по траектории в виде окружности, устройство обработки, устройство отображения и блок сравнения. Достигается упрощение получения высокодетального изображения ограниченного по площади участка. 3 з.п. ф-лы, 4 ил.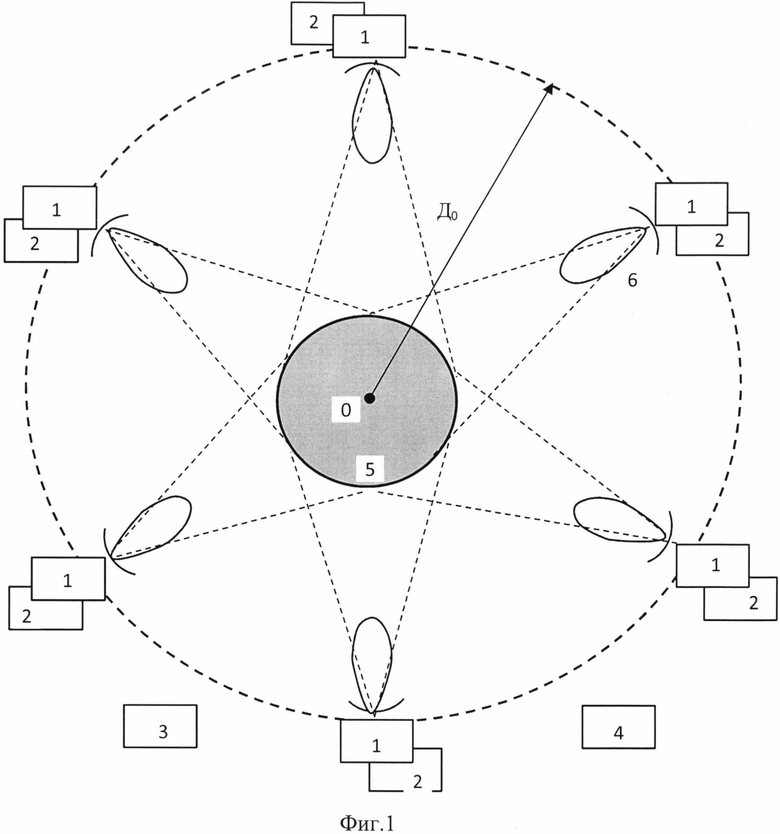
1. Радиолокационная система мониторинга открытых автомобильных стоянок и определения свободных парковочных мест, содержащая по меньшей мере четыре приемо-передающих модуля, расположенных вокруг наблюдаемой стоянки и включающих: антенную систему, обеспечивающую преобразование поступившего на ее вход зондирующего сигнала в электромагнитную волну и преобразование отраженного колебания от поверхности автостоянки в выходной высокочастотный сигнал, при этом главный луч диаграммы направленности антенны направлен в центр автостоянки, а ширина луча диаграммы направленности каждой антенны обеспечивает одновременное покрытие всей площади автостоянки; передающий и приемные тракты, выполненные с возможностью формирования зондирующего сигнала и предварительной обработки принимаемого сигнала; элементы синхронизации и управления, обеспечивающие функционирование распределенной радиолокационной системы, последовательное по времени и очереди включение каждого отдельного приемо-передающего модуля в режим излучения зондирующего сигнала и приема отраженного сигнала от поверхности отрытой стоянки в течение времени Тп, обеспечивающее электронное перемещение фазового центра реальной антенны по траектории в виде окружности; устройство обработки, устройство отображения и блок сравнения.
2. Радиолокационная система по п. 1, в которой устройство обработки выполнено с возможностью обеспечения совместной когерентной обработки выходных откликов каждого модуля в единой системе обработки, реализующей принцип синтезирования искусственной апертуры антенны;
3. Радиолокационная система по п. 1, в которой устройство отображения выполнено с возможностью визуализации детального радиолокационного изображения открытой стоянки автомобилей;
4. Радиолокационная система по п. 1, в которой определение свободных парковочных мест выполняется с помощью блока сравнения, обеспечивающего сравнение текущего радиолокационного изображения открытой стоянки автомобилей и сетки парковочных мест, построенной с использованием пассивных радиолокационных маркеров (отражателей), установленных на поверхности полотна автостоянки в характерных точках, определяющих конфигурацию сетки парковочных мест и открытой автомобильной стоянки в целом.

